
附有伪距电离层估计的实时精密单点定位方法
2023-04-28 06:20贾恒杰杨英仪
导航定位学报 2023年2期
贾恒杰,杨 帆,杨英仪,崔 宫
附有伪距电离层估计的实时精密单点定位方法
贾恒杰,杨 帆,杨英仪,崔 宫
(广东电网有限责任公司 韶关供电局,广东 韶关 512000)
针对现有实时精密单点定位(PPP)方法解算精度较低的问题,提出一种附有伪距电离层估计观测值P1ION的实时PPP方法:将无电离层(IF)组合及伪距电离层估计观测值(P1ION)相结合,并与传统的无电离层组合模型(IF-PPP)和非差非组合模型(UC-PPP)进行对比和分析;然后,通过国际全球卫星导航系统服务组织(IGS)的最终精密产品评估法国空间研究分析中心(CNES)的实时数据流产品(CLK93),包括卫星轨道、钟差改正数和实时电离层产品。实验结果表明,全球定位系统(GPS)和伽利略卫星导航系统(Galileo)轨道和时钟改正精度优于格洛纳斯卫星导航系统(GLONASS)和北斗卫星导航系统(BDS);相对于IGS电离层联合分析中心(IAACs)最终全球电离层产品(GIM),不同分析中心的实时电离层产品垂直总电子含量(VTEC)估计的标准差(STD)和均方根(RMS)分别为1.9~2.3个总电子含量单位(TECU)和1.9-3.2 TECU;与IF-PPP和UC-PPP相比,附加实时电离层产品约束的IF-PPP+P1ION方法的定位精度在东(E)、北(N)、天(U)方向分别提高了14.0%、3.7%和11.2%。
精密单点定位(PPP);电离层延迟;伪距电离层观测值;伪距电离层估计
0 引言
全球卫星导航系统(global navigation satellite system,GNSS)具有全球、全天候、高精度等优点,已广泛应用于大地测量、精准农业、大众出行等领域。精密单点定位(precise point positioning,PPP)仅需单台接收机和卫星精密轨道和钟差等精密产品,即可在全球范围实现厘米级高精度定位,具有操作方便、机动灵活等优点,逐渐成为GNSS研究热点之一[1]。