基于双频扩张状态观测器的无人机抗扰控制
2023-06-10 07:53夏笠城王姝旸张晶杨凌宇
北京航空航天大学学报 2023年5期
夏笠城,王姝旸,张晶,杨凌宇
(北京航空航天大学 自动化科学与电气工程学院,北京 100191)
系统建模中的不确定性和系统运行过程中的干扰是控制理论与工程界需要解决的核心问题之一。在多种不确定性和扰动中,无法直接利用控制输入补偿的非匹配、快变/突变扰动是最为复杂的,但同时在工程应用中最为常见,如高超声速滑翔飞行器的气动特性[1]、磁悬浮控制敏感陀螺的外部突变扰动[2]及系统突发故障引起的参数跳变等。
在无人机控制领域,体重在100 g 以下的微型四旋翼无人机具有体积小、质量轻等特点:①其运动更容易受到周围环境扰动的影响,对质量、载荷和执行机构的不确定变化也更加敏感[3];②由于旋翼的动态带来的时滞特性,导致控制输入无法对外部扰动直接补偿,使扰动呈现典型的非匹配特征。针对非匹配快变/突变扰动,探索工程可用的估计和补偿控制方法,可有效提升微小型无人机的动态性能和控制精度,同时对类似系统的自适应、容错控制技术研究也具有重要的意义。
在快变/突变扰动的估计中,扩张状态观测器(extended state observer, ESO)是 最 为 有 效 的 手 段之一[4],被广泛应用于航空[5]、机器人[6]及其他领域[7]中。理论上,若扩张状态观测器的带宽覆盖了扰动的频段,其可以获得足够的估计精度,且带宽越大,估计的精度越高,快速性越好;但当实际系统存在量测噪声时,增大观测器带宽会显著放大噪声的影响,造成精度下降甚至估计失效[8]。近年来,学者们针对估计扰动和抑制噪声存在矛盾的问题进行了大量的研究。Xue 等提出了自适应扩张状态观测器,利用卡尔曼滤波的思想自适应调整误差的增益,在准确估计扰动和噪声抑制之间寻求折中值[9]。Rsetam 等提出了分离扩张状态观测器,该观测器将一个高阶系统拆分成若干个低阶系统,对于每个子系统都用一个低阶线性扩张状态观测器进行观测从而降低误差的增益[10]。Prasoy 和Khalil 等提出了一种非线性高增益观测器,把观测值与量测值的误差作为判断系统瞬态与稳态的依据,分别配置合适的误差增益[11]。Jo 等提出了一种噪声抑制扰动观测器,在线性系统中扰动观测器的基础上改善了其反馈形式,并通过Q 滤波器抑制噪声的影响[12]。Tamhane[13]和Sun[14]等对滑模观测器进行了改进,将输出量的积分作为新的状态变量,并选择合适的滑模面来有效抑制噪声的影响。Wang 等提出了一种非线性信号校正观测器,并用于无人机系统中的信号观测和校正[15],但为提高扰动的估计速度,观测器的误差增益需要增大,此时噪声可能无法被有效抑制。其他研究也存在类似的问题,在扰动突变较小的情况下,观测器才能抑制噪声对扰动估计效果的影响。此外,上述研究均采用了较为复杂的观测结构和参数,这导致其调参难度大大增加,或者过多依赖于扰动的先验知识,严重影响了上述方法的工程应用。
