一种双臂四轮输电线路巡检机器人的研制
2023-07-27 07:05:44刘爱华罗恩博李浩涛
机械设计与制造 2023年7期
刘爱华,罗恩博,李浩涛,常 勇
(1.中国科学院沈阳自动化研究所,辽宁 沈阳 110016;2.云南电网有限责任公司电力科学研究院,云南 昆明 650217)
1 引言
输电线路是电力系统极为重要的组成部分,为了保证其安全稳定的运行,需要定期进行巡视检查。目前采用的方法主要有人工巡检和直升机巡检。人工巡检的效率低,劳动强度大,危险性高;直升机巡检的费用昂贵,巡检质量易受气候影响。国际上对输电线路巡检机器人技术的研究始于20世纪80年代,日本、美国、加拿大、巴西、泰国等国都对巡检机器人进行了不同程度的研究。国内的研究始于90年代,国内主要研究单位有武汉大学,沈阳自动化所,山东大学等。机器人巡检目前还处于研制阶段,尚未在输电线路巡检实际作业中得到实际应用。根据机器人机构是否具有跨越杆塔障碍物的功能,可将巡检机器人分为一档内巡检机器人和具有越障功能的巡检机器人。文献[1]主要对一档内巡检机器人样机进行了研究,解决了电磁屏蔽、图像传输和数据通讯等问题。文献[4]研制了轮臂复合型巡检机器人,提出质量调节的控制方法。文献[7]研制了光纤复合架空地线(OPGW)巡检机器人,采用搭接弧形臂的方式跨越杆塔。文献[8]开发研制了具有越障功能的Expliner巡检机器人,操作臂与箱体结合实现了质心的快速调节,但是机器人机构尺寸过于庞大。
在国内外各种巡检机器人样机研究的基础上,研制了一种新型的双臂四轮巡检机器人样机,介绍了这种机器人样机的机构构型及结构特点、机器人的控制系统设计,详细分析了机器人跨越防震锤及单挂点悬垂金具的过程,最后在实验室建立了输电线路的模拟环境,对机器人的运动与越障过程进行了实验验证。
2 巡检机器人机构
机器人由前、后手臂及控制箱体三部分组成,前、后手臂分别安装在箱体上,每个手臂上有2个行走轮,每个行走轮都有电机驱动,如图1所示。如图2所示,机器人机构有14个自由度,包括10个旋转关节和2个移动关节,其中旋转关节J1和J2沿水平方向放置(与线路平行),通过电机1和电机2驱动实现轮1和轮2脱线及落线的运动;旋转关节J3和J4沿水平方向放置,通过电机3和电机4驱动实现轮3和轮4的脱线、落线运动;旋转关节J5和J6沿水平方向放置(与线路垂直),通过电机5和电机6驱动实现前臂和后臂的俯仰运动;移动关节J7和J8沿垂直方向放置,通过电机7和电机8驱动夹紧轮实现前臂和后臂的夹紧功能;旋转关节J9和J10沿垂直方向放置,通过电机9和电机10驱动实现前臂和后臂的回转运动,协助机器人实现有角度的交叉架空地线跨越。
