基于响应面并行子空间设计的载人潜水器优化
2023-06-03 03:40刘峰王萌田震屠超华
哈尔滨工程大学学报 2023年5期
刘峰,王萌,田震,屠超华
(哈尔滨工程大学 船舶工程学院,黑龙江 哈尔滨 150001)
载人潜水器被誉为“海洋学研究领域的重要基石[1],已在诸多领域进行了应用。然而,目前载人潜水器存在成本高[2]、质量大等不足,在一定程度上限制了其应用。随着无人潜水器技术的迅猛发展,如何避免部分应用领域被无人潜水器所挤占,围绕造价和质量等方面的降低开展研究[3],进而提升总体性能必将是载人潜水器技术发展的重要方向。传统的载人潜水器设计基于串行模式开展,存在解耦和矛盾协调困难、计算量大和设计效率低等缺点,导致最佳方案获取困难。多学科设计优化在充分考虑了学科间耦合作用的基础上,对于各学科进行协调和解耦,可提高最佳优化结果获取的可能性,已成为解决复杂工程问题的有效设计方法。
优化策略是多学科设计优化的核心技术,按照层次关系,优化策略可分为以单学科可行方法(IDF) 、一次完全法 (AAO)和多学科可行方法(MDF)为代表的单级优化策略,以并行子空间优化方法(CSSO)、协同优化方法(CO)、两级系统综合方法(BLISS)为代表的两级优化策略;多级优化策略等。在潜水器研究领域,Yukish等[4]将AAO应用于无人潜水器设计;Belegundu等[5]、操安喜等[6]分别将CO应用于无人潜水器、载人潜水器,崔桐[7]利用两型潜水器进行了AAO和CO对比;苗怡然[8]将CO应用于无人潜水器主体优化,王天昊[9]将CO和AAO应用于低成本水下无人试验平台优化;此外,刘蔚[10]提出的BLH和赵敏等[11]提出的BLISCO均为两级优化策略。总的来说,在潜水器领域两级优化策略的应用要多于单级优化策略,这是由于两级优化策略与复杂工程系统设计的组织模式更为符合,从而有利于进行学科间的并行设计和分布式计算。在两级优化策略中,CSSO在计算效率、学科自治和工程实用性等方面具有突出的优势,可缓解多学科优化计算和组织的复杂性难题[12-13]。但CSSO依然存在计算代价大等缺陷,为此,在CSSO基础上形成了并行子空间设计方法(CSD)[14],CSD在子系统层进行分析,优化在系统层进行,其突出了学科自身干预,具有设计灵活、计算花费低等优点,已应用于实际设计中[15]。
本文以一型载人潜水器为研究目标,分析了载人潜水器总体设计模型,进行了学科分解与建模,完成了载人潜水器总体设计优化模型的建立,基于并行子空间设计思想建立了的载人潜水器多学科设计优化求解模型,进行了优化求解,为该载人潜水器设计提供了参考。
1 学科分解与设计参数
依据系统组成、设计流程等,可将载人潜水器总体设计模型概括为图1。载人潜水器总体优化模型分为系统层和学科层。对于图1,认为导航、运动控制、能源、通信、压载、观通、姿态调节、载荷、生命支持、液压作业等的用电量、重量、排水体积等为常量,故将上述系统归为机电学科;出于总布置、水动力等方面考虑,艇型是可变的,艇型变化直接影响结构、推进等,推进、机电和液压作业等直接影响能源,初步建立载人潜水器结构设计矩阵如图2。目标载人潜水器采用回转体艇型,外形及设计参数见图3。