从上述研究可以看出,有效估计扰动和抑制噪声之间的矛盾虽然能够抑制,却是不可消除的,尤其是在存在快速变化、高幅值扰动的系统中,观测器的误差增益会为快速跟踪扰动而相应增大,量测噪声对观测结果的影响会随之变大,此时的折中解将更难选取。此外,对于非匹配的扰动,反步法可以通过Lyapunov 方法设计控制律,保证系统对非匹配不确定性和扰动的渐进稳定。Wan[16]和Zhang[17]等利用反步法对非匹配不确定性和扰动进行补偿,但是上述反步法补偿的不确定性和扰动都是慢变的且没有考虑系统的量测噪声,需要进一步研究。因此,如果能够对非匹配快变扰动进行准确的估计,就可以使用反步法设计控制律补偿扰动,从而提高系统对不确定性和扰动的鲁棒性。
针对上述问题,本文提出了基于双频扩张状态观 测 器(bi-bandwidth extended state observer, BESO)的反步抗扰控制方法,并以微型四旋翼无人机的定高控制为例进行了对比分析和验证。
1 问题描述
不失一般性,带有非匹配扰动和量测噪声的单输入单输出l阶线性系统可表示为
式中:xi(i=1,2,···,l)为 状态变量;u为 输入;b为输入增益;f(x1,x2,···,xl)为已知状态转移方程。设系统的各个状态量xi均存在不同程度的时变扰动di,且满足:
由于控制输入u只 作用于xl,无法直接完成对所有扰动的补偿,因此属于典型的非匹配不确定性问题。
实际系统中,状态xi的 测量值x˜i往往受到噪声污染,表示为式(2)的形式,其中,ni为方差 σi的高斯白噪声,ni∼N(0,σ2i)。
理论上,在不考虑量测噪声情况下,现有干扰估计器的性能可以通过增大观测增益任意提升,从而实现对快变甚至突变扰动的快速估计;但当量测噪声存在时,高增益对噪声的放大将直接影响扰动的估计精度,甚至导致观测器失效。如何实现对快变/突变扰动的快速估计,同时有效抑制噪声的影响是干扰估计方法能否工程应用的重要问题之一。
因此,本文的目标是在系统存在量测噪声的情况下,完成对非匹配快变扰动的准确估计并设计抗扰控制律,完成对期望指令的快速准确跟踪,提高系统对不确定性和扰动的鲁棒性。
2 双频扩张状态观测器
对于系统不确定性和未知扰动的估计,线性扩张状态观测器(linear extended state observer, LESO)可以通过增大观测器的带宽提高扰动估计的精度,但是误差的高增益会放大量测噪声,估计扰动和抑制噪声之间存在矛盾。当系统同时存在快速时变扰动和量测噪声时,LESO 无法设计合理的带宽以克服这个矛盾。本节基于文献[18],针对式(1)和式(2)所描述的系统结构设计了BESO 的结构,使得观测器不需要知道扰动的先验信息,能在准确估计快变扰动的情况下抑制量测噪声的影响。
对于式(1)和式(2)表示的系统,构造如式(4)所示的BESO,该观测器由l组BESO 共同构成,其中,前l−1组具有相同的结构。
式中:ei为 对测量值x˜i的观测误差;βi1和 βi2为对应的观测器的增益,可按LESO 的带宽配置方法,将观测器极点配置到 (−ωi,−ωi)处 。由此得到 βi1和 βi2的值如下:
式中: ωi>0表示BESO 的中心带宽。与LESO 不同的是,BESO 的工作带宽还与方向转换因子 γi和双带宽比例因子 ηi相关,这3 个参数对BESO 性能的影响特点如下:
1)中心带宽 ωi决定了观测器的总体性能,ωi越大,BESO 对di的估计越准确,收敛速度越快。对于频率较大的di,其变化较快,应选取较大的 ωi,反之,则选取较小的 ωi就可以达到较准确的估计。因此,适当地选取中心带宽可以对不同频率的扰动进行有效的估计。