为满足实时PPP用户的应用需求,国际GNSS服务组织(International GNSS Services,IGS)实时服务(real-time service,RTS)于2013年4月1日正式启动[2]。IGS RTS提供对实时GNSS观测数据和状态空间域(state space representation,SSR)精密产品的实时数据流访问。通过IGS RTS,用户利用SSR产品可以在全球范围内实现实时PPP。IGS RTS第二阶段规划实时电离层产品垂直总电子含量(vertical total electron content,VTEC)的播发和服务。目前,仅有法国空间研究中心(Centre National d'Etudes Spatiales,CNES)播发实时VTEC产品。
PPP数据处理模型主要包括无电离层PPP组合模型(ionospheric-free PPP,IF-PPP)和非差非PPP组合模型(uncombined PPP,UC-PPP)。无电离层组合模型可以消除电离层延迟的一阶项,但观测值组合导致多路径和观测噪声被放大约3倍,卫星观测信息减半。为了避免无电离层组合模型的不足,Keshin提出了直接使用原始观测值的非差非组合模型,将电离层延迟作为参数估计[3]。UC-PPP相对于IF-PPP具有更小的多路径和观测噪声,可以充分利用观测信息[4]。同时,UC-PPP不仅可以提供高精度的定位服务,还保留了对流层延迟和电离层延迟等大气信息[5]。但是,由于电离层延迟估计参数的增加,UC-PPP的初始化时间仍然较长,并导致双倍的内存压力和更高的中央处理器(central processing unit,CPU)占有率。
本文提出将无电离层组合及伪距电离层估计观测值(code ionospheric-estimated measurement,P1ION)相结合的实时PPP定位方法,通过附加实时电离层延迟约束增加冗余观测并提高新方法的性能。
1 PPP函数模型
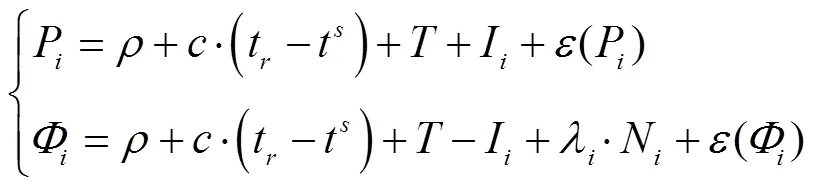
