一种小型动物专用低压舱的研制
2023-07-10 13:12:40殷东辰王桂友于立华施维茹王丽萍
医疗卫生装备 2023年5期
殷东辰,王桂友,于立华,张 岩,施维茹,王丽萍
(空军特色医学中心,北京 100142)
0 引言
动物实验是现代医学研究中不可缺少的重要研究方法和手段,在超出人体生理极限的实验,需获得解剖组织的实验,以及有毒有害气体、试剂实验中,经常使用小型动物替代。据统计,在医学研究中约有40%的实验项目是通过动物实验开展[1]。动物实验不仅可避免医学伦理问题[2],还可进行各种生理极限以及有毒害结果的研究,且在组织难度、时间和成本上优势明显。动物实验以小鼠、大鼠、豚鼠、兔等小型动物最为常见,而专为此类小型动物设计的低压舱相对较少[3]。使用大型载人低压舱进行动物实验不仅耗费大、影响载人低压舱的正常职能任务,还存在病菌污染、消毒困难以及心理抵触等问题。本研究针对小型动物低气压实验的特点,研制一种满足动物实验特点的小型、低成本动物低压舱,以解决高原医学基础研究设备不足的问题。
1 方案设计
1.1 设计思路
动物实验一般以相对低的气压高度、长时间实验为主,实验时间可能持续数天、数周甚至数月,并可能对低气压环境下的动物给予不同体积分数的气体以观察实验效果,因此动物实验低压舱(以下简称“动物舱”)需对舱内气压高度、氧气和其他气体的体积分数进行手动或自动控制并显示,可自动维持在设定的气压高度以减轻人工负荷。动物在舱内饮食会有排泄物并产生异味,需考虑新风补充量及排泄物收集。为保证实验成功,设计上要充分考虑安全性、可靠性、精确度、可操作性和实时性。
1.2 工作原理
动物舱工作原理:使用真空泵通过流量调节阀将舱内气体抽出,外部空气通过手动调节阀进入舱内形成新风。舱体内部抽出气体流量和新风流量之间建立动态平衡,当抽出气体流量大于新风流量时舱内气压高度上升,反之舱内气压降低,两者相等时舱内维持预定的气压高度(如图1 所示)。考虑到建造成本和操作难度,本研究中气压高度的升降采用手动控制,当气压高度到达指定气压高度后通过一键式操作转换为自动模式,由单片机根据各传感器反馈参数自动控制电动调节阀,维持舱内气压高度不变。动物舱内氧气流量通过独立于新风系统的氧气管路供给,并使用电磁阀进行控制。当舱内氧气体积分数达到设定限值后,电磁阀切断氧气供给;当舱内氧气体积分数低于限值后,电磁阀打开,供给氧气。
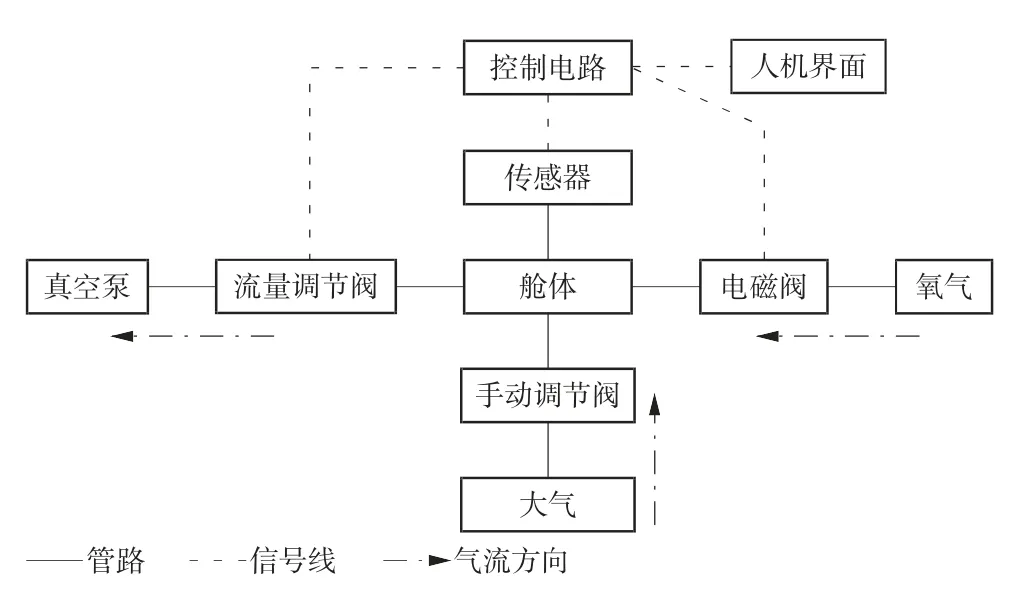
图1 动物舱工作原理
1.3 动物舱组成
