折叠翼无人机集群发射装置设计与仿真
2023-05-30 14:44:14庞欢王道成石东阳刘敬一
机械科学与技术 2023年5期
庞欢,王道成,石东阳,刘敬一
(长安大学 汽车学院,西安 710064)
无人机集群技术在执行任务时不仅具备无人机本身响应速度快、使用成本低和部署灵活等独特优势,还拥有更准确的信息收集能力、更稳定的执行能力和更强的容错性,因此,近些年来,无人机集群技术在军民领域得到了广泛应用和快速发展[1-3]。而无人机集群发射技术是无人机协同作战的先决条件,对无人机协同作战发挥战斗力有着重要影响[4]。
常见的无人机发射技术主要有弹射发射、火箭助推、空中投放、手抛发射和滑轨起飞等[5]。其中弹射发射技术主要有火药作动、气/液压弹射和电磁弹射技术。火药作动式发射技术通过火药燃烧产生的推力发射无人机[6],结构简单、操作轻便,但发射过程产生的高温高压气体,对无人机的冲击、损伤大,同时火工品在保存时也易发生各类失效[7],可靠性、安全性不足,在完成一轮发射任务后,需要填装火药等复杂操作,发射效率低。气/液压弹射技术利用气/液压源释放的能量发射无人机,具有很好的经济性、安全性和隐蔽性等优点,在无人机发射领域得到了广泛研究和应用[8-10],但应用于无人机集群发射领域时,其结构复杂,设计精度要求高、控制难度大。电磁弹射技术作为一种新型发射技术[11],具有更好的安全隐蔽性和机动灵活性,但在复杂战场环境下,极易受电磁干扰,可靠性不足。火箭助推发射技术利用火箭助推发射无人机,具有良好机动性和适应性[12],但用于无人机集群作战时,使用成本高、隐蔽性差。空中投放技术利用各种空中平台,在进行无人机集群发射任务时,作战半径大,打击目标广,但不利于无人机的回收使用[13]。
通过对现有的无人机主要发射技术进行分析,同时结合我国折叠翼无人机集群发射领域存在的需求,在研究某型号折叠翼无人机发射速度、发射频率和无人机质量等主要技术指标的基础上,进行无人机集群发射装置机构设计和仿真分析,设计了一种新型的机械式折叠翼无人机集群发射装置,可实现折叠翼无人机自动、连续、快速、可靠发射。
1 设计思路
为了减轻发射过程中对无人机的冲击、损伤,能够在多样任务、复杂环境下,低成本、高效率、简便、可靠地完成无人机集群发射任务,进一步增强无人机协同作战优势,本方案利用电机的单一动力源通过多对齿轮副减速增矩,协调控制发射机构和输送机构,并利用发射机构中储能弹簧循环弹射无人机,开发设计了一种机械式的无人机集群发射装置,其主要结构包括电机、发射机构、输送机构和传动系统。该无人机集群发射装置设计思路如图1 所示。

图1 无人机集群发射装置设计思路
2 总体方案
为了减轻发射过程对无人机造成的冲击损伤,该集群发射装置利用压缩弹簧储能,循环卸载弹射无人机,并根据无人机质量和发射速度选取压簧型号。通过机构设计,电机的动力经传动系统控制协调,输送机构能够间歇旋转输送无人机,发射机构能够以要求的发射频率发射无人机,其中的输送机构用于填装收缩状态下的无人机,且型号尺寸也具备一定的通用性,其具体的设计方案见图2。

图2 无人机集群发射装置总体方案
在该集群发射装置每个工作周期Tn内,电机的动力经传动系统中的减速器传递给发射机构,发射机构中的套杆组件在电机动力的带动下循环压缩、锁止和卸载压缩弹簧,并利用弹簧卸载释放的能量带动无人机发射。与此同时,电机的一部分动力经减速器和方向组件传递给输送机构,带动其运动,并保证发射机构套杆组件锁止并保持弹簧最大形变量阶段,输送机构为发射机构输送无人机。在发射机构套杆组件压缩、卸载弹簧并发射无人机阶段,输送机构暂停输送无人机,从而实现各自的间歇运动。如此循环,在电机单一动力的带动下,输送机构和发射机构能够分时分段输送和发射无人机,避免了各机构间发生运动干涉,实现折叠翼无人机自动、连续、快速、可靠发射。
3 关键机构设计
3.1 发射机构设计
发射机构的设计要求是能够以一定的发射频率高速弹射无人机,如图3 所示。发射机构主要由弹簧座、套杆组件、弹簧帽、偏心块组件和支架构成。其中的弹簧座在底板处通过螺栓固定在输送机构载盘上,并用于安装压缩弹簧,中间的铁芯对压缩弹簧起导向、支撑作用,铁芯直径、铁芯高度以及底端凸台直径,分别以压簧的最大芯轴直径Dxmax、最小套筒直径DTmin和 自由高度H0进行尺寸设计。

