康复机器人上下肢协调主动康复运动控制系统设计
2023-07-10 13:12:28黄军芬郭乐意曹莹瑜宁浩强
医疗卫生装备 2023年5期
黄军芬,郭乐意*,曹莹瑜,薛 龙,张 杰,宁浩强
(1.北京石油化工学院机械工程学院,北京 102617;2.河南翔宇医疗设备股份有限公司,河南安阳 456399)
0 引言
脑卒中、脊髓损伤、下肢退行性关节疾病等神经系统疾病会导致肢体功能障碍[1],给患者的日常生活造成巨大的影响。相关医学研究表明[2],通过上下肢协调的康复训练能够有效地帮助患者形成新的神经网络通路,从而恢复运动功能[3]。神经损伤患者在不同康复阶段的康复训练方式不同。在早期康复阶段,患者肌力一般只有0~2 级,只能采用康复机器人带动患者进行上下肢协调被动的康复训练方式。在中后期康复阶段,患者肌力达到2 级以上,患肢具备一定的自主发力能力,此时,需要对患者的患肢进行一定量的抗阻训练,即主动康复训练,增强患者的肌力、平衡性以及对躯干的控制能力[4]。相较于被动康复训练,主动康复训练既要求各关节的运动轨迹满足要求,又要考虑给患肢提供阻抗力矩,以及根据患肢发力的外骨骼关节的速度调节柔顺性,因此,针对主动康复控制方法的研究需要考虑更多因素。鉴于康复机器人能够为患者提供经济、高效、多样化的康复训练[5],已具有较成熟的理论基础与技术支撑[6],通过康复机器人实现主被动康复训练成为目前的研究热点。
国内外围绕主被动康复需求开展了大量康复机器人控制系统的研究工作。如瑞士苏黎世联邦技术研究所研发的步态康复机器人Lokomat[7-8]、瑞士洛桑联邦理工学院研发的下肢康复机器人Motion Maker[9],其控制系统仅能够带动患者进行下肢被动和主动康复训练。