对于PPP,伪距和载波相位的观测方程为[6]

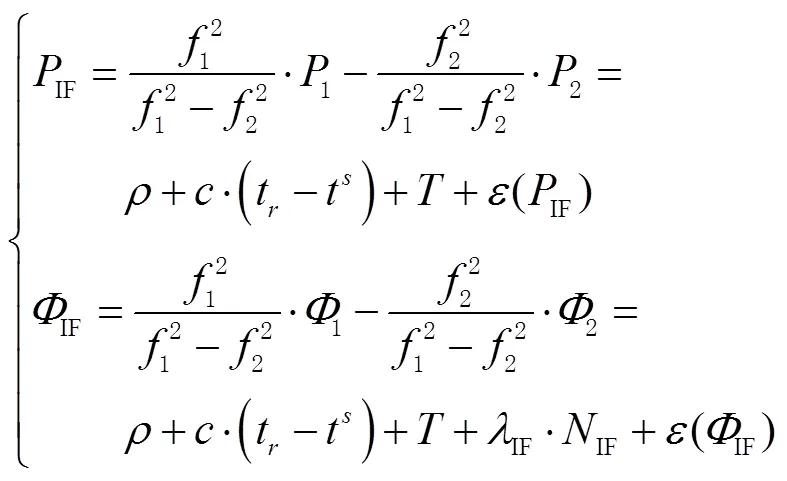
无电离层组合模型通过观测值线性组合来消除电离层延迟一阶项的影响,因此无电离层组合模型的观测方程为[7]
2 IF-PPP+P1ION模型
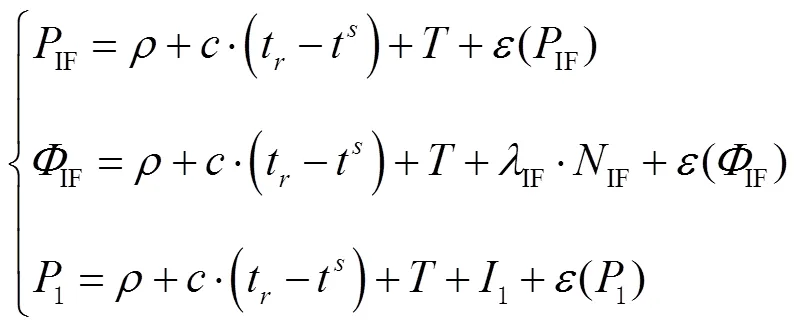
式(3)与式(1)相比,多路径和观测噪声都被放大。因此,传统的IF-PPP需要约20~30 min的时间才能收敛到厘米级精度[9]。因此,单频电离层伪距观测值可以表示为

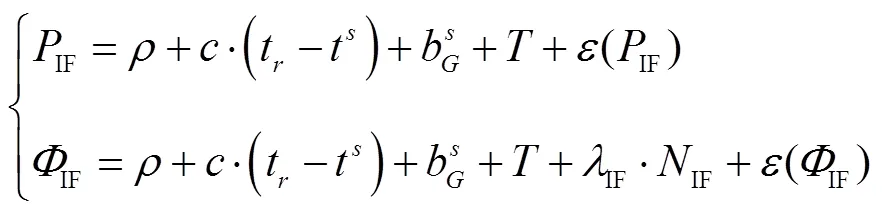
从CNES CLK93得到的实时轨道、钟差和伪距码偏差(differential code bias,DCB)误差改正后,进一步表示为

3 实验与结果分析
3.1 数据采集与解算策略
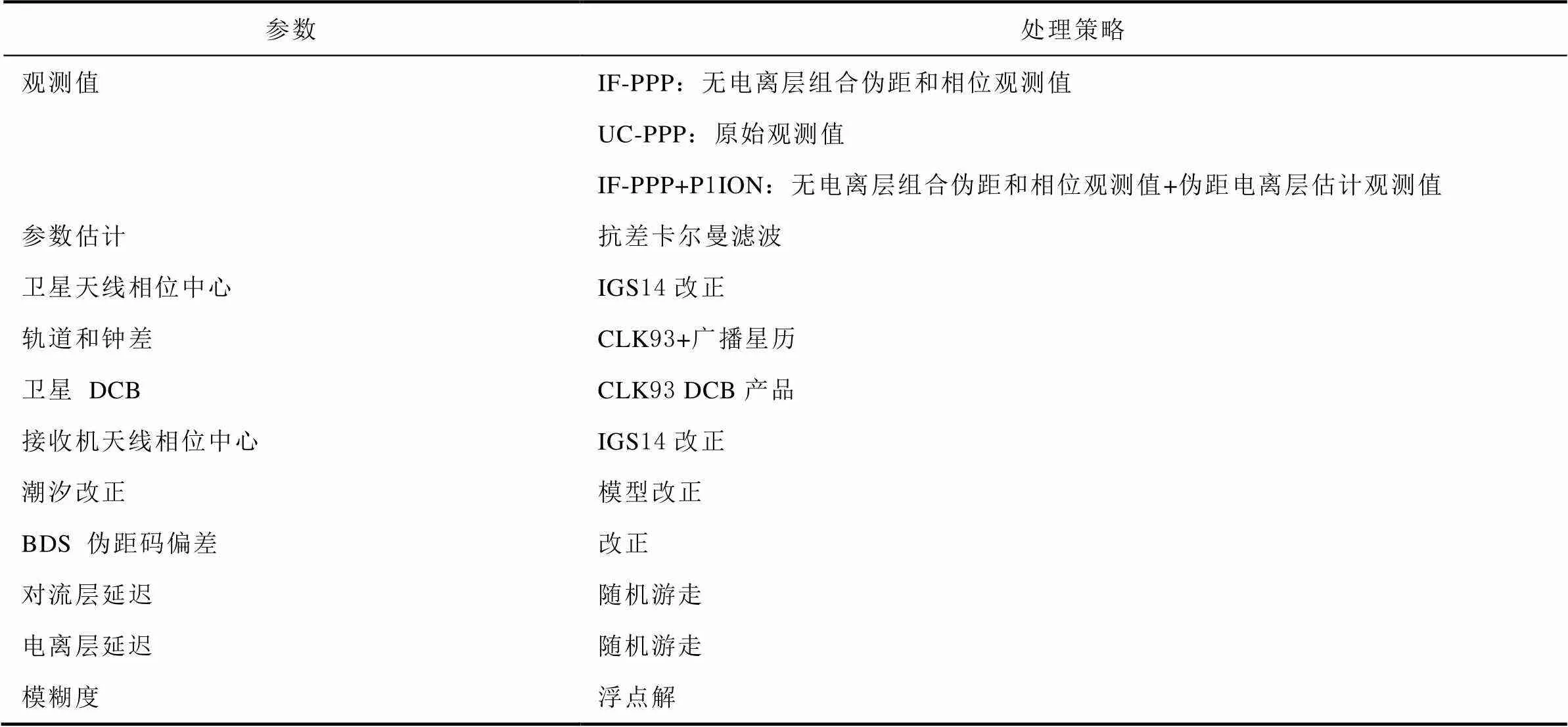
本文基于甘普(GAMP)开源软件,开发并实现实时IF-PPP+P1ION的定位功能[11]。首先,实验收集2020年年积日(day of year,DOY)第334—347天的多系统GNSS数据流和 CNES CLK93产品[11]。然后通过德国地学研究中心(German Research Centre for Geosciences,GFZ)的精密轨道和钟差产品评估CLK93实时轨道和钟差改正数的精度。最后,基于新方法和RTS数据流和精密产品,对比分析传统IF-PPP、UC-PPP和新方法的实时定位性能。由于CLK93轨道改正数参考卫星天线相位中心(antenna phase center,APC),因此不再改正卫星天线相位中心偏差(phase center offset,PCO),同时改正BDS-2的伪距码偏差[12]。详细解算策略如表1所示。

表1 实时PPP数据处理策略
(续)
3.2 实时轨道钟差改正数
