
基于Bayes估计的受限空间探测数据融合算法
2023-05-21 04:02:58张伟利孙晓海韩成浩
吉林大学学报(理学版) 2023年3期
张伟利,杨 喆,孙晓海,刘 铭,韩成浩
(1.吉林建筑大学 网络信息中心,长春 130119; 2.吉林建筑大学 吉林省智慧城市与大数据应用工程研究中心,长春 130119; 3.吉林省消防救援总队 法制与社会消防工作处,长春 130031; 4.云南农业大学 大数据学院,昆明 650201; 5.长春工业大学 数学与统计学院,长春 130012)
多传感器信息融合方法能将多个传感器采集的信息相融合,获得对受限空间的全方位描述.但多传感器数据形式复杂,因此不同层次数据能否有效融合是该技术广泛应用的关键.目前,已有许多相关研究成果.吴会会等[1]提出了一种基于自适应模糊C均值聚类的数据融合算法,先将自适应系数引入到数据融合处理中,获取不同的聚类子集,再以聚类结果为基础,采用Kalman滤波原理估计误差协方差,实现数据融合; 王浩等[2]采用分层聚簇融合算法完成数据融合,先对传感器获取的初始数据做一级冗余处理,将有价值的数据发送给簇头节点,再通过灰色关联对簇内数据做二级融合; 敬如雪等[3]提出了一种基于多传感器的数据融合算法,先对数据进行一致性检验,以此剔除异常数据,再在数据处理的基础上,将自适应加权估计作为理论基础,进一步提升数据融合效果.虽然上述方法分别将数据融合技术应用于不同领域均取得了一定的成果,但仍存在一些局限性,如数据融合精度较低,数据融合时间较长等,影响了应用效果.
基于此,本文为增强数据融合质量,先对采集的数据进行滤波、限幅[4]等预处理,克服阶跃信号[5]的影响,加强抗干扰性; 再构建动态Bayes网络模型,制定数据融合目标函数,通过引入正态分布[6],实现数据融合.Bayes网络是一种信度网络,是在概率估计基础上生成的,能结合变量数据得出其他信息,具有独立性强、网络结构简单等优势,可有效解决数据不完整等问题.因此,本文在Bayes网络的基础上,研究受限空间的探测数据融合问题.
1 数据预处理
1.1 建立探测信号
虽然检测探测器输出信号是一项复杂的工作,但能从中发现特定的规律[7],将探测器采集的信号表示为X(t),该信号由显著信号Xf(t)和非显著信号Xn(t)构成:
X(t)=Xf(t)+Xn(t).
(1)
上述信号中可能包括各类噪声,影响数据的融合精度,所以本文通过数据预处理提高数据的利用率.
1.2 数据滤波
假设实际信号是Y(t),为去除瞬间干扰对探测器的影响,可利用微分信号[8]去除噪声,实际信号表示为
(2)
从而获得如下关系:

(3)
其中t0表示探测初始时间,t表示探测总时间.
1.3 限 幅
为改善探测信号的抗干扰性能,可对一段时间内的信号做限幅处理,X(t)可表示为
(4)
1.4 阶跃信号去除
探测信号通常存在阶跃性变化,为避免阶跃信号的影响,可将相同检测范围的信号X1(t)(i=1,2,…,n)以映射方式[9]表示为Mi(t),添加最大和最小变化率参数k,处理过程表示为

(5)
经过上述处理后,阶跃信号被有效去除,探测信号得到优化.
1.5 数据信号归一化处理
因为不同类型探测器的工作原理不同,所以特征参数量纲与大小均不相关,无法直接融合.为保证不同参数在数据融合中具有相同作用,必须对信号数据进行归一化处理,使数据具有相关性,便于信息融合.归一化公式为
(6)
其中Aj表示参数j输入的归一化值,xj表示参数j的输入值,Mj为j的标准门限[10],L表示信号采样长度,Ij表示参数j的归一化自相关系数,F表示信号复杂度.