国内东北大学研发的下肢协调被动康复训练机器人控制系统[10]实现了基于步态数据库的下肢协调被动步行康复训练控制。美国Nustep 公司研发了一款上下肢协调主被动康复机器人[11],其控制系统能够实现坐姿下的上下肢协调康复训练控制。国内江南大学[12]、合肥工业大学[13]也对基于坐姿的上下肢协调康复训练机器人控制系统开展了有益探索。由此可见,目前外骨骼运动康复机器人控制系统的研究主要围绕下肢步态康复训练展开,而对于上下肢协调主被动康复训练控制系统的研究多是针对坐姿下的康复训练,上下肢各关节运动角度相对于正常步态运动存在差异,在一定程度上限制了康复效果[14]。
人体在行走过程中,上下肢各关节主要在矢状面上以关节横轴为中心做旋转运动[15]。考虑到神经损伤患者的运动局限性,在躺卧姿态下实现上下肢关节正常步态运动的协调康复训练控制,有助于患者恢复平衡能力以及对躯干的控制能力。因此,本文基于外骨骼式康复机器人实验平台研究躺姿条件下的上下肢协调主动康复运动控制系统,使得上下肢关节康复训练运动角度更加贴合正常步态运动。
1 康复机器人上下肢协调主动康复运动控制系统方案设计
外骨骼式康复机器人实验平台如图1 所示,包括机器人本体和上下肢协调主动康复运动控制系统两部分。康复机器人实验平台本体机械结构设计符合人体结构特点,对应人体肩、髋、膝等关节处安装直流伺服电动机和扭矩传感器,能够带动人体的肩、髋、膝关节在矢状面上进行上下肢协调康复训练。根据对人体上下肢协调运动轨迹的分析,设计的康复机器人上下肢协调主动康复运动控制系统硬件结构如图2 所示。
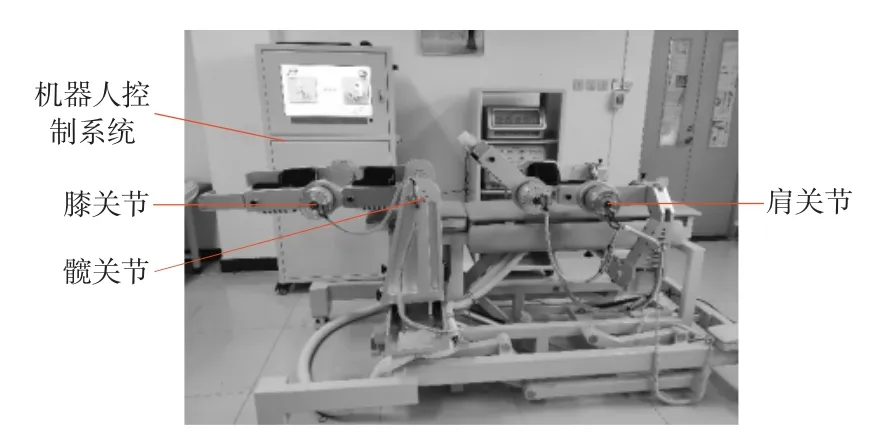
图1 外骨骼式康复机器人实验平台

图2 康复机器人上下肢协调主动康复运动控制系统硬件结构框图
