智能悬挂连接式巡检系统动态分析及工况仿真实验
2023-07-04 04:11:22丁一辛秦浩金甲杰张永梅王春辉
粘接 2023年4期
关键词:动态特性
丁一辛 秦浩 金甲杰 张永梅 王春辉
摘 要:由于高压线路地处偏远地区,日常巡检维护并不完善,一旦出现问题,可能会对高压线路造成巨大的损失。为有效提高高压线路巡检时工作效率问题,对悬轨巡检机器人在高压输电线路曲线段的运动机理进行深入研究分析,同时采用欧拉分析法构建巡检机器人运动组件的动力学建模,针对高压线巡检机器人的工作状态进行了研究。结果表明,所提出的悬挂轨道式机器人在平直状态下的震动最少,在攀爬状态下的震动最大,总体上工作平稳,能够实现对高压输电的高效巡检。同时巡检机器人在高压线路工作时的越障能力及稳定性较好。研究结果对悬挂轨道巡检机器人的研制具有指导意义。
关键词:悬挂轨道式;巡检机器人;移动结构 ;动态特性;隧道环境
中图分类号:TM743;TP39
文献标志码:A文章编号:1001-5922(2023)04-0192-05
Dynamic characteristic analysis and working condition experiment of intelligent control suspension connection patrol inspection system
DING Yixin1,QIN Hao1,JIN Jiajie1,ZHANG Yongmei2,WANG Chunhui3
(1.State Grid Anhui Electric Power Co.,LTD.,Hefei 230002,China;
2.Information and Communication Branch of State Grid Anhui Electric Power Co.,LTD.,Hefei 230061,China;
3.NARI Information and Communication Technology Co.,LTD.,Nanjing 210003,China)
Abstract:As the high-voltage line is located in a remoted area,the routine inspection and maintenance are not perfect,once there is a problem,it may cause huge losses to the high-voltage line.In order to effectively improve the work efficiency of the inspection of high voltage transmission lines,the movement mechanism of the suspension rail inspection robot in the curve section of the high voltage transmission line was carried out,and in-depth research and analysis were applied.At the same time,the Euler analysis method was used to build the dynamic model of the inspection robots motion components.The working state of the high voltage line inspection robot was experimentally studied.The test results showed that the proposed suspension track robot had the least