2)当 ηi=1时 ,BESO 等价于LESO,当 ηi≠1时,BESO 具备双带宽的特点,即观测器工作带宽会随着观测误差的收敛方向动态调整。特别是取0<ηi<1时,若观测误差趋向于0,观测器的工作带宽变小,从而在稳态抑制量测噪声的影响;反之,若观测误差增大,则观测器的工作带宽也会变大,从而提高观测器的快速性,使BESO 可以在di发生突变时进行有效的估计。
3)当中心带宽 ωi固定时,ηi选取的越小,可切换的2 个工作带宽相较于 ωi差距越大,BESO 对噪声抑制的效果越好,同时对系统瞬态的观测结果也越准确。
4)BESO 的可调参数只有2 个:ωi和 ηi,参数的调节过程相对简单。
由式(4)可以看出,γi是随观测误差绝对值的导数符号改变的,因此可以采用切换系统理论对BESO 的稳定性进行分析。令真实观测误差为exi=xˆi−xi,edi=dˆi−di,注 意 有exi=ei−ni,结 合式(1)可以得到真实误差的状态方程如下:
式中:
由于l组观测误差方程中的误差项具有相同的形式,且相互独立,为推导方便,省略下标i,将式(6)改写为
注意h中 包了 ∆f项,结合式(7)可做如下分析:当f(·)为xi的线性函数时,∆fl=f(n1,n2,···,nl),其只是噪声的函数,与 [ex,ed]无关,此时式(8)表示的系统稳定性完全由A阵 确定;特别的,若f(·)为xi的非线性函数时,理论上 ∆fl与xi相关,但由于 ∆fl主要是量测噪声导致的误差,考虑到噪声均值是0 且幅值微小,因此 ∆fl由噪声项主导且相对较小,在工程应用中可以忽略其对系统稳定性的影响,则式(8)的稳定性可近似由A阵确定。
进一步考虑到A阵参数的切换变化,为分析系统的稳定性,需要找到一个正定实对称矩阵P满足:
当P存在时,该切换系统存在公共二次Lyapunov函数,即系统稳定[19]。下面给出定理1 得到BESO稳定的参数范围。
定理1 式(4)表示的BESO 公共Lyapunov 存在即观测器稳定的充分条件如下:

基于以上结论,BESO 的参数调节方法如下:
步骤 1 ωi从较小的值逐渐增大,由于噪声的存在,观测器的观测误差会先减小后增大。因此,可以在增大 ωi的过程中通过观察观测器的观测误差变化寻找到一个合适的 ωi值。
步骤 2 ηi应尽可能选取接近定理1 中的下界值,从而达到更好的噪声抑制效果。如果 ηi选取到下界时仍无法达到理想的观测结果,可以适当地继续减小 ηi。这是因为定理1 中给出的 ηi的范围只是一个充分条件,适当减小 ηi可以得到更好的观测结果,此时BESO 可能是不稳定的。因此,具体放宽ηi取值的程度还必须结合进一步的仿真和测试验证。
3 基于BESO 的反步抗扰控制律设计
反步法是通过对闭环系统的Lyapunov 函数进行递归设计,从而使闭环系统的响应有界且能够收敛到平衡点的一种递归设计方法[20],但其控制效果依赖于建模模型精度,本节将BESO 与反步控制相结合,利用BESO 估计系统扰动,利用反步法实现非匹配不确定性的补偿。
对于式(1)和式(2)表示的系统,首先给定指令跟踪目标为x1d,并定义跟踪误差为z1=x˜1−x1d,x˜2为虚拟输入,可构造Lyapunov 函数:
可知,当z2=x˜2−x2d趋 向于0,即x˜2→x2d时 ,V˙1(z1)负定条件满足。
进一步以x2d为 期望动态,x˜3为虚拟输入,设计反步控制律,可构造Lyapunov 函数:
对其求导得
同理可得,x3d=x˙2d−d2−z1−k2z2。
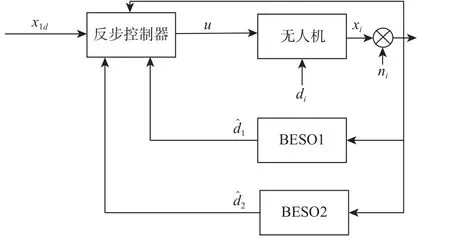
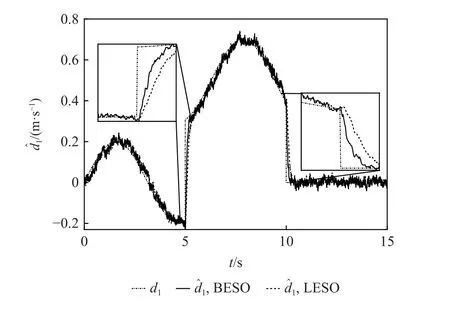
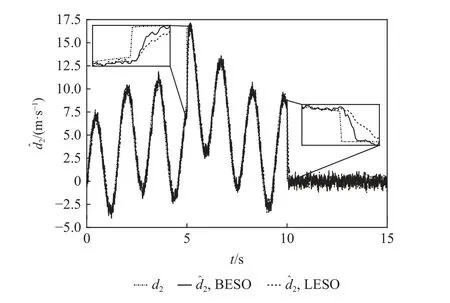
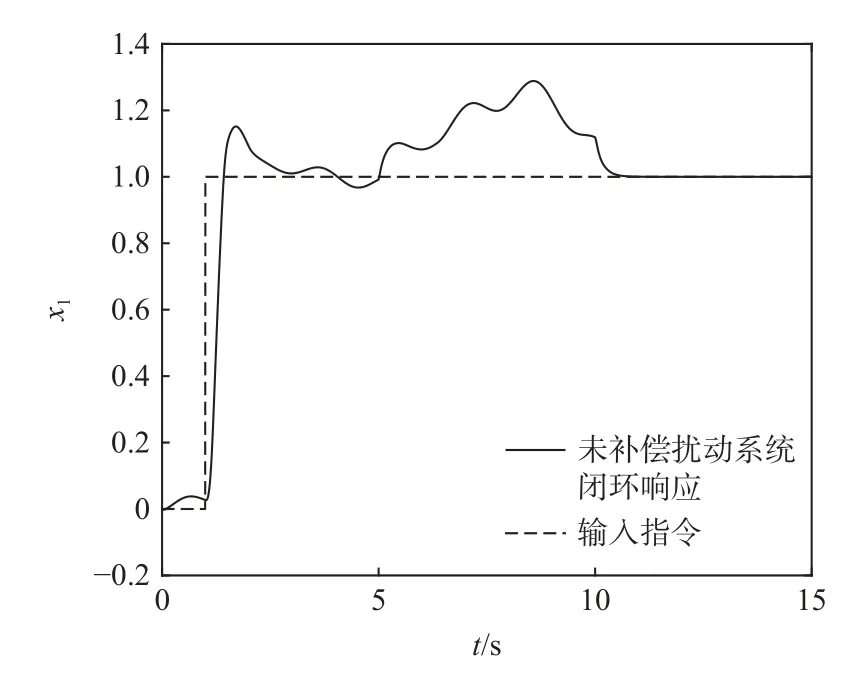
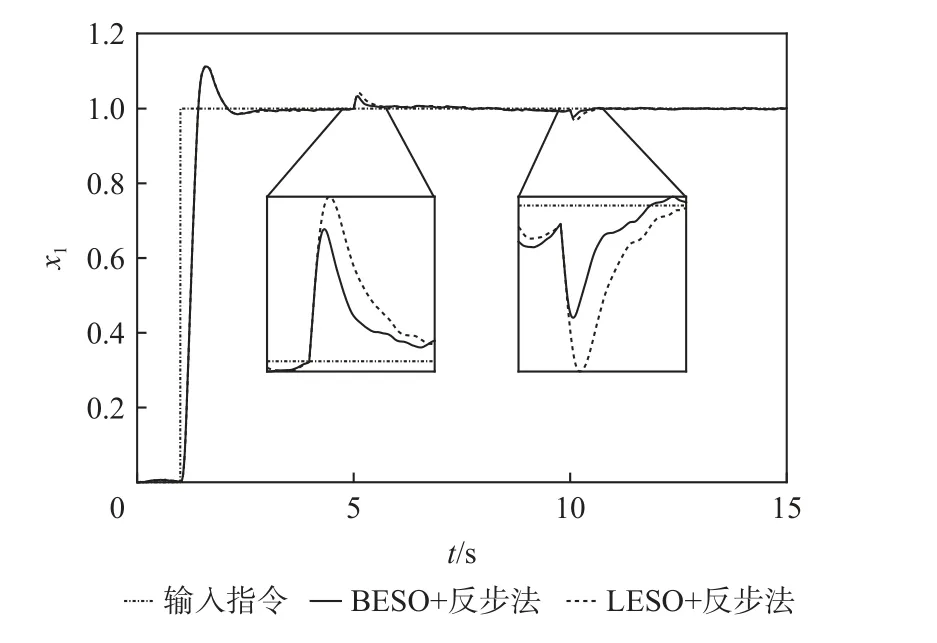
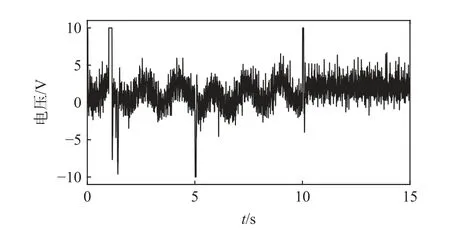
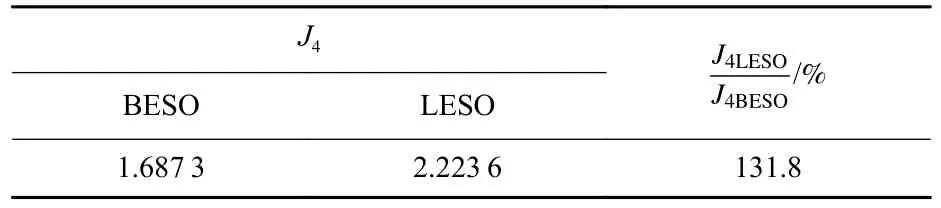
重复上述过程,设xj(d1 其导数为 为使V˙j(z1,z2,···,zj)负定,期望动态需满足: 式中:kj>0,j=1,2,···,l−1。 为综合形成控制律u,可构造Lyapunov 函数: 求导得 当u满足式(24)时,V˙l(z1,z2,···,zl)负定,系统各级跟踪误差zi将渐进收敛至0。 由于BESO 的观测误差exi、edi是有界且按指数收敛的,式(13)~式(24)中的di均可替换为dˆi[21]。为得到式(24),反步控制律设计了l个可调参数ki。基于BESO 的反步控制律参数调节方法如下: 1)根据不同状态扰动的特点,按照第2 节方法确定各自BESO 的参数 ωi、ηi,获得dˆi。 2)反步法中的参数首选根据快速性要求确定k1,然后可按照kj>4kj−1,1 考虑到实际系统输入幅值限制,k1增大虽然会提高系统响应的快速性,但被控对象的实际输入也会随之增大,输入一旦超过边界值被限幅系统会产生较大的超调量,因此x2d可做如下修改: 式中:0 <α<1,修改后的V˙i依然是负定的。这样在|z1|≤ε 时,z1的 增益较大,保证系统的快速性,|z1|>ε 时 ,z1的增益较小,避免输入限幅导致系统超调量过大的问题。 为验证本文方法的有效性,选取微型四旋翼无人机的悬停模态过程进行验证,在悬停过程中,其核心控制变量为飞机的悬停高度。 首先电机环节的传递函数如下: 式中:N为电机转速;u为输入电压;输入范围为[0,10] V。 无人机的升力主要由4 个旋翼产生的拉力提供,在平衡状态下,单个旋翼的拉力与电机转速的关系如下: 式中:F为单个旋翼的拉力。 为使无人机保持水平悬停状态,4 个旋翼产生的拉力相等,且俯仰角和滚转角近似为0,因此无人机的动力学方程如下: 式 中:z为 高 度;m=58 g 为 无 人 机 的 质 量;g=9.8 m/s2为重力加速度。 由于该微型无人机体积小、质量轻,其飞行过程极易受到外界扰动的影响,如周边扰动气流、载荷的移动、飞机姿态的动态运动、甚至桨叶或机身的变形等,这些问题给无人机高精度控制带来了一定的难度。由于作用机理的不同,可能会影响到高度运动的速度或者加速度。