PPP性能的主要依赖于SSR改正数的精度。CNES的CLK93改正由BKG NTRIP Caster(BNC)软件从2020年DOY第334天—347天接收[13],是目前唯一同时包括GPS、GLONASS、Galileo和BDS系统的产品。考虑到SSR产品的可用性,只有当卫星的改正数可用率达到90%才进行对比分析。轨道误差在径向(R)、切向(A)和法向(C)上的分量和钟差估计误差()对比的时间间隔为5 min。由于北斗静止地球轨道卫星(geostationary Earth orbit,GEO)C01~C05卫星轨道和钟差精度较差,本文不对GEO卫星进行分析。图1给出了轨道误差三维分量和钟差改正数的均方根(root mean square,RMS)值。同时,不同GNSS系统RMS值以及实时轨道和钟差的空间用户测距误差(signal in space user ranging error,SISRE)如图2所示[14]。
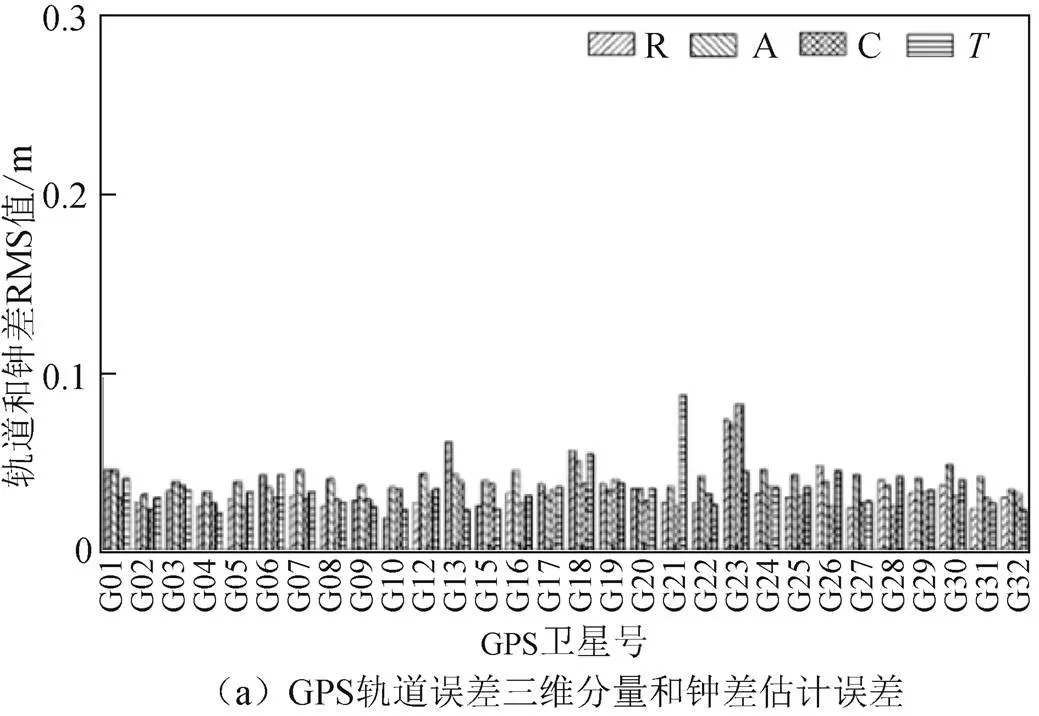
对于GPS卫星,在R方向中约为3.5 cm,在C和A方向上为4.0 cm。与GFZ精密钟差相比,钟差的RMS约为2.7 cm。同时,G21的钟差存在异常,G23的轨道和钟差也存在异常。总体而言,CLK93中GPS的轨道和钟差改正数精度最高。对于GLONASS,轨道RMS值分别为5.0、9.9和7.7 cm,钟差RMS约为7.4 cm。同时,可以看出R13、R19和R20存在异常。对于Galileo,轨道R、C和A方向的RMS分别为3.2、5.8和4.3 cm,钟差RMS值为2.8 cm。然而,BDS倾斜地球同步轨道卫星(inclined geosynchronous orbit,IGSO)(C06~C10)轨道RMS值分别约为11.1、15.3和13.7 cm,而MEO(C11~C37)轨道改正数精度相对较高,约为6.1、14.2和9.2 cm,钟差RMS值为10.6 cm。
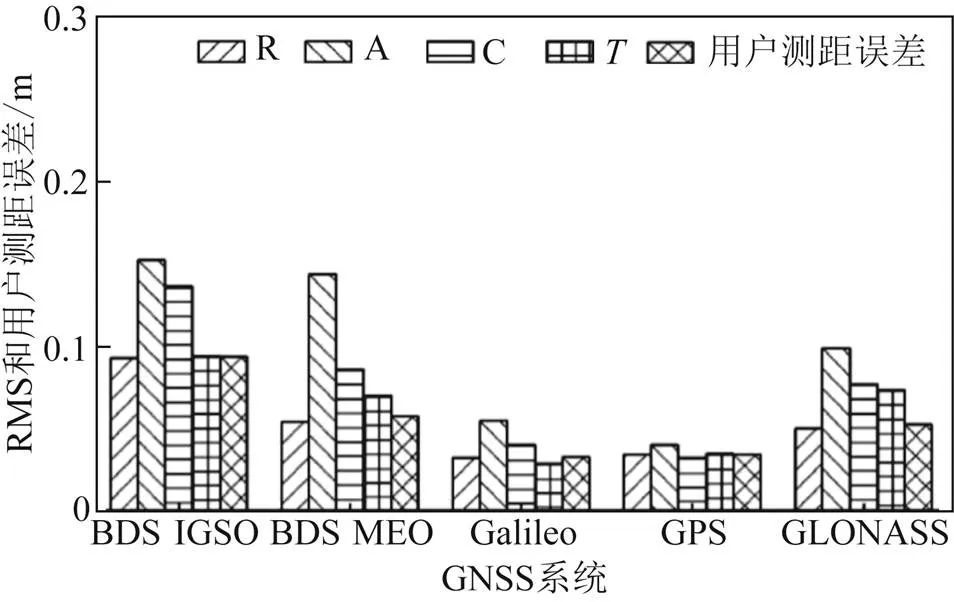
图2 不同GNSS系统轨道误差在径向、切向和法向上分量和钟差的RMS和SISRE值
