自走式草莓施药机设计与轨迹仿真可靠性分析
2023-08-04 15:53:57贾梦实张莲洁顿国强高嵩黄晓文王诗雨
中国农机化学报 2023年7期
关键词:运动仿真
贾梦实 张莲洁 顿国强 高嵩 黄晓文 王诗雨
摘要:针对草莓植保机械化水平低、施药效果差、农药污染等问题,根据草莓垄道设计一款自走式草莓施药机。该施药机配备履带底盘、隔膜泵、机械臂及喷杆等部件。通过D-H参数法建立机械臂运动数学模型,推导出理论运动学方程,得到喷杆与各关节的相对位姿关系。通过Matlab软件进行机械臂运动仿真,模拟机械臂作业空间及轨迹。对机械臂作业轨迹进行可靠性分析,得出最佳速度参数。结果表明:施药机设计合理、推导的理论运动学方程准确,能够满足施药作业的需要,且达到作业轨迹可靠性原则的要求。当履带底盘速度为1.32m/s、基座转角速度为10.16(°)/min、大臂转角速度为30.41(°)/min、末端执行器转角速度为81.33(°)/min时,喷杆与作物能够保持稳定的相对高度,设备作业轨迹与理想作业轨迹最贴合。
关键词:植保机械;草莓施药;施药机械臂;Matlab;运动仿真
中图分类号:S22
文献标识码:A
文章编号:20955553 (2023) 070085
07
Design and trajectory simulation reliability analysis of a self-propelled strawberry applicator
Jia Mengshi, Zhang Lianjie, Dun Guoqiang, Gao Song, Huang Xiaowen, Wang Shiyu
(College of Mechanical and Electrical Engineering, Northeast Forestry University, Harbin, 150040, China)
Abstract: In response to the problems of low mechanization level, poor application effect, and pesticide pollution in strawberry plant protection, this article designs a self-propelled strawberry applicator for strawberry ridges. The pesticide applicator is equipped with components such as a track chassis, diaphragm pump, mechanical arm, and spray rod. Using the D-H parameter method, the mathematical model of the manipulators movement is established, the theoretical kinematics equation is derived, and the relative position and attitude relationship between the spray bar and each joint is obtained. The motion simulation of the robotic arm is carried out