
北斗二号设备在海洋工程中实验比对研究
2023-07-11 10:22王在峰王志超尹彦坤
全面腐蚀控制 2023年6期
王在峰 张 磊 王志超 尹彦坤
(1. 中海油信息科技有限公司,北京 100027;2. 中海石油(中国)有限公司海南分公司,海南 海口 570311)
0 引言
长期以来,在海洋工程导航定位领域得到广泛应用的是全球定位系统(Global Positioning System,GPS)设备,随着北斗卫星导航系统(下文简称北斗系统)逐步发展,北斗二号设备逐渐在海洋工程导航定位中占据了一席之地。尽管北斗系统已经发展到了北斗三号时代,但是由于设备更新换代需要时间,大量北斗二号设备仍在普遍应用中。现有的研究主要集中在对北斗系统与其他系统(或组合系统)的陆地静态观测数据进行对比研究[1-3],或利用特定网站已有观测数据对北斗/GPS组合系统定位精度进行进一步的评价与分析上[4,5],对北斗二号设备与GPS设备在海上实际应用中的导航定位性能研究不足。
本研究利用海洋工程现用的北斗二号设备和GPS设备开展了海上现场试验,分析了北斗设备和GPS设备获取的船艏向数据,并以GPS坐标为基准,对北斗系统的定位精度进行了比对分析。
1 试验
1.1 系统设计
目前,GPS系统在海洋工程导航定位领域应用最广泛的是高精度差分GPS技术,在近海海域,主要采用GPS差分定位技术,远海则采用GPS星基差分技术进行定位,本研究中海上试验地点在近海。
北斗海上动态导航定位技术主要有精密单点定位技术和载波相位差分定位技术两种[6],海洋工程导航定位作业主要采用载波相位差分定位技术,利用B1、B2频段载波相位观测值形成双差组合观测值,通过解算宽巷载波相位组合观测值的整周模糊度,进一步得到载波相位观测值的整周模糊度,从而计算出观测点的坐标,实现对观测点的动态定位[7,8]。
北斗系统由三部分组成,分别是空间段、地面段和用户段[9,10]。利用差分定位技术进行海洋工程导航定位作业时,系统组成可分为北斗卫星系统、地面差分站和船载终端。其中,北斗卫星系统为海洋工程导航定位提供基础服务;地面差分站用于对卫星数据进行解算,以获取高精度定位信息;北斗船载终端利用北斗卫星系统,为船舶提供实时高精度定位和导航服务。技术人员利用导航定位软件及设置在工程船舶上的显示屏,即可实时获取并观测各施工船舶的相对位置,并可便捷地设置导航定位参数,以便施工人员将工程船舶行驶至指定位置。
本研究中,选取一套海洋工程现用的北斗二号设备作为船载终端,在海上实际试验过程中,船载终端将导航数据传输至导航定位软件中。同时,利用一套海洋工程现用的GPS设备,同船开展海上测试。需测两套卫星系统单独解算的数据进行对比分析,即单北斗差分解算数据和单GPS差分解算数据。
1.2 设备及软件系统
1.2.1 主要设备
本次试验所采用的主要设备如表1所示。

表1 设备一览表
(1)北斗二号设备
北斗二号设备支持双天线进行定位测向解算,可广泛应用于海上施工定位、测深勘测、船舶导航等方面。北斗二号设备主要技术参数如表2所示,表2中:RTK(Real-time Kinematic Survey)为实时动态测量,DGPS(Differential Global Position System)为差分全球定位系统,SBAS(Satellitebased Augmentation system)为星基增强系统;

表2 北斗二号终端设备主要技术参数
(2)GPS设备
GPS定位定向仪主要技术参数如表3所示,表3中:CEP(Circular Error Probable)为圆概率误差,是GPS定位精度单位。GPS定位定向仪安装简单,两个天线安装在配置好的标准1m安装支架上。