2 受限空间探测数据融合
2.1 建立数据融合架构
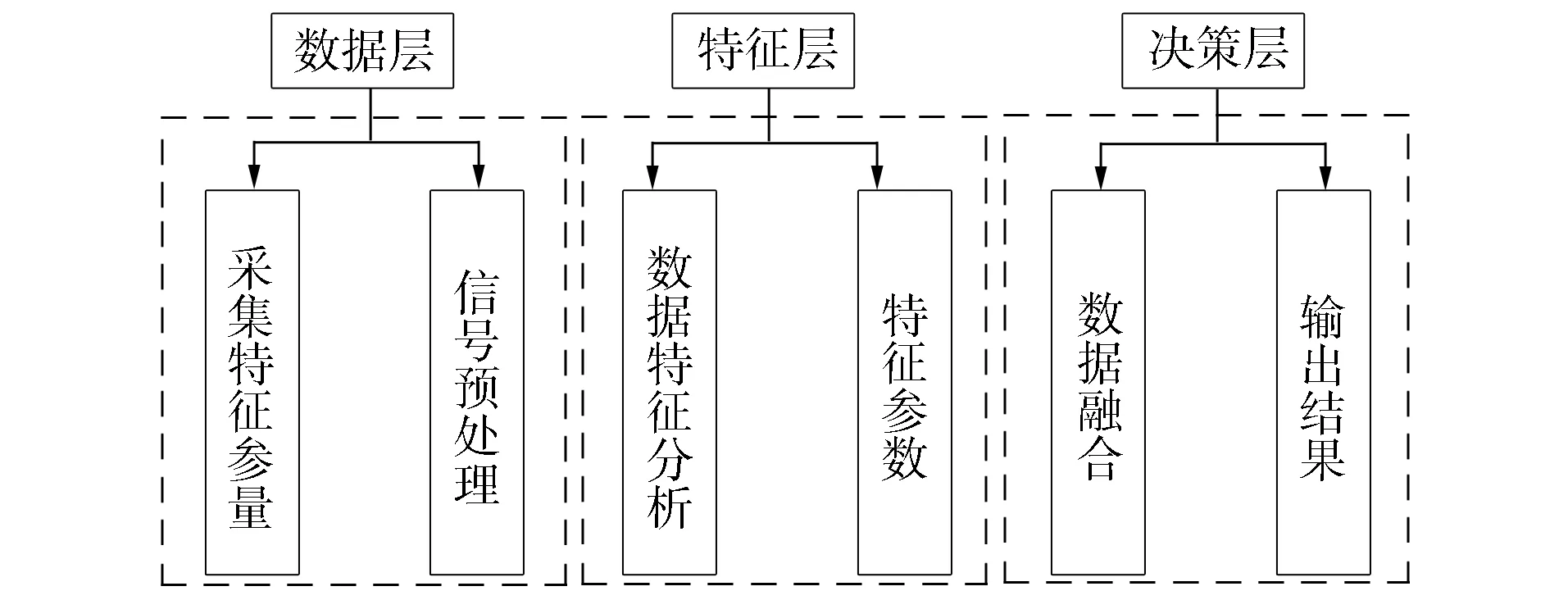
图1 数据融合架构示意图Fig.1 Schematic diagram of data fusion architecture
目前,多数数据融合算法处理方式简单,缺乏智能性,不能对探测信息作出有效地综合分析与处理,系统灵敏度[11]与探测准确性之间的矛盾突出.因此,本文结合Bayes估计算法特征,建立一种包含数据层、特征层与决策层的数据融合结构.图1为数据融合架构示意图.
1) 数据层: 利用各类探测器采集特征参量[12],同时对信号做预处理,变换为Bayes网络能识别的数据.如果各类参数值超出安全范围,则提取该数据供特征层使用,进一步排除数据干扰.
2) 特征层: 分析数据特征,将变化明显的数据作为特征参数.
3) 决策层: 将特征层显示的融合结果和其他有关信息做融合处理,输出系统决策结果.在环境干扰较大的情况下,估计环境干扰因子[13],并以此为根据提高探测结果的精准度.
2.2 构建动态Bayes网络
通常状态下探测出的变量具有时变性,即系统为动态的[14].动态Bayes网络以概率网络为基础,融合时间信息,构成具有处理时序的模型.此处动态表示模型系统为动态的,并不是网络结构具有的动态特征.