康复机器人上下肢协调主动康复运动控制系统由上位机控制系统,运动控制器,肩、髋、膝等关节的伺服驱动器组和伺服电动机组以及扭矩传感器等组成。其中扭矩传感器采用FCT 盘式超薄静态扭矩传感器,运动控制器选择禾川的Q1 控制器,伺服驱动器选用Kaiser 伺服驱动器。Q1 控制器能够通过EtherCAT 总线同步控制多个伺服驱动器,从而控制多个直流伺服电动机,实现多关节的协调控制。系统硬件配置如图3 所示。
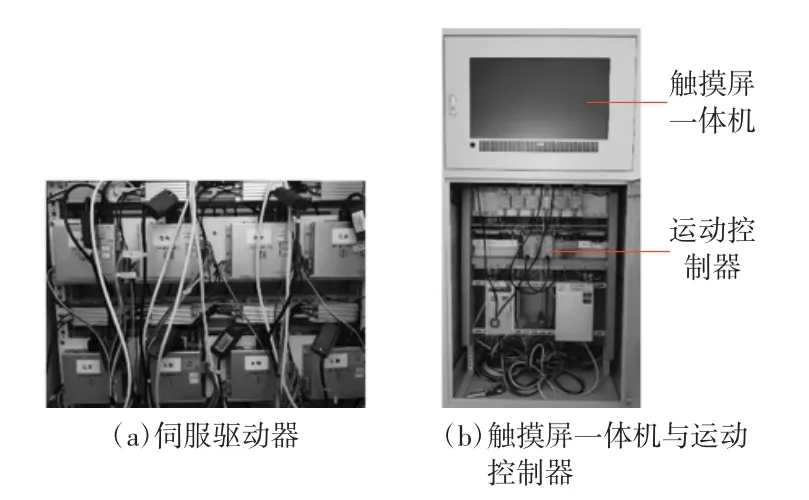
图3 康复机器人上下肢协调主动康复运动控制系统硬件配置
2 上下肢协调主动康复训练控制方法
在中后期康复阶段,康复训练在引导患者四肢依照步态数据进行协调运动的基础上,应该能够给患者的患肢施加阻抗扭矩,实现患肢带动健肢的上下肢协调抗阻训练。
上下肢协调主动康复训练控制策略是针对患肢采用耦合阈值控制的导纳控制方法实现满足柔顺性要求的抗阻训练,采用模糊比例-积分-微分(proportional-integral-derivative,PID)控制方法实现各关节基于步态数据的协调运动控制。
康复机器人上下肢协调主动康复运动控制系统提供的主动康复训练主要包含以下几个步骤:根据康复医师的诊断和建议,判断患者患肢的肌力,为患者制订相应的处方,并根据处方在控制系统中为患者设定阻抗扭矩阈值;计算出患者的患肢对应关节与外骨骼之间的实际交互扭矩,若交互扭矩达到设定的阻抗扭矩阈值,表明患者有明显运动意愿,则康复机器人依据步态数据带动患者进行上下肢协调康复训练,若实际交互扭矩低于设定的阻抗扭矩阈值,表明患者不想继续康复训练,则康复机器人停止康复训练过程。
2.1 步态轨迹数据
