自主式口腔种植机器人模型实验的精度分析
2023-08-03 13:05林周兴高跃张晓蕾尹传蓉邓悦
实用口腔医学杂志 2023年4期
林周兴 高跃 张晓蕾 尹传蓉 邓悦
种植修复治疗缺失牙已经是目前市场主流的治疗方案。良好的种植体三维位置是保证种植体长期稳定的重要因素,缜密的术前设计是确保种植体精准植入的先决条件[1]。为了优化种植修复的效果,目前已经引入引导式的种植治疗方案[2],尤其在骨量有限或前牙美学区域,正确的种植体植入是获得以修复为导向治疗效果的基础。数字化手术导板的使用可以满足常规的种植修复效果,包括精准的放置种植的位置,节省更多的临床操作时间,以及减少术中并发症的发生等[3]。但是计算机辅助设计/计算机辅助制造的3D打印数字化导板仅能提供有限的引导信息,术中无法改变手术计划。此外,数字化导板还可能出现折裂,受开口度影响,缺牙区空间不足以及水冷却不足等问题[4]。汲取虚拟规划的特点,在光学追踪的引导下,动态导航可以显示种植位点的偏差信息并实时地反馈和引导术者调整种植手机的方向[5]。但是与数字化导板一样,动态导航仍然需要手动操作,无法避免术中的人为误差。结合数字化导板和动态导航的优点,过去20年国内学者专注研究种植机器人的开发。直到2017年,世界上第一台种植机器人“YOMI”获得美国FDA的许可[6]。同年,我国空军军医大学第三附属医院赵铱民教授团队与北京航天航空大学共同研发了自主式机器人“雅客智慧”(YAKEBOT)获得全国牙科健保计划协会(National Association of Dental Plans,NADP)的认可。虽然相关的机器人实验证实种植机器人可以达到前所未有的精度[7],但无论是国内还是国外,种植机器人的临床使用仍然处于初级阶段,相关的研究还比较少,因此本文的目的是评估和分析自主式种植机器人在口外颌骨模型上的精确度。
1 材料与方法
实验流程如图1,种植工具(雅客智慧种植机器人)为图2,本次实验所有操作和数据处理均有一名实验员操作。
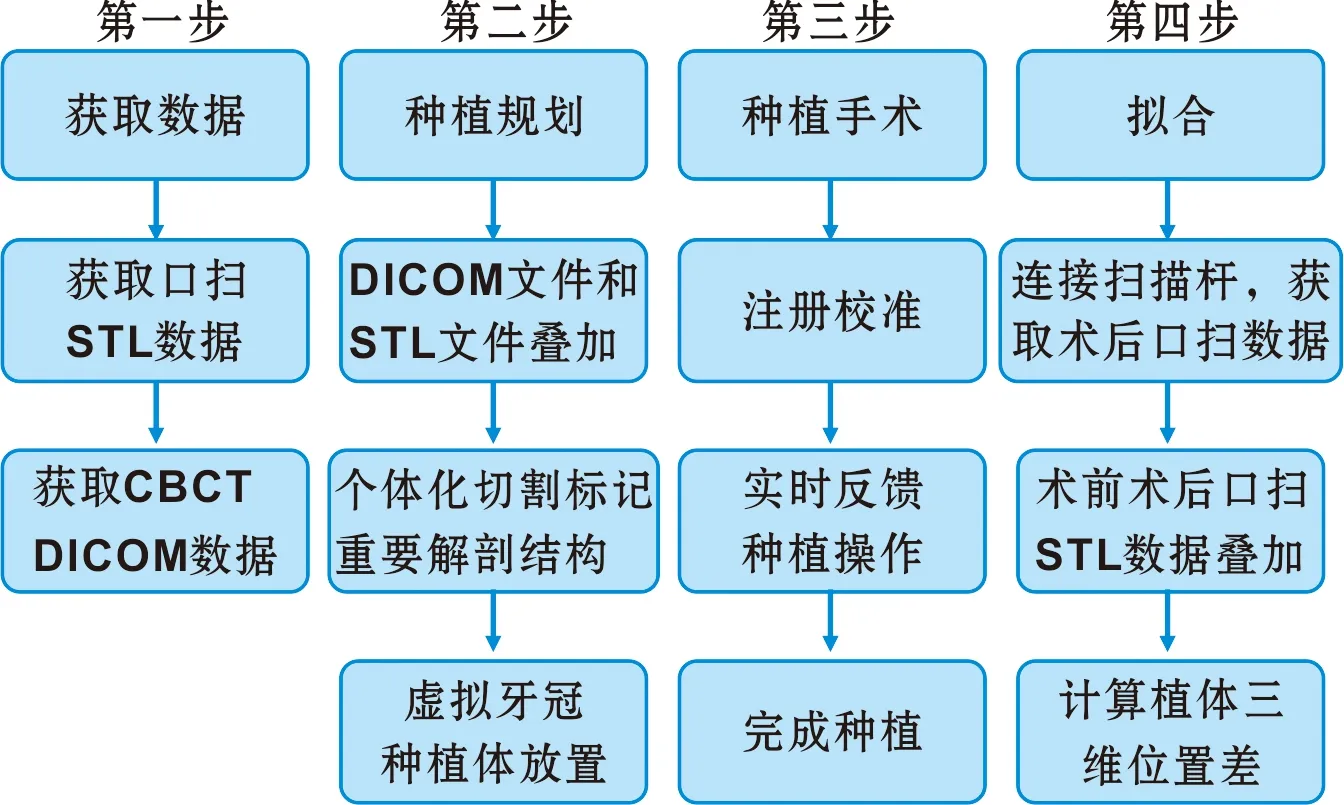
图1 实验步骤

图2 雅客智慧种植机器人