动物舱包括舱体、动力系统(无油真空泵及附件)、传感系统(传感器组件)、逻辑判断系统(主控制板)和执行机构(流量调节阀、手动调节阀、电磁阀)等主要部分(如图2 所示),以及人机交互平台(用于操作控制)、液晶屏幕(用于显示舱内信息),按钮、开关元件若干,放置各系统的轮式小车。
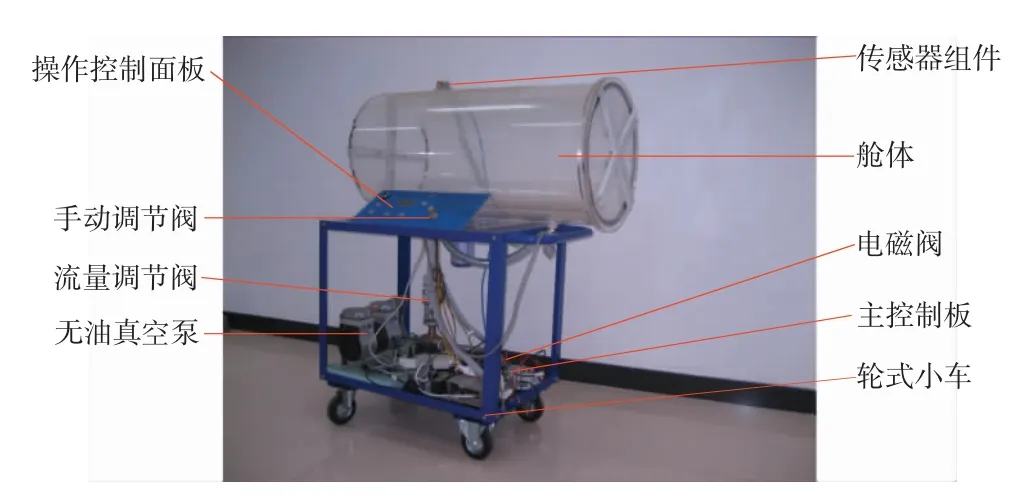
图2 动物舱组成
1.3.1 舱体
舱体的功能是将动物舱与外界环境隔绝,舱内气压低于外界环境气压,可以模拟不同海拔高度的大气环境。舱体上设置所需的气路和电器接口,为检测和控制系统提供必要的接口。
为便于观察舱内动物,舱体采用12 mm 厚透明有机玻璃制作,舱体为圆筒形结构,长度为800 mm、直径为500 mm,其一端密封,另一端为可拆式活动密封盖,密封盖设加强支撑梁。舱体下端使用支撑座保证舱体能够平稳地放置在水平面上。舱体内距离底端约150 mm 处安装置物横板,并在横板上打孔以避免动物饲料和排泄物堆积。
1.3.2 动力系统
动力系统主要由真空泵及配套的线路、开关、保险、气体管路等组成,主动力为一台无油真空泵,其功能是将舱体内部的气体抽出舱外,建立舱内负压。经过计算后选择某品牌V-1500 型无油真空泵,该型真空泵功率580 W,最大抽气量230 L/min,最大真空度-98 kPa(-25 mmHg),工作噪声≤68 dB。
1.3.3 传感系统
传感系统主要包括气压传感器、氧气浓度传感器和二氧化碳浓度传感器以及为其提供电源的驱动电路,其功能是作为闭环控制的信号测量端口,将动物舱内的气压、氧气体积分数和二氧化碳体积分数等物理量转化为电信号,为显示和控制动物舱的相关参数提供数据。传感系统的工作流程是首先对各传感器采集的电信号进行优化处理,然后将模拟信号转换成数字信号,最终提交给逻辑判断系统进行计算分析[4]。
1.3.4 逻辑判断系统
逻辑判断系统主要包括控制电路和控制面板。其中控制电路采集各个传感器的模拟信号进行A/D转换,结合输入的目标值进行分析计算后生成控制策略驱动执行机构,实现控制目标值。控制面板提供人机交互界面,供操作人员选择控制模式、设定目标高度和升降速度,并查看动物舱状态。
控制电路以ATmega16 单片机为核心,利用片上10 位A/D 接口采集传感器数据,其他I/O 口连接不同的按钮和LED 显示屏。LED 显示屏使用12864 液晶模块显示信息和操作提示。控制软件由C 语言编写,主要功能是对气体压力传感器、氧气浓度传感器和各调节阀门的位移传感器电压模拟量进行采集、计算处理;电动调节阀、电磁阀等执行机构的驱动控制;LED 显示屏、按钮等人机交互界面的显示和紧急情况的应急处理、报警(如图3 所示)。
