基于电流谐振跟踪的热泵永磁风机无位置传感器带速启动研究*
2023-04-27 07:48:22耿运全何致远王子辉李剑科
汽车技术 2023年4期
耿运全 何致远 王子辉 李剑科
(1.浙江科技学院,杭州 310023;2.台州市产品质量安全检测研究院,台州 318000)
主题词:热泵永磁风机 无位置传感器带速启动策略 电流抑制控制 准谐振跟踪
1 前言
电动汽车热泵空调系统具有高效节能、结构紧凑和清洁环保等优点,是降低运行能耗、提升续航里程的有效手段[1-2]。热泵空调的压缩机以及通风系统通常采用高功率密度、低噪声的永磁同步电机,并结合无转子位置传感器矢量控制技术,有效解决了传感器安装空间限制和信号传输干扰等问题。在车辆行驶工况下,热泵风机因惯性作用可能做自由旋转运动,采用无位置传感器带速启动控制策略可有效缩短上电启动时间,但在启动瞬间需精确控制冲击电流,以避免发生过流故障。
风机自由惯性运行时永磁电机处于开路发电状态,绕组感生的反电势中包含了带速启动所需的转子速度、位置等关键信息。为此,工业界通常采用电压传感器直接采集的方法[3]获得电机反电动势,此方法简单可靠,但增加了硬件成本及系统复杂度。为省去电压传感器,国内外学者提出短路电流注入法[4-5]和抑制电流法[6-8]。短路电流注入法利用电压零矢量脉冲的电流响应来估算转子位置和速度信息,此方法需考虑短路电流完全释放时间,对控制器计算性能要求较高[5]。抑制电流法则通过设置电流环零状态的方式激活逆变器,结合无位置传感器估测算法获取转子实时位置角度,并恢复矢量控制,实现全速域带速启动[7]。采用抑制电流法实施带速启动,需要在驱动器上电的瞬间抑制冲击电流,并消除电流跟踪控制器的稳态误差。比例积分谐振(Proportional Integral Resonant,PIR)控制环节具有无静差跟踪特定频率信号的特性,可有效提升电流环的动态跟踪性能[9-12]。文献[13]~文献[15]分别在双馈风力发电机组网侧变频器、中频恒压电源逆变器和永磁同步电机驱动控制器中引入带宽及增益可调的PIR控制环节,较好地解决了采样误差造成的信号跟踪问题,实现了对交流电信号的快速响应。
本文针对空调热泵永磁风机系统带速启动中的电流冲击与跟踪静差问题,提出基于PIR控制的分段带速启动策略,通过无位置传感器估测算法修正电流环谐振环节的频率,实现电流自适应跟踪,并通过PIR 控制与传统PI 控制的仿真与试验对比分析,验证所提出的带速启动策略的有效性和可靠性。
2 热泵风机控制系统与带速启动过程
2.1 永磁电机矢量控制与无位置传感器算法
电动汽车热泵风机系统通常采用电流、速度双闭环无位置传感器矢量控制,以达到较高的运行能效。其中,永磁电机数学模型在αβ静止坐标系下可表示为:
式中,iα、iβ分别为电机定子电流在α、β坐标轴上的分量;uα、uβ分别为电机定子电压在α、β坐标轴上的分量;Rs、Ls分别为定子绕组的电阻和电感;p 为微分算子;eα=-ψωrsinθr、eβ=ψωrcosθr分别为电机反电势在α、β坐标轴上的分量;ψ为永磁体磁链;ωr、θr分别为转子转速和位置角。
构建滑模观测器对反电势中的转子转速和位置角进行观测:
求解估测反电势时需要准确获取端电压uα、uβ和定子电流iα、iβ。在电机控制器中,定子电流通常由电流传感器精确采样,而端电压则由电流环经比例积分过程实现跟踪自整定,无需额外的电压传感器。在带速启动的初始瞬间,电机控制器的电流环和速度环均处于零状态,无法获取准确的端电压期望值,若采用随机开环上电方式则可能导致电流过载或转速失控。因此,需引入电流闭环控制策略,以抑制上电过程中的电流冲击。
2.2 分段启动控制过程
在上电起始时刻,电机的转子位置信号和速度信号均未知,为避免随机上电时引发过流和失控,设计“电流抑制跟踪”和“速度同步恢复”两段启动过程,如图1 所示,其中id、iq分别为定子电流在d、q轴上的分量。整体流程如图2 所示:启动过程中,首先给定d、q轴期望电流并接通1 号控制开关,通过d、q轴的“零期望电流跟踪”获得电机的电压估测信号和电流实测信号,进而估测电机转子速度和位置信号;待转子估测信号稳定后,同时接通2号和3号控制开关以切入速度环,恢复双闭环正常运行。系统上电过程中,需合理设计电流环结构并整定控制参数,使启动电流实现快速动态响应和精确稳态跟踪,并优化切换时间点,平顺接入速度环。
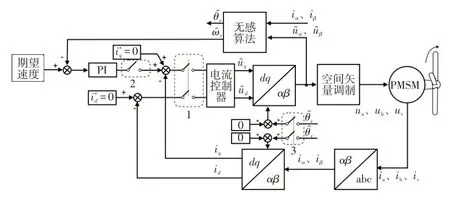
图1 永磁电机无位置传感器带速启动控制系统框图

