基于改进遗传算法的干扰资源分配方法研究
2023-07-15 14:00郝万兵
火控雷达技术 2023年2期
郝万兵 张 军 张 昕
(西安电子工程研究所 西安 710100)
0 引言
现代信息化战争中,电磁空间的争夺愈演愈烈[1]。作为战场上重要的电磁要素,敌我双方雷达与干扰装备的对抗呈现日益激烈的态势[2]。实际作战中,雷达多采用分布式多节点布站形式对战场区域内威胁目标进行联合探测,以获取更准确、有效、及时的目标信息,干扰方需要采用多部干扰机同时干扰方式应对分布式雷达探测威胁[2]。
干扰方在干扰分布式雷达探测系统过程中,需要根据各干扰机对不同雷达的差异化效能,将可利用的干扰资源进行合理分配,使干扰对抗系统发挥最大优势,对雷达网形成最大破坏力。战前需要对敌方威胁雷达网的辐射源数量、位置、信号特征、功率等参数进行侦察,根据我方遂行作战任务,制定电磁攻击、防御方案,基于电磁作战计划,确定各威胁辐射源威胁等级,参考历史对抗数据、专家系统、智能对抗推理系统等确定干扰效能矩阵[3]。
传统干扰资源分配多采用经典组合优化方法,当对抗系统资源规模较小时,可采用0-1规划、贴近度、模糊多属性动态规划等最优质求解方法确定最优资源分配组合[4]。当对抗系统规模超过一定范围时,组合优化方法的弊端凸显,除消耗较大的运算开销外,还会增加无法求解的可能性,此时可以考虑启发式优化方法求解[8]。遗传算法(Genetic Algorithm,GA)最早是由美国的 John holland于20世纪70年代提出,该算法是根据大自然中生物体进化规律而设计提出的[4]。该算法作为一种经典的启发式优化方法,在较多求解优化问题场景中得到应用,在干扰资源分配问题的求解中,有学者采用遗传算法及其改进算法对模型求解进行了研究[8]。在改进算法中,从编码方式、算子选择、遗传迭代、小生境问题等方面做了大量尝试。本文基于传统遗传算法,采用二进制编码形式与排序选择算子,在父代遗传环节可以将优秀的基因直接遗传,通过Matlab仿真验证了改进算法的高效性。
