模型预测控制的应用研究
2023-08-01 17:56:01王俊伟石博轩孙钰樟杨益宽
化工自动化及仪表 2023年2期
王俊伟 石博轩 孙钰樟 杨益宽

摘 要 针对双容水箱液位控制系统单输入、单输出、时变、非线性、耦合和滞后的特征,以双容水箱液位为被控对象,设计基于状态方程模型的MPC预测控制器,对水箱液位进行控制。仿真结果表明:该控制器可以满足模型多输入、多输出、精确控制、抗干扰、耦合和非线性特征的控制需求,比传统PID控制器有更明显的优势。
关键词 MPC预测控制器 双容水箱 液位控制 非线性 耦合
中图分类号 TP18 文献标识码 A 文章编号 1000?3932(2023)02?0165?05
双容水箱液位控制系统在化工、电力、食品等领域应用广泛。水箱液位的精确控制至关重
要[1,2],如锅炉液位控制系统中,锅炉液位过低会发生干烧现象,严重时甚至会导致生产事故;而水位过高,又会使得锅炉内的压力过大,导致发生爆炸等事故,因此,必须对水箱液位进行精确控制。
实验室对双容水箱液位的控制一般采用传统PID控制系统实现,当PID参数最佳时,可以使液位保持在稳定值。但是由于PID参数在工程中是采用手动试凑的方法进行调节的,这样就导致液位恒值控制有一定偏差。因此,在实验室PID控制系统的基础上,有学者将先进控制算法,如PID调优[3,4]、模糊PID控制[5,6]、滑模PID控制[7]等应用到水箱液位控制中,实现了液位的精确控制。
针对双容水箱液位控制模型的非线性、耦合和滞后特征,笔者首先介绍双容水箱液位系统,并对其进行数学建模,得到传递函数和状态方程;之后,基于传递函数模型和状态方程分别设计PID控制器和MPC预测控制器,并应用到水箱液位控制中;最后,对水箱液位控制的MPC预测控制器和PID控制器进行仿真对比实验。
1 双容水箱简介
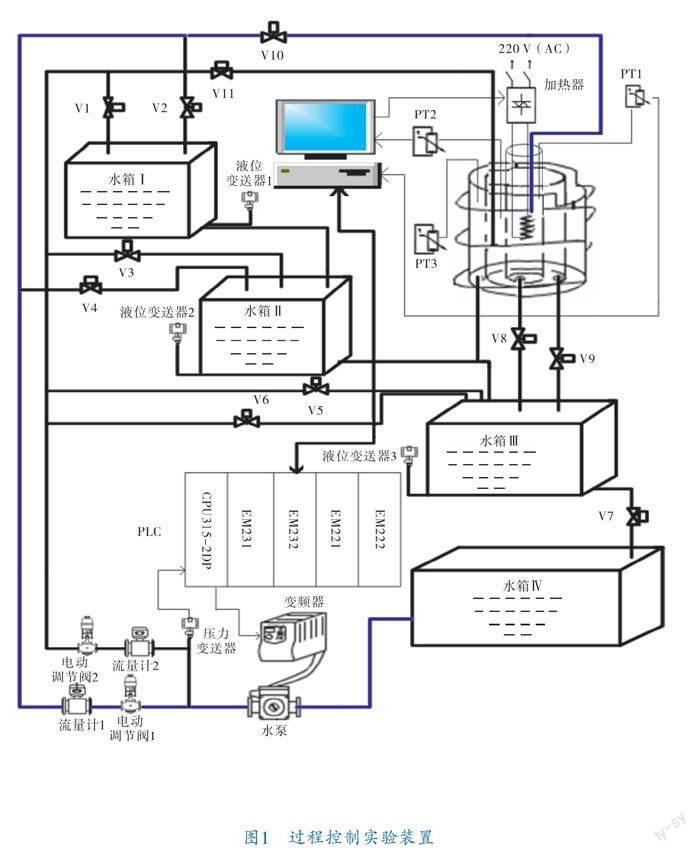
本研究采用的天煌教仪THJDS?3型过程控制实验平台如图1所示,该平台可以实现温度、压力、流量和液位模拟量的应用和仿真实验。现场部分包括执行器手动阀、电动调节阀和电磁阀。变送部分包括压力变送器、液位计和流量计。控制器采用S7?300 PLC,可以实现Profibus?DP通信,与该控制器配套的模块有电源模块、模拟量输入输出模块、数字量输入输出模块和远程I/O ET200。实验装置包括4个水箱,其中水箱Ⅳ用于存储水。温度部分包括加热桶的内筒和外筒。上位机软件采用STEP7、WinCC、和利时DCS和智能控制仪表实现。设计水箱Ⅰ、水箱Ⅱ、水箱Ⅲ的目的是进行双容水箱液位的控制实验。
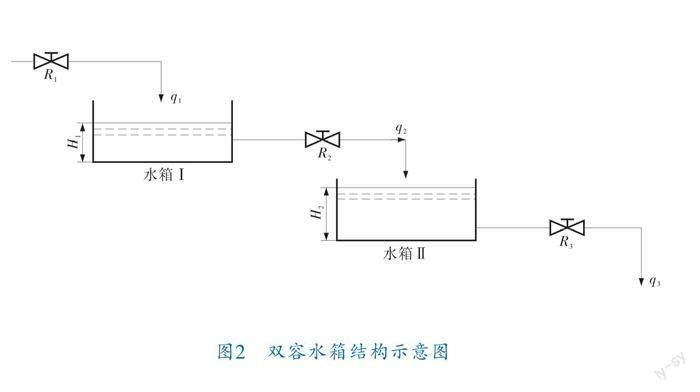
双容水箱的结构如图2所示,包括电动调节阀、电磁流量计、磁翻板液位计、压力变送器、上/下水箱、电磁阀及抽水泵等。其中,R、R、R表示管道1~3的液阻,q、q、q分别表示水箱Ⅰ流入、水箱Ⅱ流入和水箱Ⅱ流出流量,H和H分别表示水箱Ⅰ和水箱Ⅱ的液位高度。
2 双容水箱模型
在实验中,要求图2中所示的下容水箱液位恒定。
现进行双容水箱液位传递函数和状态方程建模。
预测控制的核心思想是使代价函数取最小值,使付出最小代价从而实现最优控制。
4 控制系统仿真
根据模型(12)、(13)和(16)设计双容水箱液位预测控制系统,并对控制系统进行MATLAB仿真,仿真结果如图3~5所示。其中,情况1中,Q=[1,0;0,1],R=0.5,F=[4,0;0,4];情况2中,Q=[0.5,0;0,0.5],R=10,F=[0.8,0;0,0.8];情况3中,Q=[0.1,0;0,0.1],R=5,F=[0.1,0;0,0.1]。
可以看出,矩阵Q、R和F选择的参数不同,最终系统的稳定性不同,当参数选择不合适,如情况
3出现了系统状态液位不稳定的情况,且液位变化率有较大的稳态误差,但能耗较小。因此,当上述权值矩阵值选择不合适时会导致系统不稳定,权值的正确选择关系到系统的稳定性和能耗大小。
5 结束语
通过建立双容水箱数学模型的状态方程,设计了基于水箱液位控制的预测控制器。仿真结果表明,情况1和情况2的液位和液位变化率是稳定的,但是能耗较大,情况3出现不稳定但是能耗较小,因此当权值矩阵选择得不合适,稳定性和能耗大小也会不同,当权值矩阵选择得合适时便可获得既稳定能耗又尽量小的理想控制结果。
参 考 文 献
[1] 周依涛,郑炜炀,项思哲,等.基于滑模控制的双容水箱液位系统设计[J].国外电子测量技术,2021,40(6):54-58.
