外部引导式停车场泊车引导系统
2023-07-13 10:34钟新华杨艳
电子制作 2023年11期
钟新华,杨艳
(攀枝花学院 智能制造学院,四川攀枝花,617000)
0 引言
随着5G 网络的问世,在停车场智能化方向的停车场泊车系统的设计有了实现的可能性。无论是宝鹤鹏[1]所提出的利用多传感器标定与融合数据的方法来实现自动泊车功能。还是孙康康[2]所提出的利用物联网与Dijkstra 结合识别车牌引导停车的方法。都是新时代的产物,但却普遍存在着局限性,智能化程度高,但因为修建成本高昂,无法实际运用到干扰信号强的复杂停车场景中。韩浩然[3]利用手机APP 和车位传感器结合,实现智能泊车成本低廉。但从车主心理学角度分析,无法实现,且仅适用于小区等停车库。从车主和停车场管理方利益最优化,则需要一种改造成本低廉、适用于所有用户群体、不对车辆改造、适用于各种复杂停车场的停车场管理系统。在智能化的基础上,只借助停车场现有设施实现车辆智能泊车智能引导。基于以上问题,提出了一种外部引导式停车场管理系统,来解决车辆在停车场入口处或在停车场内停车寻找车位时,造成路口堵车排队形成的问题。
1 总体概述
■1.1 系统设计概念
目前停车系统过于繁杂,智能化程度随成本上升导致实用性降低。各场所系统不同,多数停车场存在信号差,干扰强的问题,导致APP、车联网等需要用户进行接入式的系统存在局限性,无法大规模进行普及。
本系统的优点在于,在智能引导泊车的基础上,设备全外部接入。即无APP、无信号、无感引导,具有高普及性,针对现有老旧停车场进行智能化改造,实现减少人工成本的效果。通过单片机控制的显示屏与车位车牌结合,实现无信号引导,避免了因地下停车场导致的手机引导无信号、系统复杂成本高昂的缺点。
■1.2 系统设计框架
如图1 所示,该系统由电源供电部分、车位检测部分、单片机接收信息处理反馈部分和显示牌引导部分组成。
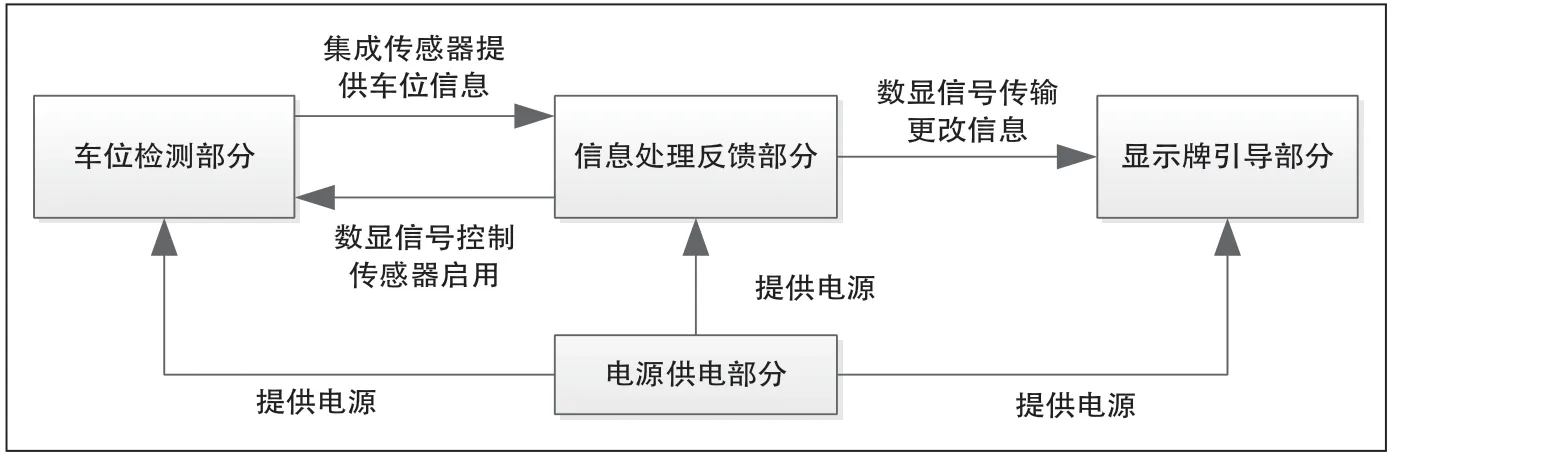
图1 总体系统设计流程图
1.2.1 车位检测部分
