基于Quest3D虚拟分层装配及运动仿真的设计应用
2016-04-26 12:13李才波梁利东胡阿敏
科技视界 2016年10期
李才波+梁利东+胡阿敏

【摘 要】本文提出一种针对机械工业产品的虚拟分层装配及运动仿真的设计方法。以UG NX进行三维建模,运用Quest3D引擎平台对产品模型进行虚拟场景的实施驱动和人机交互控制,实现产品的分层序列拆装及运动仿真功能。实验结果表明系统具有较好的沉浸感和应用价值。
【关键词】虚拟现实;分层装配;运动仿真;Quest3D
0 引言
虚拟装配作为虚拟制造技术[1-3]的重要组成部分,近年来得到了学术界和工业界的广泛关注,并对敏捷制造、虚拟制造等先进制造模式的实施具有深远影响。利用虚拟装配,可以验证装配设计和操作的正确与否,以便及早的发现装配中的问题。而通过虚拟运动仿真,可模拟产品运动状态下运动设计精度的准确度。通过反馈信息可对模型进行修改,并通过可视化显示装配运动过程。运用该技术不但有利于并行工程的开展,而且还可以大大缩短产品开发周期,降低生产成本,提高产品在市场中的竞争力。虚拟装配改善传统以经验为主、装配滞后于加工设计的弊端。本文提出基于Quest3D的虚拟装配及运动仿真的实现方法,依据零件的装配分层关系实现序列拆装,并给出虚拟装配系统的设计方法和案例。
1 分层序列装配模型
由于机械产品结构复杂,每个零部件之间都有严格的装配关系[4-5],无论是拆还是装都需要按照设计的装配结构来进行。本文采用层次化序列装配模型,即将产品的整体结构按照其真实的装配标准按层次划分或分解为不同级别的能够进行独立装配的装配单元,形成并行装配序列。通常产品的装配单元可分为:零件、合件、组件、部件、机器五个等级的装配体,装配时,按照上述等级依次分解,上一级包含下一级子装配体,下一级子装配体又包含更下一级子装配体直至最终不可分解的零件,其中每一级装配体按照其装配次序形成序列。层次化模型的优点在于更清晰表达产品中零部件之间的层次关系,并可以用子装配体表达一组功能上或物理结构上相关的零件集,可减少装配分析的复杂性,简化问题的求解过程。图1 为分层序列装配示意。
几点说明:
(1)在装配模型设计中,每一层装配体都会存在基准件,按照装配工艺要求将基准件设为该层序列的第一个装配体,以保证满足装配标准和装配精度;
(2)装配单元的划分依据具体机械产品的装配要求,如果在某层子装配体中如(部件层)出现单一零件时,该类零件则视为部件级零件,可以直接在相应层中进行装配顺序排序。
2 基于Quest3D的虚拟装配系统设计
2.1 系统总体架构