using Matlab software, and the operating space and trajectory of the robotic arm are simulated. Finally, reliability analysis is conducted on the trajectory of the robotic arm to obtain the optimal speed parameters. The results show that the design of the pesticide applicator is reasonable, and the derived theoretical kinematics equation is accurate, which meets the needs of the pesticide application operation and adheres to the reliability principle of the operation track. When the track chassis speed is 1.32m/s, the base angle speed is 10.16(°)/min, the boom angle speed is 30.41(°)/min, and the end effector angle speed is 81.33(°)/min, the spray bar and crop can maintain a stable relative height, and the equipment operation trajectory is aligns closely with the ideal operation trajectory.
Keywords: plant protection machinery; application of strawberry medicine; applicator arm; Matlab; motion simulation
0 引言
草莓作為广泛种植的经济作物之一,在生长、结果的过程中容易受病虫害的侵扰,为了保证其产量的稳定,农民需要采用化学农药来进行防治。目前,草莓施药作业仍以人工方式为主,存在作业强度大、效率慢,农药漏撒等问题。植保机械在保证高效精准作业的同时降低了人工强度和环境的污染,有助于提高农户的经济收益和降低成本,增强农业的可持续性,促进农业现代化的发展[12]。
针对农业领域中常见的农药漏洒污染以及高强度的人工施药问题,国内外众多学者对植保机械进行了大量研究。Zaman等[3]设计了一款农药实时现场喷洒自动变速喷雾器,该喷雾器采用超声波识别技术,对靶向作物进行超声波信号分析,获得靶向作物相对于喷杆的高度,并通过调整喷杆实现精准施药。权龙哲等[4]针对风速和设备移速等因素设计了抗风扰对靶机械臂,通过图像识别技术实现了喷头的精准施药。这些技术的开发对降低农药漏撒和污染的风险,减轻农民的劳动强度具有重要的现实意义。
结合国内外学者的研究结果来看,目前针对草莓作物使用的施药机研究相对较少。本文基于现有的农业施药机械研究,对机械臂改进创新设计,并根据草莓作物特点进行改善,设计自走式草莓施药机。
1 草莓施药机结构设计
1.1 草莓高垄栽培特点
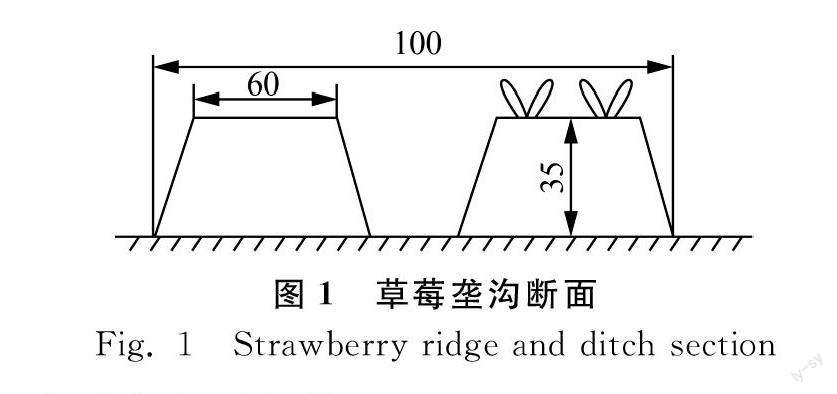