由图2中可以发现,GPS的SISRE约为 3.1 cm,是4个GNSS系统中最小的,表明GPS轨道和钟差改正数的精度最高。Galileo和GLONASS的SISRE分别为3.3和4.5 cm,而BDS IGSO和MEO的SISRE值分别约为10.2和6.0 cm。考虑到SISRE值和其他因素(如多路径和观测噪声),本文中将 GPS、Galileo、GLONASS、BDS IGSO和BDS MEO之间的伪距观测值权因子设置为1、3、3、5、5,而载波相位观测值等权处理[15]。
3.3 实时电离层产品
在海事无线电技术委员会(Radio Technology Committee of Marine,RTCM)协议中,实时电离层产品通过球谐函数来描述,每层VTEC的变化被认为是平滑的。虽然球谐函数不能捕捉VTEC的细微变化,但占用内存更少,更容易通过Internet播发。计算VTEC 改正为[9]

从表2中可以看出,CNES实时电离层总体上与IAACs的最终GIM产品非常一致。VTEC差异的标准差(standard deviation,STD)值为1.9~2.3个总电子含量单位(total electron content unit,TECU),RMS值为1.9~3.2个TECU。此外,分析中心的产品CASG、CODG、ESAG、UPCG、WHUG和IGSG的VTEC的平均RMS约为1.9~2.5个TECU,但相对于JPLG约为3.2个TECU。同时,CNES实时VTEC相对于CASG和CODG的STD和RMS均小于2个TECU,可能因为都采用了球谐函数模型。
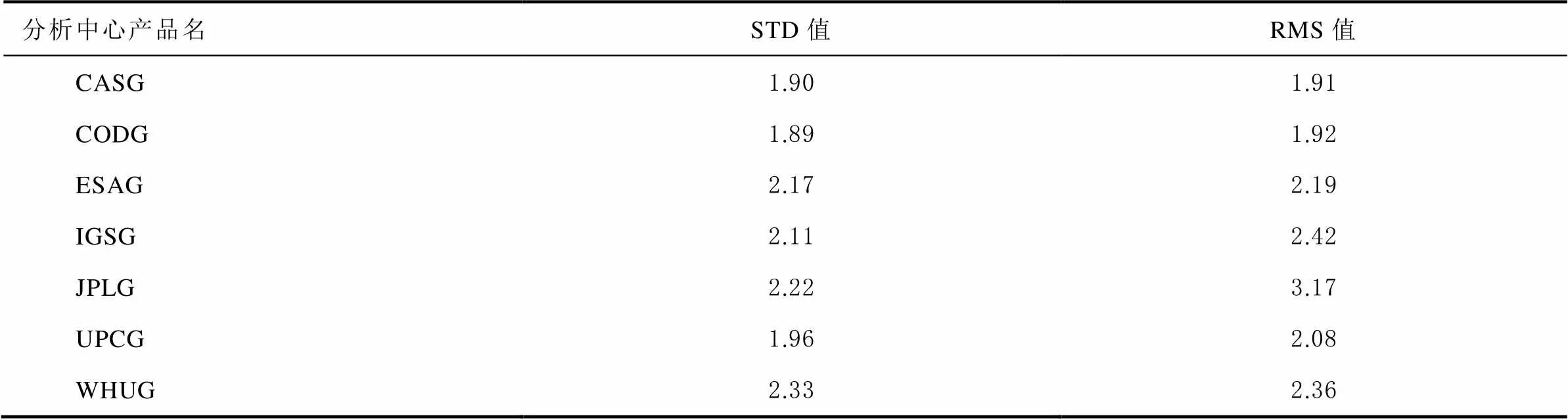
表2 VTEC对比RMS值(总电子含量单位)
3.4 实时定位精度分析