图3 发射机构结构示意图
压缩弹簧在套杆施加的载荷下,进行循环压缩、卸载,其型号的选取依据GB/T 2 089-2009,压簧参数的设计要求为:
式中:H0为 压簧原长,mm;fn为压簧最大形变量,mm;F′为压簧劲度系数,N/mm;mw为无人机质量,kg;mt为套杆组件质量,kg;Vw为无人机发射速度,m/s;Hs为群发装置垂直高度,mm。
弹簧帽用于限制套杆运动范围,并使弹簧卸载完毕后套杆可以快速复位。为了减少套杆在运动过程中对弹簧帽产生剧烈的震动和冲击,在弹簧帽的下端应安装橡胶等材料。
套杆组件的作用是将偏心块输入的力和力矩传递给压簧,实现压簧循环压缩、锁止、卸载功能,并利用套杆挂钩带动无人机发射。为了保证套杆运动过程中的稳定性,套杆外外圆直径以压簧中径D进行尺寸设计。为了减少弹簧卸载过程中造成的能量损失,套杆内壁加工成弓形槽,并在套杆支杆加工通心孔。为了保证套杆支杆在最上端位置开始接触压缩弹簧,套杆支杆外端面在竖直方向上与偏心块组件的转轴重合。
发射机构两端支架的作用是安装、支撑偏心块组件,两端支架通过螺栓固定在输送机构载盘上。为了保证支架具有足够的强度,在支架的侧面上设置有三角板状的加强筋。
偏心块组件的作用是通过与套杆组件几何学和运动学的配合,将电机传递过来的循环动力转变为套杆组件压缩弹簧的分段动力。如图4 所示,偏心块组件的偏心块主体为扇形,其外端面为弧形面,外端面的两端分别为偏心块的接触端和偏心块的分离端。为了防止偏心块接触和分离段与套杆支杆接触过程中发生应力集中,偏心块的接触端和分离段设置成圆角。为了保证偏心块组件与套杆组件的运动学规律与间歇机构的运动学规律相符合,偏心块径向长度Lp与 压簧最大形变量fn的 关系为 2Lp=fn,偏心块的外端面弧线长度为1/4 圆周长,从而实现在每个旋转周期内,1/2 周期内压缩弹簧,1/4 周期内锁止弹簧,1/4 周期,弹簧卸载并带动无人机发射。

图4 偏心块结构示意图
3.2 电机型号选择
电机作为集群发射装置的唯一动力源,为输送机构和发射机构提供转速和转矩。当发射机构中的偏心块接触端处于最高点位置时,压簧产生形变,偏心块组件继续旋转,电机持续输出转矩。当偏心块接触端从最高点位置转过90°时,记此时为偏心块转动初始位置,接下来1/4 周期内偏心块的转动角度为θ,则偏心块组件运动过程所需转矩Mf为
其导函数为
根据导函数关系,可得θ=30°时转矩Mf取得最大值,即当偏心块接触端从最高点向下转过120°时,偏心块组件对套杆组件施加的转矩最大,此时发射机构所需功率Pf为
式中ne为电机额定转速转速,r/min。
在实际工作过程中,传动系统存在一定的功率损失[14](如:减速器和方向组件各齿轮传动副、轴承、油封等处存在摩擦损失;零件表面与润滑油之间的表面摩擦产生的功率损失;电机在带动发射机构工作的同时,需要分配一定的转矩给输送机构),因此,依据电机转速和转矩选取电机标准时,必须使电机的输出功率具有足够的余量,同时由于集群发射装置各机构尺寸限制,电机尺寸不能选择太大。
3.3 输送机构结构设计
输送机构的设计要求是能够存放多架折叠翼无人机,并能够以一定的输送频率和输送速度将无人机输送至发射机构。如图5 所示,输送机构主要由载盘和输送盘构成。