表3 GPS定位定向仪主要技术参数
1.2.2 软件系统
本次北斗系统应用于海洋工程导航定位所使用的软件系统为自主开发系统,软件功能包括串口调试、船型参数设置、定位位置计算等。该软件可根据海上施工导航定位软件进行及时调整,它具有适应性强、开放性强,窗口简洁、友好,图标清新可人,操作方式人性化等特点。该软件可用于高斯-克吕格投影和墨卡托投影,系统内置北京54坐标系(BJ-54)、WGS-84大地坐标系(World Geodetic system -84)、WGS-72大地坐标系(World Geodetic system -72)等多种坐标系统。只需要在任务参数设置中选择所需的坐标参数,该软件系统便可以与任何坐标系统连接,是一套开放性很强的导航定位软件系统。
1.3 实地测试
1.3.1 陆地静态试验
为保证北斗二号终端设备在实际应用中获取数据的准确性与稳定性,在进行海上动态试验前,首先对该设备进行了系统兼容性及稳定性测试,陆地静态测试在陆上某地进行,测试方案如下:
将北斗接收机置于室内,北斗定位定向天线置于室外无遮挡处,确保天线能够接收到4颗及以上卫星信号,接收机与天线之间通过线缆连接(如图1所示),接收机通过线缆接入导航定位电脑。
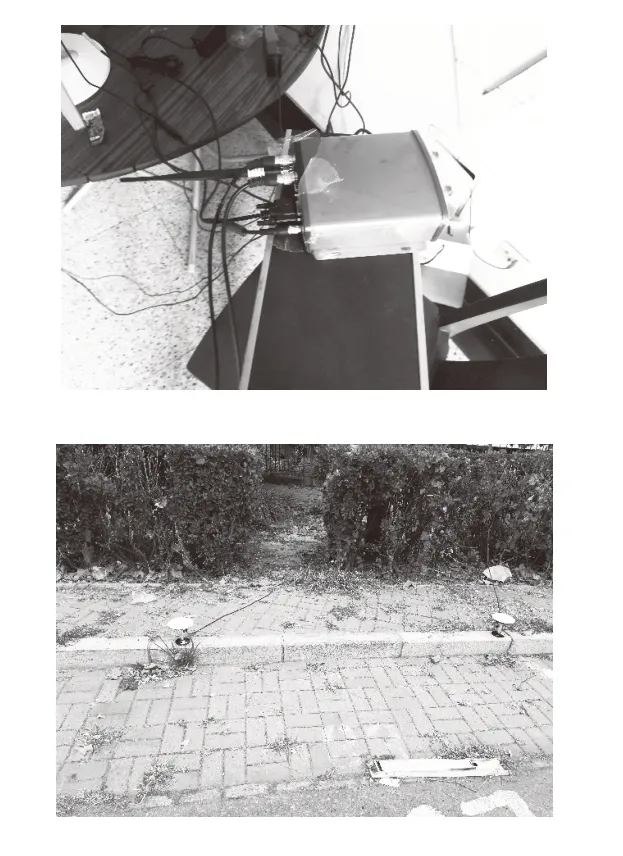
图1 接收机与天线陆地现场连接图(上图为接收机,下图为天线)
利用软件开展串口调试,根据接收机接入导航定位电脑接口的不同,对串口进行设置。串口调试窗口输出全球卫星导航系统(Global Navigation Satellite System, GNSS)数据,其中包含接收机的时间、位置及定位相关数据。测试过程中,软件能够接收到接收机发送的位置和航向信息,表明软硬件系统可以正常工作。
1.3.2 海上动态试验
选取近海某海域开展海上现场测试,将北斗、GPS设备及天线搭载至相关船只,出海开展数据采集实验。本次海上试验采用了动态差分定位技术,选取合适的路线进行测试,需测单北斗差分解算数据和单GPS差分解算数据。
(1)基线选择
一般而言,可利用卷尺等工具精确测量两天线中心之间的距离以确定基线长度,两天线中心之间距离的测量精度会直接影响到侧向的效果。由于海上导航定位作业的特殊性,天线难以固定以准确测定基线长度。为保证基线长度的精确性,需预先在陆地定制固定长度的基线,在进行海上导航定位作业时,只需将带有卫星天线的基线利用扎带固定于船舷或空旷处即可。
本次海上试验中,根据不同接收机型号使用不同的基线长度。对北斗二号定位定向接收机,使用2m基线;对GPS定位定向接收机,使用1m基线。基线设计如图2所示;
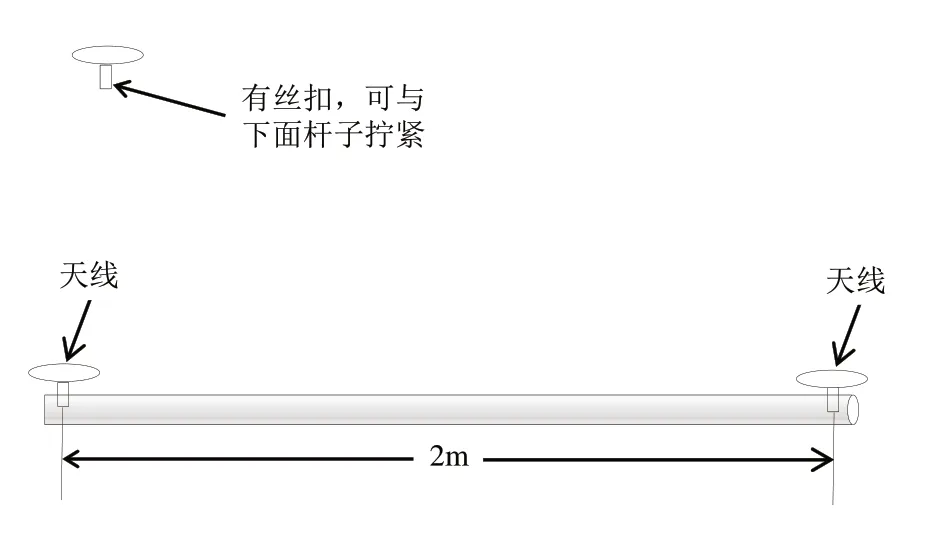
图2 北斗二号接收机基线设计图(2m基线)
(2)设备安装
本次海上试验中将卫星天线置于右侧船舷,GPS接收机天线的前端天线用于定位,后端天线用于定向,北斗二号接收机天线则与之相反,前端天线用于定向,后端天线用于定位,卫星天线安装位置见图3所示;