本文以最常见的草莓品种(宁玉草莓)为例,草莓的种植通常采用高垄形式栽培,该形式具有水肥调控、增产、土质松散和渗水性好等方面的优点。高垄种植的标准是单一垄面宽约长60cm,高度约在35cm,每个垄面上种植一到两行草莓。在实际生产中,高垄栽培已经成为草莓种植的主流模式,面积占总草莓种植面积的90%以上[5],如图1所示。
1.2 施药机结构设计
本文设计了一款适用于草莓作物施药的自走式草莓施药机,该施药机的设计基于国内外植保机械的优点,采用履带底盘作为移动平台,具有较好的减震效果,可以克服地形的凹凸起伏[6]。同时,隔膜泵和离合器配合的设计可以实现对药液的停顿,达到施药量均匀的效果[78]。在作业过程中,发动机提供施药机动力,并通过减速箱带动履带底盘移动。隔膜泵将药业箱中的农药抽取到喷杆喷头中,最终由机械臂带动喷杆达到作物冠层面的上方,完成作物施药作业,如图2所示。
在施药机作业过程中,由于草莓植株生长高度不一,施药喷洒高度需要根据作物高度进行调整。为此,施药机采用超声波探测作物冠层高度,来调整喷杆高度,确保实现理想的喷洒效果,从而减少农药的浪费与污染。喷杆被设计成可以同时对六条垄道进行施药作业。通过对作物发射和回收超声波信号,测量作物高度与喷杆的距离,机械臂根据信号调整喷杆高度。分支喷杆通过定位装置调整高度,与垄沟保持适当高度距离。机械臂和喷杆的调整,能够根据垄道的趋势来完成草莓施药作业,让药液完美的覆盖在作物冠层面上。自走式施药机械臂结构如图3所示。
1.3 机械臂结构设计
自走式草莓施药机的施药模块由机械臂的大臂和喷杆部件组成。在作业中,如果采用传统的大臂—小臂结构形式,那么机械臂的腕部下方会在调整高度的过程中产生施药喷洒死角。自走式草莓施药机的基座电机旋转角度设计在-60°~60°之间,保证大臂在最外角处时,末端执行器方便更换喷头。同时也使得大臂下侧被部件遮挡面积最小化,保证了施药效果稳定。大臂电机转角设计在0°~40°之间。喷杆电机转角设计在0°~15°之间。这样能够使得超声波感应器处于合适的接收信号高度。
1.4 机械臂轨迹可靠性分析
在理想状态下(设备匀速移动、无颠簸),喷杆能够与草莓作物的冠层面保持绝对范围内的稳定高度,此时喷洒效果最为理想。但是在实际中,施药机因为底盘和机械臂各关节速度变化等原因导致作业轨迹偏差,无法保持实际轨迹点与理论轨迹点重合。本文基于可靠性的原则,对设备移速,机械臂关节变量等因素进行分析。根据多组数据,利用Matlab软件对多组试验数据的作业路径进行分析。最终得出设备的最佳移速以及机械臂最佳关节变量速度。
2 自走式草莓施药机械臂运动学分析
2.1 施药机械臂正运动学分析
为实现自走式草莓施药机的精准施药效果,对机械臂位姿改变的描述非常重要。为了描述和分析机械臂的运动,需要建立机械臂各连杆之间、机械臂与周围环境之间的运动关系。采用建立D-H参数法,搭建自走式草莓施药机械臂的运动学模型,连杆坐标系如图4所示。根据机械臂各连杆的尺寸和建立的连杆坐标系,可得机械臂D-H连杆参数,如表1所示。
运用D-H参考系的齐次变换矩阵对机械臂的正运动学方程进行推导,从而获取喷杆末端位姿。通过齐次变换推导得出i-1iT,如式(1)所示。
i-1iT=
cosθi-sinθicosαisinθisinαiaicosθi
sinθicosθicosαi-cosθisinθiaisinθi
0sinαicosαidi
0001
(1)
式中:
i-1iT——
第i坐标相对于第i-1坐標的齐次变化的矩阵。