为了实现上下肢协调的主动康复训练[16],需要以正常人的步态数据为依据对康复机器人进行运动轨迹规划。临床步态分析标准步态数据库[17]提供了正常人髋、膝关节在一个步态周期下的角度数据信息。同时,根据人体步态运动规律,肩关节的运动轨迹接近于正弦函数,步行中的最大伸展角度为20°左右,最大屈曲角度为15°左右。肩、髋、膝关节协调运动步态数据如图4 所示。
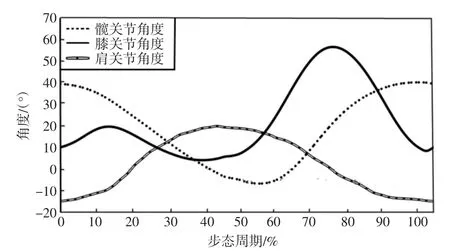
图4 肩、髋、膝关节协调运动步态数据
2.2 结合模糊PID 控制的主动康复训练导纳控制方法
在上下肢协调主动康复训练过程中,对于患肢训练的阻抗扭矩、各关节在步态周期的运动轨迹和运动的柔顺性都有一定要求。康复机器人上下肢协调主动康复运动控制系统通过图5 所示的结合模糊PID 控制的导纳控制方法满足相应控制要求。

图5 结合模糊PID 控制的主动康复训练导纳控制示意图
图5 中设定关节角度θd即为关节步态数据,通过导纳控制实现关节运动角度修正,保证主动康复运动过程的柔顺性。导纳控制中耦合了阈值控制以实现抗阻训练(阻抗扭矩阈值为Fd),通过模糊PID控制实现关节的运动轨迹控制。导纳控制输入为人机交互扭矩Fr,输出为关节角度修正值θf,由于扭矩传感器采集到的扭矩数据融合了康复机器人外骨骼自身负载扭矩,所以要解耦计算出人机交互扭矩Fr,Fr=F传-F负,其中F传表示康复机器人关节处的扭矩传感器所测得的扭矩值,F负为康复机器人外骨骼因自身的重力、位置、速度等产生的自身负载扭矩。仅当Fr≥Fd时,才能开展患者患肢带动健肢的上下肢协调康复训练。模糊PID 控制输入偏差E=θd-θf-θ,其中θ 为通过康复机器人关节伺服电动机的编码器获取的运动关节实际角度值。