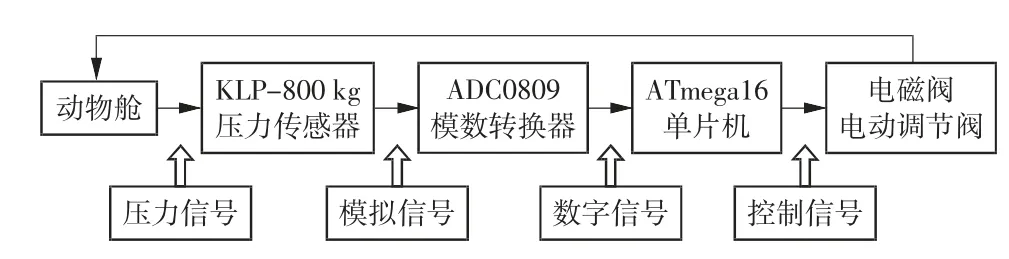
图3 逻辑判断系统工作流程图
1.3.5 执行机构
执行机构的作用是通过各种电动调节阀调节进入动物舱内的空气和氧气的流速及真空泵抽出气体的流速。主要包括:3 台电磁阀,用于控制氧气和新风通断;1 套电磁阀驱动电路,用于驱动阀门开启、关闭;5 套手动调节阀,用于手动调节各气路中气体的流通;1 套气体管路,用于连接各个零部件;电源、开关、继电器等若干组件为各个电动执行机构、控制电路、检测电路提供电源。
2 测试及改进
对动物舱进行总体调试后发现的问题与不足如下:
(1)气压高度维持阶段压力值波动范围过大。在最大新风量条件下,维持5 000 m 高度(54.20 kPa,20 ℃)压力值波动幅度接近10%,维持12 000 m 高度(19.38 kPa,20 ℃)压力值波动幅度则达到15%。(2)平面式舱盖无法承受大气压力(如图4 所示)。(3)噪声和震动较大。在距离设备1 m 处测试,噪声值为72 dB。

图4 平面式舱盖无法承受大气压力开裂示意图
针对实际应用中的问题与不足,采取了以下改进措施:
(1)压力值波动过大的原因包括:①控制气压高度调节的阈值设置简单;②不同新风量对调节气压高度的工作过程影响较大,且新风量过大也影响真空泵寿命[5]。解决方法:①对控制程序进行优化,对上升和维持气压高度阶段电磁阀阈值进行修正,将只检测1 次气压高度值改为检测前1 min 内的6 次气压高度的差值作为趋势判断,判断目前处于气压高度上升还是气压高度下降趋势;②将新风量固定在最大值,取消新风量手动调节功能。
经过程序优化后的动物舱在维持固定气压高度时波动幅度明显降低,达到设计要求,见表1。
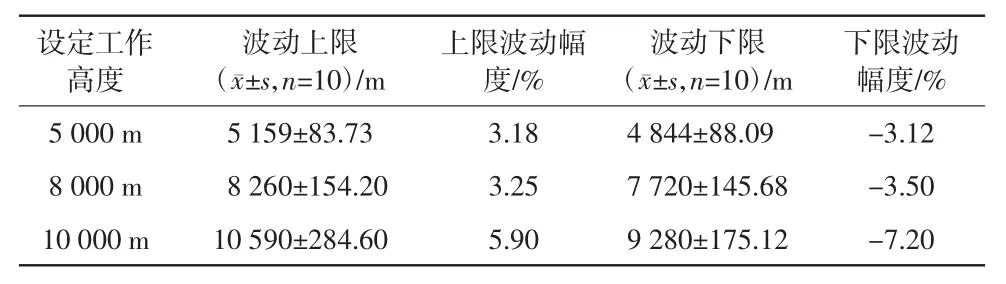
表1 程序优化后固定气压高度波动检测结果
(2)由平面式舱盖改为弧形舱盖以解决平面式舱盖无法承受压力的问题(如图5 所示)。
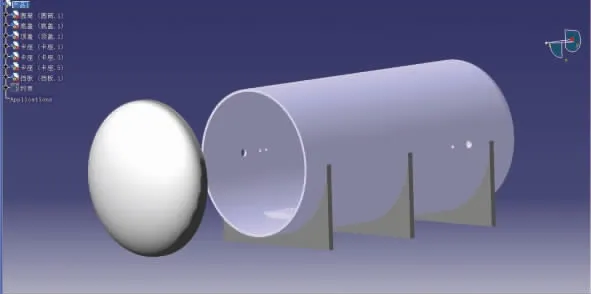
图5 改进后的弧形舱盖
(3)在动物舱底部加橡胶垫以解决真空泵噪声、震动大的问题,改进后噪声值降低至65 dB 左右。
改进后的动物舱各项指标均达到设计要求。
3 应用效果
动物实验舱交付使用后,各项功能达到设计要求:与单独置于舱内的独立测试装置比对校准,升降高度范围为0~12 000 m(101.33~19.38 kPa),其中0~8 000 m(101.33~35.71 kPa)时误差为±5%,8 000~12 000 m(35.71~19.38 kPa)时误差为±10%;升降速度为0~30 m/s(±1 m/s);舱内新风量为50 L/min(±1 L/min);氧气体积分数为0~30%(±1%)。