由各单车位的磁感应检测器构成的集合体,通过信息处理反馈部分单片机程序,划分成N 个控制区域,减轻信息处理反馈部分压力。当车位有车辆进入后,该车位检测器发射的0 信号改变为1 信号,传输至单片机处理过后信息传输到显示牌。需要检修的特定车位,由反馈信息发射0 信号控制单车位检测器信号始终为0,实现特定车位不使用,不干扰系统程序判断。
1.2.2 信息处理反馈部分
内部程序通过89C52 单片机进行编写,其程序核心内容由三大部分构成:
一是区域空余车位数检测,通过接收车位检测部分信号,将运行检测结果通过数显信号传输至特定区域的显示牌达到外部式引导的核心目的;
二是控制器集成程序,将各车位检测部分的传感器集成体电路进行区域划分,与区域中引导显示牌结合;
三是车位启用程序,在信息处理部分外部输入口控制车位检测部分信号关闭,特定位置车位检测器实现检修、预定等局部控制的功能。
1.2.3 显示牌引导部分
由四种类型的数位显示牌和控制信号灯共同组成:
①安装在特定区域部分的提示引导车牌,接收信号后,显示该控制区域空余车位数。当控制区域位满时,信号灯由常绿变为常红,引导车位继续行驶。
②为放置在停车场上下层处数位显示牌,该数位显示牌由下层单片机处理反馈部分控制,对下层空余车位进行计数。
③为入口处数位显示牌,对停车位内所有车位数进行计数,判断停车场能否继续容纳车辆,达到车位实时信息传输和引导的目的。
④位于停车场道路交叉口死角,显示牌内含方向指示器,显示距离该牌最近控制区域。
1.2.4 电源供电部分
选用接入380V 工业电压,为系统提供稳定的电压源。通过2200W 电源逆变器和电子点火变压器控制,为每个部分通过不同且稳定的电源。
■1.3 系统大致工作情况
当有车辆进入停车场时,流程如图2 所示。停车场入口处,显示空余车位数,车主在辨别空余车位数后进入停车场,若入口处车位空余数为0,停车驾驶汽车第一时间离开。车主进入停车场后,观察各划分区域内空余停车位数,选择区域进行进入,通过绿灯指示灯前往空余车位。红灯代表该区域位置已满,通过指示灯,前往其他区域。当该层区域已满时,指示灯为全红,驾驶员控制车辆前往下层停车场。下层停车场入口处统计显示空余车位数。车主获取下层信息后驶入下层空间,进行泊车。最终完成泊车达到行驶路径无重复的效果。
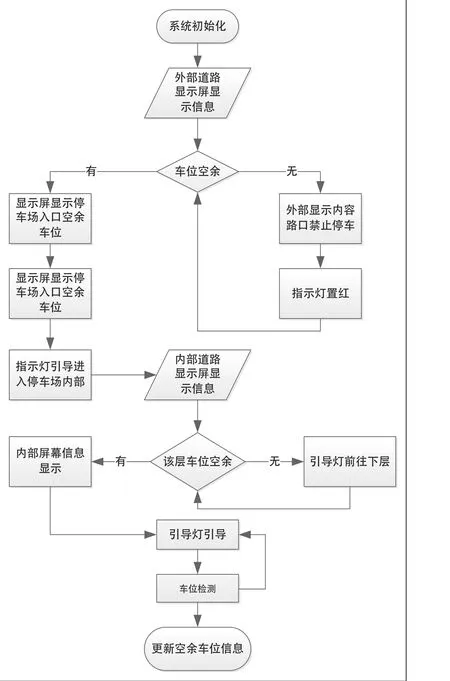
图2 系统流程图