康复机器人外骨骼自身负载力矩F负与关节的实时角度值θ、外骨骼的质量、转动惯量等属性相关,可通过逆动力学算法计算获得。外骨骼逆动力学方程如公式(1)所示:
通过将Fr代入到导纳控制模型可获得康复机器人各个关节的角度修正值θf:
式中,M 为惯性系数;B 为阻尼系数;K 为刚度系数;s 为拉普拉斯复变量。通过合理设置这些参数,便可实现康复机器人各关节运动的动态柔顺控制。由于肩、髋、膝关节的质量、质心以及运动轨迹不同,所以导纳控制模型的参数也不同,需要单独设定。
模糊PID 运动控制方法实现过程如下:将设定关节角度θd与实际关节角度θ 和角度修正值θf作差获得角度偏差E,计算角度偏差E 的变化量EC,将E 与EC通过模糊化、模糊推理和去模糊化获得PID运动控制器初始参数值Kp'、Ki'、Kd'的修正系数ΔKp、ΔKi、ΔKd,最后通过公式(3)对PID 运动控制器进行实时调参,获得新的PID 运动控制器的参数Kp、Ki、Kd,实现对康复机器人运动轨迹的精确控制。
2.3 上下肢协调主动康复训练控制方法
上下肢协调主动康复训练控制方法如图6 所示,针对肩、髋、膝各关节进行主动康复运动控制,实现各关节的柔顺步态运动。图中导纳控制器即为图5 中结合模糊PID 控制的关节主动康复训练导纳控制,控制器的输入为图4 中肩、髋、膝各关节的步态数据,输出控制信号控制关节伺服电动机执行步态轨迹运动,通过导纳控制中耦合阈值控制,辅助控制系统实现抗阻训练功能。
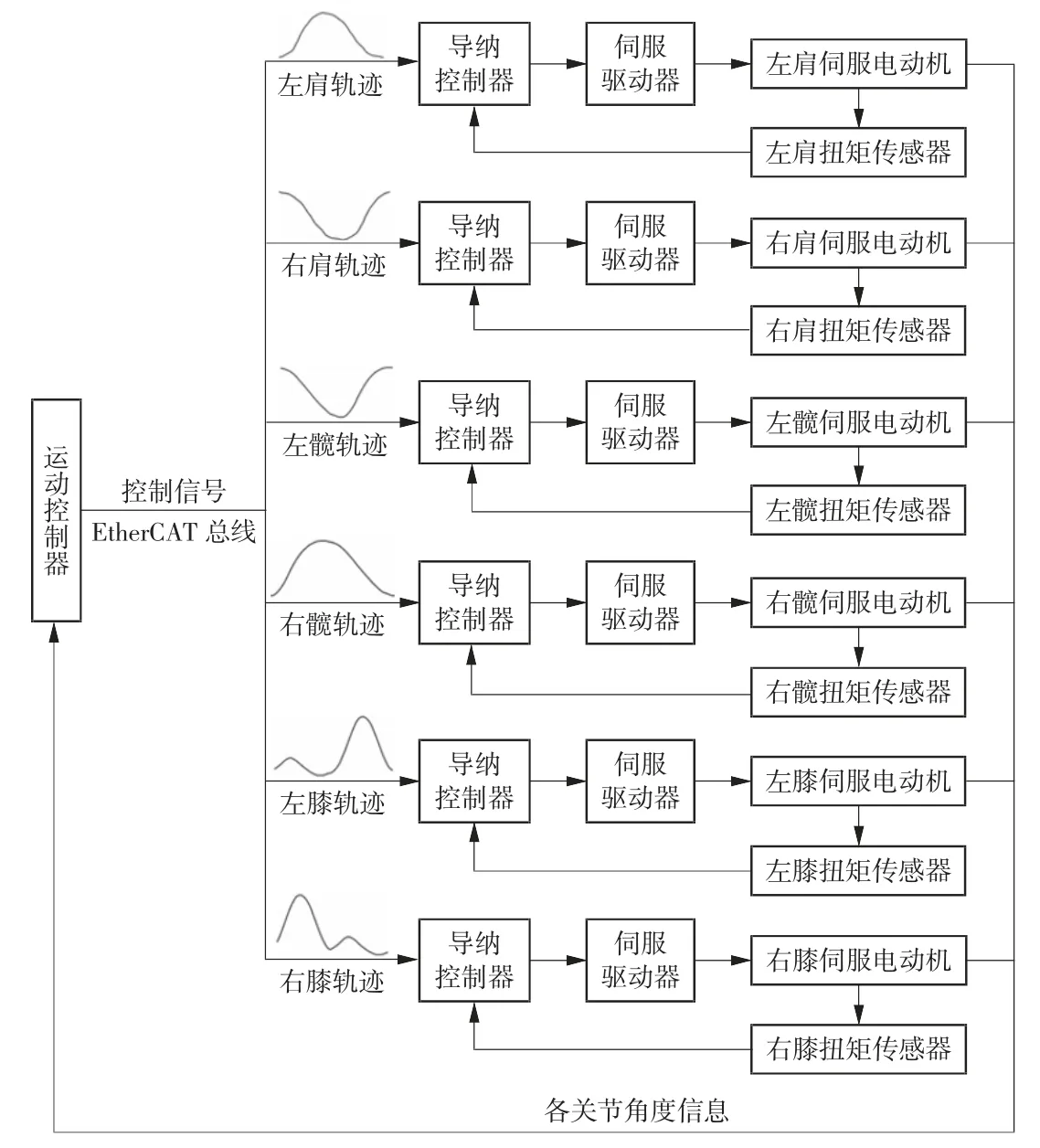
图6 上下肢协调主动康复训练控制方法
3 临床实验验证