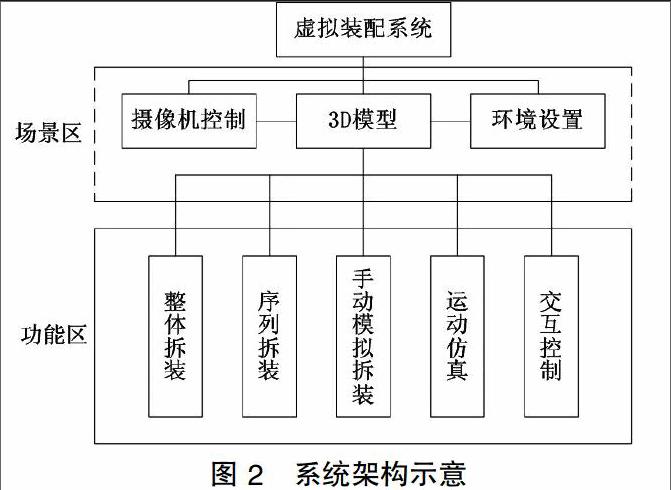
本文的虚拟装配系统分为两个区,即场景区和功能区。场景区包括摄像机控制、3D模型导入和显示、环境设置。其中,摄像机控制是根据用户需求实现对模型及场景的浏览漫游功能如移动、旋转和缩放等;3D模型导入和显示则是基于原始模型实现数据转化和表示,每个零件都具有位置、材料及贴图信息属性;环境设置包括场景布置、灯光设置以及UI设计。功能区由五个功能模块组成,分别为:整体拆装模块、序列拆装模块;手工模拟拆装模块及运动仿真模块。如图2所示。
2.2 模型导入转化及场景设置
通过UG NX三维建模,生成原始数据模型,应用Deep Exploration软件将prt文件模型进行文件格式转换为dae文件,然后导入到Quest3D中。Quest3D可对导入所有数字内容的进行设置和编制。由于机械产品结构复杂,所包含零件繁多,Dae初始模型是分成若干个可装配的零部件,需要通过程序定义其在场景中的世界坐标及彼此位置关系,用3D render场景模块把它们组合在一起并显示。
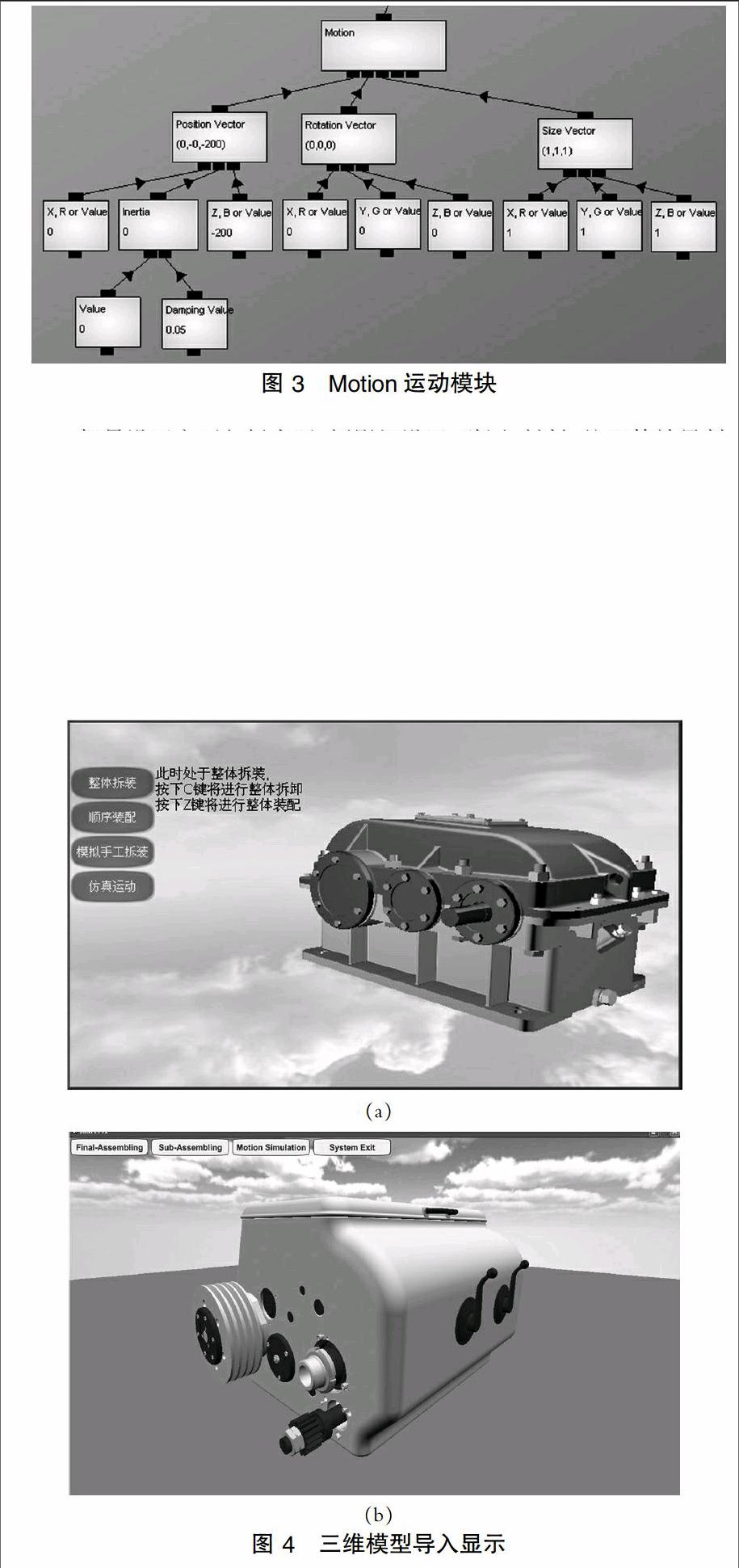
为了能更好控制每个零部件装配运动状态,在Quest3D中可添加Motion模块作为每个可装配零部件的运动属性[6],如图3所示。为保证零件装配运动速度可调节性,Quest3D 提供阻尼模块参数Damping value,将其与运动方向建立联系。在拆或装时候,阻尼参数发挥作用,Damping 值增加时,阻尼增大,零件装配运动减慢,反之亦然。
场景设置主要包括光照、摄影机设置、贴图、材料、纹理等效果制作。光照采用平行光源和点光源从摄像机的投射方向给予模型物体较好的立体视觉效果,增强用户的沉浸感和系统的交互性。摄影机是用于确定观察者位置和投射方向以及与物体相对空间视窗的对应关系。系统采用物体注视摄像机(Object Inspection Camera)作为场景的交互窗口,通过调节摄像机的Position Vector,Camera Matrix和Camera Target模块参数,设定摄像机的位置、缩放的范围等,用户即可利用三维鼠标就可以对三维场景中所有物体进行浏览操作。图4为三维模型导入效果图中,(a)为一个二级减速器,(b)为车床主轴箱。
2.3 装配及运动设计
Quest3D中的三维模型中各个装配体依据装配单元建立层级链表,即确定拆装过程的序列。每个装配体都具有Motion模块属性,包括postion Vector(位置)、Rotation Vector(旋转)和Size Vector(缩放),拆装的原理是根据装配序列依次对装配体的各个矩阵中参数的进行改变设置,从而实现装配体的平移运动和旋转运动,以达到零部件装配效果。