01T、12T、23T,再将01T~23T依次相乘可得出末端执行器(喷杆)相对于O1X0Y0Z0的相对位姿03T,如式(2)所示。
03T= 01T12T23T=
noap
0001
(2)
最终可得末端执行器的空间位置向量p,计算如式(3)所示。
px
py
pz
=
c1(a3c23+a2c2)
s1(a3c23+a2c2)
a3s23+a2s2
(3)
草莓施药机械臂空间位姿矢量[n o a]记为式(4)。
noa
=
c1s23-c1s23-s1
s1c23-s1s23c1
-s3c230
(4)
其中,s23=sin(θ2+θ3),c23=cos(θ2+θ3),ci=cosθi,si=sinθi。
2.2 施药机械臂逆运动学分析
自走式草莓施药机末端执行器的位姿点可以通过喷洒的靶向物坐标获得,即(n,o,a,p)已知。由于本次设计的机械臂整运动学中的参数di为零(关节处未产生偏移),所以在计算机械臂逆运动时,只求出关节变量θi即可。根据正运动学方程可知px,py,pz(末端执行器的正运动位置矢量),因此可得式(5)。
θ1=Atan2(py,px)
(5)
根据代数解法可知
a2c2+a2c23=px2+py2
(6)
令γ=px2+py2,
根据式(3)可得
c23=γ-a2c2a3
(7)
s23=pz-a2c2a3
(8)
根据三角函数可知
pz-a2c2a32+γ-a2c2a32=1
(9)
根據式(8)、式(9)整理可得
θ2=
Atan2(pzs2+γc2,pz2+γ2-(pzs2+γc2)2)-
Atan(γ,pz)
(10)
θ3=Atan2(pz-a2s2,γ-a2c2)-θ2
(11)
3 施药机械臂运动学仿真
3.1 单位时刻内作业空间可视化
自走式草莓施药机的机械臂作业区间为机械臂在作业过程中,单位时间内喷杆能够到达空间点的集合。对喷杆作业空间的可视化仿真,是检验机械臂位姿设计合理性的重要一项。根据D-H连杆参数,在Matlab中运用机器人工具箱进行仿真,结果如图5所示。
由图5机械臂作业空间仿真可以看出,在某单位时刻内,其作业空间类似于扇形。根据D-H连杆参数设计的机械臂作业过程中,理论设计的参数设计能够在大臂下方产生的死角最小化,能够满足作业的需要。
根据之前设计的D-H连杆参数,在Matlab中使用机器人工具箱,建立机器臂运动学模型并对机械臂进行运动学仿真,验证机械臂正运动学求解的正确性。其中,第一关节变量q1(-60°,20°,-15°)与第二关节量q2(60°,40°,0°)分别代入式(1)和机械臂运动学模型中。
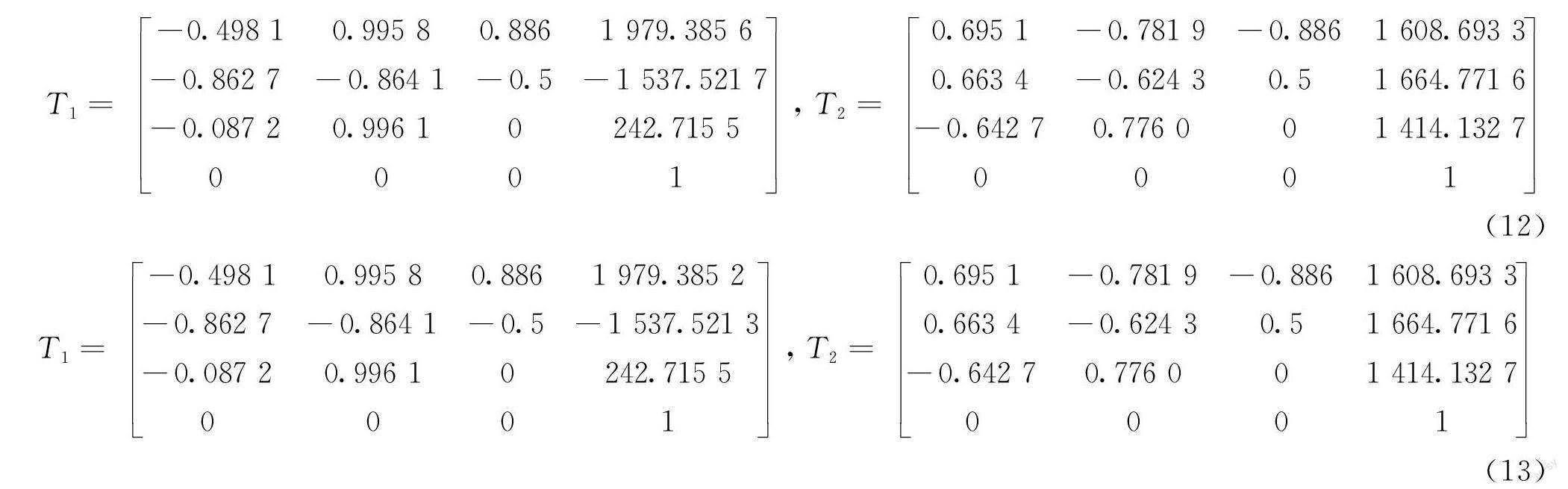
理论计算结果如式(12)所示。Matlab计算结果如式(13)所示。
对比结果可知,当输入q1与q2数值,理论计算结果与仿真结果一致,在机器人工具箱中得到的仿真位姿一样一致。由此证明理论设计的正运动学结果正确。
同时,本次试验仍要验证机械臂逆运动方程。在机械臂作业空间内随机获取30组关节变量数据,将数据代入式(1),得到喷杆最终的位姿,再通过新的喷杆位姿,代入逆运动方程中求解,最终获得新的关节变量θi。得出30组关节变量后,将作业空间内的关节变量与新获得的关节变量进行差值平均值的计算。结果如表2所示。通过计算结果可知,在逆运动方程计算出的结果与实际相差不大,数量级为10-5,趋近于0,结果表明逆运动方程正确。
