基于直觉模糊TOPSIS 的无人战车多目标动态威胁评估*
2023-07-31 11:39朱学耕王作根
火力与指挥控制 2023年6期
朱学耕,钟 振,潘 亮,王作根
(1.陆军装甲兵学院蚌埠校区战术系,安徽 蚌埠 233000;2.驻南阳地区第二军事代表室,河南 南阳 473000)
0 引言
无人作战平台是未来智能化作战中的重要力量,对战争的胜负发挥举足轻重的作用。近年来,在叙利亚战场上俄罗斯将“天王星9”无人战车应用在巷战中,检验了其作战能力[1];在亚阿冲突中,阿塞拜疆的无人机摧毁亚美尼亚多辆地面装备和有生力量,大放异彩[2];在俄乌冲突中,乌克兰运用无人机成功摧毁俄罗斯坦克和装甲车辆,使其作战效能难以发挥[3]。这些实战表明,无人平台正在逐渐改变未来战争形态。
我国无人平台已在陆、海、空领域稳步发展,部分装备已经投入实战[4-6]。无人战车作为陆上作战的主要突击力量,为适应未来作战特点,需要具备完全自主作战能力。在自主作战中,准确进行战场目标威胁评估对其快速消灭敌人,保存自己具有重要意义。
目前,由于无人战车的应用较少,对其战场目标威胁评估研究的文献也较少。文献[7]利用动态贝叶斯网格方法对无人战车战场目标威胁进行评估,但是利用该方法需要获得大量的实战数据作为计算样本,目前还比较困难。针对这一问题,本文在模糊理论的基础上,通过建立目标威胁评估指标体系,结合TOPSIS(technique for order preference by similarity to an ideal solution)法特点,利用较少的数据对无人战车战场目标进行动态威胁评估。
1 威胁评估指标的确定及量化
无人战车在地面作战中,面对的战场环境复杂多变,对目标的威胁评估不仅要考虑目标在时间、空间的状态,还需要结合战场环境本身的特点等。对于时间维度,文中主要考虑不同类型目标在多个时刻的状态,将其各个时刻的状态进行融合,最终得到目标的动态威胁程度。对于空间状态,主要考虑无人战车与战场目标的位置关系,主要从攻击角度、相对速度和相对距离3 个角度进行描述。对于战场环境,主要考虑对地形环境的影响。因此,在建立目标威胁评估体系的过程中,主要考虑攻击角度、目标类型、地理环境、相对速度和相对距离5 个因素。
1.1 攻击角度因子