1 干扰资源分配模型
假设战场中我方干扰机为J,干扰机数量为N,则我方干扰机的集合为[7]
J={J1,J2,…,JN}
(1)
假设战场中敌方雷达为R,雷达数量为M,则敌方雷达的集合为[7]
R={R1,R2,…,RM}
(2)
根据敌方雷达威胁等级进行干扰资源分配时,分配矩阵为干扰对象分配,策略矩阵分配方法如图1所示。
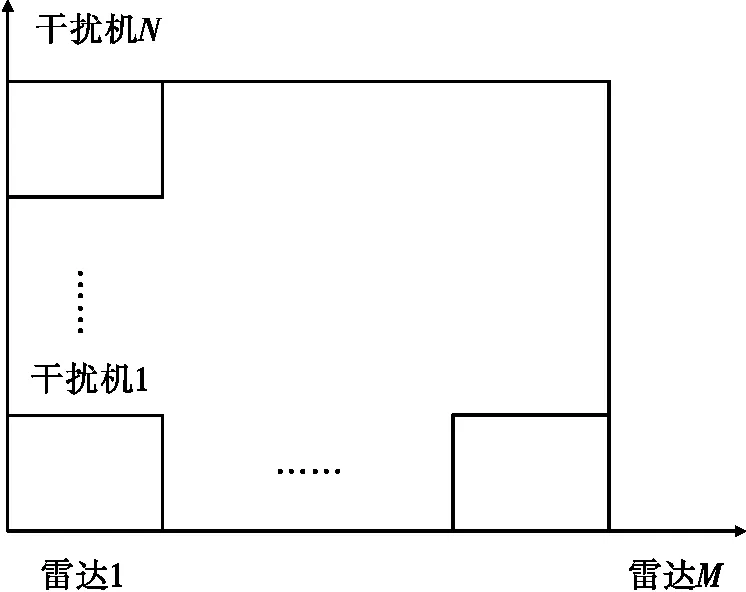
图1 策略矩阵方法示意图
定义策略矩阵元素s(xnm),策略变量xnm,(xnm=0or1,n=1,2,…N;m=1,2,…,M),xnm表示第n部干扰机对第m部雷达的电磁攻击行为参数值,当xnm=1时,代表第n部干扰机对第m部雷达实施电磁干扰,否则不干扰。
当策略矩阵选择最优值时,干扰系统总干扰效能达到峰值。因此,干扰总效能的求解为[5]
(3)
其中:w为不同的评估指标权重系数;j为评估指标个数;Enm,i为第i个评估指标下第n部干扰机对第m部雷达的干扰效能。分别为干扰机与雷达的数量,为不同场景下的干扰效能指标。
实际作战中,一个任务规划时隙内,单部干扰机只能对战场中其中一部威胁雷达进行电磁攻击,任意一部雷达可被多部干扰机同时电磁攻击。根据我方干扰机与敌方雷达规模情况的不同,按照下述三种情况分析[8]。
1)干扰机数量与雷达数量相同:
此时N=M,干扰机数量与雷达数量相同,任意一部雷达在一个任务规划时隙内只受其中一部干扰机电磁攻击,则在求解干扰总效能时定义下述约束条件如式(4)所示。
(4)
(2)干扰机数量大于雷达数量:
此时N>M,干扰机数量大于雷达数量,任意一部雷达在一个任务规划时隙内可以受到超过一部干扰机电磁攻击,则在求解干扰总效能时定义下述约束条件如式(5)所示。
(5)
3)干扰机数量小于雷达数量:
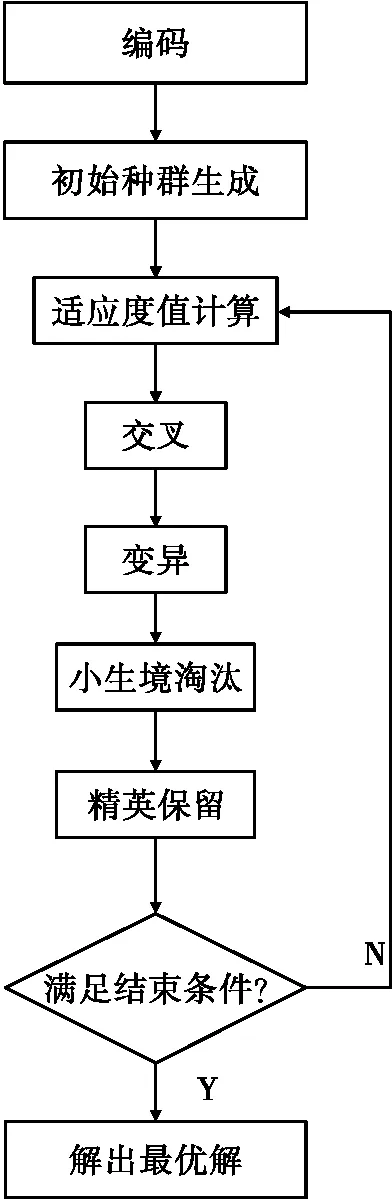