图5 输送机构结构示意图
3.3.1 载盘结构设计
载盘为集群发射装置各机构的安装基体,同时输送机构的输送盘通过大齿圈安装在载盘上。如图6 所示,载盘结构主要由底盘、大齿圈和间歇机构组成。其中,大齿圈装配在底盘的圆周上,与间歇机构的输出齿轮啮合,在间歇机构的带动下,大齿圈在载盘上做定轴旋转。底盘顶面上开有矩形槽和扇形槽,用于防止发射机构套杆组件压缩压簧过程中与载盘发生运动干涉,其位置位于发射机构套杆挂钩的正下方。
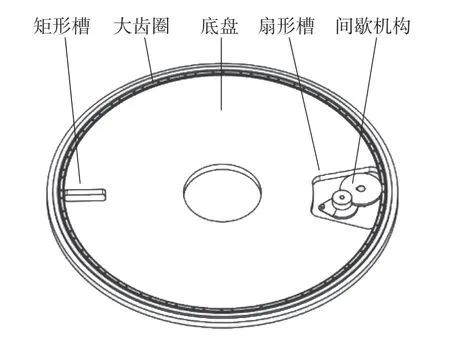
图6 载盘结构示意图
间歇机构的设计要求是能够将电机的连续动力分时分段地传递给输送机构,使输送机构具有间歇性输送无人机的能力[15]。如图7 所示,间歇机构主要由十字轮、旋转轮、旋转台和输出齿轮构成。
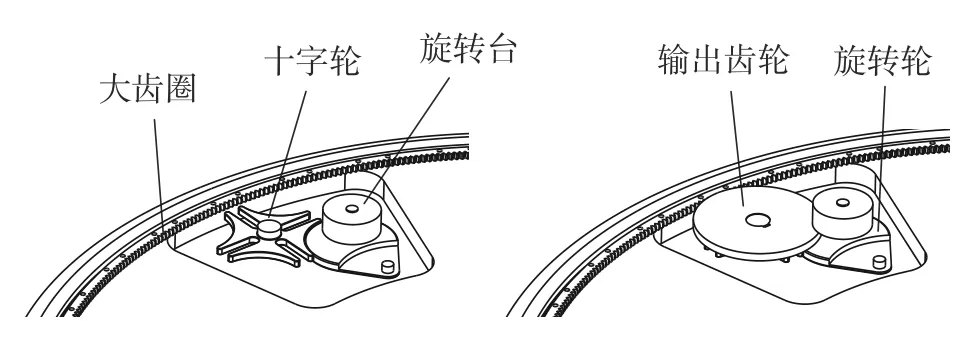
图7 间歇机构结构示意图
其功能原理为,电机的一部分动力经方向组件传递给旋转台,旋转台和旋转轮同轴转动,旋转轮一侧的凸台与十字轮上的十字凹槽相适配。在传动带带动旋转台旋转过程中,旋转轮在每个旋转周期内的3/4 周期内为空转,不与十字轮产生动力传动,而在剩下的1/4 周期时间内,带动十字轮旋转。十字轮上端的输出齿轮与旋转轮同轴转动,并带动大齿圈旋转,从而实现输送机构为发射机构间歇性输送无人机的功能。此时,输出齿轮与大齿圈之间的传动比关系为
式中:i8为 输出齿轮与输送盘之间的传动比;ny为输出齿轮转速,r/min;ns为输送盘转速,r/min。
间歇机构传动比i7为
式中nx为旋转轮转速,r/min。
3.3.2 输送盘结构设计
输送盘的设计要求是能够存放多架折叠翼无人机,并且在无人机型号尺寸上具有一定的通用性。输送盘结构如图8 所示。