vibration in the straight state,the largest vibration in the climbing state,and generally worked smoothly,and could achieve efficient inspection of high voltage transmission.At the same time,the inspection robot had good obstacle surmounting ability and stability when working on high voltage lines.The research results can provide guidance for the development of the suspension track inspection robot,and can further improve the safety of high-voltage lines.
Key words:hanging track type;inspection robot;mobile structure;dynamic characteristics;tunnel environment
近年来,随着我国用电需求量不断增大,高压线路巡检的工作环境存在的安全隐患,且部分高压线路地处偏远,巡检工作难度极大,因此进一步推动了人工智能技术和机械人技术发展,目前巡检机械人在高压线路的应用越来越广泛[1]。其中轨道式巡检机器人是高压线路应用最为广泛的一种[2]。因此,对悬挂轨道式智能巡检机器人进行研究具有重要的现实意义。
目前,国内外研究人员对高压线路悬挂轨道式巡检机器人进行了大量研究,并取得了许多成果:介绍了一种巡线机器人的设计方法,并对各个模块进行了具体的设计。针对多个轮子的运动特性,对多个轮子的运动特性进行了分析,并对其运动特性进行了研究。在此基础上,采用试验方法,研究了该机构在不同安装方式下的运动稳定性[3-5]。提出了一种 GIL智能巡检机器人系统,其集成了视频监控、仪器数据读取、红外热图像温度测量、局部放电巡检和定位以及环境巡检等功能。经检测,各项技术参数达到了苏通集团 GIL公司的每日检验标准[6]。本系统对其他GIL工程也有一定的借鉴意义,具有很好的推广与应用价值。但是,这些巡逻机器人存在着一定的局限性,其适应能力还需要进一步提升,为悬轨智能巡检机器人的研制奠定了基础。基于此,针对高压线巡检机器人,采用欧拉理论,对其各曲线部分的運动特征进行分析,并对其运动部分进行建模。采用试验方法,对不同工作状态下的智能巡检机器人进行振动特性研究。
1 智能系统的建模及分析
1.1 系统激励分析
柔性轮轨传输方法用于机器人检查高压线路破损及清理线路杂物的过程。通常情况下,激励不同产生的震动不同,文中仅考虑传动误差和啮合刚度激励引起的振动。
传递误差可由理论值和实测值等表示。为了简化计算,采用齿轮齿条传动替代齿轮齿轨传动,如式(1)[9]。
e(t)=e0+ersin(ωt+φ)(1)
式中:e0、er分别为齿轮啮合过程的平均误差和幅值误差。根据GB/T10095.1 ~ 2—2008,得到e0=0,er=11μm,文中传动设计相对简单,电机驱动轴将扭矩传递给齿轮[10]。传动误差近似为齿轮的极限偏差。ω=v/r,其中,齿轮半径r=46.5 mm、v=1m/s,代入ω=21.51rad/s;机械角φ=0。
啮合刚度是齿轮啮合时抵抗变形的能力,即引起单位位移所需的力,如式(2)所示[11]。
k=∑ni=1Fj/δpi+δgi(2)
式中:k、n分别为齿轮轨的啮合刚度和对数(通常n取1或2)[12];Fj为轮轨传动过程中的啮合力;δpi、δgi分别为驱动齿轮和固定齿条的变形量。
根据法国学者Velex提出的啮合刚度计算方法。极短长度处的啮合刚度值相等,根据ISO 6336公式,计算齿轮齿条平均啮合刚度k0,如式(3)所示[13]。