1.1 数据获取
1.1.1 口腔模型制备(图3) 本次使用标准上下颌牙列缺损口腔模型进行口腔扫描仪(频泰2 V1.14 中国)后获取STL(Surface Tessellation)数据,包括牙冠和粘膜等信息。STL数据导入模型处理软件(3-Matic V12.0,Materialise,比利时)上进行模型布尔运算处理(图3A~B),包括模拟拔牙窝即刻种植位点21,31 (FDI牙位记录法)、模型内部挖空并网格充填模拟骨皮质和骨松质。处理后上颌模型缺失牙位为11,16-17,21,25-26,下颌模型缺失牙位为31,35-36,41,45-47。模型处理完成后,采用模型树脂(2.0 UV,广州黑格)在3D打印机(广州黑格,UltraCraft ChairSide Pro)打印、超声冲洗、充分固化、干燥(图3C)。
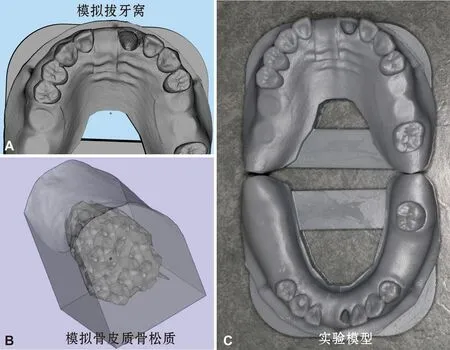
图3 模型制备
1.1.2 获取STL数据 实验模型使用口腔扫描仪(2 V1.14,成都频泰)进行口扫获得STL数据,扫描方法为从模型左侧(27或37)颊面远中开始到右侧远中游离端,再绕回牙合面和舌面回到扫描起点,初步采集模型表面特征后,重复1次上述扫描顺序保证口扫真实度和精确度。
1.1.3 获取DICOM数据 将模型进行CBCT(体素0.2 mm,片厚0.1 mm,曝光时间 8 s,120 kV,6.3 mA Planmeca ProMax®3D Classic,芬兰)扫描获取DICOM数据。
1.2 种植规划
将上述2 个数据导入机器人自带种植规划软件(DentalNavi,版本1.1.4 ),通过离散分布的3 点对齐加点云对齐的方式将STL文件和DICOM文件对齐(图4)。对齐后先放置虚拟牙冠,然后选择适当的种植体和选择虚拟扫描杆,为了便于术后统计,所有种植体均采用Straumann(4.1 mm×10 mm BLT,瑞士)规划种植程序,选择合适的种植手机工作角度,保证手机工作过程无视野阻挡。设计牙支持式定位导板,放置注册孔(孔径最大1.5 mm,尖端0 mm)5 个均匀分布剩余牙位的牙尖上,方便观察和引导注册。导板范围不涉及远中游离端,marker连接管放在前牙区。设计完成后种植导板使用导板树脂(黑格 surgical guide UV)3D打印(图5)。