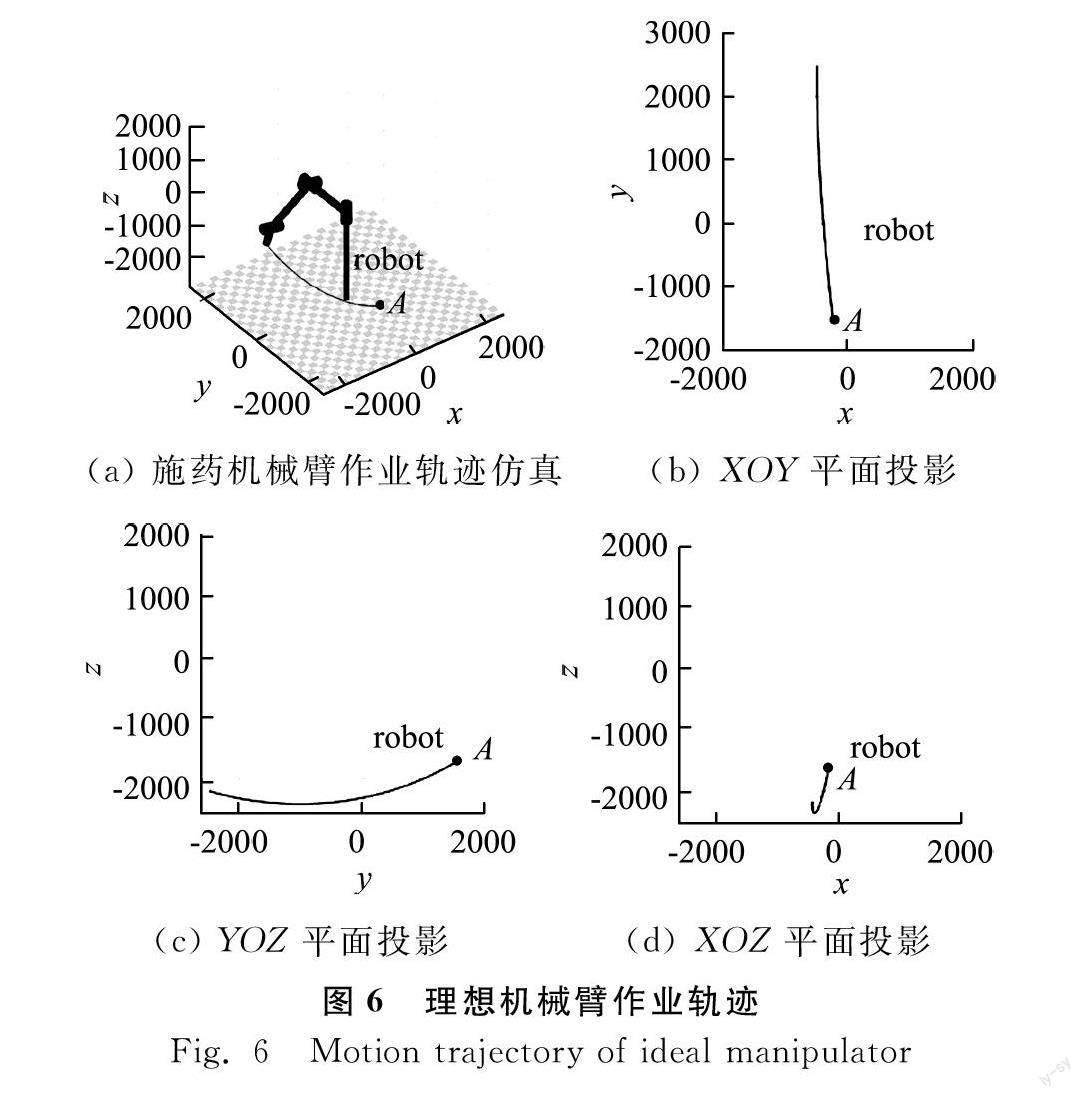
3.2 理想机械臂作业轨迹
在设备匀速状态下,由于此时设备移动加速和机械臂角加速度为零,所以机械臂任意单位时刻的轨迹点均处在理想作业轨迹上[9],机械臂各个关节都处于平稳状态下时,机械臂的作业轨迹是最为理想的。在作业过程中机械臂要根据草莓作物的高度进行关节转动,所以本文对此时状态机械臂各关节转速以及设备移速进行分析研究[10]。理想机械臂作业轨迹如图6所示。为了研究设备移速,关节变量速度对于轨迹的影响,故将履带底盘视为机械臂移动关节研究对象,并取设备移动2m作为研究区间(A点为作业轨迹起点)。由图6可知,在设备作业时,要根据垄道走势和草莓植株高度进行调节,以保证农药喷洒精准的效果。
4 施药机械臂作业轨迹可靠性分析
4.1 施药机械臂作业随机参数分析
对于机械臂可靠性的分析不同于对刚体可靠性的分析。对于机械臂可靠性的分析,分为机构可靠度分析、结构可靠度分析。本文选择对机构可靠度进行分析,针对机械臂位移、平移速度、加速度等因素进行研究。
自走式草莓施药机在进行作业时,需要基座、大臂、末端执行器等部件转动以及履带底座移动。所以将以上变量作为随机变量,在各个变量速度下,所产生的作业轨迹进行分析[11]。以末端执行器的末位置点以及设备作业2m时位置点进行研究,取运动误差阈值为5.0mm理想设备移速为1.3m/s。机械臂可靠度区间如图7所示。
4.2 机械臂运动学随机变量参数分析
对于机械臂作业轨迹变化的原因主要有设备行驶速度Vc、基座旋转角速度Vj、大臂旋转角速度Vd,末端执行器旋转角速度Vm等。基于以上作业中的随机变量,随机取得6组速度数据进行可靠性分析[12],最终得到设备最贴合理想状态下的参数。设备运动学变量的6组试验数据如表3所示。设定机械臂初始位姿为[0,0,pi/9,pi/6,pi/3],末端位姿为[0,2000,pi/12,-pi/6,pi/9],采样点为80。
4.3 关节变量速度结果分析
将表4中的关节变量输入之前建立好的机械臂模型中[13]。在各组关节变量影响下,形成的轨迹如图8所示。由图8可知在各个不同变量速度下(B为施药机作业方向),所产生的作业轨迹各不相同[14],为了使设备喷洒更加精确,避免漏撒发生,基于机械臂运动学可靠性原则对6组轨迹进行分析,最终得到与理想轨迹最为贴切的关节变量速度。
4.4 最佳关节变量速度
根据机械臂可靠原理,在理想作业轨迹上,取设备移动2m以及末端处进行研究。在理想作业轨迹处画出机械臂可靠性阙值区间,将阙值区域外部路径定为不可靠变量速度[15]。在可靠区间内的作业轨迹根据其在XYZ轴上的分量差值进行总结。机械臂可靠分析结果如表4所示。其中Vc-V0代表实际速度与理想速度差值,rx-rx0代表试验路径与理想路径在X轴上的差值,ry-ry0代表试验路径与理想路径在Y轴上的差值,rz-rz0代表试验路径与理想路径在Z轴上的差值,负值代表试验路径在分量上处于可靠阙值范围之内。
表4可知,在試验组1与试验组2的关节变量速度下,作业轨迹并不可靠,超出可靠阙值区间。由试验组3试验组5可知,3组变量速度下,作业轨迹均处于可靠区间内,但是试验组3的分量与阙值差值最小,由此可知试验组3的关节变量速度最贴合理想。
5 结论
1) 基于草莓作物种植特点,设计了一款自走式草莓施药机,包括履带底盘、机械臂、喷杆等。可实现对草莓作物精准施药作业,降低环境污染及种植成本,提高经济收益。