k0=cosβ0.8q(3)
式中:β为螺旋角(文中为正齿轮),其中cosβ值为1;q为柔度系数。经计算解得14.40 ,N/(mm·m)。
1.2 建立动力学数据模型
对行走部件在高压线路的振动特性进行了分析和计算,做了如下说明简化计算。
(1)旋转轮被认为是质量、弹簧和阻尼系统[14]。(2)转轮轮外表面的材料按橡胶计算。(3)忽略重力势能。通过对高压线路斜坡的行走部分进行动态分析来计算巡检机器人在高压线路爬坡时的振动[15-18]。基于以上假設,建立巡检行走部的动力学模型,在对行走部的巡检过程中,通过转轮在上、侧、下3个方向包围在轨道上,限制了行走部分的偏差。减少了行走部分的振动,运行平稳。
2 工况震动实验
2.1 直行轨道直行时震动实验
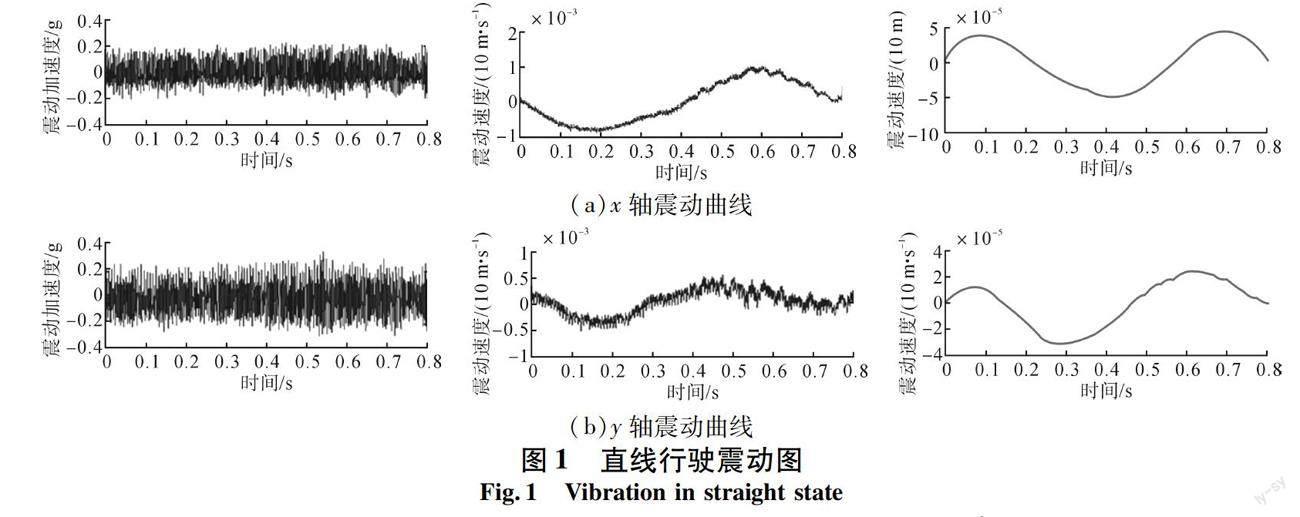
巡检轨迹为一条直线长度约800 mm的高压线路,直线高压线路巡检最大速度可达1 m/s。MyRIO中的三向振荡传感器在移动单元启动巡检时,将三向振荡信号采集到三向振荡信号,并与主机进行通讯。Cumrapz功能,可用来手工输入 Excel表格,用于对离散的数据进行阶梯积分,得到机器人在高压线路的线性振动图[19],具体如图1所示。
振动加速度、振动速度和振动位移是高压线路巡检机器人振动的重要参数,其中振动位移可以表征巡检机器人在高压线路的稳定性,且机器人稳定性越高,高压线路巡检工作越顺利,可以有效提高高压线路巡检效率[20]。
从图1 (a)的a3可以看出,沿着x轴的振荡分布被看作是具有0.4 mm幅度的一个正弦形的功能。从图1(b)的 b3可以看出,沿着 y轴线的振动分布被看作具有0.3 mm的幅度的一个正弦函数。2个方位的震动很小,几乎可以忽视。实验证明,当巡检机构以1 m/s的速率在高压线上作线性行走时,其震动偏移很少,工作平稳,不会对探测设备的探测效果产生任何的影响。
2.2 爬坡时震动实验
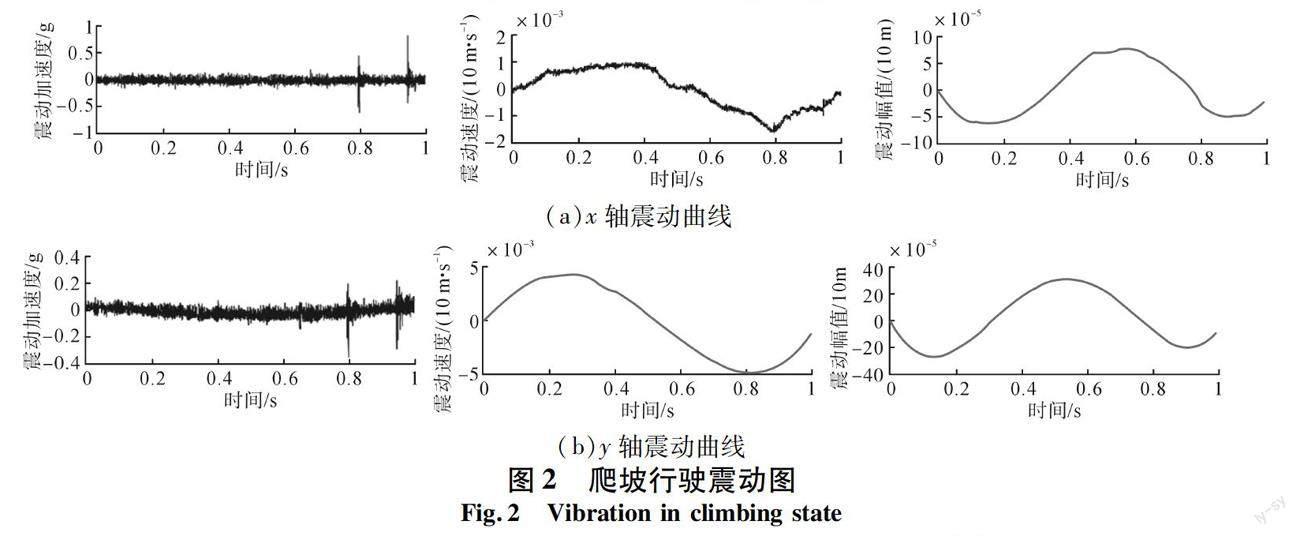
巡检机器人在高压线路巡检时,震动会影响巡检机器人的工稳定性。巡检机器人在高压线路爬坡时的震动分析同直线相同。对实验数据进行滤波后,进行振动分析。巡检机器人以1 m/s的速度爬30°坡时,行走部的振动图如图2所示。
从图2(a)的a3可以看出,在机器人沿高压线路上坡时,沿着x轴的振动曲线被认为是具有0.9 mm的幅值的 sin函数;从图2(b)的b3可以看出,沿着y轴方的振动曲线被认为是具有0.8 mm的幅值的 sin函数;
该方法利用巡检机器人在上升过程中的加速度来判断巡检中的 z轴位置。在攀爬时,步行段受力的方向发生了变化,从而引起了与 y轴相同的加速度的变化。因而,沿线性高压线的传送部分的运动方向是 y轴。在以1 m/s的速率向上攀爬时,步行段的振动位移量很小,移动平稳。
2.3 下坡时震动实验
巡检机器人在高压线路的下坡振动分析与前面相同,数据滤波后进行振动分析。当巡检机器人从30°高压线路上以1 m/s的速度下降时,震动图如图3所示。
从图3(a)的a3可以看出,沿着x轴的振荡曲线被看作具有0.8 mm的幅值的 Synthetic函数,并且沿着 y轴的振荡曲线被看作具有1 mm的幅值的 Synthetic函数;在运行过程中,巡检机器人沿着高压电线下行时,其移动部分的振动位移值比上行部分的振动位移值要小。这是由于在选用电动机时,由上向下的电动机比由下向上的电动机更能给出更大的驱动力,从而使由上向上引起的振动位移比由下向上引起的振动更大。在y方向上,最大值为1 mm,说明在1 m/s的速度下行时,其位移很小,很稳定。
2.4 过弯时震动实验
过弯震动实验也是先对实验中获得的数据进行滤波,然后进行振动分析。当巡检机器人以1 m/s的速度过高压线路转弯时,震动图如图4所示。