将各种不确定性与扰动综合在一起,作为总扰动体现在速度和加速度2 个方程中,分别用d1和d2表 述,进一步设x1=z,x2=z˙,x3=z¨,式(27)~式(29)可改写成: 由于输入电压是通过控制电机转速来改变升力的大小,进而控制无人机的高度,因此u只作用于x3,无法对d1、d2进 行直接补偿,因此d1、d2属于非匹配不确定性和扰动。为综合验证控制器的抗扰性能,仿真中d1、d2选择为快变、慢变、突变的混合形式,使得扰动的形式更具一般性,如下: x1、x2、x3的测量受到量测噪声的影响,如下: 式中:n1∼N(0,0.01),n2∼N(0,0.1),n3∼N(0,0.5)。 针对式(30)表示的系统设计基于BESO 的反步控制律,系统结构框图如图1 所示。为体现该控制律的效果,用LESO 替换BESO 做对比,系统结构框图如图2 所示。 图1 基于BESO 的反步控制律Fig.1 Backstepping control based on BESO 图2 基于LESO 的反步控制律Fig.2 Backstepping control based on LESO 对比BESO 与LESO 扰动估计的结果。仿真时间取15 s。对于d1的 估计,BESO 取 ω1=18,η1=0.42,LESO 取 ω1=16,观测结果如图3 所示。 图3 d1估计结果Fig.3 Estimation results of d1 对于d2的估计,由于其变化更迅速,幅值更大,ω2应选取更大的值。BESO 取ω2=35,η2=0.42,LESO取 ω2=36,估计结果如图4 所示。 图4 d2估计结果Fig.4 Estimation results of d2 由图3 和图4 可以看出,在相近的噪声抑制情况下,BESO 的快速性明显优于LESO。为定量对比2 种方法的估计结果,给出性能指标如下: 式中:J1为 总体估计性能指标;J2为瞬态估计性能指标;J3为稳态估计性能指标。 性能指标越小,代表估计结果越好。分别计算BESO 与LESO 的性能指标如表1 所示。 表1 BESO 与LESO 估计d 1,d2性能指标Table 1 Performance indexes of BESO and LESO on d1 从图3 和图4 中可以看出,在5 s 和10 s 扰动发生快速变化时,BESO 都能比LESO 更快速地估计扰动。从表1 可以看出,BESO 的各项性能指标都比LESO 的性能指标小,说明BESO 不但能在瞬态准确估计扰动,同时在稳态不会放大量测噪声,有效抑制了噪声对估计结果的影响。 接下来调节反步控制律的参数,由于存在输入限幅,x2d按 式(25)和式(26)设计,取k2=40,k3=160,µ=0.1,α=0.2,输入为单位阶跃响应。对于反步法中的x˙id,采用式(39)方式构造滤波器生成: 式中:i=1,2,3,ξ=0.707,φ1=5,φ2=20,φ3=80。 未补偿扰动的反步法闭环响应如图5 所示。 图5 未补偿扰动的反步法闭环响应Fig.5 Closed-loop response of backstepping controller without disturbance compensation 从图5 可以看出,闭环响应无法有效跟踪目标指令,说明只使用反步法无法有效抑制扰动给系统带来的影响。