本系统通过单片机控制,将停车场每层按照停车位数划分为N 个控制区域。单个控制区由单个单片机控制引导牌,每层入口处由单片机收集各区域单片机信息后控制层引导牌。停车场入口处单片机收集各层数据最后控制入口引导牌,如图3 所示,引导牌位于停车场道路上方,在四边形定义区域双向环绕分布。引导牌显示该环绕定义区域空余车位数,信号指示灯位于指示牌右侧。状态分别为置1红灯禁止和置0 绿灯可以通行两种。
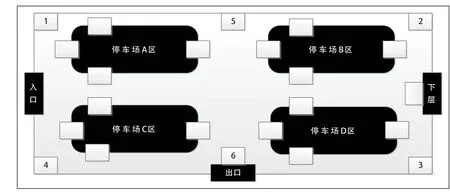
图3 停车场引导牌布局图
对停车场进行模拟,设置停车场仅有4 个规划控制区域。
当车辆入口进入后会出现以下情况:
①当ABCD 指示灯均置0,引导指示牌显示车位数,用户根据实际需求随意选择停车位。
②当ABCD 指示灯有一位两位或三位停车场置1,其余置0,123456 引导指示灯不工作。由控制区域内引导牌显示车位数,置1 停车场,指示牌内容显示为指向箭头,就近有空余车位停车区域。
③当ABCD 指示灯均置1,则启动123456 指示灯。当位于停车场底层其内容为指示箭头指示停车场出口位置。否则指示箭头指示停车场下层位置。下层指示牌开放,下层空余车位数。指示灯置0。
④当ABCD 均置1,下层未满时,停车场入口关闭。入口处指示灯显示为0,停车场内部12345 指示灯指示箭头指向停车场出口位置。
2 子系统组成
■2.1 显示牌引导部分
显示屏引导部分其目的在于引导驾驶员查看显示屏数据,通过引导指示灯引导驾驶员进行泊车操作。显示牌引导部分作为外部介入式系统核心部分,共有四种指示牌类型。通过指示牌精确指示达到,达到泊车引导智能化的效果。
显示牌引导部分,由四种类型的数位显示牌和控制信号灯共同组成,其一安装在拟定划分的停车区域内。功能为显示该拟定划分的停车区域的空余车位数。其二安装在停车场行驶道路口上方,该处显示屏显示离该显示屏最近停车场区域空余车位数和前往该区域的指示箭头。其三安装在停车场上下两层和停车场入口处,该显示屏显示下层上层空余车位数或停车场总空余车位数。其四安装停车场外路口处,其显示内容为禁止路口停车、该停车场空余车位数、指示方向箭头。
