
建筑设施巡检机器人自主导航算法与应用研究
2023-07-27 06:57:18孔琳洁
科技风 2023年20期
关键词:算法


摘 要:建筑设施巡检机器人,作为一种在建筑领域应用的智能移动机器人,旨在代替人工日常巡检,实现无人化。移动机器人要实现自主导航,需具备实时获得自身运动状态和感知周围动态环境,并在复杂环境中自主定位、规划、移动的能力。本文对常见的自主导航算法和系统进行了分析与研究,总结存在的问题。
关键词:建筑设施巡检机器人;自主导航;算法
中图分类号:TU689 文献标识码:A
Research on Autonomous Navigation Algorithm
and Application of Building Facility Inspection Robot
Kong Linjie
Zhejiang college of construction ZhejiangHangzhou 311231
Abstract:The construction facility inspection robot,as an intelligent mobile robot applied in the construction field,aims to replace the manual daily inspection and realize unmanned system.To achieve autonomous navigation,mobile robots need to be able to obtain their own motion state in real time,perceive the surrounding dynamic environment,and independently locate,plan,and move in complex environments.This paper analyzes and studies the common autonomous navigation algorithms and systems,and summarizes the existing problems.
Keywords:construction inspection robot;autonomous navigation;algorithm
建筑设施巡检机器人所涉及的智能移动机器人相关各类技术吸引了各国研究者的深入研究。在这些研究中,移动机器人导航技术成为广受关注的热点问题之一。移动机器人需要自主回答三个哲学问题,即“我在哪儿”“我要去哪儿”“我怎么去”。移动机器人所处的环境是动态变化的,因此需要实时感知周围的环境和自身的运动状态。移动机器人只有准确地感知周围环境信息,实时进行面向目标点的最优避障轨迹规划并准确地跟踪,才能安全地完成导航任务。因此,在复杂动态环境中的机器人轨迹规划和跟踪控制是具有现实意义的重要课题[12]。
目前,在移动机器人、无人驾驶和无人机等领域,包含全局路径规划和局部轨迹规划的导航算法已得到广泛应用[3]。路径规划是指找到一条连接起点和目标点的最优路径,最优指标往往是路径最短。为保证机器人运动的平稳性,路径必须是光滑的。轨迹规划是在路径规划的基础上加入时间序列信息,也就是说需要确定机器人每时每刻以多大的速度、什么方向通过路径上的每一个点。
1 路径规划算法
1.1 环境模型
现有地图表示方法主要可以分为栅格地图、四叉树地图、可视图和Voronoi图等[1]。在栅格地图中,根据地图分辨率将整个空间分割成大小相同的栅格。栅格状态包括占据、空闲或者未知。栅格尺寸通常根据场景大小和导航任务的精度来综合确定。栅格图有两个明显的缺点,一方面,地图的尺寸随环境规模的增大而增大;另一方面,地图分辨率难以确定,过低则导致精度低,过高则导致计算量大。四叉树地图是在均匀栅格地图的基础上,将环境不断划分为四个栅格,栅格尺寸不断减小直到达到精度要求,最终获得地图稀疏且结构化的表示,与栅格图相比,其缺点是不能直接索引。Voronoi图由与最近的两个障碍物距离相等的点集构成,基于Voronoi图规划的路径较长,偏离障碍物较远,即更加侧重安全性。可视图将起点和障碍物、终点和障碍物的各个顶点之间连线,当环境中障碍物的顶点数量过多,会导致其建模及路径规划效率低下。
1.2 路径搜索