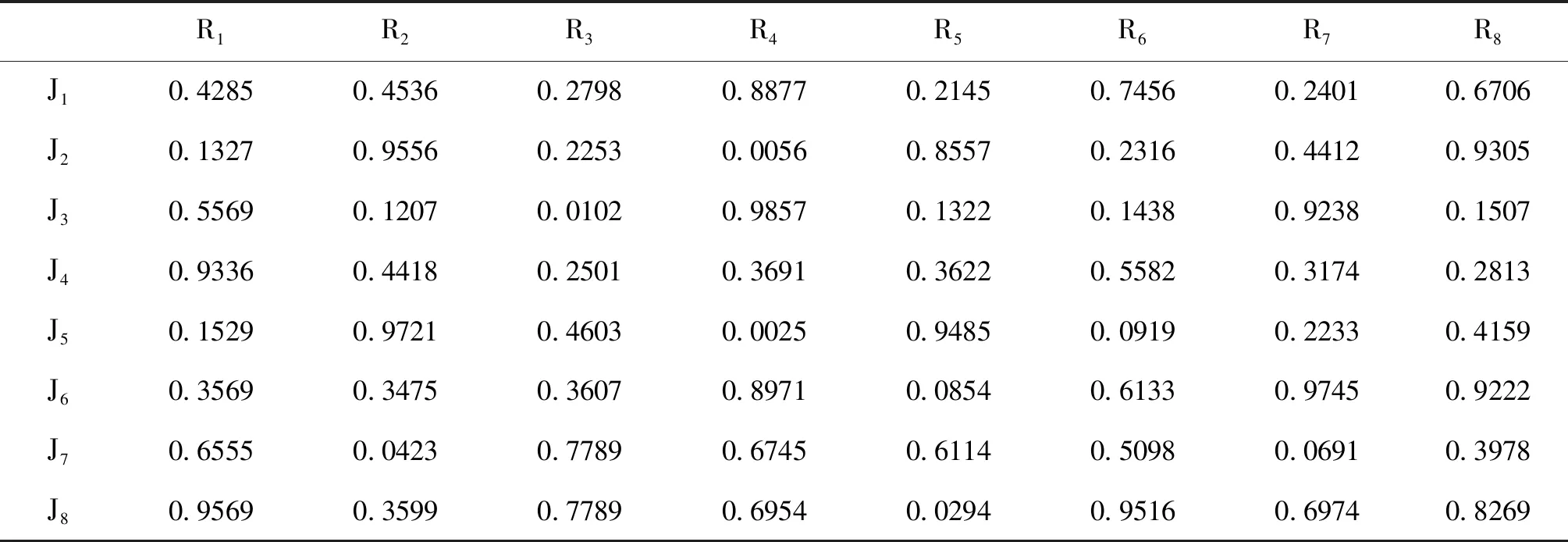
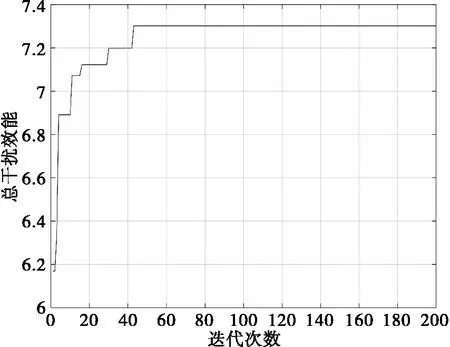
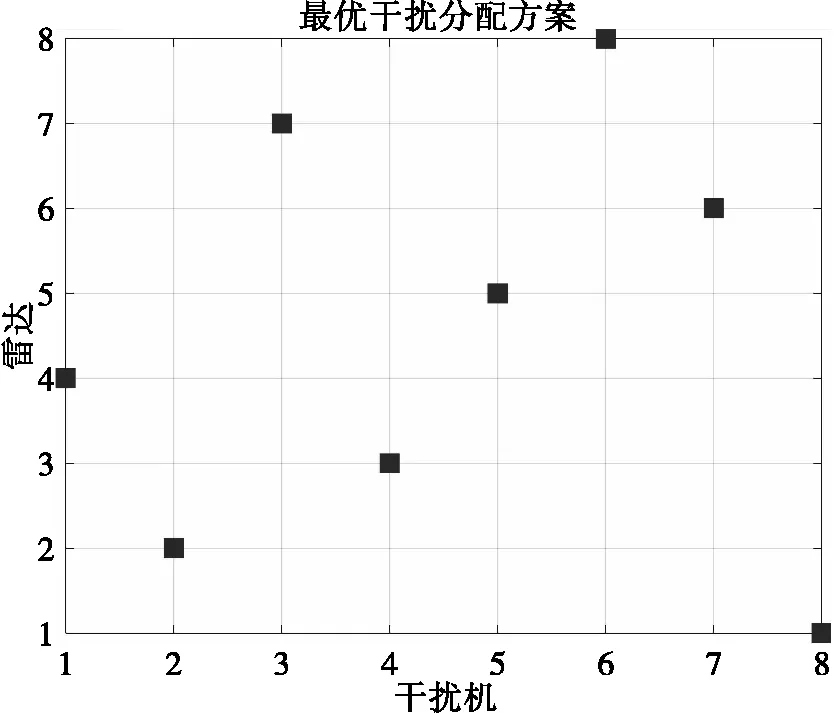
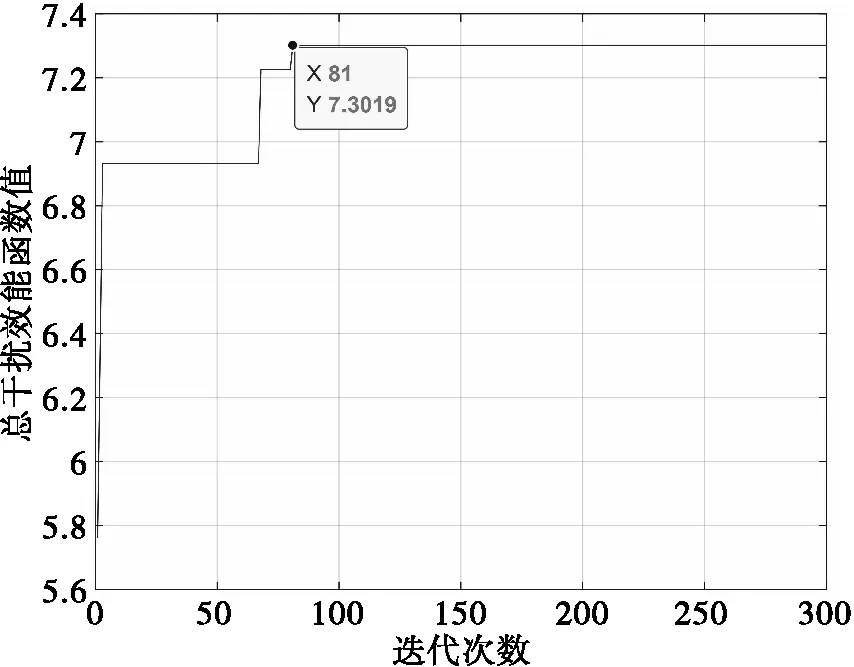
此时N (6) 遗传算法是最常用的智能算法之一,基本思想是:在问题求解过程中,把搜索空间视为遗传空间,把问题的每一个可能解看作一个染色体,所有染色体组成一个种群。首先随机选择部分染色体组成初始种群,依据某种评价标准(适应度函数),对种群中每一个染色体进行评价,淘汰适应度值小的,保留适应度值大的,并借助于自然遗传学的遗传算子,产生出代表新的解集的种群[9]。遗传算法具有适用性广、搜索方向性强、自组织、自适应、自变迁等优点,但效率相比传统算法低、容易过早收敛、定量分析性不足等问题的存在也带来了一定的局限性[7]。 传统遗传算法主要包括算子选择、染色体片段交叉、基因变异三个基本的操作。根据干扰资源分配实际问题的特点,将传统遗传算法进行改进,采用二进制编码形式与排序选择算子,在父代遗传环节可以将优秀的基因直接遗传,具体步骤如下: 1)选择编码策略: 编码是表现映射到基因型的过程。常用的编码方式包括二进制编码、实数编码、整数编码等。二进制编码形式简单,但在分配规模过大时存在编码过长的问题;实数编码在离散型变量场景中需要离散化处理,计算量激增的同时引入计算误差[7]。在论文设定场景中,干扰机对雷达的状态包括干扰与不干扰两种,因此选择二进制编码形式。基因数为N×M,xnm为基因项,染色体为二维矩阵,用Xk来表示,k为染色体种群序号,则: (7) 2)初始种群的生成: 在式(4)、式(5)、式(6)约束条件下,采用随机数填充Xk矩阵,生成Q个初始染色体,Q为种群规模数量,以此作为迭代起点。 