图4 STL文件和DICOM文件对齐
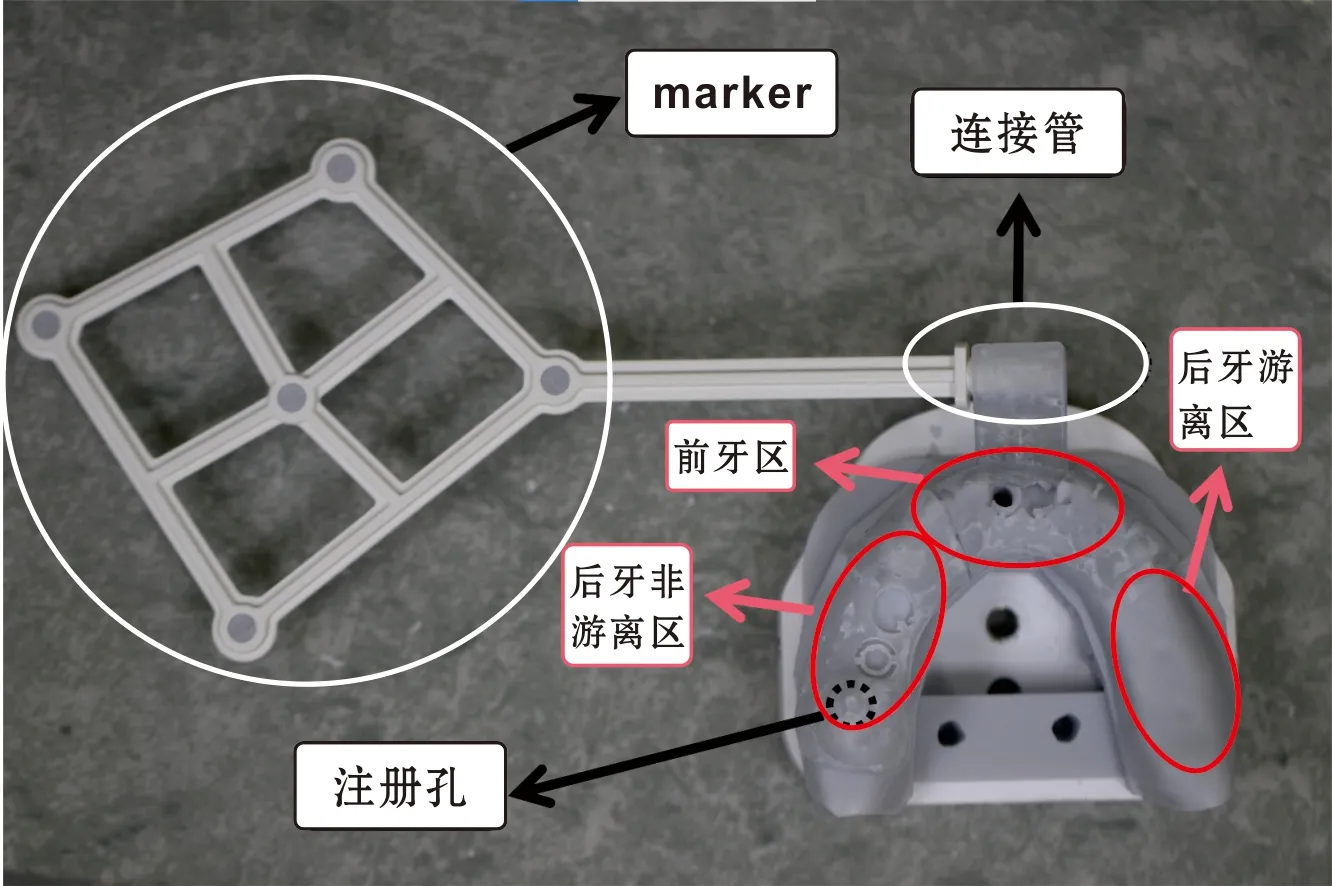
图5 手术配件
1.3 种植手术
1.3.1 注册(registration)和校准(calibration) 在红外光学定位仪(FusionTrack 250,Atracsys公司,瑞士)的追踪下,开启导航软件DentalNavi,依次进行机械臂(UR,Universal Robot,丹麦)注册,标定盘注册,标定探针注册,定位导板注册。探针和定位导板标定时保证5~6 个位点误差小于0.2 mm,标定后行标定探针再次检验注册和校准效果。
1.3.2 种植体植入 为了方便操作,操作者位于模型右侧,marker朝向模型左侧,手术过程均均以“右侧到向左侧”的顺序进行种植,所有的种植体均为4.1×10 BLT,种植手机(CX235 佛山宇森),种植程序根据ITI(International Team For Implantology)指南全程植入。
1.4 术后拟合
1.4.1 完成种植手术后 所有种植体安装扫描杆(CARES Mono-Scanbody,strauman,瑞士),然后进行口腔模型扫描获取STL数据,扫描方式同1.2所述,确保扫描杆信息完全被采集(图6A)。
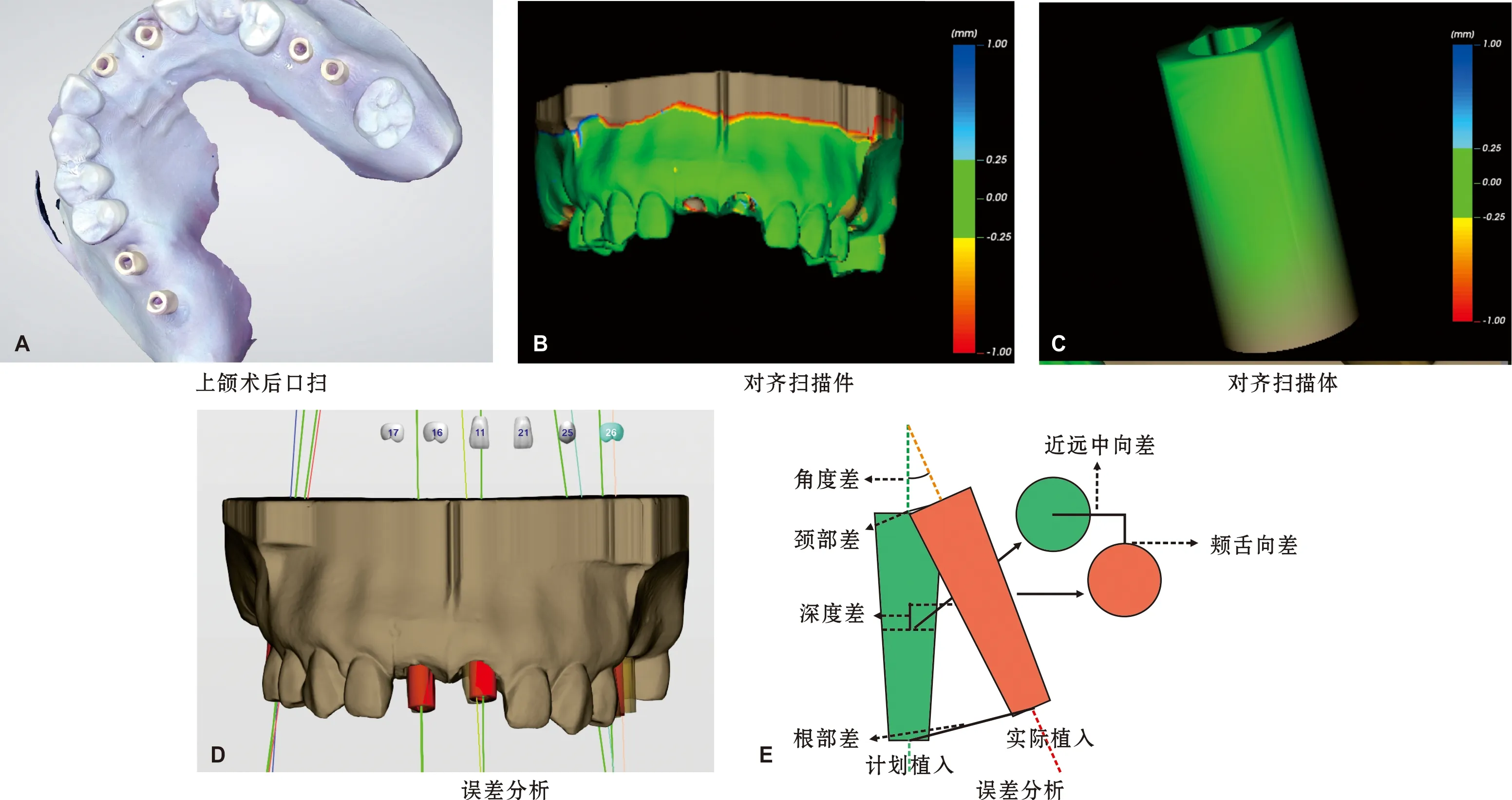
图6 术后拟合
1.4.2 对齐扫描件和扫描杆 术后口扫数据导入软件,采用3点齐加点云对齐的方式首先对齐术前、术后扫描件(图6B),确认扫描件对齐后(绿色表示精准对齐,蓝色表示正向错位,红色表示逆向错位),对齐术后扫描杆和术前虚拟扫描杆(图6C)。
1.4.3 误差分析 所有的扫描杆对齐后,软件自动计算种植体的三维位置偏差,包括种植体的颈部、种植体根部、角度、颊舌向、近远中向以及深度等(图6D、6E)。
1.5 统计学方法