(H1) 假设在固定时间内,条件概率变化平稳且一致;
(H2) 假设动态过程符合Markov理论:
P(X′(t+1)|X′(1),X′(2),…,X′(t))=P(X′(t+1)|X′(t)),
(7)
其中P表示转移概率.

(8)
2.3 确定数据融合目标函数
要达到更好的融合效果,需利用上述Bayes网络模型,并结合已有节点观测值Z进行估计,获得n维状态矢量X′的后验概率,为提高数据融合精度,构建融合目标函数p(Z|X′).
假设X′的先验概率P(X′=x′)与目标函数之间相互独立,此时Z=z,则X′=x′的后验条件概率表示为

(9)
其中x′表示状态矢量的预估计,z表示观测值的估计值.从而获得融合目标函数为

(10)
2.4 添加正态分布的Bayes数据融合算法
在用Bayes网络融合数据过程中,引入如下正态分布模型:

(11)
其中σ表示探测值存在的不确定性.假设Z和X′均为似然函数,则有

(12)
其中K=1,2分别表示第一个与第二个节点.结合目标函数,可得融合最大后验概率为

(13)
经过推导,可得:

(14)
当传感器较多时,易发生融合异常现象,假设相同时间内不同传感器之间的数据均呈现“两两相遇”的情形,则对两个不同探测功能的传感器进行数据融合方式为: 假设节点状态正常事件S=0,模型为p(Z=z|X′=x′,S=0),如果节点都满足正态分布,则节点z1的融合公式表示为

(15)
其他节点的数据融合方法同理.
3 仿真实验数据分析