本研究在某医院采用本文设计的康复机器人上下肢协调主动康复运动控制系统开展了为时5 个月的临床实验。针对肌力达到2 级的患者,进行患肢带动健肢的上下肢协调主动康复训练,根据患者康复情况,可以选择不同的阻抗扭矩阈值进行康复训练,每次训练10 min,每周5 次,康复训练场景如图7 所示。

图7 康复训练场景
3.1 上下肢协调主动康复训练实验
在上下肢协调主动康复训练中,步态速度为每秒7%步态周期,步幅为正常步态,设定的阻抗扭矩阈值为3 N·m,采用左肩发力带动康复机器人辅助进行上下肢协调主动康复训练,并对设定参数下的一个步态周期中各个关节的康复训练运动轨迹进行分析。
图8~10 为肩、髋、膝各个关节在一个步态周期内的康复运动轨迹曲线。可以看出,各个关节能够按照设定的步态轨迹数据进行上下肢协调康复训练,并且当左肩在60%~80%步态周期内施加的交互扭矩绝对值小于3 N·m 时[(如图11(a)所示],肩、髋、膝各关节的康复训练运动过程均停止,之后当施加的交互扭矩绝对值增加到3 N·m 以上时,康复训练运动过程继续,验证了控制系统的上下肢协调主动康复训练功能。

图8 肩关节临床实验运动轨迹与设定步态轨迹

图9 髋关节临床实验运动轨迹与设定步态轨迹
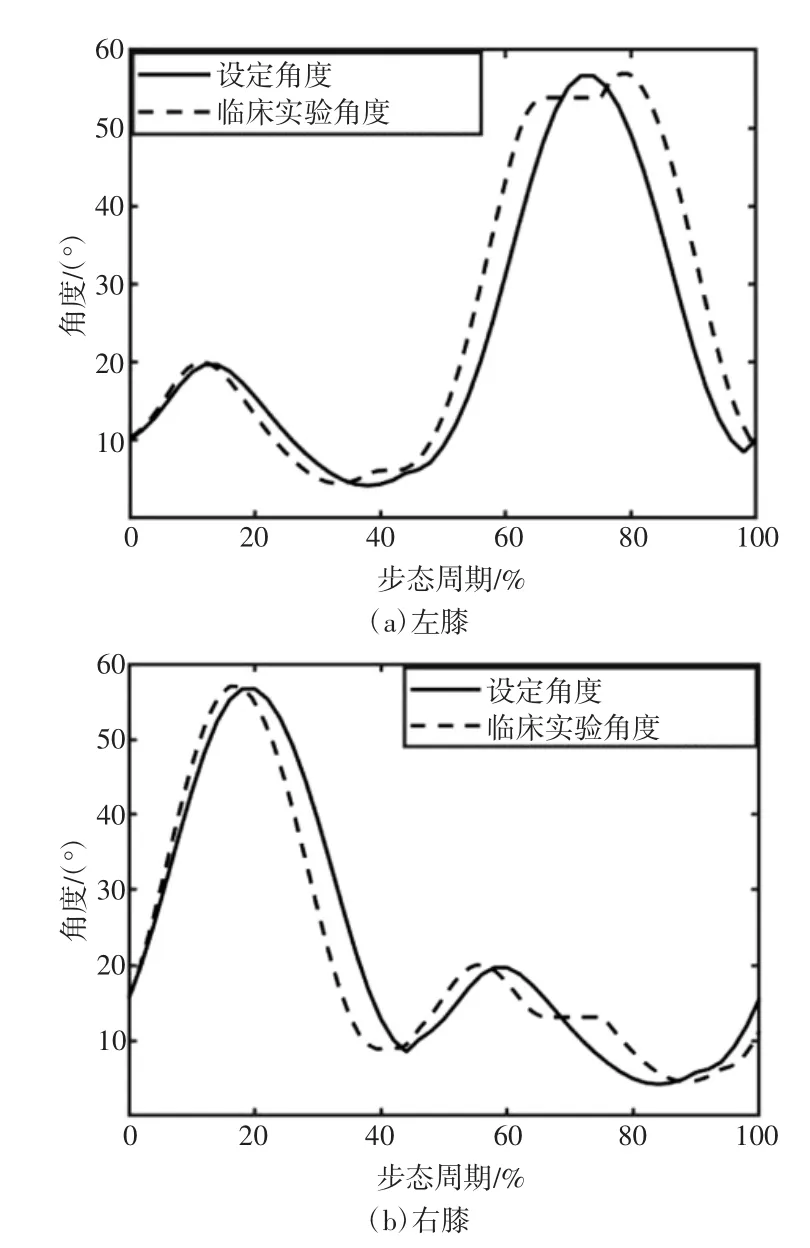
图10 膝关节临床实验运动轨迹与设定步态轨迹
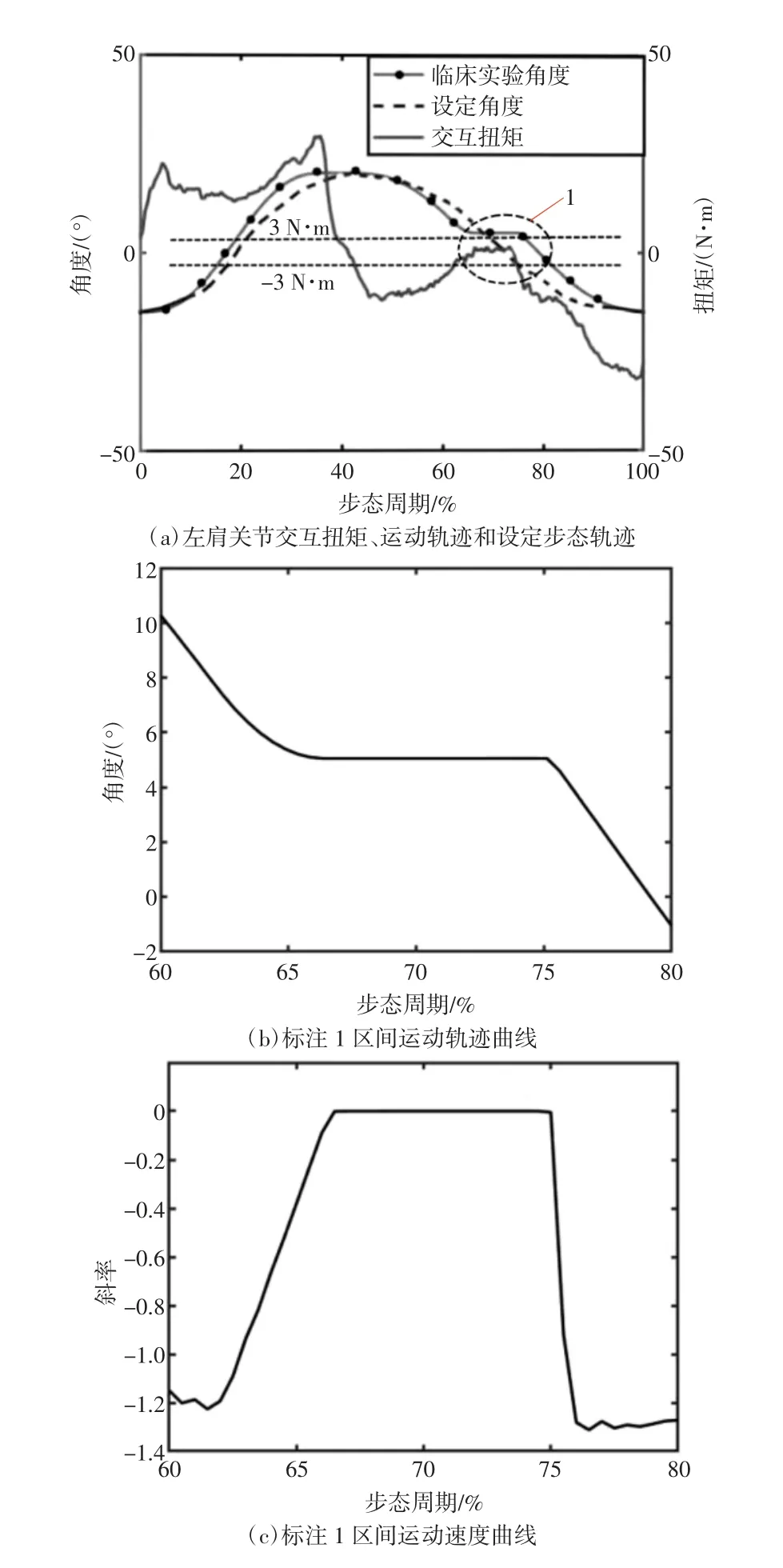
图11 左肩主动康复训练柔顺性分析
对临床实验中左肩关节运动轨迹的进一步分析(如图11 所示)表明控制系统具有较好的柔顺性。由图11(c)可见,当交互扭矩绝对值低于3 N·m 时,左肩关节伺服电动机转动速度的绝对值下降有一个渐变过程,带动患者逐渐停止运动,避免了电动机骤然停止产生较大的对抗力矩而对患者产生的不利影响;当后续交互扭矩绝对值大于3 N·m 时,康复机器人在识别患者的运动意图后重新启动康复运动,此时运动速度绝对值增长较快,表明控制系统具有较高的灵敏度。
