
二水平最优列扩展设计的构造及性质*
2023-07-03 06:44:12张诗娴田杰中柏启明李洪毅
吉首大学学报(自然科学版) 2023年3期
张诗娴,田杰中,柏启明,李洪毅
(吉首大学数学与统计学院,湖南 吉首 416000)
部分因析设计是从完全因析设计中精心挑选的一个子集,相比完全因析设计,其试验次数更少、成本更低.对于那些昂贵且耗时的试验,试验者更倾向于选择最优部分因析设计,这样可以在很大程度上节约成本并获取有价值的信息.关于如何衡量一个设计是最优设计,学者从不同角度给出了一些度量准则[1-5].
当采用初始设计进行试验得到的结果达到目标时就可以结束试验,然而很多时候仅采用初始设计无法达到试验预期的目标,这时就需要跟随试验通过添加试验次数或因子数来进一步收集信息.折叠和半折叠技术是添加设计试验次数的重要方法,常用于跟随试验.但由于这2种方法在跟随试验中添加试验次数时非常不灵活,因此学者构造了一系列更灵活的行扩展设计[6-10].除此之外,学者还考虑对因子数进行添加,即列扩展[11-13].许多工业试验如半导体制造中,在试验的初级阶段容易忽略某些重要的因子,因此需要将这些因子添加到下一阶段的试验中[14],即对初始设计进行列扩展.考虑到现有的许多构造方法需要算法搜索或者一定的技术性手段,因此笔者拟采用一种不需要计算机搜索的方法来更灵活地构造列扩展设计.
1 基本概念和准则
考虑一个具有n次试验、m个因子、二水平的设计X,设计X对应于一个n×m矩阵,矩阵的每个元素取自集合{-1,+1}(简写为{-,+}).称设计X是一个U-型设计,如果设计X中的每个元素在每列中出现相同的次数,这样的二水平U-型设计的集合记作U(n;2m).
对于任意二水平设计X∈U(n;2m),当m=n-1时,称设计X为二水平饱和设计,当m>n-1时,称设计X为二水平超饱和设计.E(s2)准则[1]就是最小化E(s2),
(1)
其中sij是矩阵XTX中(i,j)位置上所对应的元素.使得(1)式最小化的设计就是E(s2)最优的超饱和设计.
对于任意设计X∈U(n;2m),距离分布
dH(xk,xl)+δkl(X)=m.
对于任意设计X∈U(n;2m),广义字长型模式为
(2)
其中
对于任意设计X∈U(n;2m),记t阶矩为Kt(X),
(3)
最小矩混杂(Minimum Moment Aberration,MMA)准则[3]就是序贯最小化Kt(X).
基于中心化L2-偏差,Fang等[15]定义了均匀性模式MIi(X),并用它来度量设计X∈U(n;2m)在i维投影上的总体均匀性:
最小低阶投影均匀性(Minimum Projection Uniformity,MPU)准则[15]就是序贯最小化MIi(X).
2 二水平最优列扩展设计的构造
设初始的二水平设计X∈U(n;2m),将低水平-用(-,+)替换,高水平+用(+,-)替换(表1).完成替换后得到一个列扩展设计,记为L(X).与初始设计X相比,列扩展设计L(X)的试验次数不变,因子数变为原来的2倍,显然L(X)∈U(n;22m).

表1 设计X的水平替换方式Table 1 Level Replacement Method of the Design X
例1考虑初始设计X∈U(4;23),
将设计X的低水平-和高水平+按表1所示的方法进行替换,可得列扩展设计L(X)∈U(4;26),


(4)
(5)
(6)
命题1显然成立,证明过程省略.
3 列扩展设计与初始设计在筛选准则下的解析联系
3.1 E(s2)准则
下面的定理建立了列扩展设计L(X)的E*(s2)和初始设计X的E(s2)之间的解析联系:
定理1令设计X∈U(n;2m),L(X)∈U(n;22m)是X的列扩展设计,则有
(7)
证毕.
由定理1可知,列扩展设计L(X)的E*(s2)是初始设计X的E(s2)的线性变换,且初始设计X的E(s2)的系数是一个非负数,因此最小化E*(s2)当且仅当最小化E(s2).由此可得如下结论:
定理2在E(s2)准则下,列扩展设计L(X)是最优的当且仅当初始设计X是最优的.
由文献[4]可知,对于任意设计X∈U(n;2m),则设计X的E(s2)满足
(8)
根据定理1和(8)式可获得E*(s2)的一个下界,该下界可作为一个基准用于评价列扩展设计L(X)的优良性:
推论1令设计X∈U(n;2m),L(X)∈U(n;22m)是X的列扩展设计,则设计L(X)的E*(s2)满足
3.2 GMA准则

定理3令设计X∈U(n;2m),L(X)∈U(n;22m)是X的列扩展设计,则对于1≤j≤2m,有
证明由(2),(5),(6)式可知,对于1≤j≤2m,有
注意到
于是
证毕.
推论2令设计X∈U(n;2m),L(X)∈U(n;22m)是X的列扩展设计,则有
其中βr是仅依赖于n,m和r的常数,0≤r≤m.
证明由文献[16]中的引理1,有
结合定理3,结论成立.
证明由文献[15]中的定理2,有
结合定理3,结论成立.
3.3 MMA准则