使用SPSS 25(IBM,美国)软件进行统计分析,使用Shapiro-Wilk检验和F检验分析数据正态性及方差齐性。对符合正态分布且方差齐的数据,使用独立样本t检验分析差异;对符合正态分布但方差不齐的数据,使用Welch检验分析差异;对不符合正态分布的数据,使用Mann-WhitneyU检验分析差异。以P<0.05为差异有统计学意义。
2 结 果
总共植入130 颗标准种植体,所有植体均具有足够的初期稳定性(扭矩≥15 N)。如图7,平均种植体颈部偏差为(0.68±0.34) mm,其中最大值为2.21 mm,最小值0.09 mm。种植体根尖部的偏差为(0.83±0.41) mm,最大值2.21 mm,最小值0.17 mm。种植体的角度差为 1.91°±1.1°,最大值6.87°,最小值0.22°。颊舌向偏差而言,一共66 颗植体偏舌侧,平均0.29 mm。62 颗植体偏颊侧,平均0.45 mm。近远中向而言,59 颗偏近中,平均0.36 mm,64 颗偏离远中,平均0.40 mm。对于深度,64 颗植体浅种,平均0.34 mm,66 颗种植体深种,平均0.52 mm。
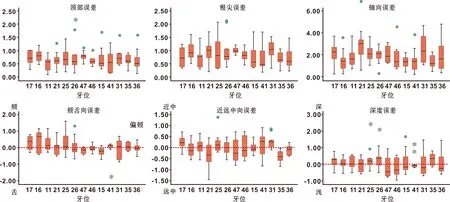
图7 误差分析
2.1 上下颌比较(排除21,31)
上颌植体颈部误差为(0.71±0.39) mm,根部误差为(0.87±0.46) mm,角度差为1.89°±0.71°,下颌植体的3 项值分别为颈部偏差(0.65±0.32) mm,根部为(0.76±0.35) mm,角度差为1.65°±1.00°。相比之下,整体上颌的偏差均大于下颌,但是组间比较均无统计学差异(P>0.05)。(表1)。
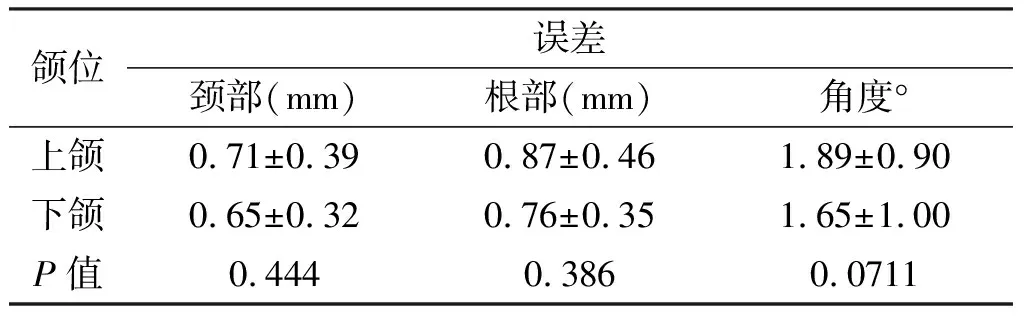
表1 上颌与下颌的种植误差比较
2.2 前牙区和后牙区比较(排除种植位置21和31)
前牙区种植体颈部偏差为(0.53±0.33) mm,种植体根部偏差为(0.72±0.40) mm,种植体角度偏差为1.64°±1.01°。在后牙区3 项数据分别为(0.71±0.35) mm,(0.83±0.40) mm,1.79°±0.94°,相比前牙区数值均较大,但是没有统计学差异(P>0.05)(表2)。
