乒乓球机械发球轨迹智能预测方法研究
2023-07-27 07:06:24高颂爱王少伟
机械设计与制造 2023年7期
高颂爱,王少伟
(1.承德医学院,河北 承德 067000;2.天津体育学院,天津300381;3.河北师范大学,河北 石家庄 050024)
1 引言
乒乓球运动在世界各地都非常受欢迎,是一项趣味性、观赏性和竞技性极强的运动。在日常训练过程中,乒乓球机器人可以帮助运动员进行练习,提高运动员的训练效率,并节约人工陪练的训练成本[1]。对乒乓球机械发球轨迹进行预测可以帮助乒乓球教练员和运动员的判断和分析,提高运动员的竞技能力[2]。乒乓球机械发球轨迹预测涉及了机器人控制学、机器人运动学和深度学习等学科,其研究意义和研究价值较高。
文献[3]对运动数据进行采集,根据采集的数据建立运动学模型,对运动转向特性进行分析,结合Levenberg-Marquardt方法和扩展卡尔曼滤波方法对运动参数进行估计,根据参数估计结果完成轨迹预测,该方法没有分析目标在运动过程中受到的重力影响,降低了预测结果的精度。文献[4]采用镜像法获取运动的起始角,分析起始角与运动轨迹之间存在的关系,在此基础上建立轨迹预测模型,利用采集的运动数据对模型参数进行计算,最后利用轨迹预测模型完成轨迹预测,该方法在预测过程中没有考虑空气阻力,预测精度较低。文献[5]通过构建NGSIM数据集,提取运动特征,在长短期记忆网络中输入运动特征,完成轨迹预测,该方法在数据缺失的情况下无法准确的完成轨迹预测。
为解决上述方法中存在的问题,提出乒乓球机械发球轨迹智能预测方法。
2 乒乓球受力分析
乒乓球机械发球通常为旋转球,一般情况下分为侧旋、下旋和上旋,由流体力学理论可知,在飞行过程中带有旋转的乒乓球会受到浮力、空气阻力和重力的影响,同时乒乓球上下两侧在空气粘滞作用下也会受到侧压力的影响,这个侧压力即为马格努斯力[6]。
(1)乒乓球受到的重力与地面垂直,通常为竖直向下的,通过下式对乒乓球受到的重力G进行计算:
式中:g—重力加速度;m—乒乓球的质量。对上式进行分析可知,质量与重力呈正相关。
(2)乒乓球受到的空气阻力与乒乓球运动方向相反,用Gd表示乒乓球受到的阻力,可通过下式计算得到:
式中:VD—空气阻力因子;b—乒乓球在运动过程中的线速度;ρ—空气密度;||b||—乒乓球线速度对应的绝对值;t—乒乓球的半径;S—乒乓球在运动过程中的迎风面积。
(3)乒乓球旋转轴与其受到的马格努斯力Gm之间为垂直关系:
式中:VL—空气阻力因子;ξ—乒乓球在运动过程中的角速度;F—乒乓球直径。
根据乒乓球的反弹系数在竖直方向中对反弹系数进行计算。设Lη代表的是反弹系数,其计算公式如下:
式中:h—在H高度释放乒乓球时反弹的最大高度。
当乒乓球在z轴的初始速度vz0为正值时,乒乓球在z轴方向从起始位置运动到最高点的时间用tH表示,可在时间定义域的基础上计算得到。当乒乓球在z轴的初始速度vz0为负值时,利用下式对时间tH进行计算:
式中:lf—空气阻力系数。在上式的基础上对碰撞前乒乓球的最大高度H进行计算:
根据上述分析可知,在z轴方向中反弹后乒乓球的速度通常为正。反弹后乒乓球运动到最大高度h所用的时间th可通过下式计算得到:
仅知道参数h,无法得到反弹后乒乓球的初速度。为此,乒乓球机械发球轨迹智能预测方法采用位置负反馈方法对反弹后乒乓球的初速度v0进行计算:
式中:Lp—比例系数,其主要作用是调整速度。根据初速度v0对乒乓球最大高度h1进行计算,根据结果对反弹后乒乓球的初速度进行调整。
设tL代表的是最高点处的乒乓球降落到落点所用的时间,其表达式如下:
式中:Xball—乒乓球的中心。
乒乓球自旋速度、视觉测量误差和空气阻力都会影响碰撞前后乒乓球的速度变化[7-8]。反弹模型在实际应用过程中,可用一阶多项式表示X、Y方向中乒乓球的速度变化:
式中:Vxh—乒乓球碰撞后在X方向中的速度;Vyh—乒乓球碰撞后在Y方向中的速度;Vxq—乒乓球碰撞前在Y方向中的速度;Vyq—乒乓球碰撞前在Y方向中的速度;nx、ny—反弹参数。
3 轨迹预测
这里采用递归神经元网络对轨迹进行预测。递归神经网络由输出层、隐层和输入层构成,LSTM单元存在于递归神经网络的隐层中[9]。
每个单元都由输出门、核心节点、遗忘门和输入门构成。
用ct表示当前时刻递归神经网络的输入值,上一时刻Cell节点在LSTM单元中的输出用dt-1c表示,设nt-1h代表的是上一时刻中,其他节点在LSTM单元中的输出。因此非线性激活加权处理后的其他节点输出、Cell输出和当前输出获得输入门输出nt
l:
式中:f—非线性激活函数,乒乓球机械发球轨迹智能预测方法选用Sigmoid 函数[10];eil—针对输入门,输入项对应的权重参数;ehl—其他节点输出项在上一时刻对应的权重参数;ecl—Cell输出项在上一时刻对输入门对应的参数权重。
同理,遗忘门在当前时刻的输出nt ϕ与输入门计算方式相同:
通过上一时刻其他节点和Cell的输出,当前时刻遗忘门和输入门的输出以及当前时刻的输出,获得Cell节点在当前时刻单元中的输出:
式中:g—Sigmoid函数。
在上式计算结果的基础上,获得LSTM单元在递归神经网络中的总输出:
式中:h—Sigmoid函数。将上式计算结果引入下式中,获得单元在网络中的输出ntc:
为对乒乓球机械发球轨迹进行预测,乒乓球机械发球轨迹智能预测方法构建的递归神经网络应该具有LSTM单元,将t时刻乒乓球的三维空间位置输入递归神经网络中,输出t+ 1时刻乒乓球的空间位置,完成轨迹预测。
在TensorFlow平台构建的递归神经网络,如图1所示。

图1 递归神经网络Fig.1 Recurrent Neural Network
采用递归神经网络对乒乓球机械发球轨迹进行预测,获得乒乓球机械发球轨迹预测流程图,如图2所示。
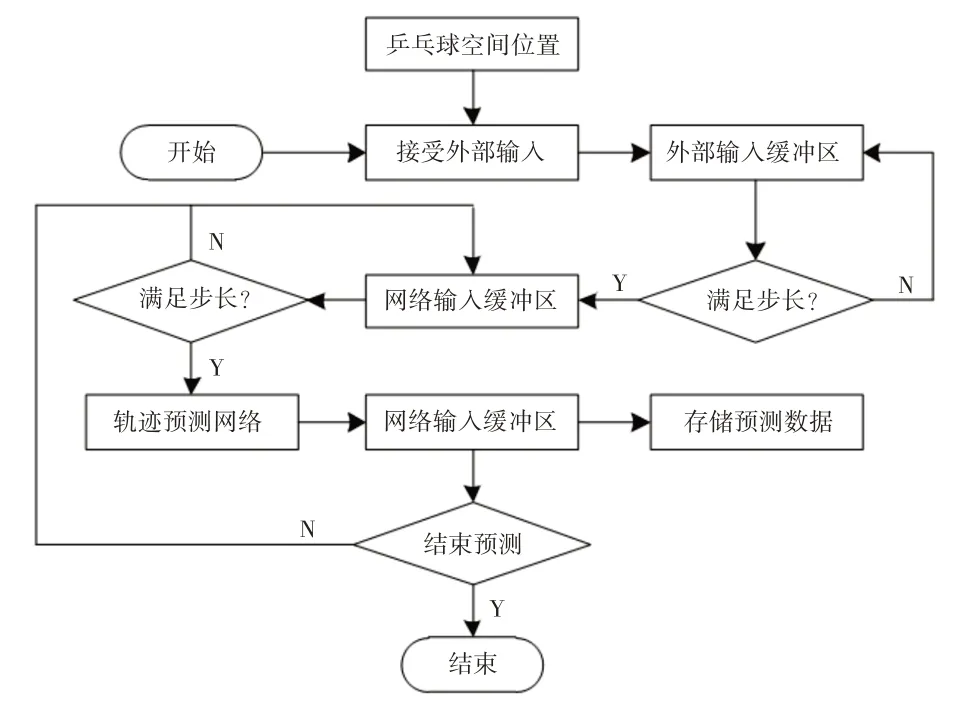
图2 轨迹预测流程图Fig.2 Flow Chart of Trajectory Prediction
4 仿真分析
为验证乒乓球机械发球轨迹智能预测方法的整体有效性,需要对乒乓球机械发球轨迹智能预测方法进行测试。
