基于知识的纯电动汽车两挡变速器挡位决策研究*
2023-04-27 07:48:20翟克宁张静晨刘永刚
汽车技术 2023年4期
翟克宁 张静晨 刘永刚
(1.东风柳州汽车有限公司乘用车技术中心,柳州 545005;2.重庆大学,机械传动国家重点实验室,重庆 400044)
主题词:纯电动汽车 挡位决策 动态规划 长短时记忆网络
1 前言
近年来,为提高纯电动汽车在低速工况下的动力性和高速工况下的经济性,汽车厂商开始关注纯电动汽车两挡变速器技术研究,但是如果换挡规律标定不合理,就会导致两挡变速器的换挡性能不如固定速比减速器[1]。尽管两挡变速器仅有2个挡位,但驾驶意图、驾驶风格和行驶环境都会对最佳换挡规律产生影响,实际换挡规律标定工作复杂且工作量大[2]。
针对车辆建模及换挡规律优化问题,众多学者提出了基于动态规划[3-4]、极小值原理[5-6]等方法优化循环工况下的换挡规律,同时将驾驶意图[7-8]、驾驶风格[9]和道路坡度[10-11]作为优化或修正换挡规律的影响因素,进而提出具有更多参数的换挡规律[12]。但是相较于智能挡位决策技术,制定静态换挡规律并实时应用时,最多只能考虑4个参数[13]。此外,驾驶风格在线识别需要利用一段时间内的行驶数据[14],对运算速度要求较高,而且基于驾驶风格的换挡规律阈值设定强烈依赖专家经验。
因此,本文提出一种基于数据挖掘的静态换挡规律提取方法和基于知识的智能挡位决策方法。以某纯电动汽车两挡变速器为研究对象,首先,建立纯电动汽车动力学模型和挡位优化模型,基于动态规划(Dynamic Programming,DP)算法优化得到最优挡位时序数据,构建初始挡位知识库,基于支持向量机(Support Vector Machine,SVM)算法从挡位知识库中提取静态两参数换挡规律。然后,采集驾驶员手动换挡数据,上传至云端并补充至挡位知识库,建立基于长短时记忆网络(Long Short-Term Memory,LSTM)的挡位决策模型,通过空中下载(Over-The-Air,OTA)技术更新到实车上。最后,通过仿真验证LSTM 经济性挡位决策的准确率和耗电量,并与静态两参数换挡规律和其他智能挡位决策方法进行对比。
2 纯电动汽车动力学建模
搭载两挡变速器的纯电动汽车动力学模型是最佳挡位数据优化的基础,同时作为仿真模型对所提出的静态两参数换挡规律和智能挡位决策方法进行验证。
车辆行驶方程为:
式中,Tm(k)为电机输出扭矩,制动时超出最大电机负扭矩的部分由制动系统提供;i(k)为传动比;v(k)为纵向车速;a(k)为纵向加速度;ηt为传动系统效率;r为车轮半径;m为汽车质量;g为重力加速度;f为滚动阻力系数;CD为空气阻力系数;A为迎风面积;δ为质量换算系数。
驱动电机输出转速表达式为:
驱动电机输出功率表达式为:
式中,ηc(k)为电机发电时电池和电机的总效率;ηd(k)为电机耗电时电池和电机的总效率。
通过试验测得的电池与电机总效率MAP 如图1所示。

图1 电机与电池总效率MAP
电池耗电量表达式为:
式中,E为电池开路电压;R为电池内阻;Qb为电池总容量。
由于仿真时电池荷电状态(State Of Charge,SOC)在60%~70%范围内变化,电池开路电压和内阻几乎不变,可以认为E和R为定值。
模型参数如表1所示。