路径搜索是在事先建立的地图上使用路径寻优算法根据一定的性能指标,搜索从起始点到目标点的最优路径。目前主要包括基于图搜索的规划算法和基于随机采样的规划算法。常用的图搜索算法包括深度优先搜索、广度优先搜索、Dijkstra算法和A*算法等,其中A*通过启发式搜索策略提高了搜索效率,得到了广泛应用。在基本A*算法的基础上,众多学者进行了改进研究。随机采样法在20世纪90年代应用于路径规划中,主要包括快速扩展随机树算法(RRT)和概率路图算法(PRM)。这类方法需要在已知的地图上不断地建立和更新无向图,优点是在大场景环境中规划的效率比较高。RRT和PRM的主要区别在于,RRT从起点或目标点出发,无向图像树一样生长,而PRM是在地图上随机采样,计算点之间的连通性构造出整个无向图。RRT和PRM算法都是概率完备的,即只要路径存在,且规划时间足够长,就一定能找到最优路径。但是在实际应用中无法满足“规划时间足够长”这一前提条件,找到的可行解往往不是最优解。瑕不掩瑜,它們可以在复杂环境中快速找到一个可行解,因此具有实际应用价值。上述路径搜索方法得到的一般都是折线路径,通过曲线插值即可获得平滑路径。曲线插值被定义为根据已知的参考路径点集构造和插入一个新的路径点集合的过程,即生成更加平滑的路径。不同的曲线插值算法采用不同的路径平滑与曲线生成技术,常见的有回旋、多项式、贝塞尔、样条曲线等。
2 轨迹规划算法(避障)
与全局路径规划不同的是,局部轨迹规划利用传感器获得的局部环境信息在线实时地调整轨迹。轨迹优化算法通常试图最小化控制代价、控制误差或者起始点到目标点的运行时间,然而获得最优轨迹的计算代价较大,限制了在线实时轨迹规划加跟踪控制这一方案的使用。因此很多学者都专注于研究如何高效地获得最优轨迹或者近似最优轨迹。
2.1 滚动窗口法
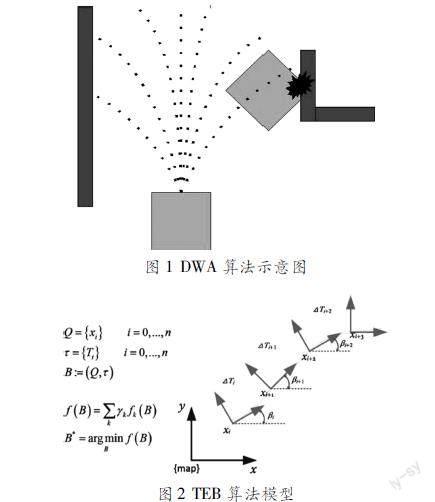
滚动窗口法(DWA)是一种广泛使用的机器人轨迹规划方法[4],已知机器人当前的运动状态,在受到速度约束的搜索空间中采样多组速度,并生成这些速度在给定时间内的运动轨迹,如图1所示。在速度空间中找到一组安全且最优的速度作为控制指令下发至电机。代价函数包含与目标点的距离、向前的速度大小、与障碍物的距离。为了避免计算量过大,DWA将搜索空间限制为所有候选解的一个子集,因此无法保证获得最优解;另一方面,由于直接在速度空间内进行采样,易导致运动不平稳。
动态窗口方法(DWA)是一种广泛应用的移动机器人导航方法[5]。从受一组可行速度限制的速度搜索空间中重复采样模拟轨迹,成本函数选择成本最低的解决方案来控制机器人。该方法通过将有效轨迹的可行集合限制为采样候选子集来说明效率,采样候选子集具有仅导致次优轨迹的恒定速度段。
2.2 时间弹性带法
Roesmann等人在弹性带方法的基础上提出时间弹性带法(TEB)[5],考虑非完整运动学、动力学等约束,将时间信息加入路径中,高效地优化机器人局部轨迹,如图2所示。但是,为了提高效率TEB将硬约束转换为软约束,出现动态障碍物时可能会陷入局部最优。
3 自主导航系统
自主导航系统从不同角度得到了大量的研究,这里主要介绍ROS机器人导航包(Navigation)、Apollo无人驾驶系统、Autoware无人驾驶系统和卡耐基梅隆大学机器人研究所的自主探索开发环境(Autonomous Exploration Development Environment)。
3.1 ROS导航包
Navigation是一种入门级ROS移动机器人导航解决方案,该堆栈由包组成,包括状态估计和规划模块,用于二维已知/未知环境中进行导航。PR2机器人,如图3所示,采用Navigation实现移动功能。在负责路径规划的move_base中主要包含全局路径规划和局部路径规划。全局路径规划通过Dijkstra或A*路径搜索算法,计算最小代价路径,作为机器人的全局路线。局部路径规划根据附近的障碍物进行避障路线规划。
3.2 Apollo系统
Apollo由百度发布,是一个向汽车行业及自动驾驶领域合作伙伴提供的软件平台。Apollo的软件架构主要包含了感知、定位、预测、高精地图、规划、控制等模块。规划模块处于算法模块的中间层,定位、感知、预测、路由模块是规划的上游,控制模块是规划的下游。根据无人驾驶汽车的感知、预测模块输出的信息,汽车当前的运动状态和道路情况,规划模块实时地规划出一条平滑、安全的局部轨迹。控制模块通过调整油门、刹车和方向盘,控制汽车跟踪该局部轨迹,保证车辆平稳、安全地运动。需要说明的是,局部轨迹是车辆在短期内行驶的轨迹,同时包含路径和速度信息。