图2 分段启动控制流程
3 基于PIR控制的电流抑制与跟踪过程
3.1 电流响应分析
为了有效抑制上电启动初始阶段的定子电流冲击,电流环采用PIR 控制。设定d轴、q轴电流环的期望值均为零初始状态,即,估测旋转角度则PI比例积分环节可实现d、q轴电流的快速跟踪抑制,而谐振环节主要调节稳态电流跟踪效果,其控制结构如图3所示。
在跟踪初始阶段,由于强制dq旋转坐标系的相角恒为0,dq坐标系与静止αβ坐标系保持同相位。考虑PI控制下的稳态跟踪性能,电流与反电势的关系由图3可表示为:
式中,Ld为d轴电感;kp、ki分别为PI控制环节中的比例系数和积分系数。
式(3)经过反拉普拉斯变换,可得PI控制器跟踪完成时的定子电流稳态误差为:
式中,Eb为反电动势幅值;Zs、φs分别为定子等效电抗和等效相位:
由式(4)和式(5)可知,在kp、ki不变的情况下,稳态误差电流随转子角频率增大而增大,冲击电流峰值随转子角频率变化的关系如图4所示。若电流环带宽固定,冲击电流峰值也随转子角频率增大而增大;若转子角频率固定,则冲击电流随电流环带宽减小而增大。因此,可通过设计电流环控制器的PI增益或提高带宽来减小带速启动过程中的电流冲击幅值,但调整PI 增益系数对减小稳态误差电流的效果有限。为此,需改进PI 控制器,使带速启动电流控制过程同时满足跟踪精确和快速响应的要求。

图4 冲击电流峰值随角频率变化情况
3.2 谐振环节的电流响应优化设计
考虑谐振控制环节在谐振频率处有高增益,可将谐振频率点设于电流基频处,以改善电流控制器的稳态跟踪性能。PIR控制器开环传递函数可描述为:
式中,kr为谐振系数;ωn、ωb分别为谐振频率和谐振带宽。
ωn和ωb的幅频特性如图5 所示。由图5 对比可知,在谐振环节中,增大谐振系数kr可减小交流量的跟踪误差,增大谐振带宽率可增大交流量的响应范围,但谐振系数或谐振带宽过大会造成谐振点附近频率的增益上升,引起额外的电流谐波和转矩振动。因此,通过合理设计kr与ωb,可优化带速启动过程中对交流电流量的跟踪效果。

图5 PIR谐振环节幅频特性
结合电机传递函数并考虑系统延时环节,可得PIR电流环的开环传递函数为:
式中,Td为系统延时时间。
电流环闭环传递函数特征方程为:
其中:
在不同谐振频率下,闭环传递函数随kr变化的根轨迹如图6所示,由图6可知,主导极点与虚轴交点的临界增益值随谐振频率ωn增大而减小。为满足带速启动工况,选取电机在最大转速下的临界增益为,可得使系统稳定的kr范围为:

