
自适应机械手爪的专利技术综述
2023-06-07 14:57:12潘玉芬
河南科技 2023年10期

摘 要:【目的】工业产品多样化、差异化、个性化对机械手爪提出新的功能要求,有必要从专利申请的角度对自适应机械手爪的技术进行分析总结。【方法】通过检索统计分析了自适应机械手爪专利申请量的趋势、专利申请的分布及典型的技术方案。【结果】我国自适应机械手爪的申请量居全球首位,但多集中在高校及科研院所,科技成果转化上还有很大空间。自适应机械手爪的研究集中于软体类、伸缩类和连杆类三个方向。【结论】通过对自适应机械手爪的专利申请进行分析,以期为相关人员提供参考和借鉴。
关键词:自适应;机械手爪;工业机器人;专利分析
中图分类号:TP241;G255.53 文獻标志码:A 文章编号:1003-5168(2023)10-0142-04
DOI:10.19968/j.cnki.hnkj.1003-5168.2023.010.030
Abstract: [Purposes] Product diversification, differentiation and personalization put forward new working requirements for manipulator claws, and it is necessary to analyze and summarize the technology of adaptive manipulator claws from the perspective of patent applications. [Methods] The trend of patent applications of adaptive manipulator claws, the distribution of patent applications and typical technical solutions were counted through search. [Findings] The number of applications for adaptive manipulator claws in China ranks first in the world, but it is concentrated in universities and research institutes, and there is still a lot of room for the transformation of scientific and technological achievements. [Conclusions] The patent application of adaptive manipulator claw is analyzed in order to provide some reference for relevant personnel.
Keywords: adaptive; manipulator claws; industrial robots; patent analysis
0 引言
由于工业机器人的成本昂贵,通常采用更换机械手爪的形式来拓展工业机器人的使用范围。工业产品呈现出多样化、差异化、个性化等特点,对机械手爪的使用功能提出了更高的要求,需要能够夹持鸡蛋、水果等这类较为脆弱或柔软的物体,或不规则物体形状的物体,在此需求下,自适应机械手爪应运而生。
1 自适应机械手爪的含义
自适应机械手爪是指其在抓取前并未知晓要抓取的物体是何种形状与大小,在抓取中也未对抓取的物体进行传感检测,但是却可以自适应地调整结构实现抓取的机械手爪。自适应机械手爪的应用使得工业机器人实现了更为有难度的抓取,因此具有广泛的应用前景,针对自适应机械手爪的研究近年来成为新的热点[1-4]。
2 专利申请数量态势分析
