工业机器人的电磁兼容发射测试标准解读
2023-07-26 16:12姚家俊
品牌与标准化 2023年3期
【摘要】随着计算机的处理能力日益强大以及人工智能技术越来越成熟,各类工业机器人被设计出来并被逐渐应用到工业生产中,缓解了因我国人口老龄化造成的劳动力成本升高的压力。但这些工业机器人在投入使用前都必须经过严格的安全及电磁兼容测试。本文介绍了适用于工业机器人的国家标准,并结合实际样品介绍电磁兼容发射测试项目。
【关键词】工业机器人;国家标准;电磁兼容
【DOI编码】10.3969/j.issn.1674-4977.2023.03.002
Interpretation of Electromagnetic Compatibility Emission Test Standards for Industrial Robots
YAO Jiajun
(Guangdong Testing Institute of Product Quality Supervision,Guangzhou 510000,China)
Abstract:With the increasing processing power of computers and the maturity of artificial intelligence technology,various types of industrial robots have also been designed and gradually applied to industrial production,alleviating the pressure of rising labor costs caused by Chinas aging population. But these industrial robots must undergo strict safety and electromagnetic compatibility testing before being put into use. This article introduces the national standards applicable to industrial robots and introduces electromagnetic compatibility emission testing projects based on actual samples.
Key words:industrial robot;national standard;electromagnetic compatibility
2021年12月,工业和信息化部、国家发展和改革委员会、科学技术部等15个部门联合发布了《“十四五”机器人产业发展规划》。该规划中指出在过去的8年中,我国一直是全球最大的工业机器人消费国,争取在2025年我国能成为全球工业机器人创新技术发源地、高端制造集聚地和集成应用新高地。机器人的发展对国家的发展起着至关重要的作用。由于工业机器人一般工作在复杂的电磁环境下,且会产生较强的电磁骚扰,因此一台合格的机器人不仅要能完成日常的任务,还需要有较好的电磁兼容性能。
1工业机器人电磁兼容标准现状
2016年,工业和信息化部、国家发展和改革委员会等部门建立了一种专门针对机器人产品的认证——CR认证(China Robot Certification)。在过去,工业机器人使用的电磁兼容标准是GB/T 17799.2—2003《电磁兼容通用标准工业环境中的抗扰度试验》[1]和GB 17799.4—2012《电磁兼容通用标准工业环境中的发射》[2]。后来为了更好地规范工业机器人的电磁兼容性,相关技术机构联合制定了更适用于工业机器人的GB/T 38326—2019《工业、科学和医疗机器人电磁兼容抗扰度试验》[3]和GB/T 38336—2019《工业、科学和医疗机器人电磁兼容发射测试方法和限值》[4]两项标准。这两项标准均于2019年12月10日由国家市场监督管理总局和国家标准化管理委员会发布。因此在2021年2月,CR认证将工业机器人的电磁兼容项目检测依据由原来的GB/T 17799.2—2003和GB 17799.4—2012改为GB/T 38326—2019和GB/T 38336—2019。新标准中不仅测试项目齐全,对不同使用环境、不同类别的工科医机器人的测试限值、测试布置、测试时的运行状态都有详细描述,使测试更加严谨,提高测试的一致性。
电磁兼容发射标准GB/T 38336—2019相对GB/T 17799.4—2012有如下变化:1)适用于工科医机器人(包括:焊接机器人、喷涂机器人、搬运机器人等),适用范围更加具体;2)根据工业机器人的安装方式分为了固定式工科医机器人和移动工科医机器人;3)增加工科医机器人在测试时需达到的工作状态;4)增加对机器人的分组分类,不同组别的机器人对应不同的发射限值;5)增加额定功率>20 kVA的工科医机器人电源端口传导骚扰限值和1 GHz以下辐射骚扰限值;6)辐射骚扰的测试场地取消全电波暗室和TEM小室;7)增加对工科医机器人的谐波电流和电压波动与闪烁两个项目。
2工业机器人电磁兼容标准要求
工業机器人的电磁兼容性能包括电磁骚扰和电磁抗扰。GB/T 38336—2019规定了工业机器人的电磁骚扰测试频率及限值,GB/T 38326—2019规定了工业机器人的电磁抗扰项目及限值,具体测试项目见表1。