图6 kr根轨迹
为达到精确的稳态跟踪效果,PIR 控制器的kr可根据系统性能指标进行设计,如整定为二阶系统的理想阻尼系数ξ=0.6~0.8[16]。
带速启动过程中,定子电流频率跟随电机转速实时变化,从而影响电流谐振环节的控制性能。无位置传感器算法估测得到的转子同步角频率即为电流基频,故可将谐振频率点设定为转子角频率并跟随转速变化,以优化误差信号的动态增益。改进后的准谐振环节传递函数描述为:
在处理器芯片的离散计算中,受脉宽调制死区误差、电流采样误差、电机参数变化等因素影响,无位置传感器估测算法的角度和速度存在波动,其速度波动量为:
式中,Ts为离散系统采样时间;为估测角的波动范围;F为低通滤波器。
为使谐振频率点准确跟随速度的波动,同时尽可能降低对谐振点以外频率的消极增益,设计谐振带宽略大于速度波动范围,有:
4 系统仿真与试验验证
为验证所提出的策略的有效性,在MATLAB/Simulink中搭建如图1所示的永磁电机无位置传感器带速启动控制系统仿真模型,并搭建基于STM32F407控制核心的对拖试验平台,如图7所示。永磁电机及控制参数如表1所示。其中,永磁电机转子位置信息通过增量式编码器获取,电机三相定子电流通过采样电阻获取。

表1 永磁电机参数

图7 电机带速启动试验平台
4.1 稳态跟踪性能仿真分析
在正常运行速度区间,无位置传感器算法的速度估测值波动范围最大为±2.4 rad/s,故依式(13)整定ωb=5.0 rad/s。如图8所示,选择二阶系统最佳阻尼系数ξ=0.707绘制虚轴左侧根轨迹,在该阻尼系数下,kr的取值对电机速度变化不敏感,因此整定控制参数为kp=1、ki=1 600、kr=664。

图8 不同速度下kr根轨迹
在1 000 r/min、2 000 r/min、3 000 r/min、3 500 r/min转速下进行零期望电流闭环启动仿真,对比电流控制器在稳态时的端电压响应,如图9 所示。相比PI 控制,PIR 控制器的q轴跟踪电压的相位和幅值更接近真实值:速度为1 000 r/min 时,PIR 的相位跟踪比PI 超前0.07 ms,约5.83%,电压峰值误差为0.019 V;3 500 r/min时,PIR 的相位跟踪超前0.40 ms,约8.34%,且电压峰值误差为0.530 V。可见,电流环的稳态跟踪误差随电机转速增大而增大,特别是在中高速工况下,谐振环节能显著弥补电流环的动态响应不足,达到良好的跟踪效果。


图9 PIR控制与PI控制电压跟随对比
在稳态跟踪工况下,由于PIR电流环控制器的电压跟踪性能优于PI控制器,使得无位置传感器算法的位置角估算精度提升。算法估测角的误差对比如表2所示。