图1 载人潜水器总体设计模型Fig.1 Model of overall design of manned submersible
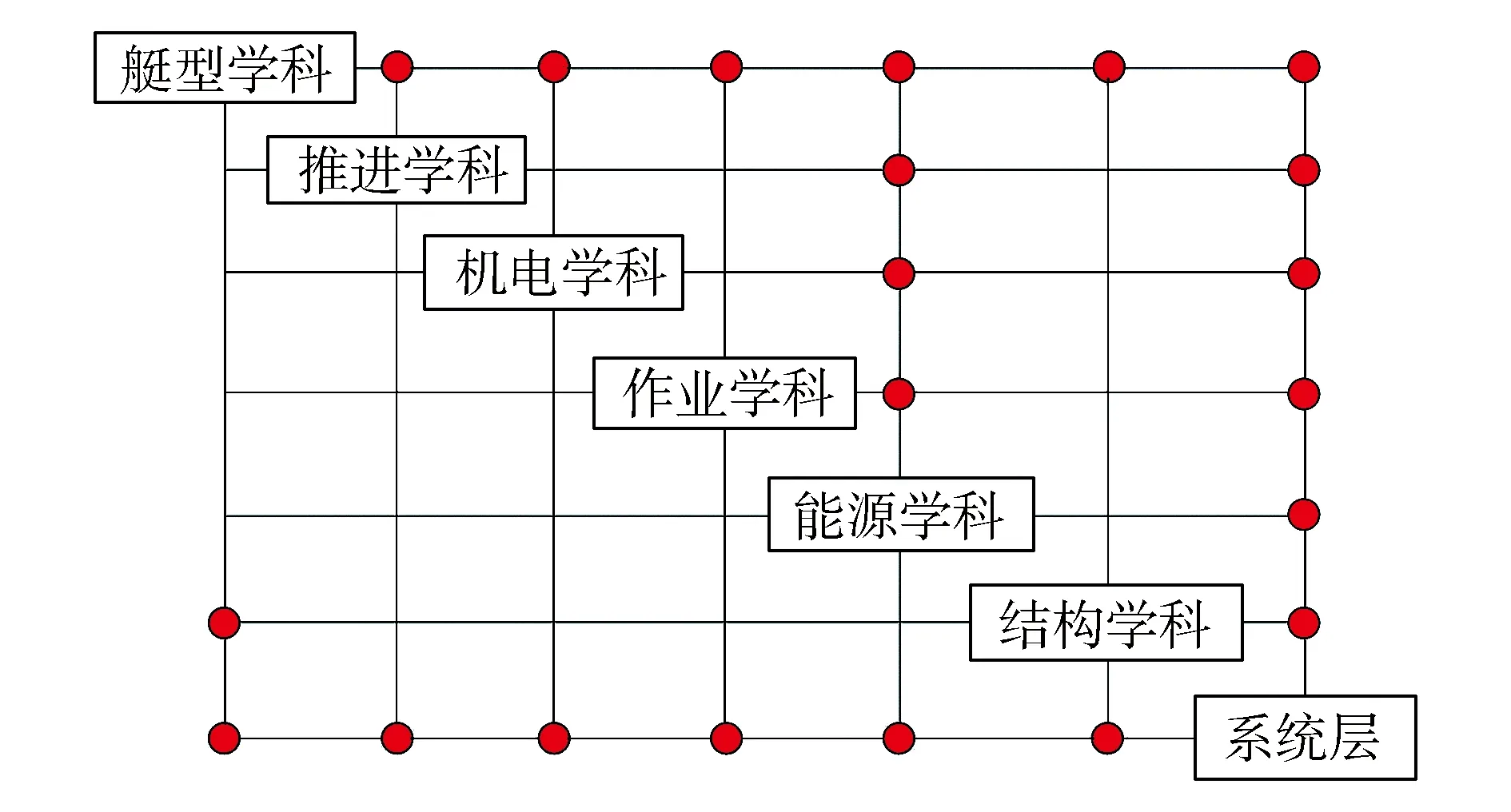
图2 载人潜水器设计结构矩阵Fig.2 Manned submersible design structure matrix
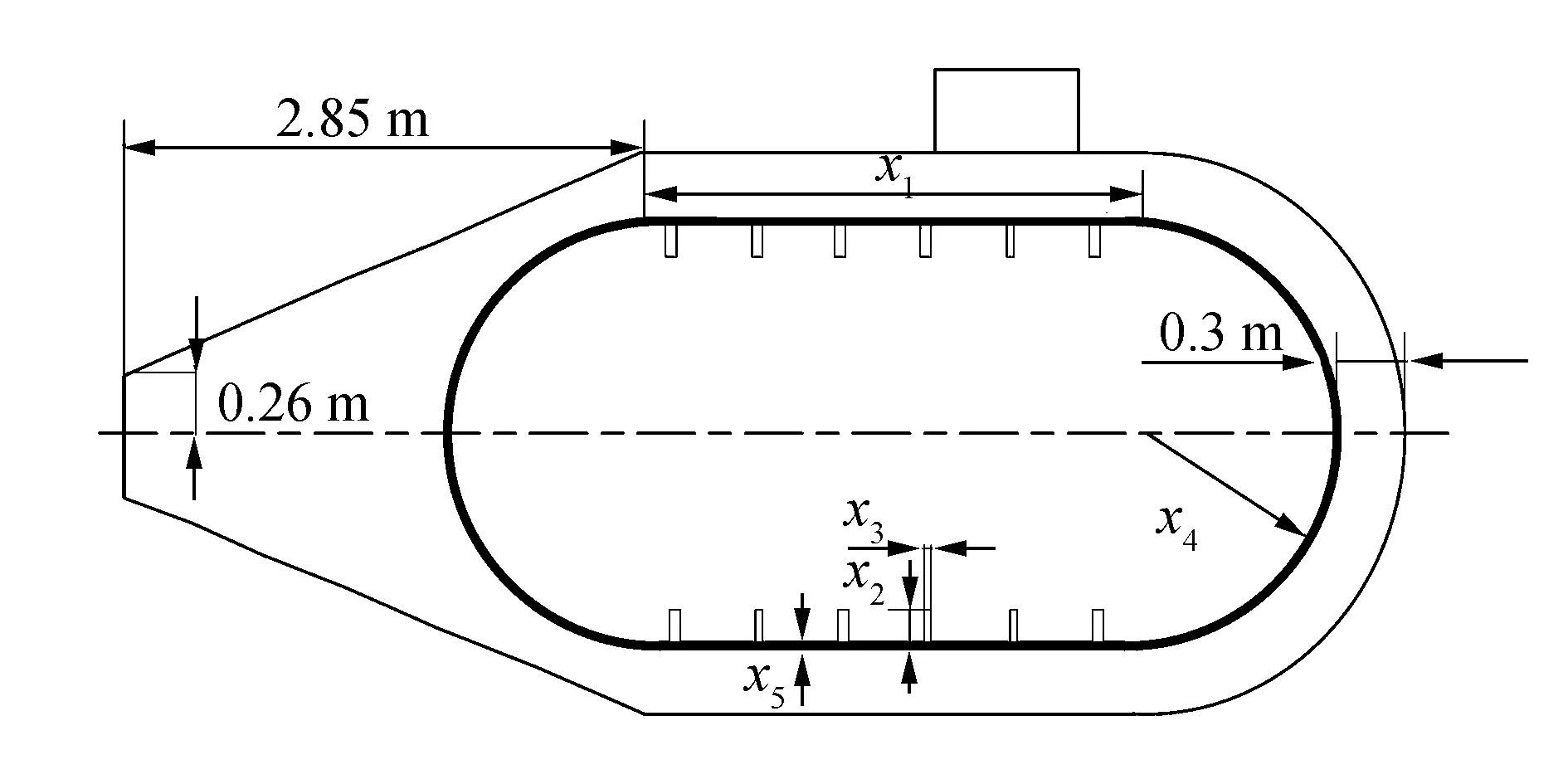
图3 潜水器外形及设计参数Fig.3 Shape and design parameters of submersible
重量对载人潜水器造价、维护和使用等均有重要的影响,是载人潜水器重要的指标,将重量Mz作为目标函数;将Mz、耐压结构极限强度Pcr、最大Mises应力σmax、周向应力σ1、轴向应力σ2作为约束函数;设计变量为平行舯段长x1、环肋高x2、环肋厚x3、柱壳半径x4、壳体厚度x5、半宽x6。将图2、图3进行分析,作业学科和机电学科在设计过程中的质量、排水体积和耗电量等可认为是常量,将这2个学科并入到能源学科;艇型学科向推进学科输入阻力值,由推进学科向能源学科输入耗电量,将艇型学科与推进学科合并为艇型与推进学科,最终载人潜水器的子系统分为艇型与推进学科、结构学科和能源学科,总体设计模型中的数据传递关系见图4。