为验证本文算法的数据融合效果进行仿真实验.以MATLAB为仿真实验软件,对实验中的数据进行统计与处理,同时,为保证实验结果的有效性与准确性,需保证其他实验条件一致.
火灾通常发生在受限空间内,是因失控燃烧导致的灾害.可燃物与火源是火灾发生的关键因素,在燃烧时产生的物理和化学现象能被探测到,可根据探测得到灾情的有关信息,从而对火场环境作出相应的分析和处理,以实现准确、及时预警.因此,本文以火灾探测数据为研究对象,验证本文方法对火灾探测数据的融合效果.
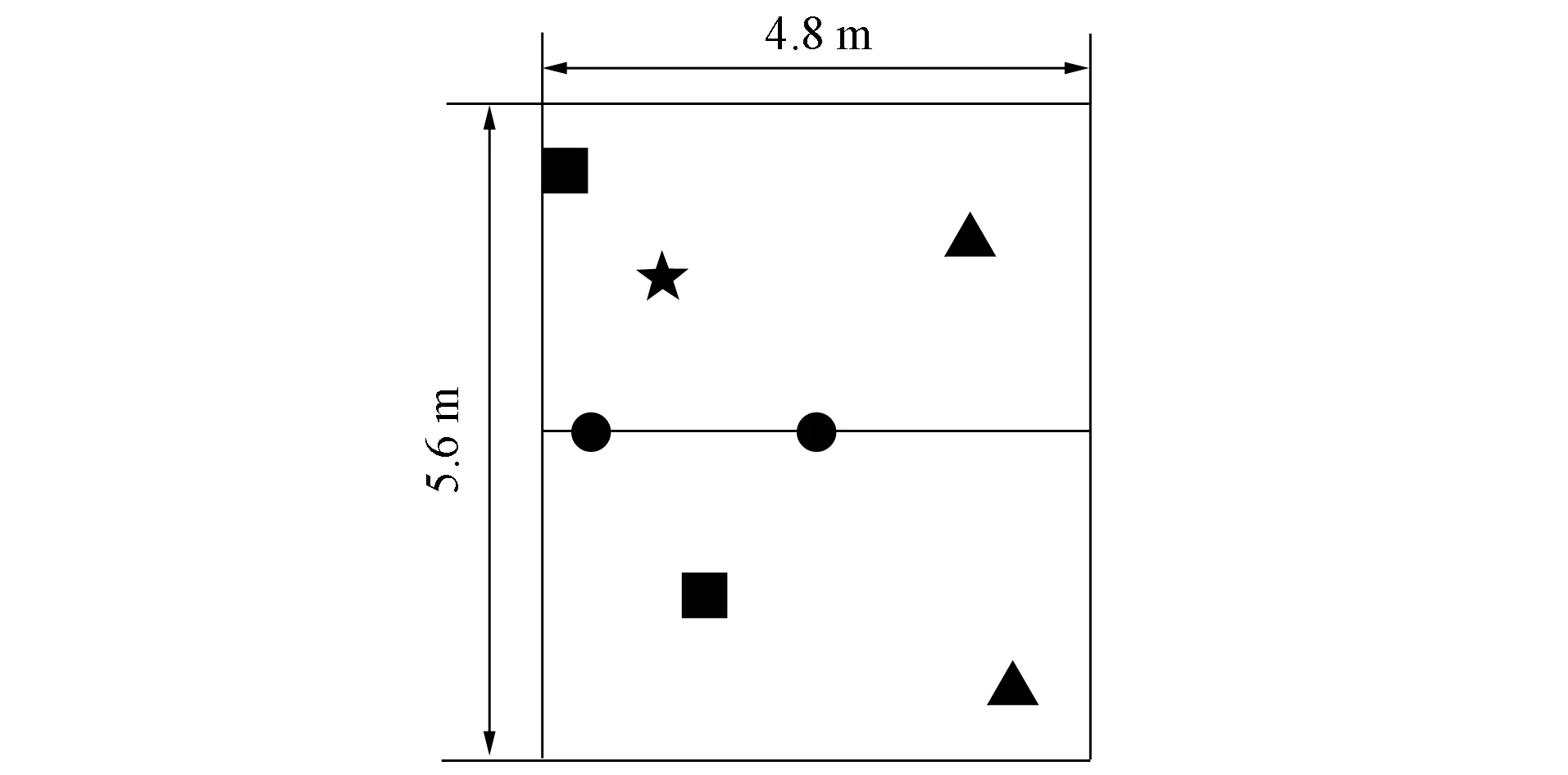
■感温探测器; ●感烟探测器; ▲一氧化碳探测器; ★火源.图2 仿真环境示意图Fig.2 Schematic diagram of simulation environment
实验所选传感器类型如下.感温探测器: 利用热敏元件达到探测目的,当火灾发生时会释放大量热量,使温度快速上升,这种探测器包括定温式和差定温式等,本文实验选择定温式.感烟探测器: 是感应燃烧产生液体微粒的探测器,可获取火灾初期生成的烟雾粒子浓度,本文选取离子型探测设备.一氧化碳探测器: 正常情况下,室内几乎不存在一氧化碳,但当火灾发生时,气体中的一氧化碳浓度上升较快,对其含量探测,能达到火灾预警要求.
结合上述3种传感器的功能,本文对每种传感器选取两个进行仿真实验.受限空间和探测器摆放位置如图2所示.实验中将杨木视为关键燃烧材料,因其资源丰富,在建筑、家具中被广泛使用.杨木尺寸选择30 mm×30 mm×500 mm的木条.首先,利用本文算法对3种探测器采集的信号做预处理,处理结果分别如图3~图5所示.