由此可看出,无人值守自动控制模式能够长时间维持在预定气压高度,显著减轻实验人员劳动负荷。使用高精度传感器—逻辑判断控制—执行机构的闭环反馈控制保证舱内压力控制精准。控制软件中使用趋势判断方法代替单一阈值节点,降低了气压调控波动幅度,保证了调控过程精准。
另外,针对动物实验的工作环境,在设计上所有接插件采用防水、防振、防松脱加固,保证了工作的稳定性和可靠性。
4 讨论
动物试验舱具有结构简单、工作可靠、成本低廉的优点。在同类密闭气压舱室的研制中,应关注以下几点问题:
(1)保持与使用人员的充分沟通。在充分理解使用人员需求的基础上,在设计与操作便利性之间寻求最优方案。本动物舱原设计中新风流量可调、可预设的程序化自动升降功能在工程设计上花费了大量时间和精力,但使用人员认为实用意义较小。
(2)压力舱体要充分考虑各部位承压能力。本动物舱初始设计为平面式舱盖,即便设计了加强梁依然无法承受大气压力而开裂,增加了研制周期。
(3)在设计上保留升级改造余量。本动物舱在设计阶段考虑未来升级可能,在传感器通道、管路布置等方面预留空白位置,同时使用模块化设计,可按照功能模块整体替换,便于今后的维修和改造升级。
经过设计、装配、调试和改进,本动物舱达到了最初的设计要求,可实现长时间无人监控条件下自动运行,并具备成本低廉、结构简单、操作便捷的优点。但是目前预设程序操作较为复杂,还应进一步简化操作步骤。此外,还应考虑增加监视摄像头,并开通远程网络监视和控制功能,以满足长期动物实验有关要求。
猜你喜欢
设备管理与维修(2022年21期)2022-12-28 07:34:32
仪器仪表用户(2022年10期)2022-09-29 04:36:58
仪器仪表用户(2022年9期)2022-08-30 05:39:48
水泵技术(2022年2期)2022-06-16 07:08:18
仪器仪表用户(2022年4期)2022-04-01 03:17:02
航天制造技术(2021年5期)2021-11-06 07:02:40
上海航天(2020年3期)2020-07-01 01:20:50
装备制造技术(2020年12期)2020-05-22 09:25:02
造纸信息(2019年7期)2019-09-10 11:33:18
石油化工自动化(2018年5期)2018-11-14 02:34:26