3)适应度函数构建: 遗传算法中采用适应度函数来表征进化中个体的优劣,是遗传进化过程中优胜劣汰的准则,根据式(3)中对干扰效能的定义,生成目标函数来评估个体的适应程度。 (8) 4)选择算子: 遗传算法中,搜索的方向性与随机性互为矛盾。增加随机性可以更大的概率找到最优解,但降低了算法的收敛速度;反之,容易陷入局部最优循环。本文采用排序选择的操作方法。 按照式(8)计算适应度函数值,按照降序排序,产生一组Q维概率向量,k为概率向量列向量个数[7]。将向量中的元素同步做降序排列,按照适应度值的次序将概率向量中相应的元素分配给单个染色体。总之,适应度高的个体更有可能进入下一代迭代,即: (9) 5)交叉算子: 为了提高算法的全局寻优能力,采用基于位置的多点交叉方式进行算子交叉。交叉个体随机、交叉基因段随机。首先以一定的概率随机选择两个父代染色体,然后在选中的父代染色体中相同位置设置多个交叉点,通过个体交叉、基因片段交叉产生新生代染色体[6]。 6)变异算子: 为了增加种群的多样性与局部搜索能力,选择动态自适应概率pm对算子进行变异操作[7]。 (10) 7)小生境淘汰: 当遗传至某一个峰值时,容易陷入局部最优问题,导致邻近个体进化停止。采用小生境淘汰模式避免该情况。 设定合理门限,当变异后的个体间的欧式距离小于该门限,且适应度函数较低时,对该变异进行惩罚,淘汰变异后的劣势个体。 8)精英代直接保留: 将父代精英个体中适应度较高的个体进行直接进化,保留优秀的个体。 9)终止迭代: 经过多次迭代后,种群不再进化或达到迭代次数的上限,终止迭代。 算法流程如图2所示。 图2 算法流程图 1)实验一 假定我方8部干扰机(M=8)对敌方8部雷达(N=8)实施干扰。采用随机生成法预设每部干扰机对每部雷达的干扰效能指标,如表1所示,利用改进遗传算法进行最优分配方案求解。 表1 雷达干扰效能矩阵 经过43次迭代,获取最优解,最佳染色体为 即第1部干扰机干扰第4部雷达;第2部干扰机干扰第2部雷达;第3部干扰机干扰第7部雷达;第4部干扰机干扰第3部雷达;第5部干扰机干扰第5部雷达;第6部干扰机干扰第8部雷达;第7部干扰机干扰第6部雷达;第8部干扰机干扰第1部干扰机,最大干扰效能为7.3019。