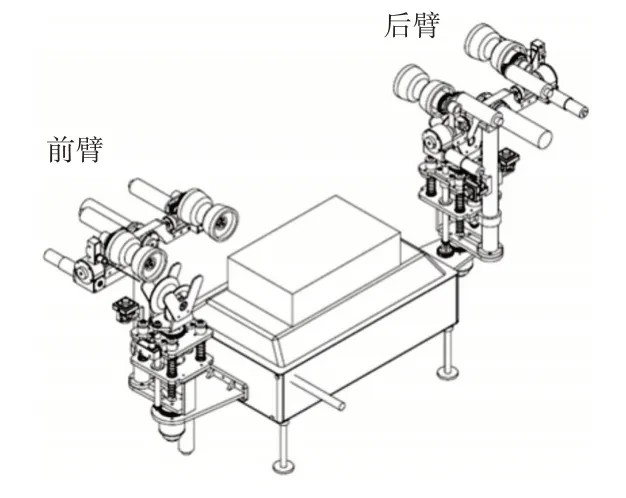
图1 机构示意图Fig.1 The Mechanism Schematic
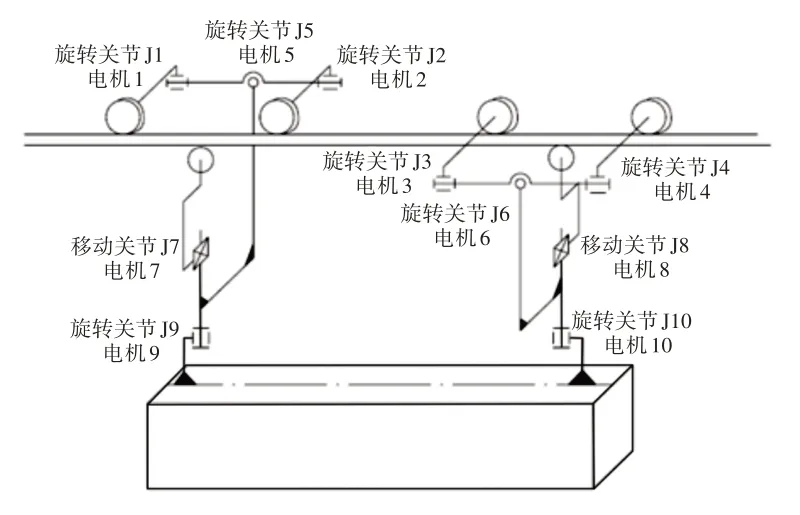
图2 机构简图Fig.2 Sketch of the Robot Mechanism
机器人的两个手臂上均包括行走机构、翻转机构、俯仰机构、夹紧机构及回转机构,前后手臂的一端通过回转机构与箱体相连,另一端铰接有俯仰机构,俯仰机构的两端分别有翻转机构。夹紧机构增的设计增大了行走轮与线路间的压力,而且行走轮兼有行走与夹紧的作用,有利于机器人行走爬坡和越障;翻转机构的设计可将行走轮由水平状态翻转到垂直状态,可将行走轮依次翻转至垂直状态跨越障碍物,无需调节机器人的质心和抬高手臂,提高了机器人的越障效率;机器人的回转机构可以调整机器人的行走方向,即使地线不在同一个铅锤面内,也不受环境障碍的影响。
3 巡检机器人的系统
3.1 巡检机器人系统组成
巡检机器人系统由巡检机器人和地面控制基站组成,如图3所示。巡检机器人主要包括电源、机器人本体、控制器、摄像机、图像及数据无线传输系统(机载部分)。巡检机器人能够在超高压输电线路的架空地线沿线行走以及跨越线路上和杆塔间障碍(包括单挂点和双挂点悬垂金具、压接管及防振锤等),携带摄像机等设备检测输电设施的损伤情况,机器人与地面监控器之间可实时通讯,实现机器人与地面监控端的数据及图像无线通讯传输,实现机器人对输电线路的通道、线路破损、金具、绝缘子及杆塔的巡检。此外,此外,搭载其它专用工具,还可用于线路测距、除冰、清除异物、涂漆等作业。
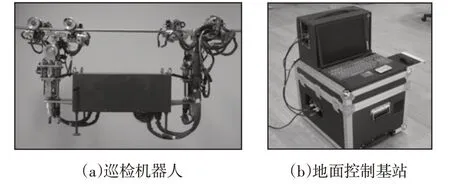
图3 巡检机器人系统Fig.3 Inspection Robot System

图4 巡检机器人控制系统Fig.4 Control System of Inspection Robot System
地面控制器主要包括发电机、监控系统、图像及数据无线传输系统(基站部分)及监视器等。地面控制基站和巡检机器人之间采用无线通讯方式,实现数据与图像的传输。地面控制基站不仅可以接收、显示及存储巡检机器人发回的状态信息及图像资料,而且可对巡检机器人进行遥操作,实现巡检机器人行走及越障等运动控制,并且可控制摄像机变焦、光圈以及云台调整等。地面控制器能够在监视器上显示实时图像和单桢图像。巡检人员根据机器人回传的图像和数据信息进行分析判断及处理。
3.2 巡检机器人的控制系统