表2 PIR与PI控制器无位置传感器估算角误差对比
4.2 带速启动过程试验研究
采用图7所示试验平台,对电流抑制跟踪过程和分段启动全过程分别开展试验研究,并通过STM32 的CubeMonitor 上位机工具和通讯串口实时采样运行数据,采样周期Ts=1 ms。
4.2.1 电流环抑制跟踪试验
在上电初始时刻,负载电机以1 500 r/min恒速拖动永磁电机,整定kp=1、ki=1 600、kr=200,冲击电流抑制效果如图10 所示。冲击电流抑制过程从2Ts峰值时刻开始,经3~5 ms后达到稳定后,使能无位置传感器速度估测算法。
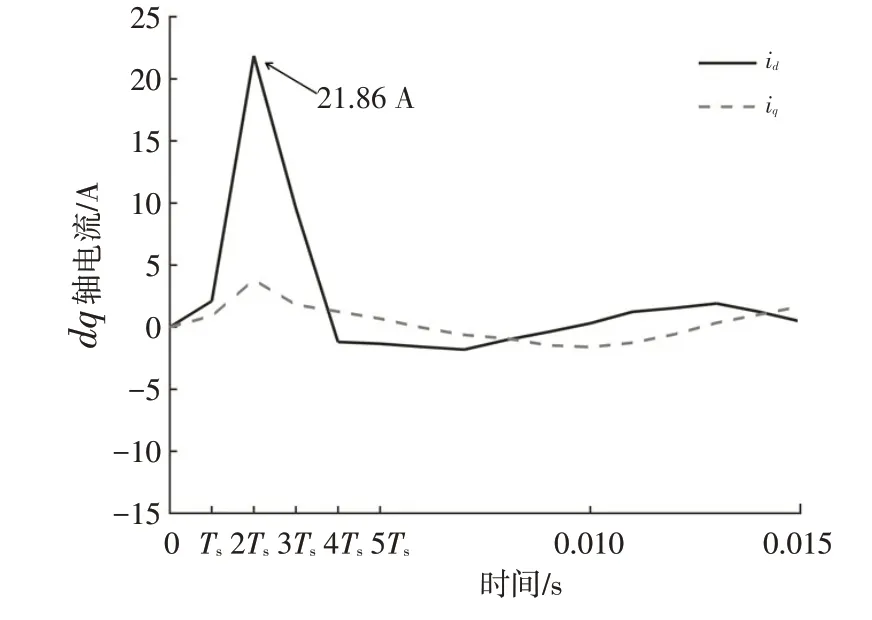
图10 冲击电流响应
以a 相定子电流为例,1 500 r/min 转速下电流响应过程如图11a 所示:t1时刻的冲击电流为21.86 A,t1至t2过程的稳态误差电流为3.14 A,无位置传感器算法速度估算结果稳定后的t2时刻切入准谐振环节;t2时刻后,谐振抑制下的定子电流峰值下降至1.69 A,降低53.8%。1 000 r/min 转速下的电流抑制过程如图11b 所示,可见在不同速度下,该方法均能有效抑制冲击电流并跟踪电流信号,改善电流静差问题。