本小节选取18个全球GNSS数据流在2020年DOY第334—347天的观测数据流进行分析,数据流分布如图3所示。根据表1中的解算策略,分析仿动态下不同PPP方法的性能。每个数据流的数据处理采用GPS+GLONASS+Galileo+BDS组合和3种PPP模式,即IF-PPP、UC-PPP、IF-PPP+P1ION。将数据处理结果与IGS SINEX发布的“真实”坐标进行对比分析;同时分析IF-PPP+P1ION附加实时电离层产品的定位性能。附加电离层约束的详细策略参照文献[16]。
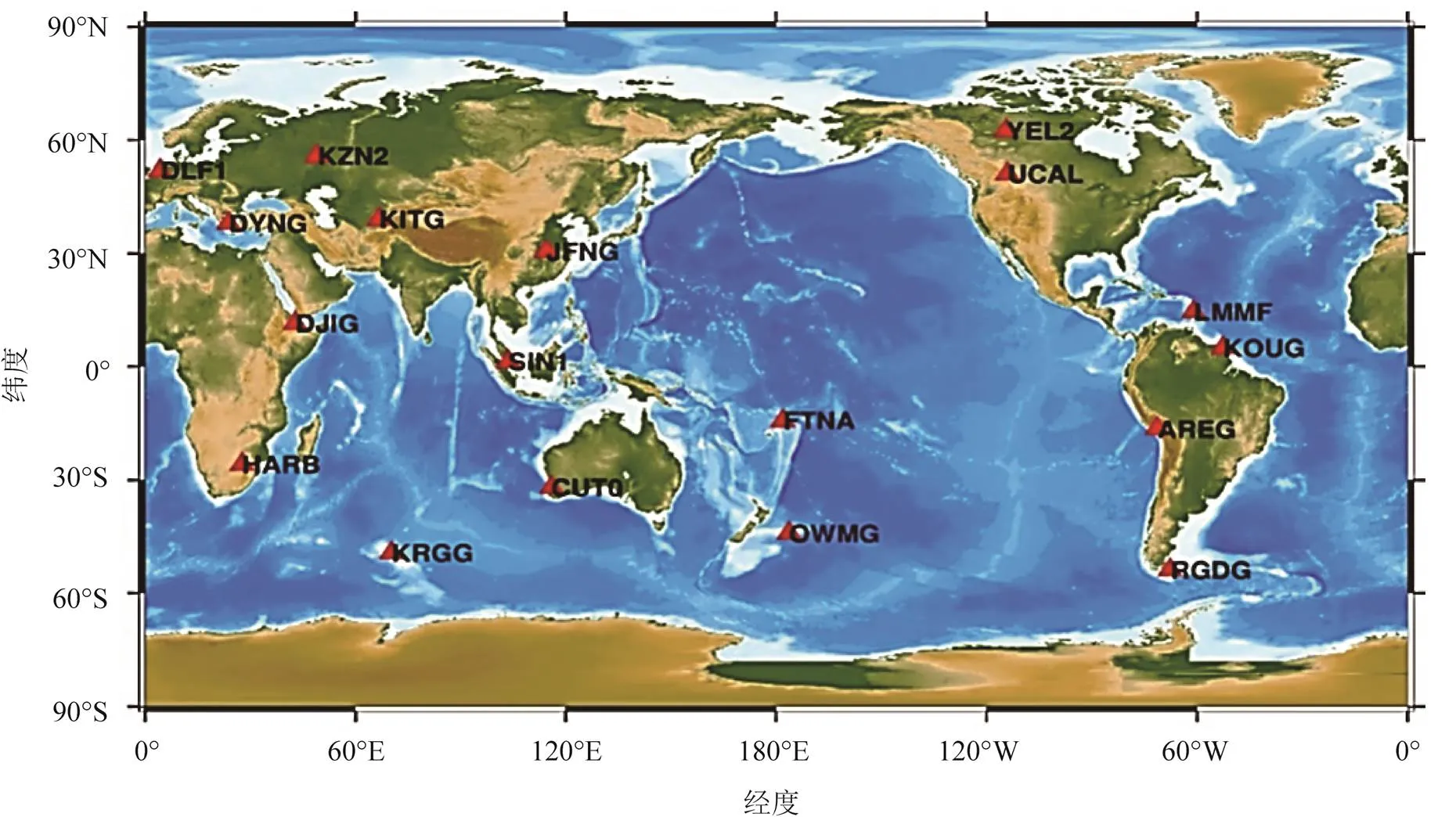
图3 全球GNSS数据流测站分布
以DOY第334天为例,DJIG测站定位误差序列如图4所示。从图4可以看出,DJIG测站UC-PPP在东(E)、北(N)和天(U)方向分量的RMS约为2.4、1.9和4.2 cm,比IF-PPP要好。附加实时电离层约束的IF-PPP+P1ION相比传统IF-PPP和UC-PPP具有更高的定位精度。所有测站的定位精度平均值统计结果如表3所示。可以看出,IF-PPP方法的RMS在E、N和U方向分别约为2.49、1.91和4.26 cm。同时,UC-PPP的结果优于IF-PPP,RMS分别为2.36、1.83和4.14 cm。与常规IF-PPP相比,附加实时电离层约束的IF-PPP+P1ION分别提高了约14.0%、3.7%和11.2%。
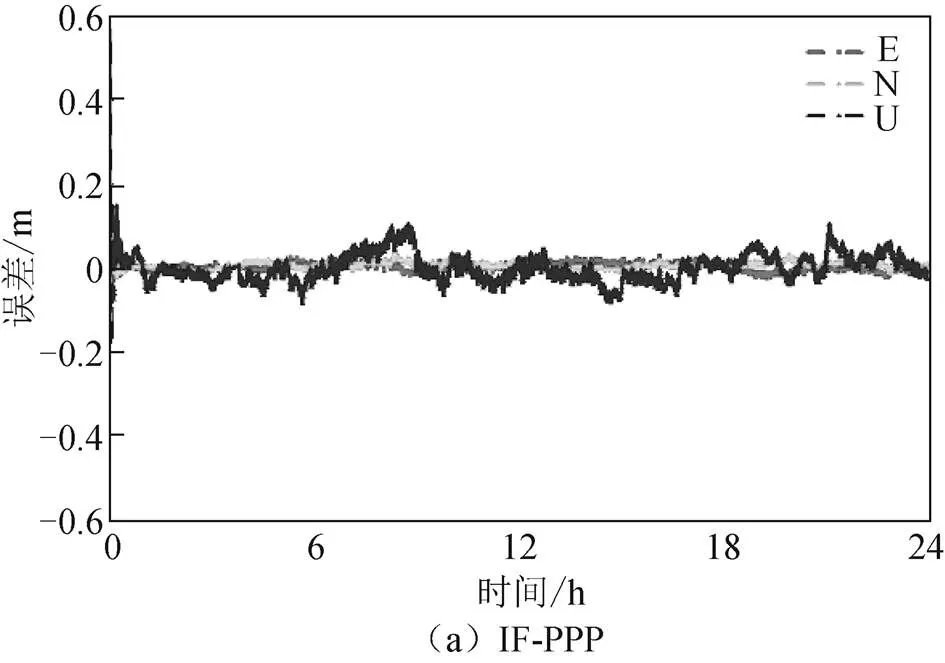
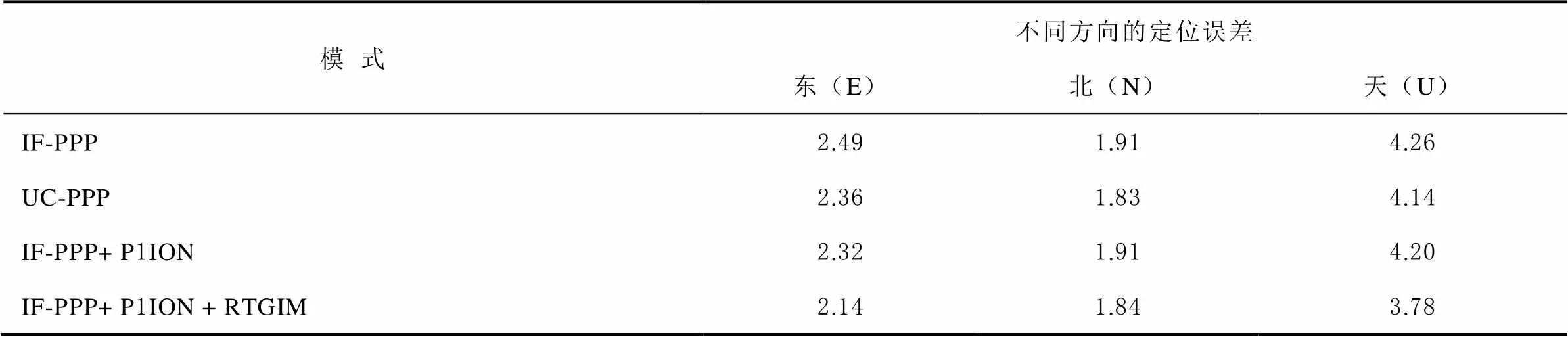
表3 所有测站实验定位误差RMS统计 cm
4 结束语
本文提出了伪距电离层观测值(P1ION)与IF组合的新PPP模型,新模型不需要考虑接收机DCB,还可以通过外部电离层延迟约束改善定位精度;然后通过CNES CLK93产品以及数据流来验证和分析实时PPP的性能。
结果表明,GPS和Galileo轨道钟差改正数精度最好,GPS、GLONASS、Galileo、BDS IGSO和BDS MEO的SISRE分别约为3.1、4.5、3.3、10.2和6.0 cm,可为实时PPP数据处理中的定权策略提供参考。同时,不同分析中心的实时VTEC估计的STD和RMS分别为1.9~2.3个TECU和1.9~3.2个TECU。