图4 总体设计模型中的数据传递关系Fig.4 Data exchange relationship of general design model
图4中,Q、M、V分别为耗电量、重量和排水量,下标jg、P、ny分别代表结构学科、艇型与推进学科和能源学科。
2 近似模型及精度判断
2.1 响应面模型
响应面模型(response surface methodology,RSM)是一种对于试验样本点进行拟合的多项式函数。其中,四阶RSM的表达式为[16]:
(1)

2.2 径向基神经网络模型
径向基神经网络模型(radial basis function,RBF) 由输入层、隐含层和输出层组成,hi表示第i个神经元的输出值,选取高斯函数为基函数,其表达式为:
(2)
式中:‖xp-ci‖2为欧式范数;ci为高斯函数中心向量;σi为高斯函数方差。
通过对于每个非线性映射结果所进行线性映射分析,则得到输出层中第j个输出[17]:
1≤i≤n
(3)
式中:wij为隐藏层中i节点中的第j个输出值所占的权重;f(x)表示神经网络的函数值。
2.3 Kriging模型
Kriging模型中响应参数和影响因素之间的关系为[18]:
y(x)=F(β,x)+z(x)=fT(x)β+z(x)
(4)
式中:β为回归系数;f(x)为变量多项式;z(x)为提供局部偏差的近似,即为y(x)的局部变化。z(x)的协方差矩阵为:
cov(x)[Z(xi),Z(xj)]=s2R(xi,xj)
(5)
式中:R(xi,xj)是ns个样本点中任意2个样本点xi和xj的空间相关方程,广泛采用高斯相关方程,具体形式为:
(6)
式中:nd为影响参数数目;θk为相关性系数。
2.4 近似模型拟合精度
采用复相关系数R2进行近似模型拟合精度的判断,R2的值越接近1则近似模型的拟合精度越高,R2表达式为:
(7)
3 总体设计优化模型的建立
3.1 结构学科
利用 Abaqus软件进行耐压结构分析,模型载荷左、右对称,边界条件简化为固定于结构的刚体位移,X、Y轴、中纵剖面处的所有节点在Y轴和Z轴的位移约束为零,非线性屈曲利用弧长法进行分析,弧长为[19]:
(8)

1)内部节点应力矩阵的建立:
(9)
2)按式(14)进行方程的平衡检查
(10)
式中若各项的值很小则收敛,反之,求解:
(11)

(12)
4)继续进行迭代。
(13)

利用最优拉丁超立方方法(optimal Latin hypercube design,Opt LHD)选择50个样本分别采用Kriging模型、RBF和4阶RSM进行拟合,R2见表1。

表1 耐压结构近似模型拟合精度Table 1 Fitting accuracy of approximate model of structural
表1中,4阶RSM拟合精度最高,可作为结构学科替代模型,耐压结构近似模型系数见表2。

表2 耐压结构近似模型系数Table 2 Approximate model coefficient of structural
将表2中的系数代入式(1)可得到σmax、σ1、σ2、Pcr的近似模型,耐压结构排水体积Vps根据公式计算得到,则结构学科的相关状态变量为:
(14)
式中Mother、Vother分别为耐压壳体外附属结构质量和排水体积,两者认为是常量。
3.2 艇型与推进学科
利用RANS法求解直航阻力,RANS法在时均化N-S方程中,雷诺时均化后的不可压连续性方程:
(15)
RANS方程:
(16)

(17)
(18)
式中:Gk和Gw为湍流动能由平均速度梯度引起;Yk和Yw为湍流耗散项与k和w相关。
利用STAR-CCM+进行直航阻力计算,在艏艉部设置内、中、外3层加密区域,将中纵剖面设为对称平面后,仅需设置一半的计算域与模型。设置最大航速3 kn,靠近艉部的平面为压力出口,中纵剖面为对称面,其余4个面均为速度进口。采用Opt LHD选择20个样本点进行直航阻力Fx分析,分别采用Kriging、RBF和4阶RSM进行拟合,R2见表3。