为研究国内外自适应机械手爪领域专利申请的现状,本研究选择Himmpat数据库,检索文献涵盖了公开日或公告日在2023年1月1日之前的全球发明和实用新型专利申请。选用的关键词为自适应、软体、气囊,对应的英文关键词为adaptive,soft,air sac。IPC分类号为:B25J15+。基于检索到的专利文献进行数据提取、筛选及归纳,重点从专利申请量年度分布、专利申请的地域分布、主要专利申请人三个角度对检索结果进行分析。
2.1 专利申请年度分布
1978年以来自适应机械手爪全球专利申请量的年度分布,如图1所示。1978年,MAN AG首先提出了抓取力会自动适应被牢固夹持的物体的自适应抓手系统(DE2636473A1),此为全球第一件自适应机械手爪专利申请。1978—1986年,申请总量仅仅87件,技术整体处于萌芽阶段;1987—2013年,每年申请量均在50件以下缓慢波动变化,技术整体处于缓步发展的阶段;2014年申请量急剧上升,并于2020年申请量达到顶峰的639件,技术整体处于快速发展阶段。
国内有关自适应机械手爪专利申请量的年度分布,如图2所示。国内第一件关于自适应机械手爪的专利申请是1986年4月16日的一件个人申请(CN86102562A),涉及一种自动协调连动的平面或空间柔性机构,能抓取各种不同形状与大小的物体。1978—2014年,年申请量均在50件以下缓慢波动变化,技术整体处于缓步发展的阶段;2015年申请量急剧上升,并于2020年申请量达到顶峰的484件,与全球申请态势基本保持一致。
2.2 专利申请地域分布
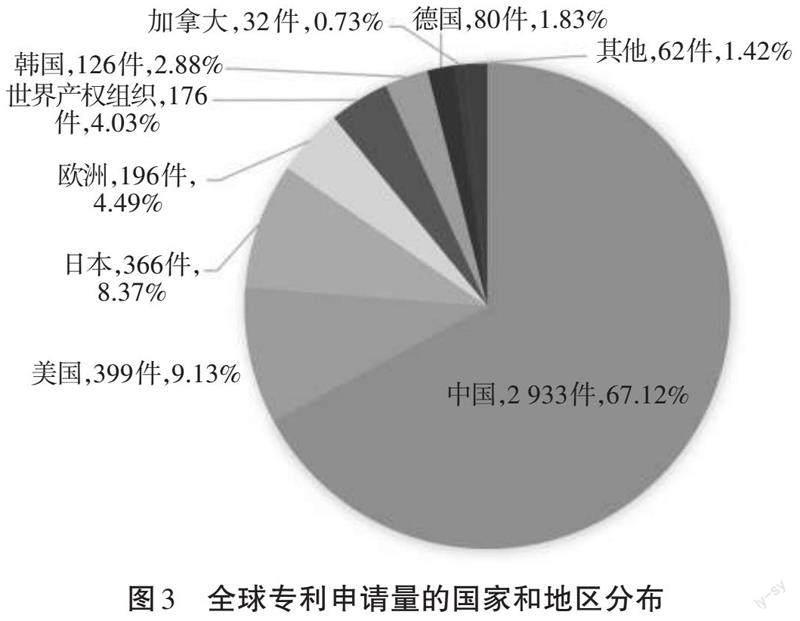
全球专利申请量的国家和地区分布,如图3所示。虽然中国出现较晚,但中国的专利申请在全球专利申请数量上占据绝对优势,居全球第一,约占总份额的67.12%,可见中国对自适应机械手爪方面的相关技术研究非常重视,这与中国近几年在机器人方面的大力投入密切相关。其次是美国,申请量为399件,约占总份额的9.13%。位居第三位的是日本,约占总份额的8.37%。欧洲专利申请约占总份额的4.49%,WO专利申请约占总份额的4.03%。
2.3 主要专利申请人分析
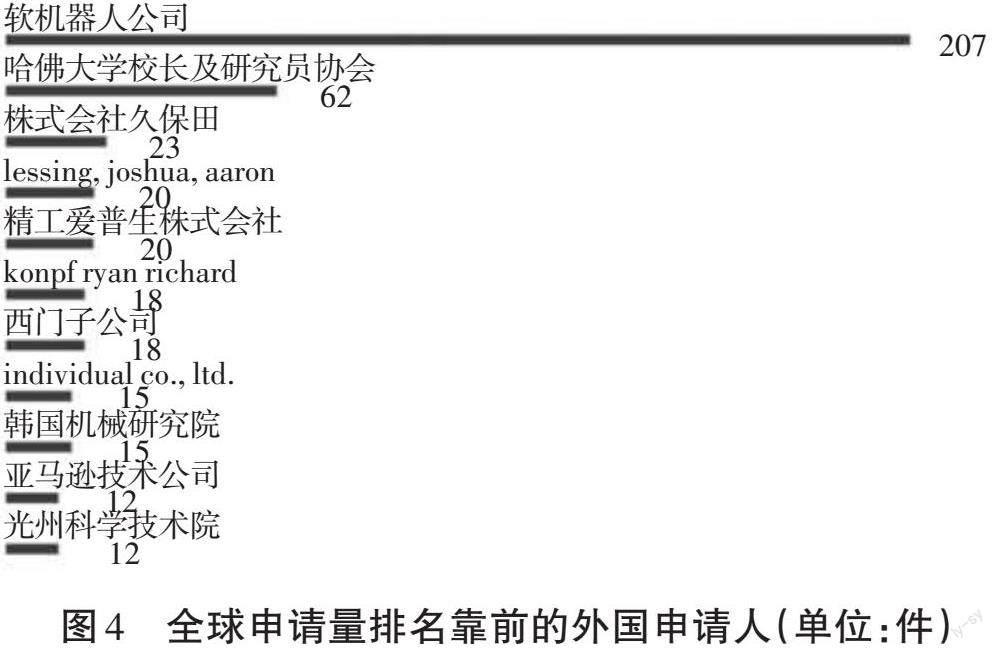
全球申请数量排名靠前的外国申请人,如图4所示。排名第一的为软机器人公司,达到207件,其为一家美国企业;其他申请人中,美国的哈佛大学校长及研究员协会、亚马逊技术公司,日本的株式会社久保田、精工爱普生株式会社,德国的西门子公司,韩国的韩国机械研究院、光州科学技术院的申请数量也名列前茅。
国内申请数量排名靠前的申请人,如图5所示。国内高校中清华大学研究团队的申请量最高,达到全球第一的273件,哈尔滨工业大学、浙江工业大学、燕山大学、江南大学、浙江理工大学、浙江大学、上海交通大学等的数量也是名列前茅。其中,国内企业包括苏州软体机器人科技有限公司和北京软体机器人科技有限公司,企业的研究更加针对软体自适应机械手爪,研究重点明确。国内申请人主要以高校及科研院所居多,表明中国的申请量多,但是在科技成果转化方面还有很大空间。
3 典型专利技术方案分析
通过对检索到的专利申请文件进行分析后发现,自适应机械手爪的研究集中在三个方向:软体类自适应机械手爪、伸缩类自适应机械手爪和连杆类自适应机械手爪。因此,对这三个方向的典型专利技术方案进行分析,以期为创新主体提供高价值专利技术的信息情报。
3.1 软体类自适应机械手爪
软机器人公司提出的专利申请WO2018183852A1,涉及软体软致动器,其在被致动时保持自适应性,以使软致动器可以部分地或完全地适形于待抓持物体的形状。还可以在与物体碰撞时偏转,使得在从一堆或料箱中拾取物体时,避免碰撞相邻物体或者料箱的侧面;因为材料可易于变形,还能够以可控方式在整个大表面区域分布施加大小可控的力。因此,软机器人致动器可自适应抓持物体且不对其造成损坏。