通过分析不同方法PPP的性能,UC-PPP的RMS在E、N和U分量上分别约为2.36、1.83和4.14 cm,优于IF-PPP。当附加实时电离层延迟约束时,提出的方法在3个方向上分别提高了14.0%、3.7%和11.2%。
[1] 刘经南,叶世榕. GPS非差相位精密单点定位技术探讨[J]. 武汉大学学报(信息科学版), 2002, 27(3): 234-240.
[2] CAISSY M, AGROTIS L, WEBER G, et al. Coming soon: the international GNSS real-time service[J]. GPS World, 2012, 23(6): 52-58.
[3] 辜声峰. 多频GNSS非差非姐合精密数据处理理论及其应用[D]. 武汉:武汉大学, 2013.
[4] LIU T, YUAN Y B, ZHANG B C, et al. Multi-GNSS precise point positioning (MGPPP) using raw observations[J]. Journal of Geodesy, 2017, 91(3): 253-268.
[5] 李玮, 程鹏飞, 秘金钟. 利用非组合精密单点定位提取区域电离层延迟及其精度评定[J]. 武汉大学学报(信息科学版), 2011, 36(10): 1200-1203.
[6] 李星星. GNSS精密单点定位及非差模糊度快速确定方法研究[D]. 武汉: 武汉大学, 2013.
[7] LI X X, ZHANG X H, REN X D, et al. Precise positioning with current multi-constellation global navigation satellite systems: GPS, GLONASS, Galileo and BeiDou[J]. Scientific Reports, 2015, 5: 1-14.