(9)
证明由(3)和(4)式,可得
证毕.
证明由文献[3]中的定理4,可得
结合定理4,结论成立.
Xu[3]给出了设计X的t阶矩Kt(X)与字长型Aj(X)之间的联系:
(10)
其中αj,0≤j≤t和c0是仅依赖于n,m,j,t的常数.Xu[3]指出,因为(10)式中At(X)的系数αt>0,所以序贯最小化Kt(X)等价于序贯最小化At(X),t=1,2,…,m.
推论6列扩展设计L(X)是MMA或GMA的,当且仅当初始设计X是MMA或GMA的.
4 数值算例
例1(续)由(1)式可以得到例1中初始设计X的E(s2)=0,即X在E(s2)准则下是一个最优设计.又由(7)式计算可得列扩展设计L(X)的E*(s2)=3.2.因此列扩展设计L(X)在E(s2)准则下也是一个最优设计.这一数值结果支持了定理2的理论结果.
例23个初始设计X1,X2和X3(表2)都是试验次数为12、因子数为5的二水平部分因析设计.Ma等[17]给出了GMA准则下设计X2比X1表现较好,且设计X1和X2都比X3表现较好的结论.

表2 初始设计X1,X2和X3Table 2 Initial Design X1,X2 and X3
表3是初始设计X1,X2和X3的列扩展设计L(X1),L(X2)和L(X3)分别在GMA准则和MMA准则下的数值结果.
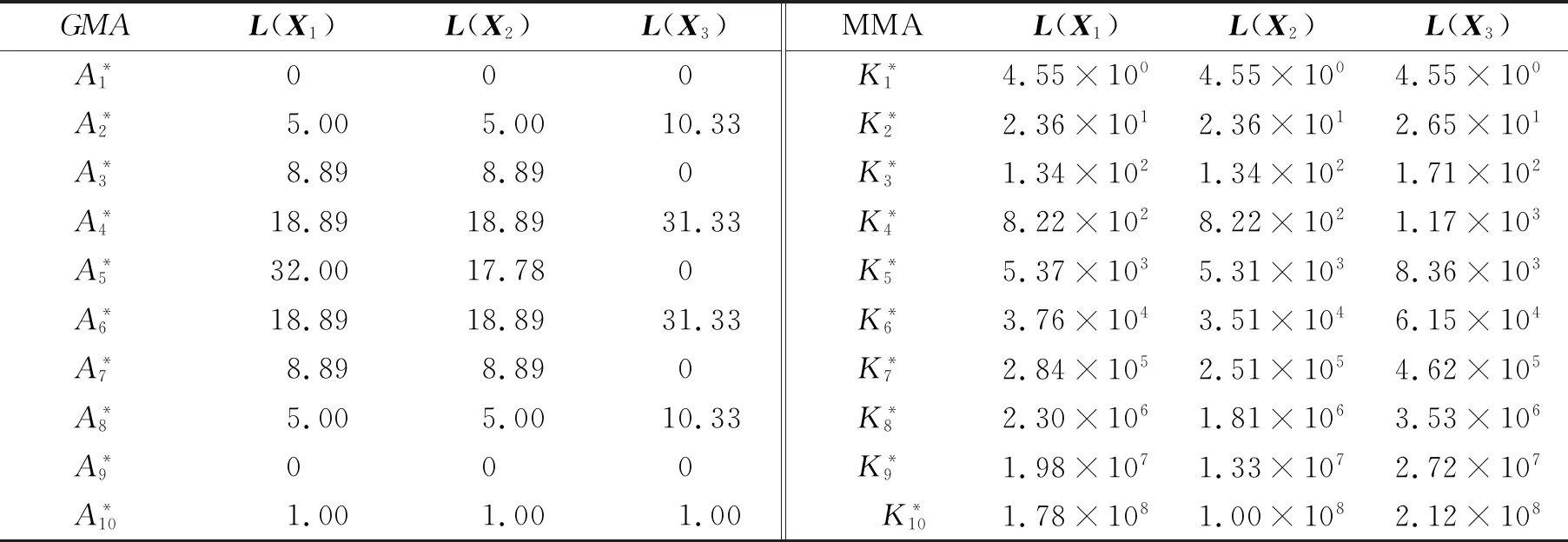
表3 L(X1),L(X2)和L(X3)的数值结果Table 3 Numerical Results of L(X1),L(X2) and L(X3)
由表3可知,基于GMA准则和MMA准则,设计L(X2)比L(X1)表现较好,设计L(X2)和L(X1)都比L(X3)表现较好.这些数值结果支持了推论6.
猜你喜欢
中等数学(2022年6期)2022-08-29 06:15:08
智能建筑电气技术(2022年2期)2022-02-06 02:30:46
商用汽车(2021年4期)2021-10-13 07:16:02
数学物理学报(2020年6期)2021-01-14 01:00:14
数学物理学报(2020年1期)2020-04-21 06:00:54
校园英语·上旬(2019年6期)2019-10-09 04:08:57
中学生数理化·七年级数学人教版(2017年6期)2017-11-09 02:45:57
中学生数理化·中考版(2017年12期)2017-04-18 12:55:03
系统工程与电子技术(2016年7期)2016-08-21 13:59:02
浙江共产党员(2015年11期)2015-05-23 12:05:41