从图4(a)的a3可以看出,沿着x轴的振荡被认为是一个具有0.5 mm幅度的正弦波。从图4(b)的b3可以看出,沿着 y轴线的振动被看作具有
0.5 mm的幅度的一个正弦曲线。在转向过程中,步行部分的振幅大于直线部分,而在转向过程中,步行部分的振幅大于上、下2个方向。这是由于地心引力的影响只发生在上、下的角度,只有在左、右转动时才会发生变化。增加摩擦,即巡检机器人在高压线路转弯时产生的激励小于上、下斜坡行驶,大于直线行驶。 x轴方向和y轴方向上的最大振动位移为0.5 mm,这表明当行走部以1 m/s的速度转转时,振动位移小且运行稳定。
3 仿真实验结果分析
为了研究仿真巡检机器人的运动性能和障碍克服能力,在给定约束和外力条件下,通过建立该巡检机器人系统的运动学和动力学模型,进行了虚拟模型仿真分析。巡检机器人在高压线路实际工作时会涉及碰撞、变形和摩擦。因此采用机械系统自动动态分析(ADAMS)模拟了机器人在高压线路上的爬升状态和障碍克服过程,记录并分析了机器人的速度、位移。设定高压线路障碍物高度为20 mm。
3.1 巡检机器人越障速度与位移变化
在高压线路检修时,经常会遇到各种障碍,因此研究机器人在跨越障碍时的速度与位移,可进一步研究巡检机器人在工作时的稳定性。巡检机器人在克服障碍过程中的速度和位移曲线如图5所示。
从图5可以看出,在1.8~4.6 s时,巡检机器人前轮克服障碍;在6.3~8.9 s时,巡检机器人后轮克服了障碍。当巡检机器人前轮在1.8 s遇到障碍物时,其小V形轮卡住,机器人速度从72.5 mm/s迅速下降;然后前轮旋转以克服障碍物,机器人速度约为50 mm/s。最后,机器人速度在完全克服障碍物后恢复到初始值。在6.3 s时,后轮开始克服障碍,机器人速度比以前更稳定。在整个障碍克服过程中,机器人的前向位移略有波动。
3.2 巡检机器人扭矩变化
图6为在进行高压电线的巡视过程中,巡检机器人前后车轮扭矩的改变情况。
从图6可以看出,在巡检机器人从高压电线上离开时,前部和后部的驱动扭矩都是最大的,而后轮的最大的驱动转矩是2.53 N·m,前轮的最大的驱动转矩是3.2 N·m;从曲线上可以看出,前、后2个车轮的传动扭矩均随时间的增加而增加的,并且从曲线上可以看出,后2个车轮的传动扭矩增长率都要高于前2个车轮的传动扭矩;在260 s的模拟时,前、后2个车轮的驱动转矩都有最大值,即分别为4.36、4.05 N·m。同时,前、后2个车轮的驱动力都很低,这也证明了该巡检机器人在高压线路巡检时具有较好的稳定性。从以上的模拟结果可以看出,该系统在无障碍物的条件下,能够平稳地运行,不会出现跳跃和大幅度的振荡现象。
3.3 巡检机器人越障质心变化
在针对高压线路上防震锤的越障模拟中,巡检机器人整体质心的变化情况如图7所示。
从图7可以看出,巡检机器人的质心在x轴上是不会变化的,这意味着巡检机器人在电缆的轴向上是均匀的,所以不会出现在高压电线的轴线上向左和向右摆动的情况。而在 y轴方向上,巡检机器人在y轴方向上表现出有规律的改变,在2~10 s、13~21 s期间,机器人的整个质心垂直向下的改变,这是因为在这个时段中,机器人的攀爬臂向下运动离开了高压电线;在z轴方向(机器人的向前方向),随着时间的增长,质心会出现一种稳定的台阶式的增长,而这种增长质心的改变则表明巡检机器人越障能力较好,因此在越障时,其稳定性也会比较好。
4 结语
针对巡检机器人在不同弯度的高压电线上的运动机理进行了分析,采用试验方法,对悬轨智能巡线机器人在各种工作状态下的振动状况进行了分析。试验证明,在对高压输电线路进行巡检时,所设计的机器人具有很低的震动,工作平稳的特点,对电网巡检设备的巡检工作没有产生任何影响。考虑到现有的试验条件及数据量,悬轨智能巡逻机器人的相关研究尚属初级阶段。下一步的工作将集中于对巡逻机器人的不断改进与完善。
【参考文献】
[1] 姜冬,刘鲲鹏.主动配电网双层实时优化博弈研究[J].电测与仪表,2018,55(18):50-56.