北京软体机器人科技有限公司提出的专利申请CN114952911A,一种软体气动夹爪,涉及软体机器人技术领域。该夹爪包括:囊体、至少两个夹取部件,以及分别与每个夹取部件对应设置的加强筋结构;囊体包括安装结构、弹性驱动薄膜结构、囊腔和囊壁,安装结构在囊体内,用于将软体气动夹爪与外界连接固定,弹性驱动薄膜结构构成所述囊体下端面,囊腔由安装结构、囊壁和弹性驱动薄膜结构包围而成;加强筋结构连接弹性驱动薄膜结构与对应的夹取部件。本申请实施例的软体气动夹爪,由于增加了加强筋结构,因此正压时弹性驱动薄膜结构膨胀幅度减小,能适应更多尺寸的物体;负压时力能更有效地传递到夹爪上,抓取更稳定,进而能抓取更重的物件。
3.2 伸缩类自适应机械手爪
清华大学提出的专利申请CN105619441A,涉及多指紧箍弹性变位杆簇自适应机器人手装置,其主要技术手段是采用基座、驱动器、多孔弹性块、多个手指和多个滑动推杆等综合实现了离散空间自适应抓取功能,利用了多个滑动推杆实现对物体大小和形状的自适应功能;利用传驱动器和传动机构带动手指挤压多孔弹性块或滑动推杆,使多个滑动推杆向装置的中心聚拢,达到对物体的多向抓持效果;该装置对不同方向放置的各种形状物体均可有效抓持,仅需要一套杆簇,结构简单;通过手指紧箍运动,轻松实现多个滑动推杆向装置中心聚拢而达到抓持目的,能耗低。
3.3 连杆类自适应机械手爪
哈尔滨工业大学提出的专利申请CN115781750A,基于双稳态机构的快速响应柔性三指手,涉及机器人末端执行器领域,包括抓取机构,能够实现对多种形状物体的适应性抓取;双稳态机构,用于使柔性三指手稳定维持抓取和张开状态;力度调节机构用于对柔性三指手的触发灵敏度和抓取力度进行调整;复原机构包括推动平台、气缸和导向杆,通过气缸驱动顶杆,实现推动平台的上下移动;复原机构用于使柔性三指手恢复张开状态;驱动机构用于实现触发力、抓取力的调节和柔性三指手的展开复原。本发明响应速度快,能够实现张开、闭合两种状态的快速切换。
苏州艾利特机器人有限公司提出的专利申请CN208557571U,一种自适应机械夹持手爪,末端夹持连杆可以通过绕固联弹簧的销转动,从而实现自适应物体形状的抓取。末端手指可以实现平行抓取和半包围甚至全包围抓取,增加了抓取的可靠性和灵活性。另外,整体结构紧凑,抓取范圍大,所有零件采用高强度金属制造,在电机提供足够功率的条件下,可以实现大夹持力的抓取。
4 结语
我国有关自适应机械手爪的专利申请已经明显高于其他国家,然而,技术大部分掌握在高校和科研院所中,反映出科学技术的转化成果还有很大空间。
自适应机械手爪的研究方向为软体类、伸缩类和连杆类三个方向,软体类的自适应机械手爪目前是各公司的研发重点,其技术相对成熟,申请人在研究时应当进行相应调整。本研究将为后续自适应机械手爪的研究和发展开拓新的技术思路。
参考文献:
[1]邓陶,许兆月.关于新型自适应机械夹具的结构分析[J].河北农机,2014(11):34-35.
[2]李凯,张俊俊,刘满禄,等.两指自适应机械夹持器设计与研究[J].制造业自动化,2016,38(10):39-43.
[3]关凯雁,邢玉华.新型自适应机械夹具堆垛机组结构浅析[J].有色矿冶,2013,29(3):81-82,94
[4]郭钟华,李小宁,林浩鹏.基于主动包络和负压塑形的软体适形夹持器[J].机械工程学报,2019,55(12):215-221.
收稿日期:2023-03-23
作者简介:潘玉芬(1987—),女,本科,助理研究员,研究方向:发明专利审查。
猜你喜欢
合作经济与科技(2017年2期)2017-01-03 22:02:37
科技视界(2016年26期)2016-12-17 15:53:57
科技创新导报(2016年21期)2016-12-17 12:23:00
科教导刊·电子版(2016年26期)2016-11-21 09:41:18
中小企业管理与科技·下旬刊(2016年10期)2016-11-18 20:57:34
汽车科技(2016年5期)2016-11-14 08:03:52
科技视界(2016年18期)2016-11-03 23:15:51
商(2016年29期)2016-10-29 20:58:39
中国科技博览(2016年18期)2016-10-19 07:37:43
中国新通信(2016年16期)2016-10-18 10:54:54