图8 输送盘结构示意图
其中的输送盘架通过螺钉固定在大齿圈上,无人机套筒的数量Q(无人机数量)与输出齿轮与大齿圈的传动比i8以 及间歇机构传动比i7的关系为
无人机套筒通过上端耳片的螺栓和下端螺钉固定在输送盘架上,无人机套筒的内侧面开有长凹槽并在底端开有U 型槽,U 型槽与无人机套筒内壁留有间隙,便于安装螺钉固定无人机套筒并保证套杆挂钩与无人机底端有足够的接触面。
3.4 传动系统结构设计
传动系统的设计要求是将电机的输出转矩和转速控制在合理的范围内,使发射机构套杆具有足够的动力压缩压簧,为弹射无人机提供动力,同时,将电机的一部分动力传递给输送机构,根据发射机构发射频率和输送机构间歇运动特性,保证两者之间的同步性和相位协调性[16]。如图9 所示,传动系统主要由减速器和方向组件构成。其中的减速器主要包括三级减速齿轮轴,一个方向齿轮轴和左右两个输出齿轮轴。
其中减速器的第一级减速齿轮轴的输入端通过联轴器与电机的联轴器相连,并通过另一端的齿轮a 将动力传递给第二级减速齿轮轴。第二级减速齿轮轴的齿轮b 与第一级减速齿轮轴输出端的齿轮a 啮合,并通过输出端的齿轮c 将动力传递给第三级减速齿轮轴。第三级减速齿轮轴的齿轮d 与第二级减速齿轮轴输出端的齿轮c 啮合,其输出端的齿轮e 将动力同时传递给方向齿轮f 和右输出齿轮h。方向齿轮f 的另一端与左输出齿轮g 啮合,方向齿轮f 采用和左输出齿轮g 相同的设计参数,它们之间的传动比i4取1,从而使左、右输出齿轮g、h 的转速相同、方向相反。
为了将电机的一部分动力传递给输送机构,并保证输送机构和发射机构之间的同步性和运动协调性,左输出齿轮轴另一端的锥齿轮h 与方向组件上端相同设计参数的锥齿轮i 啮合,再利用下端的皮带将动力传递给间歇机构的旋转轮,从而改变传动方向,保证偏心块组件和间歇机构具有相同的转速。此时,满足的传动比关系为:
式中:i5为 锥齿轮h、i 之间的传动比;i6为皮带传动比。
各级传动轴传动比与电机转速ne、间歇机构旋转轮转速nx以 及传动系统总传动比iz的关系为:
式中:i1为第一级齿轮轴齿轮a 与第二级齿轮轴齿轮b 之间的传动比;i2为第二级齿轮轴齿轮c 与第三级齿轮轴齿轮d 之间的传动比;i3为第三级齿轮轴齿轮g 与方向齿轮轴齿轮f 和右输出齿轮轴齿轮h 之间的传动比;n51为 左输出齿轮g 转速;n52为右输出齿轮h 转速。
根据式(5)~式(9)可知,传动系统总传动比iz与输送盘转速ns和电机的额定转速ne的关系为:
4 建模仿真分析
在对集群发射装置进行详细设计与三维建模后,利用LMS Virtual.Lab 软件进行三维实体模型仿真分析[17],依据无人机集群发射主要性能指标仿真结果验证该设计原理的有效性。
4.1 三维实体模型动力学建模
在进行多体动力学建模之前,针对某型号折叠翼无人机,获取的主要性能指标如表1 所示。