基于BESO 的反步控制律和LESO的反步控制律的闭环响应结果如图6 所示。 图6 补偿扰动的反步法闭环响应Fig.6 Closed-loop responses of two backstepping disturbance compensation 从图6 可以看出,2 种方案的闭环响应超调量均为11%,在 5 s 和10 s 出现快速变化的扰动时,基于BESO 的反步控制律的闭环响应收敛速度快于基于LESO 的闭环响应,而且受到扰动响应变化的幅度较小,x2d的设计也克服了输入限幅带来的问题。因此,基于BESO 的反步控制律在抑制扰动的能力上较于LESO 有了明显的提高。 接下来观察被控对象的实际输入u受噪声的影响。将2 种方案仿真中噪声去掉时的实际输入作为基准输入,基于BESO 的反步控制律的实际输入曲线如图7 所示。 图7 BESO+反步法实际输入Fig.7 Input of backstepping control based on BESO 图7 中,1 s、5 s、10 s 处都出现了输入限幅,这是因为1 s 时系统给定了跟踪目标需要较大的输入电压,5 s 和10 s 时扰动都发生了突变需要较大的输入电压。为定量评价量测噪声对实际输入的影响,引入式(40)所示的性能评价指标: 式中:u0为 无噪声下的基准输入。J4越小代表系统实际输入受量测噪声的影响越小。分别计算BESO 与LESO 的性能指标如表2 所示。 表2 BESO 与LESO 实际输入性能指标Table 2 Performance indexes of BESO and LESO on actual input 从表2 可以看出,基于BESO 的反步控制律的J4较小,且相较于LESO 提升了约30%。因此,基于BESO 的反步控制律的被控对象实际输入受量测噪声的影响较小,该控制器有效抑制了量测噪声对系统的影响。 针对补偿系统中非匹配快速时变扰动和抑制量测噪声的问题,本文提出了基于双频扩张状态观测器的反步抗扰控制律设计方法,应用于微型四旋翼无人机的定高控制,结论如下: 1)与线性扩张状态观测器相比,双频扩张状态观测器可以对快速时变的扰动进行更准确的估计,同时避免放大量测噪声,使得观测器估计扰动的性能得到明显的提高。观测器的可调参数较少,参数的调节过程比较简单,更容易推广到工程应用。 2)基于双频扩张状态观测器的反步抗扰控制律可以对系统中的非匹配扰动进行有效的补偿,使得传统反步法受扰动影响大的问题得到了明显的改善。同时在量测噪声存在的情况下,系统的实际输入受噪声的影响也明显降低。
4 仿真结果与分析


5 结 论
猜你喜欢
石油沥青(2021年1期)2021-04-13制冷技术(2016年4期)2016-08-21测绘科学与工程(2016年4期)2016-04-17少儿美术·书法版(2016年6期)2016-02-06少儿美术·书法版(2016年5期)2016-02-06少儿美术·书法版(2016年3期)2016-02-06铁道科学与工程学报(2015年5期)2015-12-24深空探测学报(2015年3期)2015-12-07电测与仪表(2015年19期)2015-04-09学习月刊(2015年23期)2015-02-26