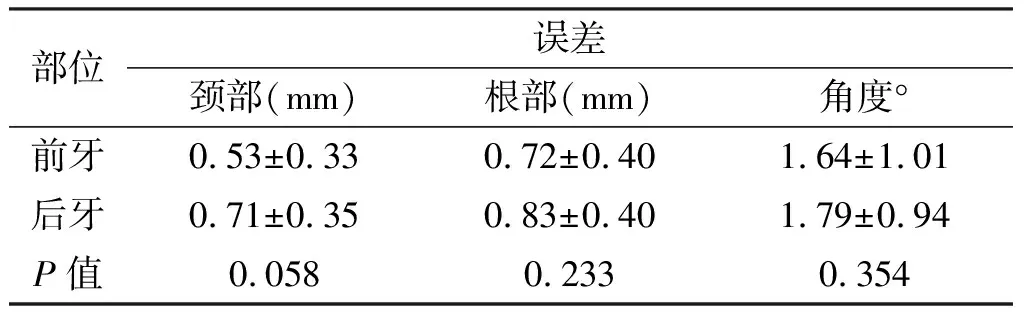
表2 前牙区和后牙区种植误差比较
2.3 前牙即刻种植与延期种植组比较
前牙区,即刻组的颈部偏差为(0.70±0.30) mm,根部偏差为(0.99±0.43) mm,角度偏差为2.72°±1.51°。延期组3 项数据分别为(0.53±0.32) mm,(0.71±0.40) mm,1.64°±1.02°,均小于即刻组,其中颈部误差无统计学差异(P>0.05),而根部和角度偏差均有统计学意义(P<0.05)(表3)。
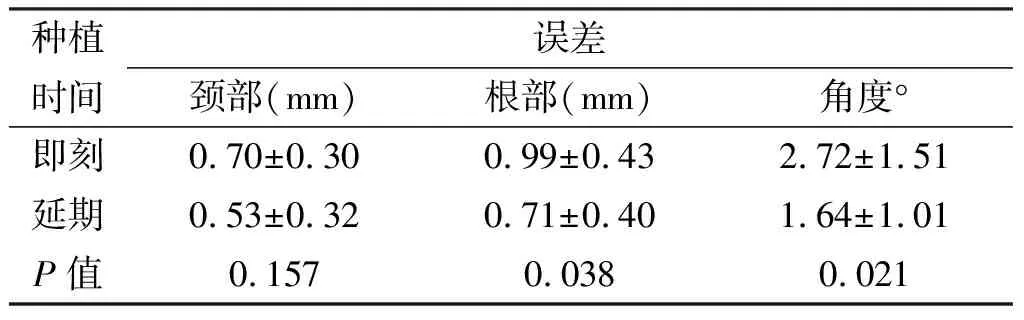
表3 即刻组与延期组种植误差比较
2.4 后牙区游离端缺失与非游离端缺失比较
后牙游离端,种植体的颈部偏差为(0.71±0.27) mm,根部误差为(0.85±0.33) mm,角度偏差为1.76°±0.95°。在后牙非游离端区域3 项数据分别为(0.71±0.43) mm,(0.81±0.49) mm,1.82°±0.95°。两组数据大小相当,均无统计学差异(P>0.05)(表4)。
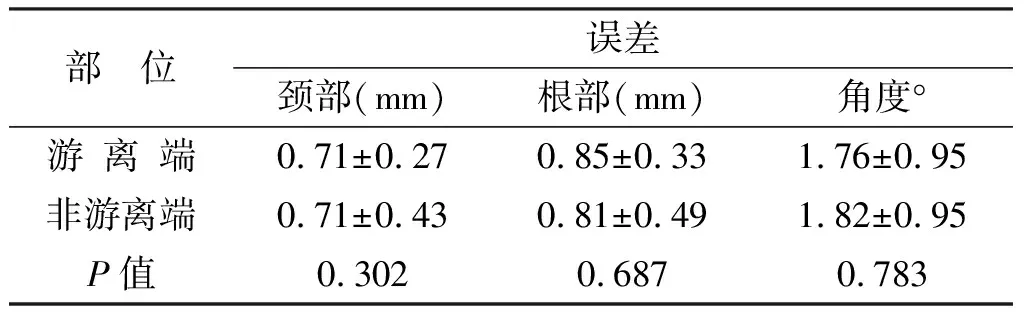
表4 游离缺失组与非游离缺失组种植误差比较
3 讨 论
本次实验过程中,为了尽可能排除人为操作的误差以及探索种植机器人植入的精确性,所有截骨备洞,植入操作,均有机器人全程完成,能够获得非常精准的治疗效果。但术后精度验证的影响因素是复杂多样的,包括CBCT的阈值,曝光时间,口扫的方式,数据配准,种植规划,每个手术部件的误差,定位导板的打印等。本实验为了尽量减少人为因素对实验结果的干扰,全程均由一名实验员完成。此外,为了保证手术模型的一致性,减少导入规划软件时口扫STL数据的误差,采用相同打印模式3D打印模型后,对模型进行二次扫描。过去10 年,数字化导板被认为种植精确度的金标准,Eftekhar等[8]回顾研究临床误差数据表明,颈部(1.35±0.59) mm 、根部(1.34±0.70) mm 和角度差3.59°±1.96°,均大于实验误差。