通过该四种显示屏,实现①车辆预驶入停车场时知晓空余车位数,无车位时能够直接驶离;②车辆能够提前知晓路口禁止停车。通过交警部门监察,实现路口无违停;③车辆进入停车场后能够指导,哪个区域内有车,能够第一时间获取前往该区域的方向;④车辆进入区域后,能够通过指示灯第一时间寻找到停车位。最终通过指示牌精确指示达到泊车引导智能化的效果。
根据付裕[4]文所述要求,为便于美观和查看显示牌引导系统均采用40×160 的LED 显示牌,右侧为200 型WDM-JD200-01-RG 红绿灯双色合一的停车场区域内指示灯,该指示灯优点在于拥有着高亮度灯珠,具有良好的可视效果,采用L 形状的支架能完美贴合停车场内壁。如图4所示,LED 显示牌阵列仅当显示未满和位满两种状态,指示灯根据LED 显示状态控制通行或禁止通行。

图4 停车场显示引导牌
■2.2 车位检测部分
车位检测部分运用应时彦[5]提出设想,运动电磁式传感器进行停车位检测。通过电磁效应,检测停车位未满,该设计的有着检测成本低、易于更换、耐用性强的特点,便于停车场内大面积普及,电磁式传感器易于购买,能快速地对车位进行改装,可忽略检测器成本。
■2.3 信息处理反馈部分
如图5 所示,该信息反馈部分共分为四大控制级别。
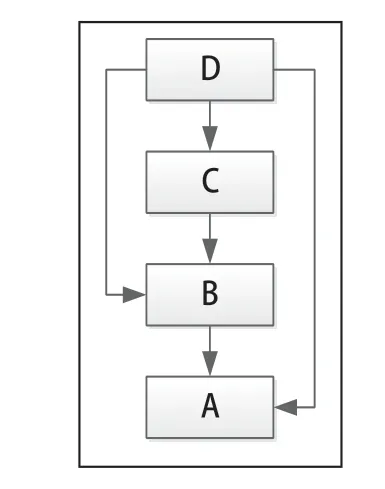
图5 控制流程图

图6 攀贸购物中心与停车场位置地图
A 为最高优先级一级,为车位控制仅实现检测停车位功能;B 为二级为区域内控制,区域内停车位汇总统计与显示,受到D 四级控制级别控制,仅影响该级别空余车位增加或减少;C 为三级层间控制通过收集汇总二级车位控制信息,控制层显示牌显示车位数,受到D 四级控制;D 为系统内调控,通过外部输入控制层内区域关闭,区域内车位数关闭,停车场开放关闭等功能。
3 系统验证
■3.1 复杂路段停车场选择
炳草岗街攀贸购物中心地下车库位于炳草岗街与文畅岗交汇处。该T 字形交叉口,炳草岗街道为东西走向,文畅路口为南北走向,文畅路向攀草岗方向街道为双向单车道,设计车道宽度仅为3.5m。该T 交汇口向南文畅路方向行驶为小吃街,因此主干道上右转行人与车辆较多;攀草岗街道为双向双车道,沿着炳草岗大街方向上左右两边有攀枝花攀茂购物中心和攀枝花市中心广场,导致该路段车流量较大。若有车辆在该拐角位置进行停车,则外部车辆无法进入停车库,内部车辆无法驶出停车场。停车违停时间不断加长,最后就导致车辆在停车场出口处排队。最后停车队伍沿着到路口,在路口排队,最后堵塞交通。