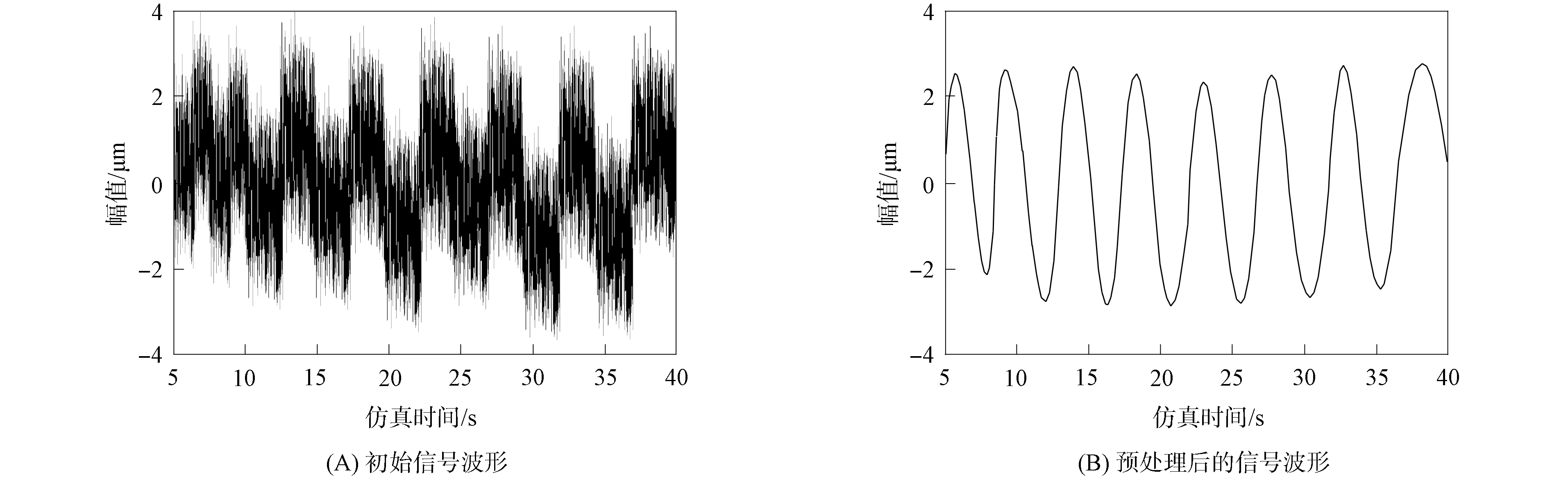
图3 感温探测器信号处理结果Fig.3 Signal processing results of temperature detector
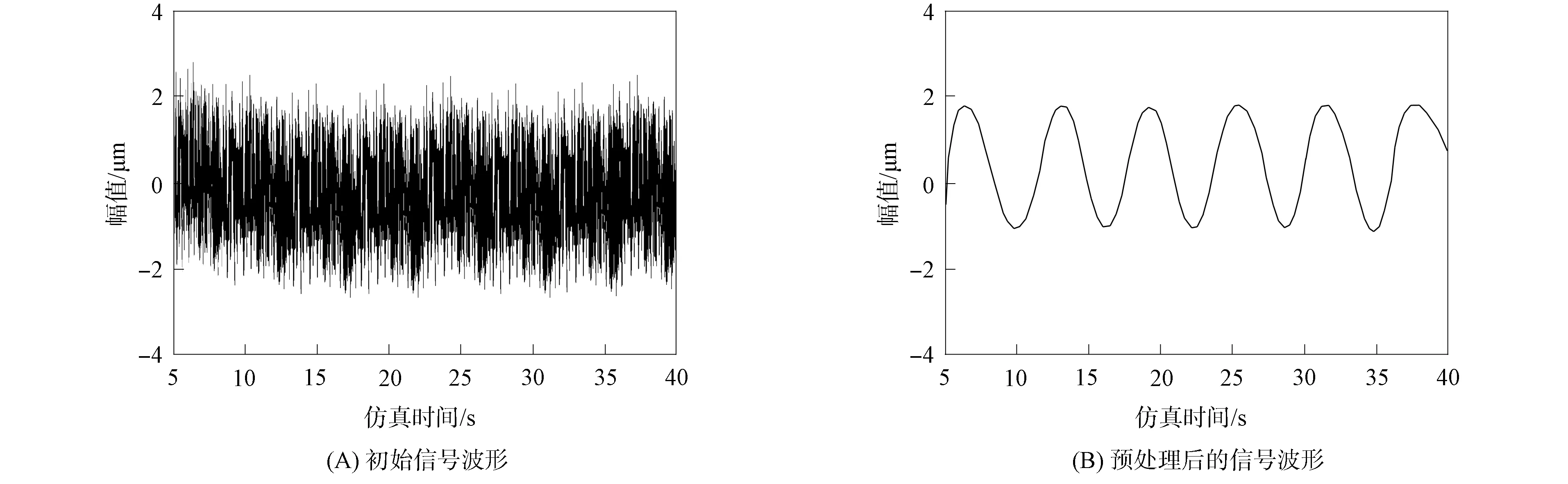
图4 感烟探测器信号处理结果Fig.4 Signal processing results of smoke detector
由图3~图5可见,3种传感器采集到的初始信号中均存在不同程度的噪声,利用本文算法对信号进行去噪和限幅处理,能获得清晰的信号波形,且将幅值限定在一定范围内,从而提高数据质量,减少数据冗余,避免了冗余数据对数据融合效果产生的负面影响.这是因为本文算法为避免阶跃信号的影响,将相同检测范围的信号以映射方式进行表示,使阶跃信号被有效去除,优化了探测信号.