攻击角度是无人战车与敌目标射向之间的夹角,在这里定义攻击角度θ 在-90°~90°之间存在威胁,θ 不在此区间时可以认为无威胁。当θ 越小表示目标的攻击意图越明显,对无人战车的威胁越大,反之越小。因此,定义攻击角度威胁因子的威胁函数为:
其变化曲线如图1 所示。

图1 攻击角度因子变化曲线Fig.1 Variation curve of attack angle factors
1.2 目标类型因子
目前,无人战车的应用还未普及,战场上主要是有人战车和无人战车并存,以M 军为主要研究对手,无人战车在地面作战中主要面临的敌目标主要有坦克X1、步战车X2、无人战车X3、火箭筒X4等,根据其武器装备的战技术性能及所携带的弹药,在其有效打击范围内,可以认为其威胁程度为:坦克>步战车>无人战车>火箭筒。因此,可以将目标类型因素对威胁程度影响定义为:
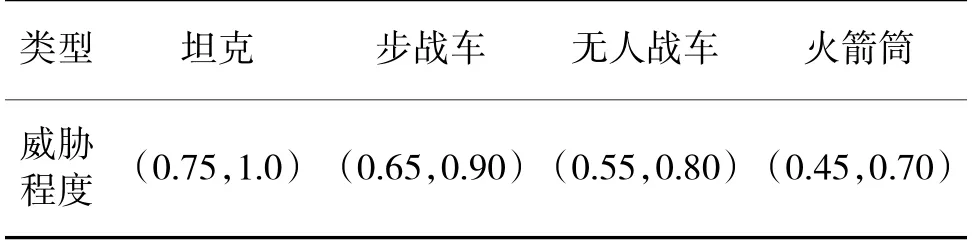
表1 目标类型因子变化范围Table 1 Variation range of target type factors
1.3 地形环境因子
在地面作战中,无人平台会遇到各种各样的地形,根据地形的特点可以将其概括为掩蔽地地形和遮蔽地地形。地形种类不同,会使目标的威胁程度发生相应的变化,文中将遮蔽地地形和掩蔽地地形条件对目标威胁的影响分为9 个等级,其具体划分如下页表2 所示。

表2 地形环境因子对应的直觉模糊数Table 2 The relative intutitionistic fuzzy numbers of terrain environment factors
1.4 相对速度因子
在一定相对速度范围内,装备的命中率相对比较稳定,但是当速度越大,武器装备的命中率会发生一定的变化,进而影响其威胁程度。参考进攻作战中我方的平均开进速度以及作战中复杂战场环境影响,取敌我相对速度的区间为v∊[0,30],将相对速度影响因子的函数定义如下:
其变化曲线,如图2 所示。

图2 相对速度因子变化曲线Fig.2 The variation curve of the relative velocity factors
1.5 相对距离因子
无人战车与敌目标相对距离会影响打击效果,当相对距离大于目标的有效射程时,目标此时无法对无人平台进行射击,则无威胁;相对距离小于目标的有效射程时,可以用命中率大小表示其威胁程度,其威胁程度可以用直觉模糊数表示,其隶属度和非隶属度函数如下所示:
2 威胁评估指标权重确定
评估指标权重的确定是整个目标威胁评估的重要环节。目前获取评估指标权重主要从主观权重、客观权重和主客观组合权重3 个角度进行确定,为了避免人为主观因素影响和客观数据难以反映指标真实特性等不足,文中主要从组合权重的角度进行评估。
2.1 主观权重
利用直觉模糊层次分析法确定目标的主观权重[8]。首先建立直觉模糊互补判断矩阵;其次,对直觉模糊互补判断矩阵进行一致性检验;最后,确定直觉模糊判断矩阵权重。
2.2 客观权重
在考虑直觉模糊数的隶属度、非隶属度和犹豫度信息的基础上,确定直觉模糊熵,使其包含的信息更加完整,能够有效地区分评估指标特性[9]。
2.3 综合权重
利用相对熵来描述不同赋权方法所得权重向量的距离程度,当权重向量与主观权重、客观权重向量的距离最小时为最优权重[10]。
对于一个有m 个参数指标的被评估系统,主客观权重向量分别为σ、ζ,它们的权重分配系数为a和b,ω 为组合权重向量,根据相对熵的思想建立求解组合权重的数学模型:
3 运用直觉模糊TOPSIS 法获得目标动态威胁度
Step 1:确定时间权重η
在作战中,不同时刻目标状态是不同的,不同的状态其威胁程度也是不一样的,无人平台对目标威胁的判断,不能仅以目标某一时刻的状态,应当从发展的、动态的角度去综合考虑,只有这样才能更加客观地反映其威胁程度。由于在作战中,越接近当前时刻,目标状态对其威胁程度的影响就越大,因此,文中主要采用泊松分布法逆形式计算时
Step 2:转换评估语言
文中对评估指标的量化,主要是精确数和直觉模糊数,为了便于不同评估语言之间建立相互联系以及更加准确地描述评估指标的特性,需要将不同形式的评估语言进行统一,文中将实数型指标信息转换为直觉模糊数,下面给出精确数转化为直觉模糊数隶属度和非隶属度的计算公式。
1)效益型指标
2)成本型指标
Step 4:计算目标集tk时刻的加权直觉模糊决策矩阵
Step 5:计算目标集tk时刻的加权直觉模糊矩阵的正负理想解。
正理想解:
针对效益型指标:
针对成本型指标:
负理想解:
针对效益型指标:
针对成本型指标:
Step 6:计算目标集tk时刻,目标Xi到正、负理想解和的欧式距离、[11]。