取10 组上下肢协调主动康复训练过程中肩、髋、膝关节的运动数据进行误差分析,确定各个关节实际运动角度与设定的步态数据间的误差均值和最大值的绝对值,详见表1。从表1 可见,各关节运动角度误差的最大值小于8°。本研究中关节运动角度误差最大值略低于赵君豪[18]的研究(10°以内),略高于李志强等[19]的研究(5°以内),但相较于李志强等[19]设计的单自由度坐姿下肢康复机构,本研究实现了上下肢多关节协调运动主动康复训练功能。
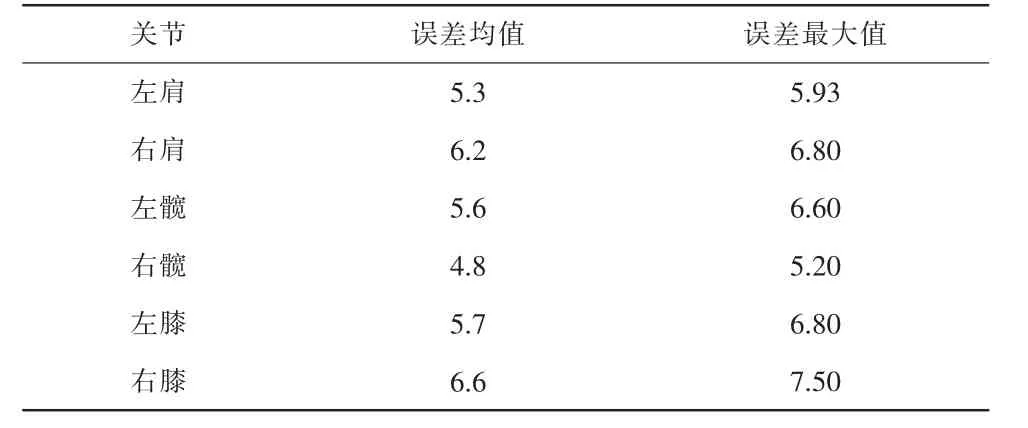
表1 各关节运动角度误差的均值和最大值 单位:(°)
从上述主动康复训练临床实验中各个关节的运动轨迹及运动角度误差分析可以看出,研究的控制系统能够帮助患者实现患肢带动健肢的上下肢协调主动康复训练,且具有较好的柔顺性,能够有效促进神经损伤患者的中后期康复。
3.2 康复效果分析
对患者康复训练前后各项能力进行评分:采用Lovett 评定标准对患者进行肌力等级评定,采用Berg平衡量表(Berg balance scale,BBS)对患者的平衡能力进行评估,采用Barthel 指数(Barthel index,BI)评定量表对患者的自理能力进行等级评分。患者的Lovett 分级、BBS 评分以及BI 评分的统计结果见表2。由表2 可知,经过一段时间的上下肢协调主动康复训练后,患者的肌力、平衡能力以及自理能力都有了明显的改善。通过以上患者康复训练前后的各项评估,验证了控制系统对神经损伤患者的康复具有非常好的辅助效果。