表3 Fx近似模型拟合精度Table 3 Fitting accuracy of approximate model of Fx
表3中,4阶RSM拟合精度最高,可作为Fx替代模型,Fx近似模型系数见表4。

表4 Fx近似模型系数Table 4 Approximate model coefficient of Fx
将表4中的系数代入式(1)可得到Fx:
Fx=Fx(x1,x6)
(19)
选择Model系列推进器,以推力TP为设计变量,输入功率PP、质量MP和排水体积VP为响应,采用二阶RSM拟合得到R2分别为0.968、0.958、0.991,拟合精度满足需要,推进学科近似模型为:
(20)
推力输出中必然存在损失,推进系数P.C为:
P.C=PP/PS=ηh×η0×ηr×ηs
(21)
式中:ηh为艇身效率,取0.75;η0为敞水效率,取0.7;ηr为相对旋转效率取1.0;ηs为轴系传递效率,取0.95。还需要考虑推力减额,一般将总推力与最大艇型阻力的比控制在1.05~1.15,即:
1.05≤ConsT=TP/Fx≤1.15
(22)
ConsT取1.1,则动力电源为推进学科所需的电量QP通过式(21)、(22)计算得到:
FP=2.205 5Fx=2.205 5Fx(x1,x6)
(23)
则推进系统所需电量为:
QP=PPt1
(24)
式中t1为水下巡航时间,为常量。
将式(21)~(24)联立代入式(20)即可得到艇型与推进学科状态变量。
3.3 能源学科
能源系统由控制、动力和应急等3部分组成。动力电源为作业系统和推进供电。对于作业系统,液压泵功率PZY为:
PZY=1.2×p×Qmax/η
(25)
式中:p、Qmax分别为机械手工作压力和工作流量;η为液压泵的效率。
则作业系统所需电量QZY为:
QZY=PZYtZY
(26)
式中tZY为水下作业时间,为常量。
按电池放电90%计算,则动力电源电量QD、体积VD、质量MD为:
(27)
式中:ρn为电池体积密度;ρz为电池重量密度。
除推进、作业系统外,其余设备正常状态下由控制电源供电;紧急状态采用应急电源供电。控制电源电量QK、质量MK和排水体积VK;应急电源电量QY、质量MY和排水体积VY为:

(28)
式中:tK为设备正常工作时间,为常量;tY为应急情况下设备工作时间,为常量。
则能源系统质量Mny、排水体积Vny为:
(29)
3.4 系统层
设各部分质量Mi,重心坐标xgi、ygi、zgi;各部分排水体积Vci,浮心坐标为xci、yci、zci,则:
(30)
则目标载人潜水器总重量和排水量为:
(31)
潜水器平衡时,质量MZ、排水量VZ、水下静稳心高h↓、纵倾角φ0需要满足:
(32)
式中:ϒw、ϒy、ϒf分别为水密度、压载密度、浮力材料密度;Vy表示压载体积;Vf表示浮力材料体积。
将式(31)、(32)联立,得到潜水器的总质量MZ、排水量VZ,则系统层模型为:
Optimization:{minMZ}
(33)
4 载人潜水器优化
4.1 优化算法
多岛遗传算法(multi island genetic algorithm,MIGA)将种群分成多个子群,又称为“岛”,每个岛上的子群独立进化,进化机制不同,一定时间间隔进行“岛屿”间的“迁移”,完成信息交换[14]。图5为MIGA算法流程。

图5 多岛遗传算法流程Fig.5 Multi island genetic algorithm process
4.2 基于CSD的载人潜水器优化框架
对考虑艇型与推进、结构和能源3个学科的载人潜水器进行优化设计,根据并行子空间设计的思想可将式(33)描述为:
(34)
式中:X={x1,x2,…,x6};Y1为艇型与推进学科状态变量;Y2为结构学科状态变量;Y3为能源学科状态变量;d1代表艇型与推进学科分析;d2代表结构学科分析;d3代表能源学科分析。
基于响应面CSD的载人潜水器优化框架见图6。