虚拟装配过程分为整体拆装、顺序拆装及模拟手动拆装方式。整体拆装是对整个模型一次性实现拆分和装配过程,体现“爆炸”效果;顺序拆装是按照装配单元依次进行拆装;模拟手动拆装则是通过建立工具箱模块,用户可从工具箱中选择合适工具模拟真实拆装过程。无论以何种方式进行装配,拆装模块作为独立模块可进行重复调用,表1为拆装模块中相关设置参数表示。
系统的UI模块是用户实现装配操作的交互窗口,不同类型的机械产品可根据其复杂程度和操作方便性、人性化原则进行设计。本系统可用三维鼠标实现场景模型的移动、旋转和缩放,同时设置菜单、按钮、复选框等控件进行装配过程的选择、设置和操作。图5是减速器(a)和车床主轴箱(b)虚拟拆装图示,图6为CA6140车床的18级变速虚拟传动示意图。
3 结论
本文提出了分层装配思想应用Quest3D 引擎开发的虚拟装配和运动仿真系统可用于不同类型的机械产品模型,通过建立虚拟场景、UI功能模型有效达到了用户对于产品的交互操作,其虚拟装配过程和运动仿真对于企业设计制造及高校实践教学提供了较好的虚拟现实平台。
【参考文献】
[1]宁汝新,郑轶.虚拟装配技术的研究进展及发展趋势[J].中国机械工程,2005,8 (16):139-144.
[2]韦有双,杨双龙,王飞.虚拟现实与系统仿真[M].北京:国防工业出版社,2004:15-20.
[3]吴启迪.系统仿真与虚拟现实[M].北京:化学工业出版社,2002:130-135.
[4]唐力.虚拟维修拆卸层次与维修空间划分方法研究[J].机械制造,2007:45-48.
[5]刘振宇,谭建荣,张树有.面向虚拟装配的产品层次信息表达研究[J].计算机辅助设计与图形学学报,2001,13(3):223-228.
[6]路朝龙.Quest3D 从入门到精通[M].北京:中国铁道出版社,2012:7-26.
[责任编辑:杨玉洁]
猜你喜欢
重庆文理学院学报(社会科学版)(2017年5期)2017-10-23
汉语世界(2017年3期)2017-06-05
汽车科技(2016年6期)2016-12-19
东方教育(2016年3期)2016-12-14
海外星云(2016年7期)2016-12-01
发明与创新(2016年26期)2016-08-22
考试周刊(2016年22期)2016-05-06
现代电子技术(2015年8期)2015-07-09
中国科技术语(2012年3期)2012-03-20