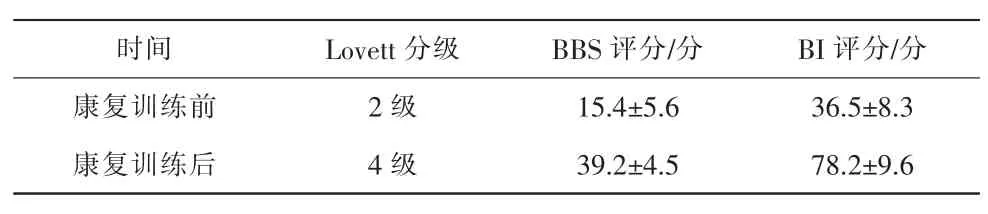
表2 患者康复训练前后Lovett 分级、BBS 评分及BI 评分统计
4 结语
本文设计了康复机器人上下肢协调主动康复运动控制系统,采用结合模糊PID 控制、阈值控制的导纳控制方法实现了基于步态数据的肩、髋、膝各关节的协调主动康复训练,并且在康复运动过程中体现出较好的柔顺性。通过临床实验验证了康复训练过程中各关节运动角度误差的最大值小于8°,表明本系统能够满足神经损伤患者在康复中后期的训练需求。临床康复效果的评估结果表明,上下肢协调主动康复训练对患者的肌力、平衡能力以及自理能力都有一定的改善。但设计的控制系统依据的步态数据来自于标准步态数据库,与患者实际步态运动轨迹可能存在一定差异,下一步需要进行更多针对患者的步态数据分析,以满足患者的个性化需求。
猜你喜欢
科学大众(2024年5期)2024-03-06 09:40:34
客车技术与研究(2023年6期)2023-12-19 01:21:18
昆明医科大学学报(2021年4期)2021-07-23 01:21:46
中国煤层气(2021年5期)2021-03-02 05:53:14
电子制作(2018年18期)2018-11-14 01:48:04
自动化学报(2018年6期)2018-07-23 02:55:42
中国学校体育(2018年5期)2018-05-14 15:46:17
凿岩机械气动工具(2017年3期)2017-11-22 07:21:50
新课程研究·教师教育(2017年3期)2017-05-26 11:20:50
华东理工大学学报(自然科学版)(2015年4期)2015-12-01 04:00:50