3.3 Autoware系统
Autoware是名古屋大学开发的一个开源自动驾驶框架,许多研究人员使用它进行自动驾驶的研究和开发。它是一个ROS软件包的集合。开发团队在Tsukuba真实世界机器人挑战赛中测试了Autoware,RWRC是在日本Tsukuba举办的年度移动机器人挑战赛。开发团队使用了基于阿克曼转向机器人,如图4所示,该机器人是一个由计算机控制的老年代步车。安装的传感器主要有一个32线的Velodyne三维激光雷达、三个二维激光雷达。三维激光主要用于定位和动态目标检测,二维激光用于检测车辆附近的障碍物。Autoware的ROS节点主要包括定位、障碍物检测、控制、全局规划、局部规划和路径跟踪等。
规划模块包含一个全局路径规划器和局部轨迹规划器,其中全局规划根据表示道路网络的矢量地图,利用A*算法优化得到最短路径,并将其平滑作为全局参考路径。局部规划是在全局参考路径的基础上,采样一组平滑路径并从中找到一条最优的安全路径。接着根据交通规则和障碍物信息进行速度规划,得到最优轨迹。
3.4 自主探索开发环境
卡耐基梅隆大学机器人研究所的自主探索开发环境(Autonomous Exploration Development Environment)作为一个平台,主要目的是用于开发和测试地面机器人导航的高层级规划算法。开发环境提供了五个环境模型、基本导航模块以及可视化和调试工具。基本系统使用基于自动轮椅的平台,如图5所示,该车配备了Velodyne Puck激光雷达、640×360分辨率的摄像头和基于MEMS的IMU,41GHz i7处理器用于计算。开发环境作为中间层,接收状态估计模块的输出,并向底层的运动控制模块发送指令速度。它通过提供地形图并获取航路点、导航边界和速度,在顶层与高级规划器进行交互,方便用户开发高层级规划算法,无须了解低层级导航模块之间的接口。
结语
综合分析目前建筑设施巡检机器人所涉及的移动机器人全局路径规划和局部避障算法的研究现状,存在的問题可总结归纳为:(1)针对大规模复杂环境,现有全局路径规划效率较低;(2)针对动态环境,现有局部轨迹规划易陷入局部最优,运动不平稳。
参考文献:
[1]张琦.移动机器人的路径规划与定位技术研究[D].哈尔滨工业大学,2014.
[2]吕太之.移动机器人路径规划和地图创建研究[D].南京理工大学,2017.
[3]乔木,于天彪,李明,等.码垛机器人修正正弦函数插值的轨迹规划[J].机械设计与制造,2018(7):130133.
[4]D.Fox,W.Burgard,S.Thrun.The dynamic window approach to collision avoidance[J].IEEE Robotics and Automation Magazine,1997,4(1):2333.
[5]C.Roesmann,F.Hoffmann,T.Bertram.Integrated online trajectory planning and optimization in distinctive topologies[J].Robotics and Autonomous Systems,2017,88:142153.
基金项目:2021年浙江省建设科研项目(2021K132);浙江省高等学校访问学者教师专业发展项目(FX2021158)
作者简介:孔琳洁(1988— ),女,浙江杭州人,讲师,研究方向:智能建造、移动机器人路径规划。
猜你喜欢
成都信息工程大学学报(2019年4期)2019-11-04 00:56:02
阅读与作文(英语初中版)(2019年8期)2019-08-27 03:59:25
小学生学习指导(低年级)(2018年11期)2018-12-03 05:05:00
传感器与微系统(2018年7期)2018-08-29 00:44:48
传感器与微系统(2018年7期)2018-08-29 00:44:46
中学生数理化·高一版(2017年9期)2017-12-19 12:15:15
西安工程大学学报(2016年6期)2017-01-15 14:09:28
现代防御技术(2016年1期)2016-06-01 12:13:27
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:36
电测与仪表(2015年24期)2015-04-09 12:04:20