仿真计算结果如图4所示。 改进方法中总干扰效能与迭代次数的关系如图3所示,迭代次数为43次时生成最优解。 图3 改进遗传算法总干扰效能与迭代次数的关系图 最优分配方案仿真结果如图4所示。 图4 最优分配方案仿真结果示意图 2)实验二 设定条件与实验一中相同,采用8部干扰机对8对雷达干扰,干扰效能矩阵如表1所示,使用传统遗传算法进行仿真迭代,同样可以得到最优分配方案,分配结果与实验一一致,但迭代次数较多,迭代81次后,得到最优解。总干扰效能与迭代次数的关系如图5所示,迭代次数为81次时生成最优解。 图5 传统遗传算法总干扰效能与迭代次数的关系图 本文采用了改进型遗传算法对分布式干扰中资源分配问题进行求解,采用二进制编码形式、排序选择算子、自适应动态调整变异、小生境淘汰、精英遗传等方法,得到较优的分配方案和较少的迭代次数。通过Matlab仿真实验对传统方法与改进方法的分配结果与迭代次数进行了对比,改进方案迭代速度更优。 实际使用过程中,干扰效能矩阵中元素值较接近时,会增加迭代次数,在后续研究中需要进一步改进。2 基于改进遗传算法的模型最优值求解
3 仿真实验
4 结束语
猜你喜欢
计算机仿真(2022年8期)2022-09-28
数学物理学报(2021年2期)2021-06-09
应用数学(2020年2期)2020-06-24
航天电子对抗(2019年4期)2019-12-04
数学年刊A辑(中文版)(2018年2期)2019-01-08
北京航空航天大学学报(2017年9期)2017-12-18
数学物理学报(2016年3期)2016-12-01
军事运筹与系统工程(2016年4期)2016-07-10
现代兵器(2016年6期)2016-06-25
中国塑料(2016年11期)2016-04-16