巡检机器人沿超高压输电线路的架空地线行走,需要跨越防杆塔间的障碍物,由于实际输电线路中存在障碍物的大小、姿态等不确定因素,机器人自身的传感器信息还不足以完成机器人的自主越障,因此根据机器人的自身特点和实际线路的情况,开发了强电磁环境下遥控与局部自主相结合的嵌入式控制系统。巡检机器人控制系统包括巡检机器人本体控制器与地面端控制器两部分,针对机器人本体体积重量可靠性等方面的要求,基于嵌入式总线技术设计了机器人本体控制系统。地面监控平台采用工业控制计算机,基于Windows软件平台设计了人机交互平台。
机器人本体控制系统主要包括基于总线的控制器模块、图像及数据无线传输模块、电机驱动模块、传感器信息采集模块、电源模块等。无线传输模块负责接收监控平台发出的控制指令,并通过串口将指令发送给控制器。控制器根据码值信息对机器人的运动进行规划,通过PC104总线向各个执行单元发出指令信息。同时通过总线采集机器人的各种传感器信息,关节状态信息等,并通过无线传输模块发送给监控平台。
地面监控平台控制系统主要包括人机交互平台、图像及数据无线传输模块、图像采集与存储模块、发电机等。监控平台可以向机器人发送各种运动控制指令,接收机器人向监控平台发送的机器人状态信息(包括各个关节的角度、机器人状态、电池电量以及各种传感器的信息等),通过机器人传回的图像信息完成线路巡检作业任务。
4 障碍物跨越
超高压输电线路的架空地线有防震锤、单挂点悬垂金具、双挂点悬垂金具和压接管等典型障碍物。其中防震锤安装在线路塔杆悬点附近,用以吸收或减弱振动能量,防止线路的振动或舞动;单/双悬垂金具一端与杆塔连接,另一端支撑架空地线;压接管是将两根地线连接起来的金属管,压接表面不规则。直线杆塔处的障碍物为防震锤与单悬垂金具组合,或者为防震锤与双悬垂金具组合,如图5所示。

图5 杆塔障碍物情况Fig.5 Tower Obstruction State
根据巡检的任务要求研制出一台双臂四轮巡检机器人系统,机器人可跨越防震锤、单挂点悬垂金具、双挂点悬垂金具和压接管等障碍物,机器人跨越压接管的过程与跨越防震锤的过程相同,跨越单悬垂金具的过程与跨越双悬垂金具的过程类似,下面以机器人跨越防震锤与单悬垂金具的过程为例,详细分析机器人的越障过程。
机器人的前臂、后臂各有俯仰机构,机器人可利用俯仰关节将手臂上的行走轮抬起,脱离地线。因此机器人可借助俯仰关节依次将4个行走轮抬起越过防震锤,如图6所示。具体过程如下:(a)机器人前臂遇到防震锤,在遇障传感器的作用下机器人停止前进。(b)前臂夹紧机构打开,利用前臂俯仰机构将轮1抬起脱离地线。(c)机器人前进,轮1越过防震锤。(d)通过摄像头及图像处理系统使轮1落线,轮2脱离地线。(e)机器人前进使得轮2越过防震锤,前臂夹紧机构夹紧。
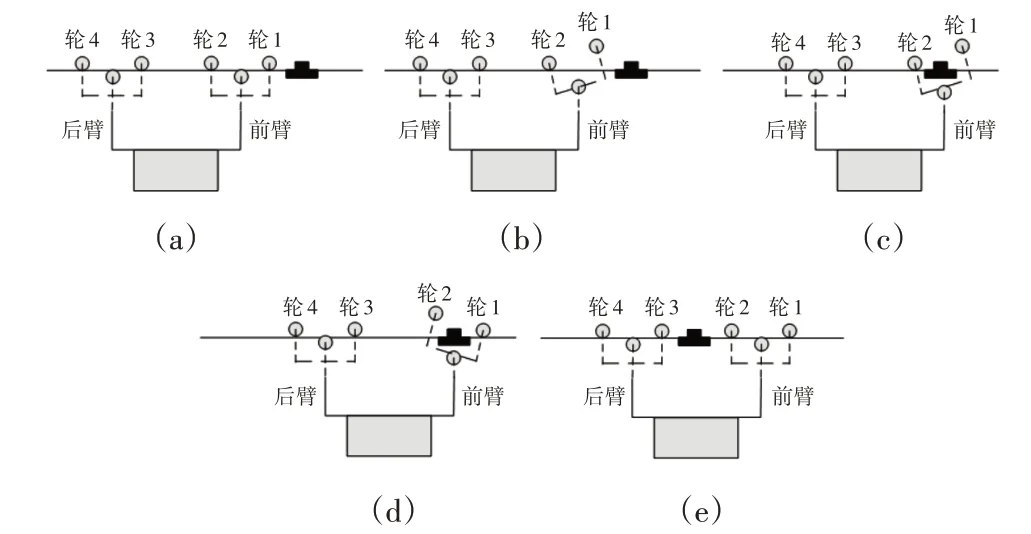