数据融合效果最终体现在火警预报性能中,利用构建的动态Bayes网络对上述采集的数据进行融合,将漏报次数作为评价指标,并与模糊神经网络融合和分层聚簇融合算法进行对比,实验结果如图6所示.由图6可见,本文算法的整体漏报次数较少,始终低于3次,甚至个别月份未出现漏报现象.而对比算法的漏报次数最多为15次,这是因为探测器采集的信号没有经过适当处理,当各传感器数据相互融合后,不能最大程度体现火灾特征,影响了判断结果.此外,Bayes模型具有较强的动态性,探测数据是不断变化的,因此该模型更适用于动态数据融合.为进一步验证本文算法的有效性,以数据融合效率为实验指标,进一步对上述3种算法进行对比,结果如图7所示.
图5 一氧化碳探测器信号处理结果Fig.5 Signal processing results of carbon monoxide detector
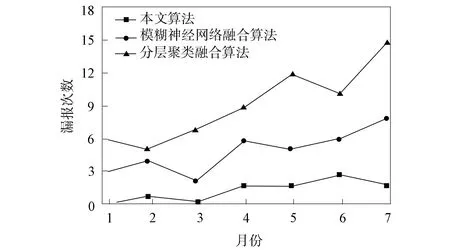
图6 不同数据融合算法的火灾漏报次数对比Fig.6 Comparison of number of fire missed reports of different data fusion algorithms
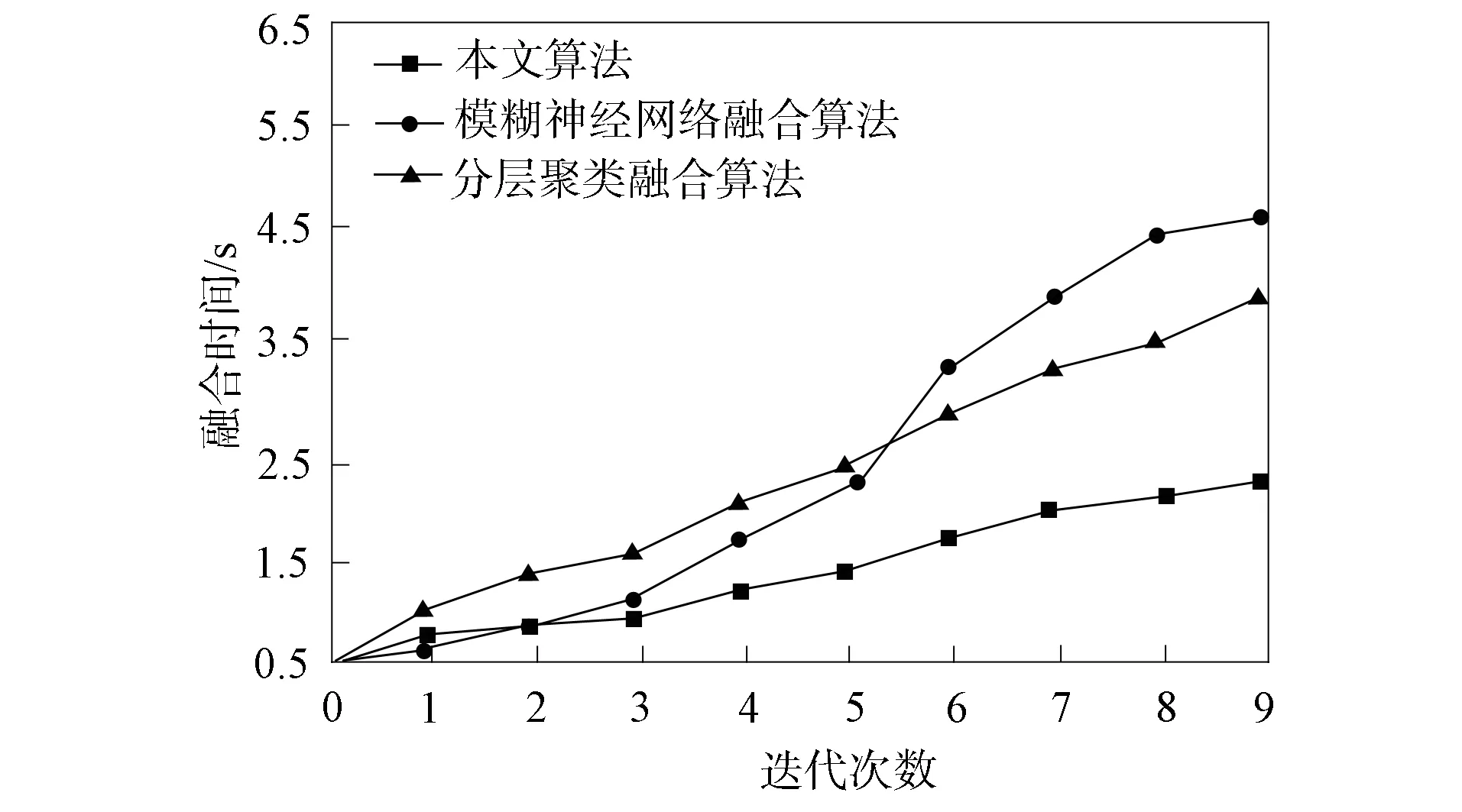
图7 不同算法数据融合效率对比Fig.7 Comparison of data fusion efficiency of different algorithms