Step 7:计算目标集tk时刻目标Xi与正理想解的相对贴近度
目标tk时刻与正理想解的相对贴近度即表示各目标在tk时刻的威胁度。
Step 8:构造加权动态决策矩阵H
Step 9:利用TOPSIS 法获得目标威胁度Zi,根据其大小获得目标动态威胁排序。
4 仿真分析
无人战车在上级的编成内沿街道向市政大楼进攻,当行进至下页图3 中所示位置时,接上级情报信号得知,在连续的t1、t2、t3时刻,1 号楼附近蓝军步兵携带火箭筒,2 号楼北侧有敌无人战车1 辆,3号楼北侧有敌坦克1 辆,4 号楼附近有步兵战车1辆。目标的战技术性能如下页表3 所示,其各时刻目标对应的状态如表4 所示。
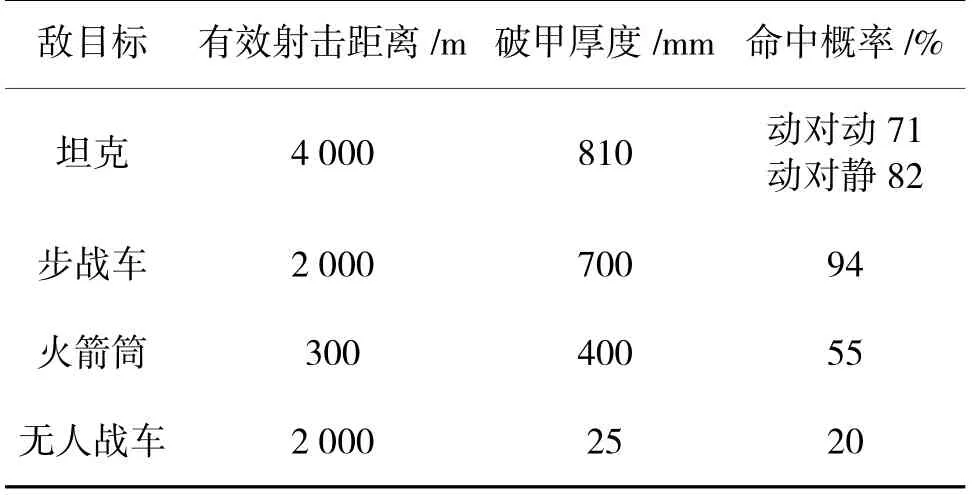
表3 敌目标战技术性能Table 3 Tactical and technical performance of enemy targets
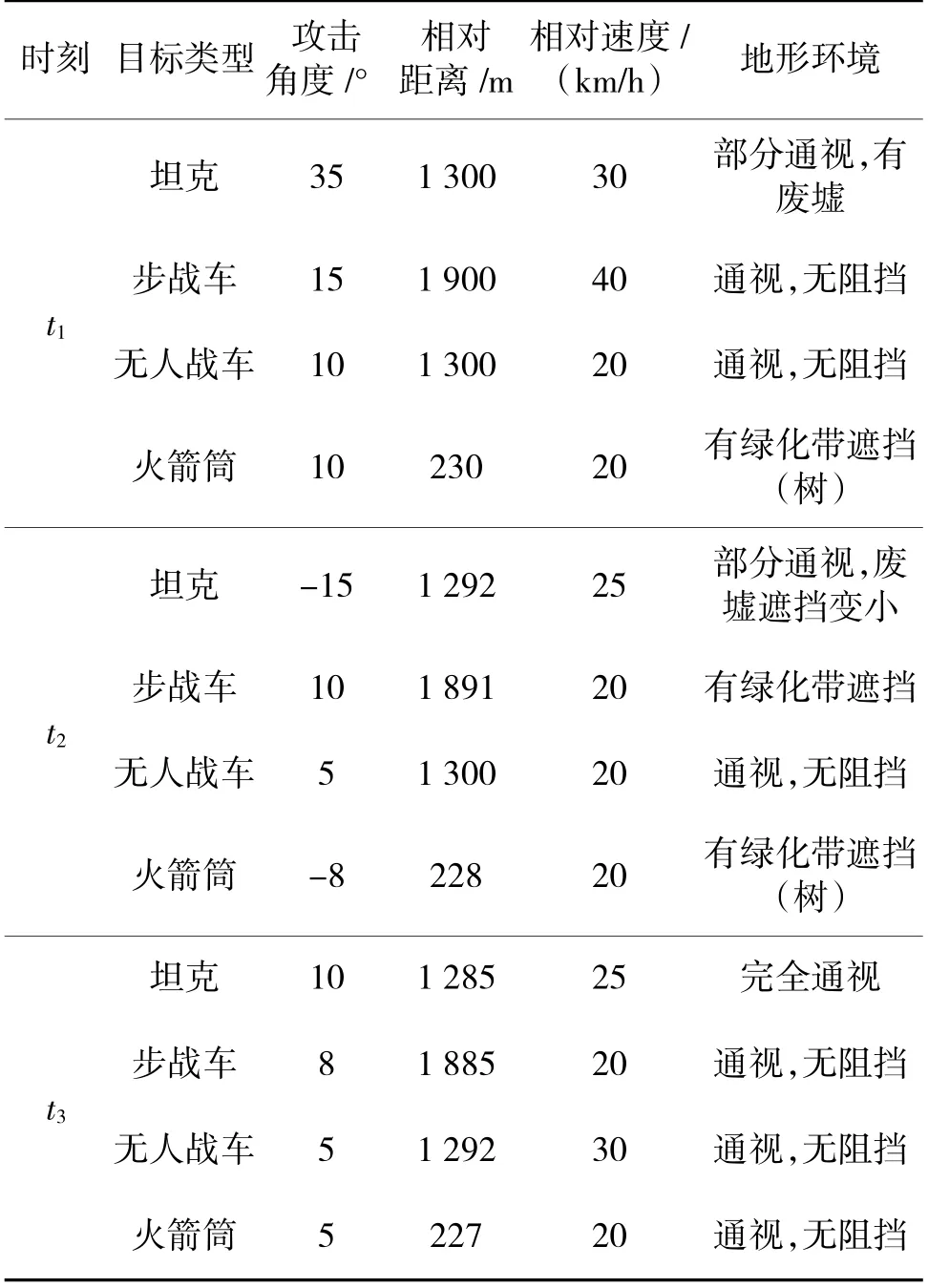
表4 各时刻目标信息Table 4 Target information at each moment

图3 战场态势示意图Fig.3 Schematic diagram of battlefield situation
4.1 威胁评估仿真
综合考虑预设的战场情况,对于式(6)、式(7)取κ=0.8。根据表4、评估指标量化公式和评估语言之间的转化关系,得到各时刻直觉模糊决策矩阵如表5 所示。

表5 各时刻直觉模糊决策矩阵Table 5 Intuitionistic fuzzy decion-making matrix at each moment
根据文献[8]得到评估指标直觉模糊互补判断矩阵为:
根据直觉模糊判断矩阵A 和表5 的各时刻直觉模糊决策矩阵可以得到评估指标的主观权重、各时刻的客观权重及组合权重分布如表6 所示。
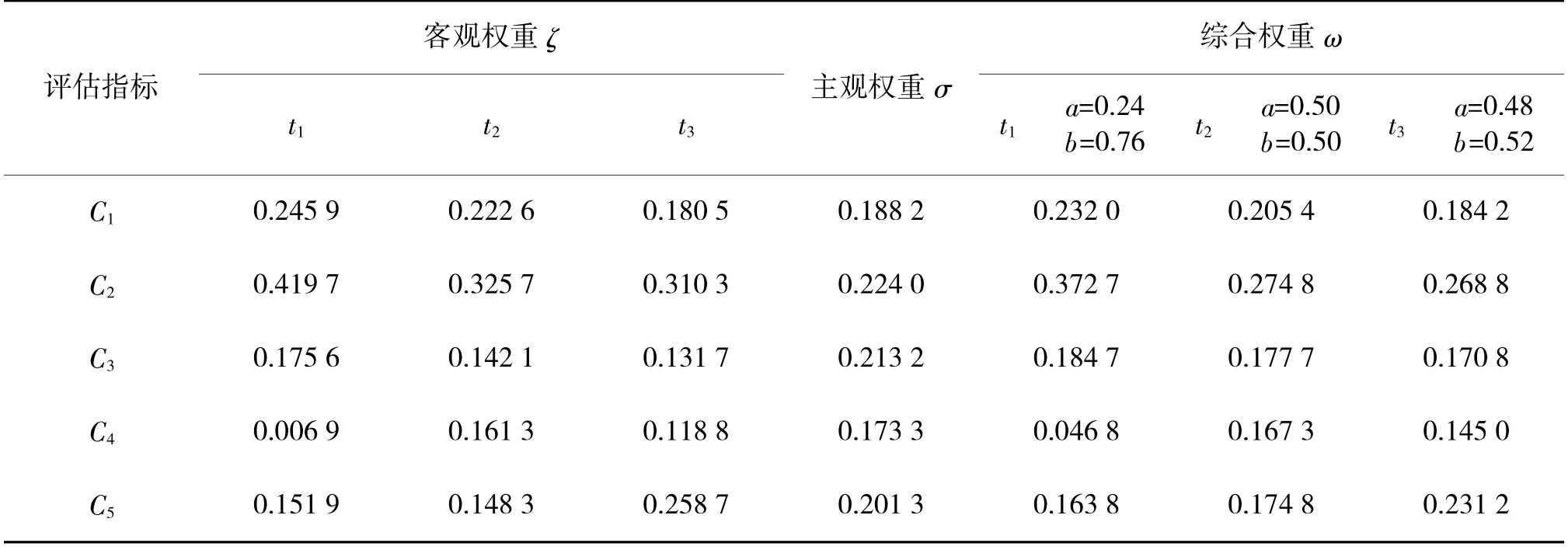
表6 评估指标权重分布Table 6 Weight distribution of evaluation index
1)利用TOPSIS 法得到各时刻利用主观权重、客观权重和组合权重得到的目标静态威胁排序,如表7 所示。
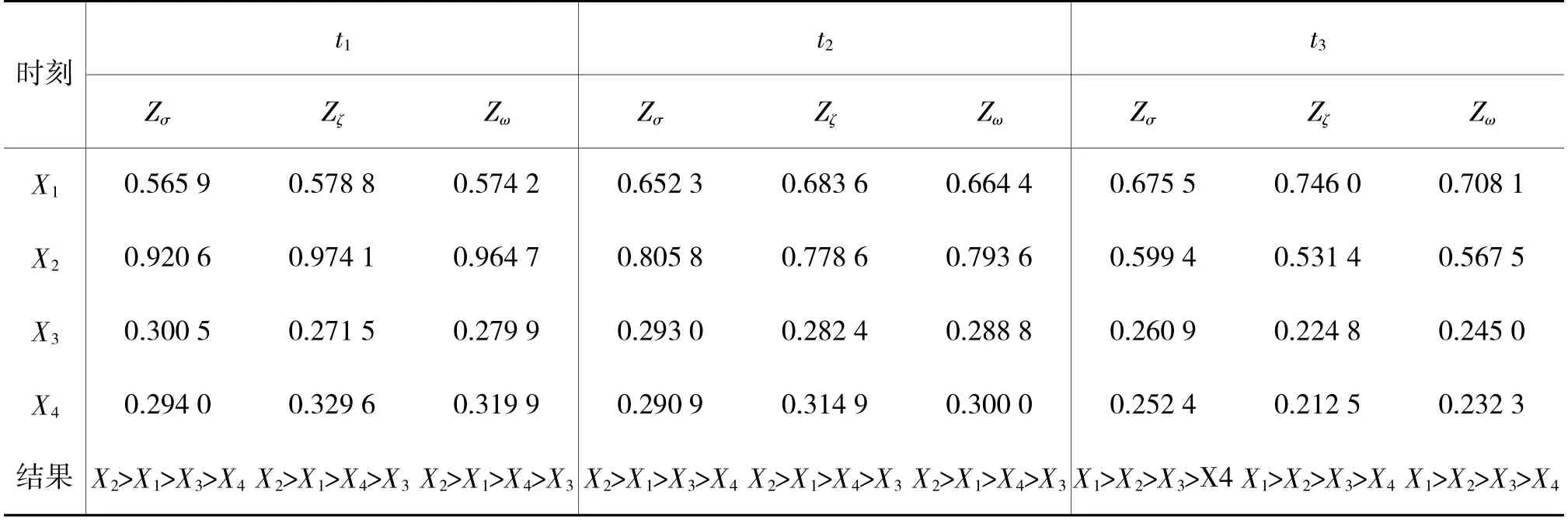