表1 无人机集群发射主要性能指标
根据前述结构设计要求和计算方法,选用的电机型号为Y180M-2,电机和压簧的详细参数如表2和表3 所示。

表2 电机型号详细参数
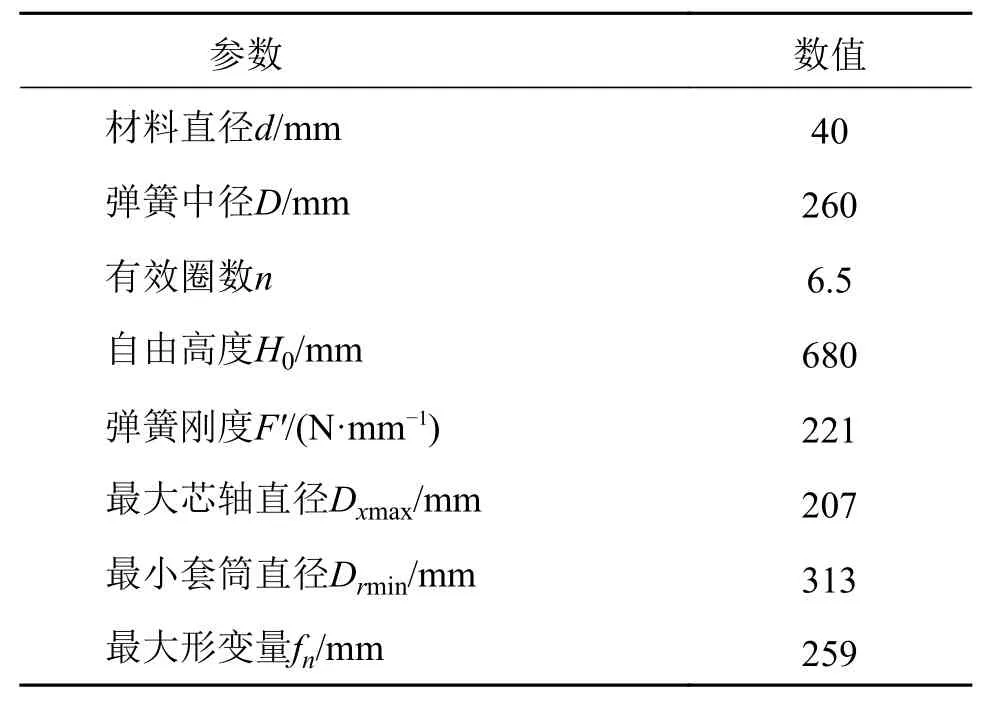
表3 压缩弹簧主要参数
通过分析无人机发射数量Q和发射频率f,设定输送盘转速ns=1 r/min,根据式(6)、式(7)和式(10),得出输出齿轮转速ny= 30、旋转轮转速nx= 7.5 和传动系统总传动比iz≈ 93.3。制定的传动比分配方案如表4 所示。
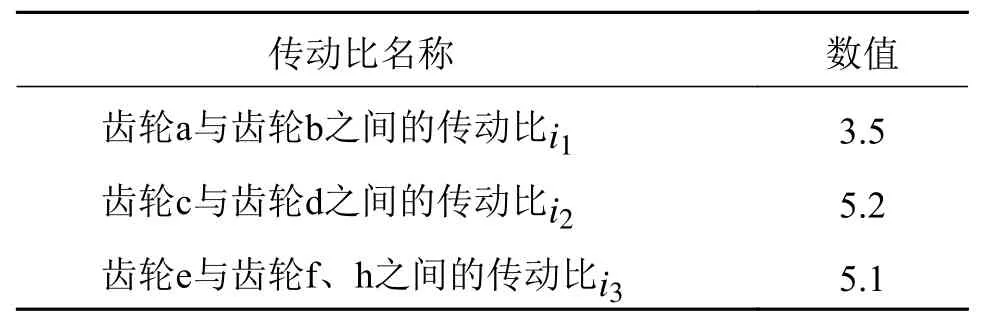
表4 传动系统传动比分配方案
根据电机、压缩弹簧和传动系统传动比的详细参数以及集群发射装置中各零件之间不同的组合方式、运动方向和接触类型,在软件内施加相应的驱动和不同种类的约束,对模型进行动力学建模,主要的约束关系如图10 所示。此外,发射机构、传动系统和电机在LMS 动力学模型中,均使用固定副安装在载盘上,并定义电机相应的额定转速作为模型的唯一驱动,最终的动力学模型如图11 所示。通过添加各种正确的约束,使集群发射装置的各部分零件良好的组合成一个完整的机构,用于后续的仿真分析。