由图7可见,采用本文算法对数据进行融合时,随着迭代次数的增加,数据融合时间呈现逐渐增加的趋势,虽然迭代次数低于2次前,本文算法的数据融合时间略高于模糊神经网络融合算法,但在整体上,本文算法的数据融合时间远低于对比算法,其数据融合时间最高值仅为2.4 s.因此,本文算法的数据融合效率较高,这是因为该算法通过数据滤波、数据信号归一化处理等操作对数据进行了预处理,为数据融合提供了可靠的数据基础,使本文算法的数据融合效率得到有效提升.
综上所述,为提高数据融合效果,使融合后的数据能应用在实际场景中,本文提出了一种基于Bayes估计的探测数据融合算法.首先,为减少融合误差,对初始数据进行滤波、归一化等处理,确保了融合的有效性; 其次,建立Bayes动态模型及融合目标函数,根据正态分布函数完成数据融合,有效提升了数据融合精度; 最后,将相同检测范围内的信号以映射的方式进行表示,有效去除了阶跃信号,使探测信号得到了优化.在实验验证阶段,以火灾数据为研究对象,分析了本文算法的数据融合效果.实验结果表明,在本文算法的支持下火灾漏报次数明显降低,提高了数据质量,减少了数据冗余.
猜你喜欢
黑龙江大学自然科学学报(2021年4期)2021-11-19 07:05:06
小学科学(2020年1期)2020-02-18 06:26:40
百科探秘·航空航天(2020年12期)2020-01-22 08:57:19
小学科学(2019年12期)2019-01-06 03:38:45
天津教育·下(2018年9期)2018-07-13 08:25:47
作文评点报·低幼版(2017年8期)2017-03-11 18:34:44
文理导航·趣味课堂(2016年6期)2016-09-09 23:29:34
太空探索(2014年9期)2014-07-10 13:06:30
电力自动化设备(2013年11期)2013-09-18 02:55:14
电气电子教学学报(2012年1期)2012-10-12 03:27:48