图6 跨越防震锤过程Fig.6 Process of Across Anti-Vibration Hamper
后臂的越障过程与前臂的越障过程类似。
5 试验研究
为验证巡检机器人机构及控制方法的正确性,在实验室搭建了1:1的模拟超高压输电线路环境。实验结果表明,机器人可跨越防震锤、单/双挂点悬垂金具和压接管等杆塔间障碍物。机器人前臂跨越单悬垂金具的试验过程,如图7所示。
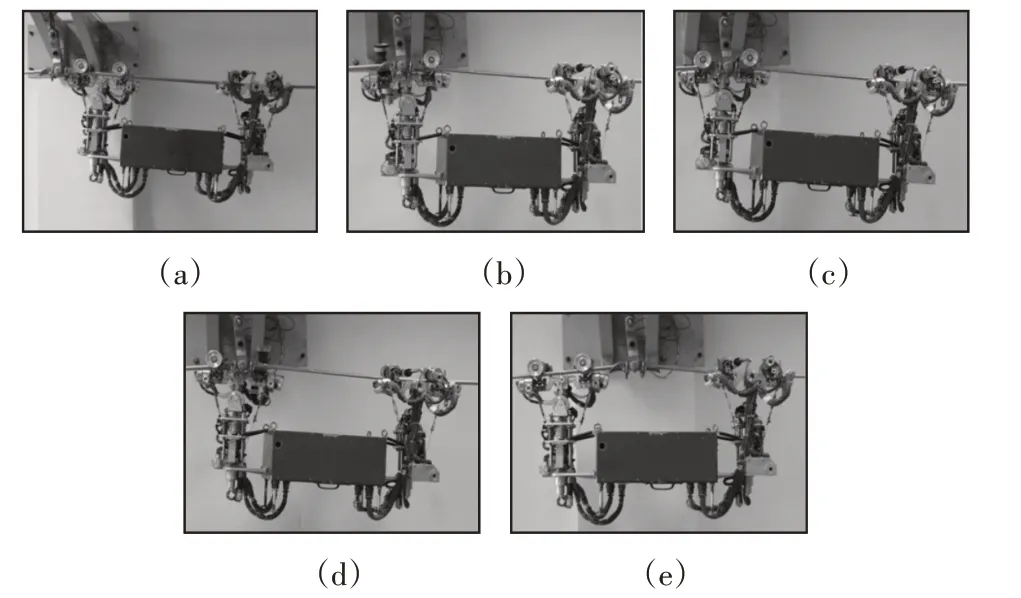
图7 越单挂点悬垂金具试验Fig.7 Experiment for Across Double Hanging Point
超高压输电线路巡检机器人样机具有以下功能:能够沿架空地线行走,具有跨越直线杆塔处障碍物(防震锤、单/双挂点悬垂金具等)的能力;其上携带摄像机用于检测输电设施(输电线、绝缘子及杆塔)的损伤及线路周围通道情况,能够在一个耐张段内跨越多级直线杆塔进行巡检;巡检机器人和地面控制基站之间采用无线通讯方式,地面控制器既可向机器人发送控制指令,也可以接收、存储及显示机器人发回的数据及图像资料,对机器人的运行状态具有远程控制和监测能力;机器人传回的动态图像存储采用数字硬盘录像机,可按需要随时调用监控的线路及杆塔情况。
6 结论
这里介绍了一种新型的双臂四轮巡检机器人机构,机器人由前臂、后臂及控制箱体三部分组成,每个手臂上均包括行走机构、翻转机构、俯仰机构、夹紧机构及回转机构。
巡检机器人能够在超高压输电线路上沿线行走,并能跨越线路上及杆塔间障碍物,通过机器人携带摄像机等设备实现对输电设施的检测。机器人的夹紧机构增大了行走轮与线路间的正压力,越障过程中采用行走轮依次跨越障碍物的方法,不需要调节机器人质心,并且机器人在行走及越障过程中至少有3个行走轮在线路上,因此机器人行走能力强、易于爬大角度线路,越障过程中机器人的安全保护性好。
猜你喜欢
电力勘测设计(2022年8期)2022-09-05 08:39:30
幼儿100(2022年23期)2022-06-10 03:33:30
直升机技术(2021年4期)2022-01-12 13:18:16
今日农业(2021年20期)2021-11-26 01:23:56
湖南电力(2021年4期)2021-11-05 06:45:12
云南化工(2020年11期)2021-01-14 00:51:02
娃娃乐园·综合智能(2018年23期)2018-12-26 08:56:38
测控技术(2018年5期)2018-12-09 09:04:50
环球时报(2017-11-21)2017-11-21 05:29:21
电测与仪表(2016年6期)2016-04-11 12:08:06