2) 运用D-H参数法建立机械臂运动学方程,在Matlab中仿真自走式草莓施药机的机械臂作业空间和作业轨迹,校准机械臂运动学方程。
3) 通过对自走式草莓施药机的机械臂作业轨迹可靠性分析,在6组数据的对比中得到组3数据最贴合理想作业轨迹。在可靠球域内,施药机移速仅差0.02m/s,X轴仅差-0.17mm,Y轴仅差-0.23mm,Z轴仅差-0.21mm。在此参数下能够满足草莓施药的需要,为相关草莓施药机的设计提供理论参考。
参 考 文 献
[1] 何雄奎. 高效植保机械与精准施药技术进展[J]. 植物保护学报, 2022, 49(1): 389-397.
He Xiongkui. Research and development of efficient plant protection equipment and precision spraying technology in China: A review [J]. Journal of Pesticide Science, 2022, 49(1): 389-397.
[2] 何雄奎. 中国精准施药技术和装备研究现状及发展建议[J]. 智慧农业(中英文), 2020, 2(1): 133-146.
He Xiongkui. Research progress and developmental recommendations on precision spraying technology and equipment in China [J]. Smart Agriculture, 2020, 2(1): 133-146.
[3] Zaman Q U, Esau T J, Schumann A W, et al. Development of prototype automated variable rate sprayer for real-time spot-application of agrochemicals in wild blueberry fields [J]. Computers and Electronics in Agriculture, 2011, 76(2): 175-182.
[4] 权龙哲, 郦亚军, 王旗, 等. 考虑风扰的对靶喷雾机械臂药液喷洒动力学建模与试验[J]. 农业机械学报, 2018, 49(6): 48-59.
Quan Longzhe, Li Yajun, Wang Qi, et al. Modeling and testing on liquid pesticide spray of serial manipulator target weeding robot considering wind disturbance [J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(6): 48-59.
[5] 刘继展, 吴硕. 草莓全程生产机械化技术与装备研究进展[J]. 农业机械学报, 2021, 52(5): 1-16.
Liu Jizhan, Wu Shuo. Research progress and prospect of strawberry whole-process farming mechanization technology and equipment [J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(5): 1-16.