[2] 韩宝虎,赵亮,韩希君.基于深度八叉树的粘接机器人移动轨线自动识别系统设计[J].粘接,2022,49(3):172-176.
[3] 于文妍,杨坤林.四旋翼无人机串级模糊自适应 PID 控制系统设计[J].机械设计与制造,2019,12(1):227-231.
[4] 王维鹏,高春艳,张小俊,等.轻量化爬壁机器人永磁吸附特性分析与仿真[J].制造业自动化,2020,42(12):23-27.
[5] 张树生,马静雅,岑 强,等.煤矿综采工作面巡检机器人系统研究[J].煤炭科学技术,2019,47(10):136-140.
[6] 韩宝虎,赵亮,韩希君.应用巡检机器人的分布式基站布局及网络互联[J].粘接,2022,49(8):155-159.
[7] 韩宇泽,周 平,赵 轩,等.隧道电缆巡检轨道机器人智能越障控制方法研究[J].电子设计工程,2019,27(24):79-83.
[8] 韩宝虎,赵亮,韩希君.应用巡检机器人的分布式基站布局及网络互联[J].粘接,2022,49(8):155-159.
[9] 腾 云,陳 双,邓洁清,等.智能巡检机器人系统在苏通 GIL 综合管廊工程中的应用[J].高电压技术,2019,45(2):393-401.
[10] 赵永清.矿区6kV~110kV架空输电线绝缘包覆作业机器人运动控制研究[J].粘接,2021,46(5):93-96.
[11] 夏云峰,宋新明,贾志东,等.基于巡线机器人的输电线路状态检修技术研究现状与展望[J].高压电器,2018,54(7):53-63.
[12] 杨元义,杨超.基于SLAM的机器人运动控制系统设计[J].粘接,2021,48(12):107-111.
[13] 王志中.基于改进蚁群算法的移动机器人路径规划研究[J].机械设计与制造,2018,12(1):242-244.
[14] 陈 勇,李 鹏,张忠军,等.基于PCA-GA-LSSVM 的输电线路覆冰负荷在线预测模型[J].电力系统保护与控制,2019,47(10): 110-119.
[15] 马小敏,高 剑,吴 驰,等.基于灰色支持向量机的输电线路覆冰厚度预测模型[J].中国电力,2016,49(11): 46-50.
[16] 樊琛,王毅.基于浮游式变压器巡检机器人系统设计与试验[J].粘接,2022,49(12):174-177.
[17] 李乾,钱恒健,方永毅,等.电缆隧道智能巡检机器人在电网智能化中的应用研究[J].粘接,2021,45(1):85-89.
[18] 冯世杰,张铁刚,马超,等.基于Elman神经网络的电力巡检机器人视觉误差校正方法[J].自动化与仪器仪表,2023(2):253-257.
[19] 杨海亮,姚日斌,何南.智能巡检机器人的换流站安全监督研究与实践[J].信息技术,2022(10):70-75.
[20] 于飞,卢朝霞.基于改进蚁群算法的四足巡检机器人全局路径规划方法[J].制造业自动化,2022,44(7):154-157.
猜你喜欢
计算技术与自动化(2017年1期)2017-05-08 14:54:53
山东工业技术(2017年8期)2017-05-08 11:06:42
科技创新导报(2016年28期)2017-03-14 11:37:42
科技与创新(2017年1期)2017-02-16 20:13:13
成长·读写月刊(2016年12期)2017-01-12 18:22:23
科技与创新(2016年18期)2016-11-04 10:30:42
科技视界(2016年24期)2016-10-11 13:38:54
科技经济市场(2016年1期)2016-02-02 21:39:05
科技与创新(2015年24期)2015-12-21 23:44:30
能源研究与信息(2015年3期)2015-11-18 00:43:59