表7 各时刻目标威胁评估结果对比Table 7 Comparison of target threat assessment results at each moment
2)令φ=1.5,利用泊松分布逆形式得到各时刻权重信息为:。结合单时刻利用组合权重得到的目标相对贴近度,构造加权动态决策矩阵H。
4.2 结果分析
1)单一权重与组合权重威胁评估结果对比
根据表7 的结果,在t1、t2、t3时刻,根据主观权重、客观权重和综合权重得到的目标威胁评估结果各不相同。以t1时刻为例,利用主观权重得到的评估结果是:X2>X1>X3>X4,利用客观权重得到的评估结果是:X2>X1>X4>X3,利用综合权重得到的结果是:X2>X1>X4>X3。从评估结果看,利用不同的权重信息所得威胁评估结果不同。这主要是由于利用单一方法获得的主客观权重不能够完整反映评估指标信息,使其评估结果具有一定的主客观偏好,虽然利用综合权重获得评估结果与利用客观权重获得的评估结果一致,但是前者包含的评估信息更加完整,融合主客观特性获得的威胁评估结果更加合理。
2)静态威胁评估结果与动态威胁评估结果对比
根据表7 的结果,t1和t2时刻,利用组合权重得到的目标威胁排序结果相同均为X2>X1>X4>X3,但时刻评估结果为X1>X2>X4>X3,与t1、t2时刻不一致。这主要是由于不同时刻,目标的状态发生了变化,目标状态不同,其威胁程度也会发生变化,这说明为了更好地反映一段时间内目标的威胁程度,对其进行动态威胁评估则显得尤为重要。
融合各时刻目标信息得到目标动态威胁评估结果为:X2>X1>X4>X3,与各时刻静态威胁评估结果对比可以看出:虽然t3时刻目标状态更加接近其最后状态,但是从整个t1~t3时间段来看,t3时刻的评估结果与目标信息融合后的评估结果不同,而t1和t2时刻的评估结果与融合后的评估结果相同。这主要是因为,多时刻目标信息融合后的评估结果,综合考虑了目标各时刻的战场信息,对各时刻的目标信息进行了有机融合,而不是简单信息叠加,融合后的动态评估结果包含了目标在不同时刻下不同状态之间的联系,能够合理地反映出这一时间段内目标的整体状态。将本方法与利用文献[12]中的方法所得的结果进行对比,利用文献[12]中的方法,当决策者风险偏好系数为0.5 时,得到目标威胁度为:Z=(0.763 5,0.775 4,0.018 9,0.024 2),其评估结果为:X2>X1>X4>X3。与利用文中方法所得结果一致,验证了该方法的正确性。