图10 仿真模型主要约束关系

图11 集群发射装置动力学模型
4.2 仿真分析
上述仿真模型可以在软件中成功求解并获得预期效果,证明发射方案原理的准确性。其次对集群发射系统的仿真计算时间设置为6 s(发射3 架),得到的仿真结果如下:
1)电机输出转矩仿真结构
根据设计要求,选取的电机额定功率为22 kW,在对装置进行动力学建模仿真时,电机输出转矩Me仿真结果如图12 所示。
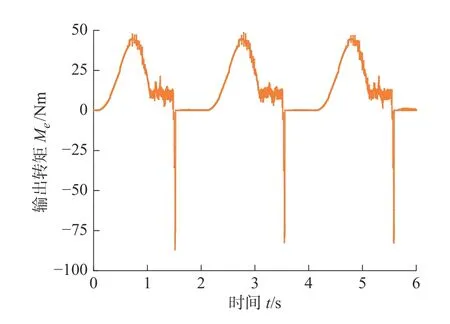
图12 电机输出转矩
从仿真结果看出,电机输出转矩Me的趋势峰值 为 45 Nm 左 右, 此 时 电 机 输 出 功 为在电机额定功率22 kW 范围内,电机功率满足设计要求。
2)输送机构运行过程仿真结果
输送盘转速ns设计要求为1 r/min,即在每个发射周期内,输送盘输送和静止的总时间约为2 s,其中的1.5 s 为弹簧压缩和卸载时间,在这1.5 s 内输送机构大齿圈不进行转动,其仿真结果见图13。
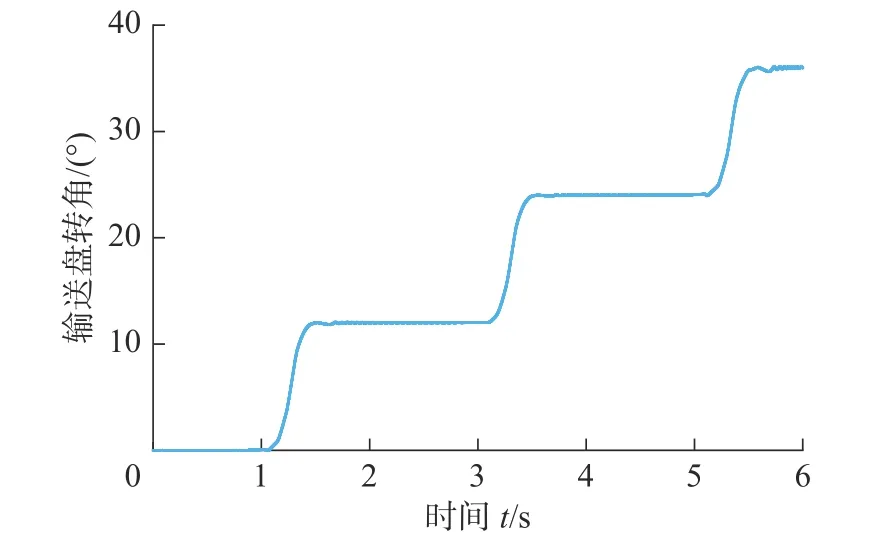
图13 输送盘转角曲线
从图13 中可以看出,输送机构输送盘以2 s 的相同时间间隔进行转动,在前0.5 s 的时间内转动角度为12°,后1.5 s 保持静止。由于没有设置缓冲机构,输送盘转动角度在转动停止时会有微小幅度的波动,随即回到正常角度,不影响整体发射效果。
3)无人机发射速度仿真结果
无人机集群发射装置最重要的是能够快速将无人机成功发射,对无人机出筒速度进行仿真分析,结果如图14 所示。

图14 无人机发射速度
可以看出,该集群发射装置在极短的时间内将3 架无人机发射,其出筒速度Vw瞬间达到了最大值28 m/s 左右,满足发射要求。
5 结论
与现有技术相比,该折叠翼无人机集群发射装置具有以下技术特点及优势:
1)该机械式集群发射装置在发射过程中不需要装填火药及清理工作,发射效率高,发射速度快,对无人机的冲击、损伤小。能够在路基、车载、飞行器和轮船等多平台实现安装,满足未来战场对无人机集群作战的需求。
2)通过结构设计和机构间的运动协调,避免了多套动力源和复杂的传感与控制方式可能引发的运动干涉问题,抵抗电磁干扰等战场干扰因素的能力强,可靠性强。
3)通过控制电机转速,实现输送机构和发射机构的变速运动,具有变频率发射的功能。
4)在电机的额定输出功率范围内,调整储能压簧的压缩程度,具有变发射速度和发射不同质量范围无人机类型的功能。
猜你喜欢
机械设计与制造(2021年7期)2021-07-26 03:11:34
装备制造技术(2020年1期)2020-12-25 05:18:10
重型机械(2020年3期)2020-08-24 08:31:50
航空维修与工程(2020年3期)2020-04-10 08:14:10
快乐语文(2018年7期)2018-05-25 02:32:15
潍坊学院学报(2017年2期)2017-04-20 08:44:17
大型铸锻件(2015年1期)2016-01-12 06:33:01
小说月刊(2015年9期)2015-04-23 08:48:23
人生十六七(2015年5期)2015-02-28 13:08:24
湖南大学学报·自然科学版(2014年2期)2014-12-25 14:06:15