图11 不同转速下带速启动电流环响应过程
由图12可知,谐振跟踪阶段电流信号逐渐收敛,无位置传感器算法估算精度得到提升,电机在1 000 r/min时角度误差从0.165 rad下降到0.090 rad,在1 500 r/min时角度误差由0.169 rad减小到0.147 rad,试验结果与表2所示仿真结果基本一致。
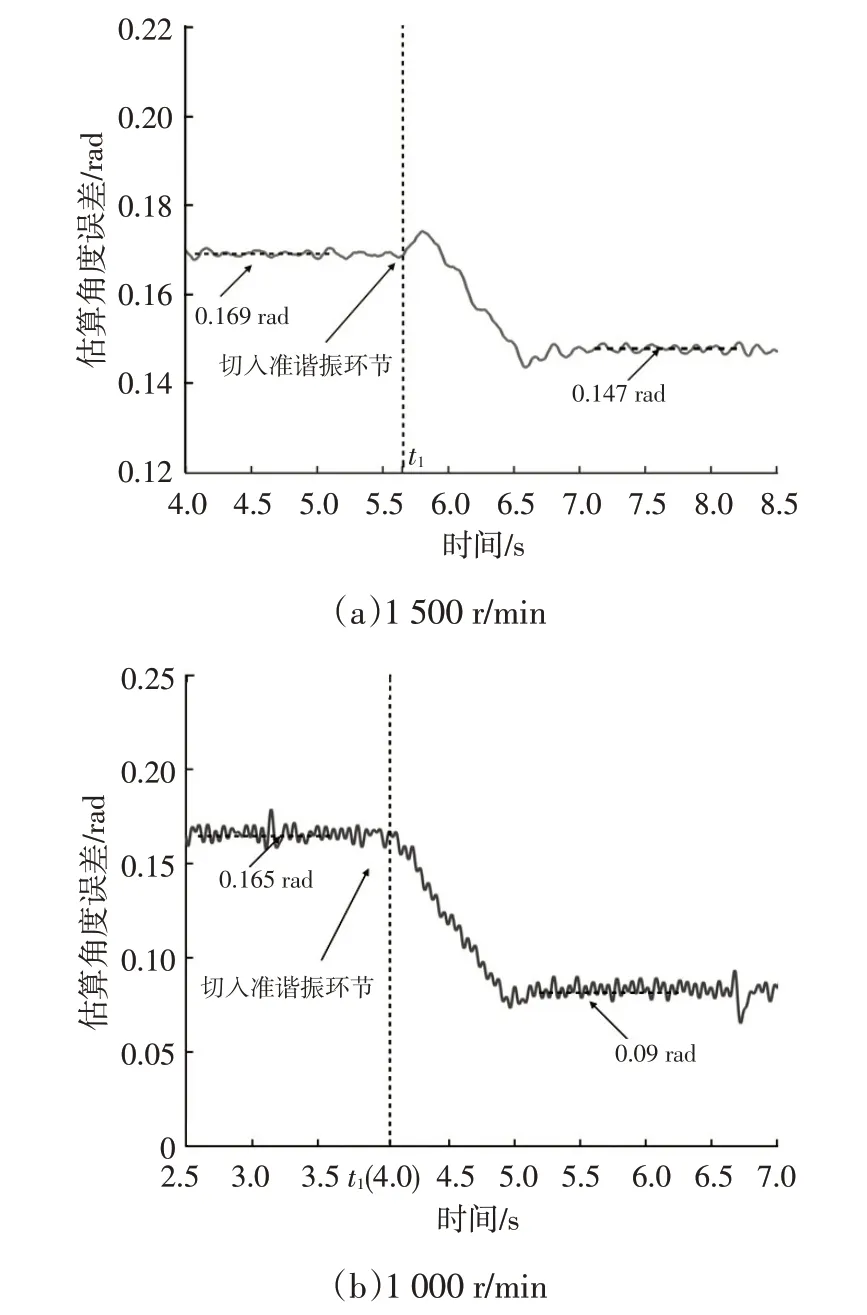
图12 不同转速下带速启动过程无传感估算角度误差
4.2.2 分段带速启动全过程试验
对PI 控制和PIR 控制的带速启动全过程进行对比试验,负载电机保持1 500 r/min,结果如图13 所示。由图13可知:t1时刻起仅采用PI 进行电流抑制跟踪启动,电流环介入后控制器跟踪交流电流信号达到稳定;t2时刻融入PIR准谐振跟踪环节,该过程中无位置传感器算法的位置和速度逐渐收敛并稳定;t3时刻估测的转子角度和速度同步切入速度环,恢复矢量控制状态,此后d、q轴电流保持稳定。采用谐振跟踪环节控制后,电流幅值从t2时刻的3.2 A降至t3时刻的1.7 A,下降约47%。在t3时刻以后的加速阶段,PIR 控制下的速度恢复时间由0.52 s 缩短到0.12 s,电流超调量由4.2 A 减小到3.0 A,动态性能显著提升。由此可知,分段起步控制方法可将电机由带速滑行状态平稳恢复至无位置传感器矢量控制状态。


图13 1 500 r/min转速下分段带速启动控制过程
5 结束语
为满足热泵风机永磁电机控制系统安全带速启动的需求,本文研究了基于谐振跟踪的无位置传感器带速启动策略。针对带速启动过程中采用传统PI控制的交流信号跟踪效果不理想问题,采用PIR自适应跟随控制方法,结合无位置传感器估测算法,有效抑制上电重启瞬间的冲击电流和稳态误差电流,并实现从速度开环到闭环的平顺切换。通过试验研究验证了基于PIR 控制的无位置传感器带速分段启动策略的有效性,结果表明,在带速启动过程中,PIR 控制相比PI 控制的信号幅值误差减小53.8%,并可提高无位置传感估算精度2.87%,使闭环稳速运行更平顺、动态响应性更优。
猜你喜欢
大电机技术(2022年3期)2022-08-06 07:48:24
核科学与工程(2021年4期)2022-01-12 06:30:04
上海大中型电机(2021年2期)2021-07-21 03:01:32
煤气与热力(2021年4期)2021-06-09 06:16:54
防爆电机(2020年6期)2020-12-14 07:16:54
成都信息工程大学学报(2020年5期)2020-07-29 08:50:12
中华戏曲(2020年1期)2020-02-12 02:28:18
西南交通大学学报(2016年3期)2016-06-15 20:29:35
通信电源技术(2016年4期)2016-04-04 02:57:38
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54