对于t2时刻,改变坦克的状态信息,使其攻击角度变为-10°,其他信息不变,可以得到在该时刻的目标威胁排序仍为X2>X1>X4>X3。但是综合t1、t2、t3时刻的信息,目标威胁排序发生了变化,其动态威胁结果为X1>X2>X3>X4。可以看到,坦克的攻击角度变小,说明其攻击意图增强,但是单时刻的威胁评估结果却没有发生变化,而融合多时刻目标威胁信息进行评估时,得到的威胁评估结果发生了变化,进一步验证了动态评估的合理性。
5 结论
大部分无人战车目前还处于研发定型阶段,因此,其在演训和实战中的数据较少,利用动态贝叶斯网格法对其战场目标威胁进行评估时缺乏必要的数据支撑。本文根据较少的战场数据信息,从时间、空间和战场环境3 个维度建立无人战车战场目标威胁评估指标,利用精确数和直觉模糊数描述评估指标信息,并明确精确数与直觉模糊数之间的转换关系;采用基于最小信息熵的组合赋权法对威胁评估指标进行赋权;选取连续的多个时刻的目标战场信息,采用基于泊松分布法确定各时刻分布权重,以区别每个时刻目标信息的重要程度;根据时间分布权重建立动态加权直觉模糊决策矩阵,利用TOPSIS 方法对无人战车多目标动态威胁进行评估。该方法利用直觉模糊数作为目标威胁评价语言,包含的目标评价信息完整,利用综合权重降低评估结果的片面性,不仅能够反映单时刻的目标威胁信息,还能够对多时刻目标威胁信息进行融合,准确反映无人战车动态战场态势,使战场多目标威胁评估更加合理。
猜你喜欢
军事文摘(2022年17期)2022-09-24
小哥白尼(军事科学)(2022年4期)2022-07-08
河北理科教学研究(2021年3期)2022-01-18
海峡姐妹(2020年7期)2020-08-13
小哥白尼(军事科学)(2020年7期)2020-05-22
新世纪智能(数学备考)(2020年12期)2020-03-29
小哥白尼(军事科学)(2019年2期)2019-04-17
小哥白尼·趣味科学画报(2019年12期)2019-02-28
军营文化天地(2017年11期)2017-12-08
岷峨诗稿(2017年4期)2017-04-20