由于数字化导板的使用的局限性,动态导航逐渐被纳入临床使用,Pellegrino等[9]人体外证明,即便是经验丰富的工作者,动态导航种植体颈部、根尖和角度分别为(1.55±1.08) mm、(1.44±0.95) mm和2.93°±1.50°。他们认为动态导航是可靠的种植工具,术者的经验对导航系统的使用没有明显差异,但是他们无法避免手术过程术者的手部震颤和视觉疲劳。种植机器人可以克服这些缺点,因此本实验在模型上结果更加精准。就机器人的使用原理而言,“零力控制”是工作者——机器人协同操作的重要组成部分[10],根据力传感器输出,机械臂末端效应器才能受操作者的操控,因此探索机械臂去零后,重力是否对种植方向有影响。发现上颌的整体数据偏差均大于下颌,但无明显差异,可能是由于上颌模型与上颌定位导板受到重力的影响,导致定位导板的戴入可能存在偏差,这与Zhou等[11]的文献回顾数字化导板的临床使用效果相似。她们发现部分研究的结果显示上下颌位的角度差值有统计差异,其余变量无统计差异。有趣的是,Deeb等[12]的实验表明,无论是动态导航还是数字化导板,下颌的误差均大于上颌,一部分归因于上下颌骨骨质的质地分布不一,另一部分归因于手术操作上下颌位的习惯。实验结果证明,机器人手臂可以有效解决这一问题,避免种植过程导致更大的角度偏差。
根据导板的设计,将marker连接管放置在前牙区域,排除即刻种植位置21、31后,发现前牙区的误差小于后牙区域,结果优于Abduo等[13]全程数字化导板结果,它们前、后牙角度偏差约为2.4°~2.6°,均大于实验数据1.64°~1.79°。误差可能是由于颌骨模型的刚性连接固定,在截骨过程中产生的震动,前牙区较后牙区震动幅度较小,因此前牙区种植时,marker更稳定,产生的幅度较小。但是由于前牙区的样本数量远小于后牙区域(2∶9),这可能会导致更多的统计误差。