[6] 初晓庆, 张晓辉, 刘刚, 等. 有边界式棉田喷雾机的研制与试验[J]. 中国农机化学报, 2016, 37(7): 51-56.
Chu Xiaoqing, Zhang Xiaohui, Liu Gang, et al. Development and experiment on bounded type cotton field sprayer [J]. Journal of Chinses Agricultural Mechanization, 2016, 37 (7): 51-56.
[7] 李志强, 陈黎卿. 农业植保机器人研究现状及展望[J]. 玉林师范学院学报, 2020, 41(3): 1-14, 2.
Li Zhiqiang, Chen Liqing. Research status and prospect of agricultural plant protection robot [J]. Journal of Yulin Normal University, 2020, 41(3): 1-14, 2.
[8] 王克奇, 张维昊, 罗泽, 等. 击打式松果采摘机器人设计与试验[J]. 农业机械学报, 2020, 51(8): 26-33.
Wang Keqi, Zhang Weihao, Luo Ze, et al. Design and experiment of hitting pine cone picking robot [J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(8): 26-33.
[9] 李揚, 程维明, 宫成文, 等. 5-DOF机械臂运动学分析及运动轨迹规划[J]. 中国农机化学报, 2018, 39(9): 16-21.
Li Yang, Cheng Weiming, Gong Chengwen, et al. Kinematics analysis and motion trajectory planning of 5-DOF manipulator [J]. Journal of Chinses Agricultural Mechanization, 2018, 39(9): 16-21.
[10] 王林军, 邓煜, 罗彬, 等. 基于MATLAB Robotics Toolbox的ABB IRB1660机器人运动仿真研究[J]. 中国农机化学报, 2017, 38(1): 102-106.
Wang Linjun, Deng Yu, Luo Bin, et al. Study on motion simulation of ABB IRBI1660 robot based on MATLAB Robotics Toolbox [J]. Journal of Chinses Agricultural Mechanization, 2017, 38(1): 102-106.
[11] 冯嘉珍, 张建国, 贾庆轩, 等. 机械臂运动轨迹可靠性分析的自更新响应面法[J]. 北京邮电大学学学报, 2017, 40(4): 35-40.
Feng Jiazhen, Zhang Jianguo, Jia Qingxuan, et al. Manipulator trajectory could self updating response surface method for reliability analysis [J]. Journal of Beijing University of Posts and Telecommunications, 2017, 40(4): 35-40.
[12] 杨铭涛, 梁喜凤. 番茄枝叶裁剪机械臂设计与运动学分析[J]. 中国农机化学报, 2021, 42(4): 8-14.
Yang Mingtao, Liang Xifeng. Design and kinematics analysis of a tomato branch and leaf cutting manipulator [J]. Journal of Chinese Agricultural Mechanization, 2021, 42(4): 8-14.
[13] 王丽燕, 胡玲, 李剑敏, 等. UR10工业机械臂位置精度及可靠性分析[J]. 现代制造工程, 2020(9): 46-52.
Wang Liyan, Hu Ling, Li Jianmin, et al. Analysis of UR10 industrial manipulator positioning accuracy and reliability [J]. Modern Manufacturing Engineering, 2020(9): 46-52.
[14] 张树刚, 赵佳. 基于S型曲线的包装堆垛机器人轨迹规划[J]. 包装工程, 2018, 39(1): 136-140.
Zhang Shugang, Zhao Jia. Trajectory planning of packaging palletizing robot based on S-curve [J]. Packaging Engineering, 2018, 39(1): 136-140.
[15] 张豪. 基于可靠性的机械臂运动优化控制与仿真研究[J]. 内燃机与配件, 2018(23): 7-9.
猜你喜欢
科技创新与应用(2017年6期)2017-03-23 13:34:49
山东工业技术(2017年3期)2017-03-16 11:55:21
教育教学论坛(2016年52期)2017-03-12 20:39:47
中国科技博览(2016年25期)2016-12-20 19:50:49
汽车科技(2016年6期)2016-12-19 20:32:56
东方教育(2016年3期)2016-12-14 13:03:34
科学与财富(2016年12期)2016-11-01 17:49:52
科技视界(2016年17期)2016-07-15 15:02:52
考试周刊(2016年22期)2016-05-06 10:14:38
科技视界(2016年10期)2016-04-26 12:13:45