分别采用乒乓球机械发球轨迹智能预测方法、文献[3]方法和文献[4]方法对乒乓球机械发球轨迹进行预测,获得对比结果,如图3所示。分析图3可知,采用所提方法对乒乓球机械发球轨迹进行预测时,获得的预测轨迹与实际轨迹基本相符,x轴和y轴的误差极小,可忽略不计。文献[3]方法和文献[4]方法对乒乓球机械发球轨迹进行预测时,获得的预测轨迹在x轴和y轴方向中均存在误差,表明以上两种方法无法准确的对乒乓球机械发球轨迹进行预测。通过上述测试结果,验证所提方法具有较高的预测精度,因为所提方法对轨迹进行预测之前,对乒乓球的受力特征进行了分析,在此基础上对轨迹进行预测,提高了预测精度。

图3 不同方法的轨迹预测结果Fig.3 Trajectory Prediction Results of Different Methods
在预测过程中引入干扰,对所提方法、文献[3]方法和文献[4]方法的轨迹进行预测,获得预测结果,如图4所示。
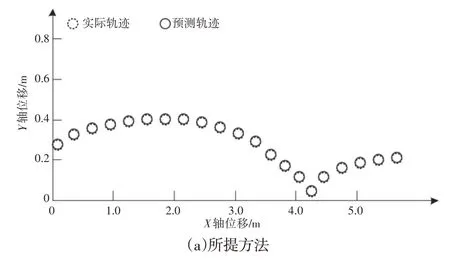
图4 引入干扰后的测试结果Fig.4 Test Results After Introducing Interference
分析图4可知,引入干扰后,所提方法的预测结果没有受到影响,文献[3]方法和文献[4]方法的预测结果偏差增大,表明文献[3]方法和文献[4]方法受干扰的影响较大。在预测过程中存在数据缺失现象,数据缺失会对轨迹预测精度产生影响,采用所提方法、文献[3]方法和文献[4]方法在数据缺失情况下对乒乓球机械发球轨迹进行预测,对比不同方法的预测精度,获得测试结果,如表1所示。

表1 不同方法的预测精度Tab.1 Forecast Accuracy of Different Methods
分析表1可知,随着数据缺失程度的增加,所提方法、文献[3]方法和文献[4]方法的预测精度不断降低,表明上述方法的预测精度受数据缺失的影响较大,在相同数据缺失程度下对比上述方法的测试结果发现,所提方法在相同条件下获得的预测精度均高于文献[3]方法和文献[4]方法,表明所提方法具有良好的预测性能。
5 结束语
乒乓球机械发球轨迹预测随着乒乓球机器人技术的发展受到了较多专家和学者的关注,乒乓球的旋转方向、旋转速度和运动速度都会对乒乓球的运动轨迹产生影响,目前乒乓球机械发球轨迹预测方法存在预测精度低的问题,提出乒乓球机械发球轨迹智能预测方法,在乒乓球受力特点的基础上对其轨迹进行预测,提高了轨迹预测结果的精度,为运动员的训练提供了便利。
猜你喜欢
哈哈画报(2022年5期)2022-07-11 05:57:58
运动精品(2021年6期)2021-10-25 09:14:02
文体用品与科技(2021年2期)2021-02-04 06:01:06
读友·少年文学(清雅版)(2020年4期)2020-08-24 07:36:26
读友·少年文学(清雅版)(2020年3期)2020-07-24 08:57:04
幼儿画刊(2020年4期)2020-05-16 02:53:26
小学生学习指导(低年级)(2019年9期)2019-09-25 07:43:18
幼儿画刊(2018年7期)2018-07-24 08:26:08
现代装饰(2018年5期)2018-05-26 09:09:39
中国三峡(2017年2期)2017-06-09 08:15:29