图3 北斗接收机及GPS接收机海上现场接线图
(3)定位点选择
受限于船体本身,北斗和GPS定位天线通常无法准确安装在船体需要定位的点,实际操作中一般选取船上容易固定、不易滑落且无遮挡的相对开阔区域作为天线的安装位置。在导航定位作业过程中,定位参考点的选取尤为重要,利用选取的固定参数,加上对应的船型参数,便可相对准确地解算出船体的位置和实际大小。
在导航定位过程中,为了使定位参数统一,一般会以船体为基准,虚拟出平面坐标系。在作业过程中以船尾的中点作为平面坐标系的原点,右舷方向为x轴正方向,左舷方向以x轴负方向,船头方向为y轴正方向,而坐标原点即为实际定位点。
实际操作中,需要对天线定位点进行坐标转换,通过坐标转换,得到船尾中点的实际坐标(大地坐标)。在作业过程中,导航定位电脑中显示的定位点即为船尾中点坐标。坐标转换示意图如图4所示,坐标转换公式(1)所示:

图4 北斗及GPS天线安装位置示意图
式中:Xp、Yp为定位点平面直角坐标(大地坐标);
X0、Y0为天线位置直角坐标(大地坐标);
xp、yp为定位点船型坐标(以船尾中点为原点);
x0、y0为天线位置船型坐标(以船尾中点为原点);
Hg为船艏向;
(4)软件设置
设备安装及接线完成后,需要在导航定位软件中进行警戒圆设置、定点导航设置和船型设置(主船设置、拖轮船型设置)。软件设置完成后,即可进行导航定位作业。本次海上动态试验只对拖船导航定位进行了测试,并以GPS定位数据为基准,对北斗系统导航定位数据进行了定位精度分析。
2 结果和讨论
2.1 船艏向对比分析
根据海上实测数据的分析可知,本次海上试验过程中,北斗设备和GPS设备获取的船艏数据均为偏西向(如图5所示)。船的实际航行轨迹为南偏西60°左右,而北斗设备和GPS设备测得的船艏向数据为偏西向,实际航行轨迹与测得的船艏向呈现约30°的夹角,这是由试验过程中风和洋流的因素引起的。

图5 北斗系统与GPS系统测得船艏向图
2.2 定位精度分析
北斗系统在海洋工程中的应用主要分为导航和定位两部分,其中,船舶导航对定位精度要求较低,而在浅海区域海洋石油平台导管架就位、上部组块的安装及重块位置确定等海洋工程定位领域,则对定位精度具有较高的要求。一般而言,在海洋石油领域,高精度定位作业一般要求精度控制在亚米级。
海上现场试验过程中,GPS所使用的坐标系统为WGS-84系统,而北斗所使用的坐标系统为CGCS2000(国家2000大地坐标系),这两种坐标可以通过导航定位转件进行自动转换,最终输出数据格式为WGS-84坐标。
选取北斗系统与GPS系统时间重合段进行分析,其中北斗系统获取数据频率为2s,而GPS获取数据频率为1s,即北斗系统每2s获取一组导航定位数据,GPS每1s获取一组导航定位数据。选取北斗与GPS时间重叠时段的航迹数据对北斗二号设备的定位精度进行分析,航迹数据误差分析表如表4所示。以GPS测量数据为基准点,表中Δx是北斗二号设备与GPS设备在x轴方向的定位数据差值,Δy是北斗二号设备与GPS设备在y轴方向的定位数据差值,t是时间。

表4 北斗设备与GPS设备航迹数据误差分析表
由表4可知,北斗设备与GPS设备横轴方向高精度定位误差范围是-0.18~0.27m,纵轴方向高精度定位误差范围是-0.17~0.14m,横、纵轴误差均在亚米范围内。
以GPS测量数据为基准点,北斗系统平均精度如式(2)所示。
试验结果表明,北斗二号设备既满足海洋工程拖船导航定位作业需求,也满足主作业船海洋工程高精度定位作业需求。
3 结语
北斗二号终端上市多年,出产量比较大,虽然已经进入了北斗三号时代,但是大量北斗二号设备仍在应用中。在对精度要求亚米级的实际海洋工程中,北斗二号设备已具备代替GPS设备进行导航定位的能力。利用北斗及GPS设备进行比对测量,可提高定位稳定性,降低错误率。
猜你喜欢
高技术通讯(2021年3期)2021-06-09
科学(2020年5期)2020-11-26
宁波大学学报(理工版)(2020年1期)2020-01-09
测控技术(2018年6期)2018-11-25
电子制作(2018年19期)2018-11-14
舰船电子对抗(2016年5期)2016-12-13
电子制作(2016年1期)2016-11-07
系统工程与电子技术(2016年4期)2016-08-24
海洋工程(2015年1期)2015-10-28
海洋工程(2015年1期)2015-10-28