■3.2 仿真验证
为了分析停车场对路口的影响,对该路口进行交通流特性调研。
根据调研信息作为模型创建信息,通过Vissim 仿真软件创建该路口停车仿真模型。模型反映出停车场路外拥堵长度与路口拥堵率与停车场进口速度成正相关,该设计显著优化了停车场,不会再产生因停车场问题导致的路口排队问题。通过Vissim 软件将优化后的路外排队长度带入仿真模型,经过模型自行演化得出系列优化后数据。优化后模型对比平面图如图7 所示。
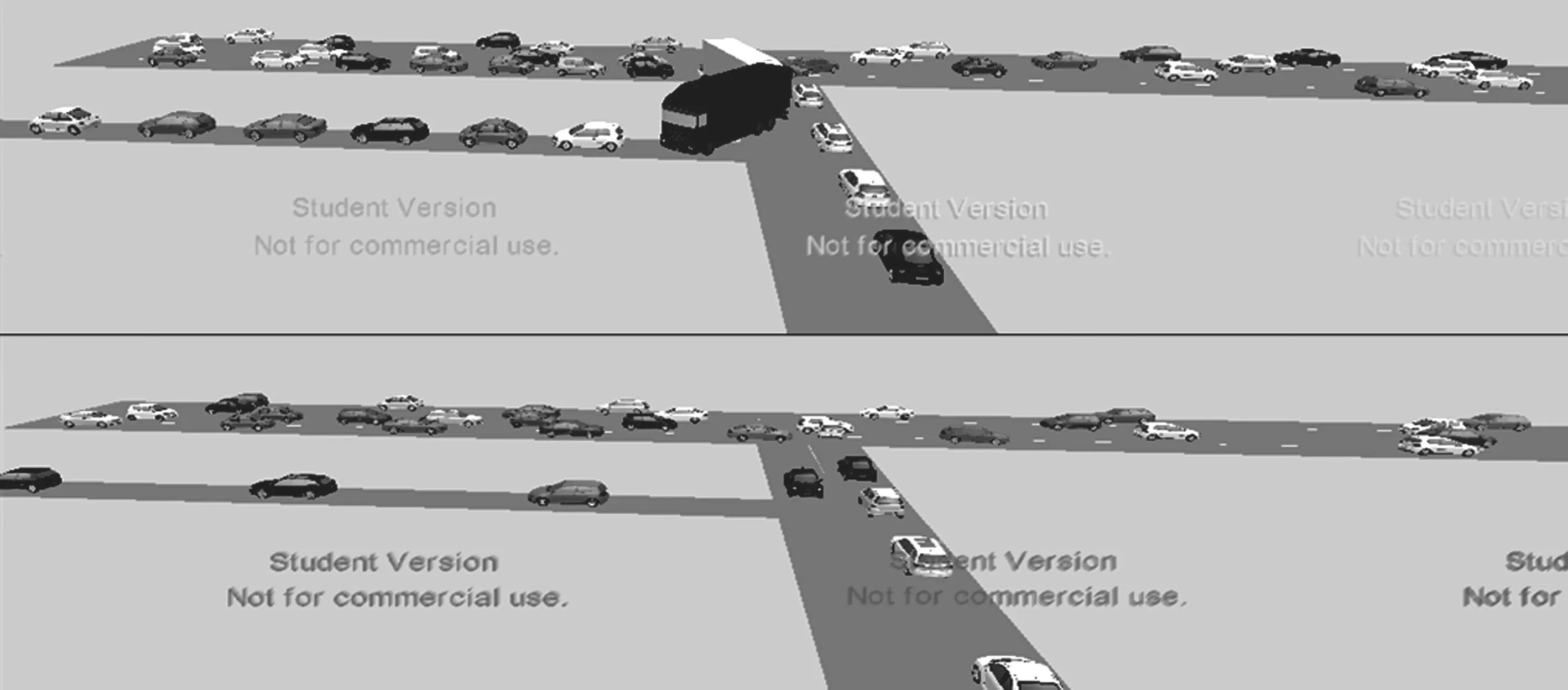
图7 炳草岗大街T 型路口停车优化前后3Dvissim 仿真对比图

表3.1 Vissim仿真数据对比表
从该路口调研数据使用VISSIM 软件进行交通仿真模拟,建立停车场仿真模型进行评测。结果表明,停车场设计改造后大幅度改善了该路口的停车场排队问题,路口拥堵率有了显著的下降。证明了本设计为该社会问题解决提出一种可行有效的办法。
4 结语
本文所研究的外部介入式系统,通过单片机与数模显示屏的逻辑编程结合,可以应用于停车场设施市场中,实现快捷式引导。全部采用内接式电路,从而避免了网络信号造成的停车场困境,易于改造、使用简单,能完美作为新智能时代停车场与旧时代车流量大停车场的过渡改造系统。
跟随引导快速停车,减少了寻找车位的时间,从而降低排队的概率,进而减少因为进入停车场路段与其他交汇路段形成排队的概率,提高该区域的通行率。
猜你喜欢
汽车实用技术(2023年10期)2023-06-14
领导文萃(2022年23期)2022-12-14
汽车实用技术(2022年19期)2022-10-19
汽车实用技术(2022年7期)2022-04-20
数学年刊A辑(中文版)(2021年4期)2021-02-12
东坡赤壁诗词(2020年4期)2020-09-02
军民两用技术与产品(2020年3期)2020-04-07
参花(下)(2016年6期)2016-06-12
航天返回与遥感(2014年4期)2014-07-31
百科知识(2014年11期)2014-06-10