[8] 张小红, 李星星, 李盼. GNSS精密单点定位技术及应用进展[J]. 测绘学报, 2017, 46(10): 1399-1407.
[9] NIE Z X, YANG H Z, ZHOU P Y, et al. Quality assessment of CNES real-time ionospheric products[J]. GPS Solutions, 2019, 23(1): 1-15.
[10] MONTENBRUCK O, STEIGENBERGER P, PRANGE L, et al. The multi-GNSS experiment (MGEX) of the international GNSS service (IGS)-achievements, prospects and challenges[J]. Advances in Space Research, 2017, 59(7): 1671-1697.
[11] ZHOU F, DONG D N, LI W W, et al. GAMP: an open-source software of multi-GNSS precise point positioning using undifferenced and uncombined observations[J]. GPS Solutions, 2018, 22(2): 1-10.
[12] WANNINGER L, BEER S. BeiDou satellite-induced code pseudorange variations: diagnosis and therapy[J]. GPS Solutions, 2015, 19(4): 639-648.
[13] WEBER G, MERVART L. The BKG Ntrip client (BNC)[M]. Frankfurt: BKG, 2016.
[14] MONTENBRUCK O, STEIGENBERGER P, HAUSCHILD A. Broadcast versus precise ephemerides: a multi-GNSS perspective[J]. GPS Solutions, 2015, 19(2): 321-333.
[15] KAZMIERSKI K, HADAS T, SO´SNICA K. Weighting of multi-GNSS observations in real-time precise point positioning[J]. Remote Sensing, 2018, 10(1): 1-15.
[16] XIANG Y, GAO Y, LI Y H. Reducing convergence time of precise point positioning with ionospheric constraints and receiver differential code bias modeling[J]. Journal of Geodesy, 2020, 94(1): 1-13.
Real-time precise point positioning method with pseudo-range ionospheric estimation
JIA Hengjie, YANG Fan, YANG Yingyi, CUI Gong
(Shaoguan Power Supply Bureau of Guangdong Power Grid Co. Ltd., Shaoguan, Guangdong 512000, China)
Aiming at the problem of low calculation accuracy for current precise point positioning (PPP) methods, the paper proposed a real-time PPP method of combining the conventional ionospheric-free (IF) code and phase with extra code ionospheric-estimated measurement (P1ION): the ionosphere-free (IF) combination and P1ION were integrated, and comparatively analyzed with the traditional ionosphere-free PPP (IF-PPP) and the uncombined PPP (UC-PPP); then the quality of Centre National d 'Etudes Spatiales (CNES) real-time precise products (CLK93), including orbit, clock corrections and ionospheric products were evaluated by the final products of the International Global Navigation Satellite System Services (IGS). Experimental result showed that the orbit and clock correction accuracy of global positioning system (GPS) and Galileo satellite navigation system (Galileo) would be better than that of global navigation satellite system (GLONASS) and BeiDou navigation satellite system (BDS); and the standard deviation (STD) and root mean square (RMS) evaluated by the real time ionospheric product vertical total electron content (VTEC) of different analysis centers with respect to final global ionosphere map (GIM) products of Ionosphere Associate Analysis Centers (IAACs) could vary from 1.9 to 2.3 total electron content units (TECU) and 1.9 to 3.2 TECU, respectively; meanwhile, compared with IF-PPP and UC-PPP, the RMS of east (E), north (N), and up (U) components of IF-PPP+P1ION with real-time ionospheric constraints would be improved by 14.0%, 3.7% and 11.2%, respectively.
precise point positioning (PPP); ionospheric delay; pseudo-range ionospheric measurement; pseudo-range ionospheric estimation
P228
A
2095-4999(2023)02-0211-07
贾恒杰, 杨帆, 杨英仪, 等. 附有伪距电离层估计的实时精密单点定位方法[J]. 导航定位学报, 2023, 11(2): 211-217.(JIA Hengjie, YANG Fan, YANG Yingyi, et al. Real-time precise point positioning method with pseudo-range ionospheric estimation[J]. Journal of Navigation and Positioning, 2023, 11(2): 211-217.)DOI:10.16547/j.cnki.10-1096.20230225.
2022-06-01
广东电网有限责任公司科技资助项目(030200KK52180046)。
贾恒杰(1987—),男,广东韶关人,硕士研究生,工程师,研究方向为卫星导航在电力领域的应用。
猜你喜欢
空间科学学报(2021年4期)2021-08-30
空间科学学报(2021年2期)2021-07-21
导航定位学报(2018年3期)2018-09-03
测绘科学与工程(2017年3期)2017-08-16
雷达学报(2017年6期)2017-03-26
测绘通报(2016年12期)2017-01-06
载人航天(2016年4期)2016-12-01
水利科技与经济(2016年9期)2016-04-22
导航定位学报(2015年2期)2015-06-05
导航定位学报(2015年2期)2015-06-05