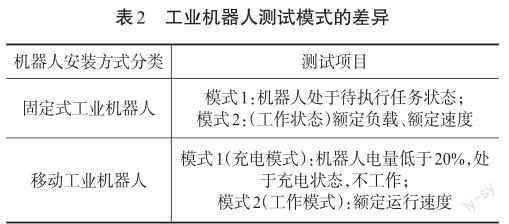
工业机器人根据其安装方式分为固定式工业机器人和移动工业机器人,它们在测试时的工作模式也有不同,具体差异见表2。
接下来以机械臂为例介绍电源端传导骚扰和辐射骚扰项目及其布置。根据机械臂说明书,该机械臂不使用9 kHz~ 400 GHz频段内射频能量或用于传输电磁能量,且使用在非居住环境,因此可以判断机器人为1组A类,落地式的固定式工业机器人。
2.1电源端口传导骚扰
测量电源端口传导骚扰时,需在水平参考接地平面上用不高于15 cm的绝缘材料支撑机械臂,机器人控制柜放置在不干涉机械臂正常工作的位置,同样使用不高于15 cm的绝缘材料支撑。测试布置如图1。将机器人控制柜与人工电源网络连接,打开电源,使机械臂在待执行任务状态及工作状态下进行测试,测试结果见图2、图3。

电源端口传导骚扰项目整改建议如下:1)若超标频率段较高,可以检查电源线附近有无信号线,如果有,则加大信号线与电源线的距离或使用具有屏蔽层的信号线;2)机箱内部走线需合理布置,高压线与低压线尽量分开,避免骚扰相互耦合;3)加装滤波器,若原来就已经加装了滤波器但测试仍不合格,可以更换为具有更强滤波能力的滤波器,注意应将滤波器安装在电源入口处,滤波器的金属外壳与机箱紧密贴合,搭接面积越大越好。
2.2辐射骚扰
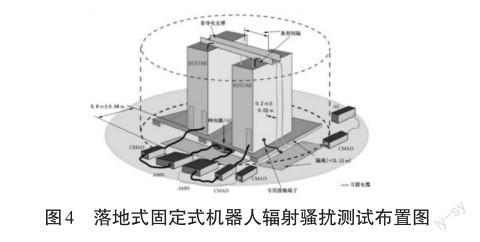
GB/T 38336—2019对1组A类工科医机器人在9 kHz~30 MHz频段内无限值要求。将机械臂放置在半电波暗室中,使用高度不超过15 cm的绝缘材料支撑起来,机器人控制柜放置在不干涉机械臂正常工作的位置,同样使用不高于15 cm的绝缘材料支撑,机器人控制柜与机械臂的连接电缆应与地面绝缘(绝缘距离不超过15 cm),过长部分应在电缆中心附近以30~40 cm长的线段分别捆扎成S形。测试布置如图4。
若电缆过于粗大或刚硬而难以处理成上述条件,则可以按实际情况进行布置,但不能盘成圈,这对测试结果的影响很大。连接电缆由于过于粗硬,过长部分无法捆扎成S形。若将连接电缆放置在绝缘材料上且盘成圈(如图5),天线极性为垂直方向的测试结果较差,结果如图6,30.92 MHz频率点的准峰值为47.63 dBμV/m,超过限值7.63 dBμV/m,判定为不合格。若将连接电缆平放在绝缘材料上(如图7),天线极性为垂直方向的测试结果较差,结果如图8,原来超过限值的波形已消失,准峰值最大值39.63 dBμV/m出现在32.73 MHz频率点,未超过限值,判定为合格。


辐射骚扰项目整改建议如下:1)改善机箱屏蔽性,减小通风孔尺寸,在缝隙处贴上铜箔;2)改善电路板布局和走线设计,尽可能减小信号线与回线的环路;3)对产生辐射骚扰的部分进行局部屏蔽;4)在电源端口处添加滤波器或在信号线上添加磁环;5)使用具有屏蔽层的信号线。
3结语
本文结合某品牌的机械臂实例讲解了GB/T 38336—2019中需要做的电源端传导骚扰和辐射骚扰项目及其整改建议,使其在使用的过程中不发射导致其他设备无法正常工作的电磁干扰,有利于我国工业机器人领域的高质量发展,同时也为工科医机器人的认证测试及设计研发提供参考。
【参考文献】
[1]电磁兼容通用标准工业环境中的抗扰度试验:GB/T 17799.2—2003[S].
[2]電磁兼容通用标准工业环境中的发射:GB/T 17799.4—2012[S].
[3]工业、科学和医疗机器人电磁兼容抗扰度试验:GB/T 38326—2019[S].
[4]工业、科学和医疗机器人电磁兼容发射测试方法和限值:GB/T 38336—2019[S].
【作者简介】
姚家俊,男,1997年出生,研究方向为电磁兼容检测。
(编辑:于淼)
猜你喜欢
机械制造文摘·焊接分册(2020年4期)2020-01-11
机械制造文摘·焊接分册(2020年4期)2020-01-11
机械制造文摘·焊接分册(2020年4期)2020-01-11
机械制造文摘·焊接分册(2020年4期)2020-01-11
电子技术与软件工程(2016年22期)2016-12-26
科技创新导报(2016年21期)2016-12-17
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
科技视界(2016年23期)2016-11-04
科技视界(2016年18期)2016-11-03
企业导报(2016年13期)2016-07-19