[2] 孙明革,张嘉诚.基于LabVIEW的双容水箱液位控制系统研究[J].科学技术创新,2021(17):184-185.
[3] 孙悦,恒庆海.基于DCS的双容水箱液位控制系统仿真[J].计算机仿真,2020,37(12):219-223.
[4] 李磊,李俊红,顾菊平,等.双容水箱基于QPSO算法的PID控制研究[J].控制工程,2021,28(8):1553-1558.
[5] 李大字,李國强,张建青.双容水箱液位自抗扰控制系统稳定性分析及实验教学设计[J].实验技术与管理,2021,38(7):63-66;72.
[6] 李晖,邢振登.一种基于相轨迹特征的云模型控制器设计[J].控制工程,2020(9):1489-1494.
[7] MENG X X,YU H S,ZHANG J,et al.Disturbance observer?based feedback linearization control for a quadruple?tank liquid level system[J].ISA Transactions,2022,122(4):146-162.
(收稿日期:2022-06-09,修回日期:2023-02-22)
Research on Application of Model Prediction Control
WANG Jun?wei, SHI Bo?xuan, SUN Yu?zhang, YANG Yi?kuan
(College of Mechanical and Electrical Engineering, Hetao University)
Abstract Aiming at characteristics of single input and output, time?varying, nonlinearity, coupling and hysteresis, the level of double?tank system was taken as the controlled object; and considering the models nonlinearity, coupling and hysteresis, a state equation model?based MPC was designed for the tank level. Simulation results show that, compared to the traditional PID controller, this controller can satisfy the control operation like multi?input and output, accuracy control, anti?interference, coupling and nonlinearity.
Key words MPC controller, double tank sysem, level control, nonlinearity, coupling
基金項目:内蒙古自治区高等学校科学研究项目(NJZY22248);内蒙古自治区自治区级大学生创新他业训练计划项目(202111631015,202111631016)。
作者简介:王俊伟(1985-),讲师,从事非线性控制、最优控制等方面的教学与科研工作,709468941@qq.com。
引用本文:王俊伟,石博轩,孙钰樟,等.模型预测控制的应用研究[J].化工自动化及仪表,2023,50(2):165-169.
猜你喜欢
数学物理学报(2022年2期)2022-04-26 14:08:28
汽车科技(2016年5期)2016-11-14 08:03:52
科技视界(2016年23期)2016-11-04 08:14:28
现代经济信息(2016年21期)2016-10-25 13:22:39
科学与财富(2016年28期)2016-10-14 00:06:31
科技视界(2016年24期)2016-10-11 12:53:13
中国市场(2016年29期)2016-07-19 04:01:57
西南交通大学学报(2016年4期)2016-06-15 20:29:37
中国环境科学(2016年3期)2016-02-08 15:07:14
大型铸锻件(2015年5期)2015-12-16 11:43:20