牙拔除后,牙槽骨会呈现不同程度的吸收,这导致牙槽嵴顶会出现不同的骨斜面,因此为了验证骨斜面是否影响种植体植入的精确性,将21,31进行数字化拔出后模拟即可种植为位点,分别与对侧同名牙11,41进行比较,结果证明,与延期种植相比较,即刻组导致的误差在颈部轻微偏大,但是根尖部分和角度差异明显增大。Thangwarawut等[14]使用全程导板在口外模型实验中,骨斜面60°时,根部误差(1.01±0.25) mm较实验数值大,但是颈部误差为(0.52±0.17) mm,角度偏差为1.89°±0.48°,均比即刻组的误差小,这可能是前牙区即刻种植以修复为导向的原则下[15],前牙偏腭侧的放置 ,增加了骨斜面的角度,导致钻针在截骨过程容易向阻力较小的一侧移动[4]。此外,种植程序缺少平骨钻,这导致在倾斜骨面的截骨会带来额外的误差。因此建议临床医师在即刻种植病例中适当添加骨面平整钻以减少骨面坡度对截骨的影响。
为了提高种植精确度,本实验机器人定位导板采用牙支持式,并且范围覆盖全牙列。El等[16]体外研究发现,传统数字化导板在后牙区域,远中游离缺失的牙位种植体颈部和根尖偏差分别为(0.78±0.07) mm和(1.18±0.16) mm,显著高于非游离缺失部位(0.55±0.04) mm和(0.84±0.08) mm。但与他们的实验结果不同,本实验游离端的精确度略差于非游离端,但两者没有明显差异。与传统导板不同的是,机器人种植定位导板无需延伸至远中游离端,并且在游离端缺牙区无法建立注册孔(图5),术区与注册孔的距离可能是影响精确度的因素,但数据证明,其影响程度可以忽略不计。
但是,同样是自主式机器人,与白石柱等[7]结果相比较,他们动物实验的种植精度高于实验结果,其结果可能是由于种植的牙位仅局限于前磨牙区,避免了多颗牙种植手术的误差积累。此外,他们的实验缺乏比较不同术区对精确度的影响。
此外,与临床常见的术后CBCT结果匹配方式不同的是[7-10],为了减少“患者”的辐射剂量,术后采用扫描件匹配评估误差。目前研究结论证明口腔扫描仪能能够获得非常精确的结果,但是在临床运用上,扫描软件,扫描方式,甚至是扫描的部位对扫描结果不同程度的影响[17]。由于本实验模型在口外扫描,不仅能避免唾液和口腔雾气的影响,而且具有更好的光线和操作空间,能获得更高的精确度和真实值[18]。整个实验过程采用相同的扫描方法采集数据,一定程度上减少了STL数据的误差。虽然本实验扫描杆(Mono-Scanbody,straumann)的材料是热塑高分子材料聚醚醚酮,具有可消毒、重复利用、不易形变、表面不反光等优点[17-18],但重复使用的扫描杆以及不同的扫描杆之间可能存在细微的差别,这会导致扫描杆对齐时有不同的误差。