图6 载人潜水器CSD优化框架Fig.6 Manned submersible optimization framework of CSD
图6的求解步骤为:
1)利用Opt LHD在设计空间进行采样,得到基准设计点X={x1,x2,…,x6},通过系统分析得到相应的状态向量Y={y1,y2,y3}。
2)建立响应面模型。根据{x1,x2,…,x6}和{y1,y2,y3}建立数据库文件,采用RSM对于数据文件进行拟合,完成初始近似模型的构建,作为并行子空间设计的初始模型;
3)并行子空间分析。系统层基于MIGA向各学科输出变量值,各学科利用各自模型进行响应值计算,各学科并行分析模型为:
艇型与推进学科:
(35)
结构学科:
(36)
能源学科:
(37)
式中:appr1为结构学科近似模型;appr2为艇型与推进学科近似模型;appr3为能源学科近似模型。
4)得到各学科响应值后,基于更新程序完成对样本点数据的更新。
5)对更新样本点重新构建近似模型,利用更新后的近似模型进行响应值计算,并传递至系统层。
6)系统层进行优化求解。系统层的学科分析信息来自响应面模型;优化结束后,在最优点处进行系统分析,得到相应的状态变量,并加入到数据库文件,优化迭代过程中样本点数目不断增加,近似模型拟合精度不断提高。系统级优化模型为
(38)
式中:appr1new为结构学科更新后的近似模型;appr2new为艇型与推进学科更新后的近似模型;appr3new为能源学科更新后的近似模型。
4.3 优化求解
以MZ最小为目标函数,MIGA的参数设置为:子群规模20,子群个数20,进化代数为5,交叉、变异、岛间迁移概率分别为0.75、0.01、0.1,迁移间隔代数5,基于图6进行优化求解,见图7。

图7 基于CSD的载人潜水器优化求解Fig.7 Optimization of manned submersible based on CSD
CSSO的求解与CSD类似,只需将3)进行调整,以艇型与推进学科为例,式(35)改为:
(39)
采用相同设置的MIGA进行求解,对于基于CSSO的载人潜水器优化流程进行求解,见图8。
将CSD和CSSO的可行解个数、优化解和计算时间列于表5,并与初始方案进行对比。

表5 优化方案与初始方案对比Table 5 Comparison of optimization scheme and initial scheme
通过图7、图8和表5可以看出,CSD-RS在可行解个数、计算时间和优化解数量等方面均优于CSSO-RS,且求解过程的收敛性和优化程度也均优于CSSO-RS。CSD-RS优化框架中的Fx、Mny和MP等响应初始和最终的拟合精度列于表6。

表6 CSD-RS响应拟合精度变化Table 6 Response fitting acuracy change of CSD-RS
表6中,3个响应的拟合精度均提升至1,可见随着系统优化的进行,CSD-RS求解的精确度不断提高,提高了最优解获取的概率。
4 结论
1)采用几种典型近似模型对于目标载人潜水器直航阻力、结构的样本点进行拟合,结果表明:四阶响应面模型拟合精度最高,适合建立上述2个学科的分析模型,可在保证精度的基础上,提高学科分析效率;
2)CSD-RS和CSSO-RS均实现了载人潜水器的优化,但CSD-RS得到方案更优,且在计算分析效率、最优解获取的概率方面均高于CSSO-RS;
3)CSD-RS可实现样本点和近似模型的更新,随着优化的进行,响应的拟合精度不断提高,提高了优化过程的分析精度、最优解获取的可能性和设计效率。
猜你喜欢
少儿科学周刊·少年版(2022年19期)2022-05-30
中学生数理化·八年级物理人教版(2021年12期)2021-12-31
中学生数理化·高一版(2020年11期)2020-12-14
中国船检(2019年6期)2019-11-29
家庭影院技术(2018年4期)2018-05-09
中国军转民(2017年9期)2017-12-19
幼儿智力世界(2016年11期)2017-02-21
太空探索(2016年12期)2016-07-18
太空探索(2016年9期)2016-07-12
太空探索(2016年6期)2016-07-10