为了手术安全,机械臂通常不能快速移动,实验虽然采用标准口腔模型,但是没考虑实际运用的张口度以及患者的舒适度,这意味着在实际运用过程中,需要谨慎选择种植机器人的适应症。此外,由于研究过程是单颌一次性完成,回顾数据,发现最大的根尖偏差值是26(上颌最后植入),高达2.21 mm,这可能是前期种植手术导致肉眼无法识别的marker移动,因此提醒临床医师在单颌多颗牙的种植手术时,及时关注marker的位置,适当采用标定探针验证导航追踪精确度,必要时可再次行注册和校准,确保种植位点的准确性。对于经验匮乏的医师慎重选择复杂病例,因为任何技术都存在学习曲线,但实验缺乏追踪前期与后期实验的精度误差,往后需要更系统的研究探索种植机器人运用的学习曲线。此外,由于本次实验采用数量有限的树脂模型材料,导致无法模拟人体颌骨的位点异质性,无法模拟人体的口腔环境,因此需要更多样本量的临床研究探索机器人的精确性和进一步分析误差的来源。
4 结 论
有限的实验数据证明,全程植入的自主式种植机器人可以获得非常精确的种植效果。无论是上颌还是下颌,前牙区还是后牙区,均无明显差异。在前牙区即刻种植位点,虽然种植机器人会出现误差,但是植入结果仍处于临床可接受的误差范围。
猜你喜欢
口腔医学(2021年10期)2021-12-02
冶金设备(2021年1期)2021-06-09
海南医学(2016年8期)2016-06-08
中国卫生标准管理(2015年25期)2016-01-14
中国医疗美容(2015年1期)2015-07-12
中国医疗美容(2015年1期)2015-07-12
医学研究杂志(2015年12期)2015-06-10
江苏大学学报(医学版)(2015年5期)2015-04-16
现代冶金(2015年4期)2015-02-06
山东冶金(2014年4期)2014-02-09