表1 模型参数
3 最佳挡位数据获取
为了制定最佳两参数换挡规律,利用DP 算法建模优化获取不同工况下的最佳挡位数据。
首先将循环工况按时间离散为N个区段,每段时间间隔为1 s。设定由第k阶段的电池耗电量ΔSsoc(k)和后备功率倒数的等效能耗Et(k)构成系统的状态变量x(k),设定第k阶段的挡位N(k)为系统的控制量u(k),则系统的状态转移方程可以表示为:
后备功率倒数等效能耗表达式为:
式中,Psb(k)为后备功率,为电机能够输出的最大功率与需求功率之差。
ΔSsoc(k)和Et(k)均越小越好,因此对两者进行加权,并对换挡次数进行惩罚,构建目标函数。当0≤k≤N-1时,目标函数表达式为:
式中,S(k)为挡位是否改变的逻辑判断值,挡位改变时取1,挡位不变时取0;λ为经济性加权系数;c为惩罚因子。
该变速器仅有2 个挡位,因此应对控制量进行约束:
在挡位优化过程中,为了保证车辆平稳运行,还应该对电机输出转速和转矩进行约束:
式中,nmmin、nmmax分别为电机转速的最小值和最大值;Tmmin、Tmmax分别为电机当前转速下的最小扭矩和最大扭矩。
优化过程所采用的循环工况设定为新欧洲驾驶循环(New European Driving Cycle,NEDC)工况和全球统一轻型车辆测试循环(Worldwide Light-duty Test Cycle,WLTC)工况的组合工况,然后基于DP算法对优化问题进行求解。DP算法求解过程分为2个步骤:逆向求解,从第N阶段至起始阶段逐个计算对应的控制变量以及目标函数的最优解;正向寻优,根据计算过程中保存的最优解提取最优挡位序列。
将经济性加权系数λ在0~1.0 范围内每间隔0.1 取一个值,基于DP算法进行优化,得到11组优化结果,如表2所示。
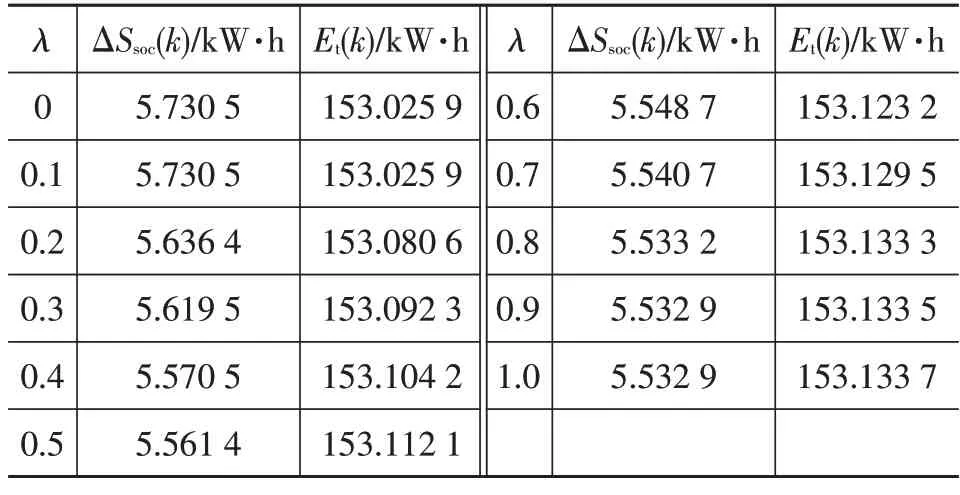
表2 不同经济性加权系数优化结果
其中,当λ为0.9 和1.0 时耗电量相同,均达到了最佳经济性,但是λ=0.9 时后备功率更大,因此设定λ=0.9时为最佳经济性换挡,详细结果如图2所示。

图2 动态规划优化结果仿真曲线
由图2 可以看出,DP 算法优化结果的耗电量为5.532 9 kW·h。该车型原装固定速比减速器在相同循环工况下的耗电量为5.787 6 kW·h,搭载两挡变速器并进行DP算法优化后耗电量降低了4.6%。
利用优化后的挡位数据构建初始挡位知识库,其中部分数据如图3所示。所建立的知识库保存了车速、油门踏板开度、制动主油压、电机转速、SOC、经济性加权系数及对应的挡位信息,为后续基于数据挖掘提取两参数换挡规律和训练基于知识的智能挡位决策模型奠定基础。
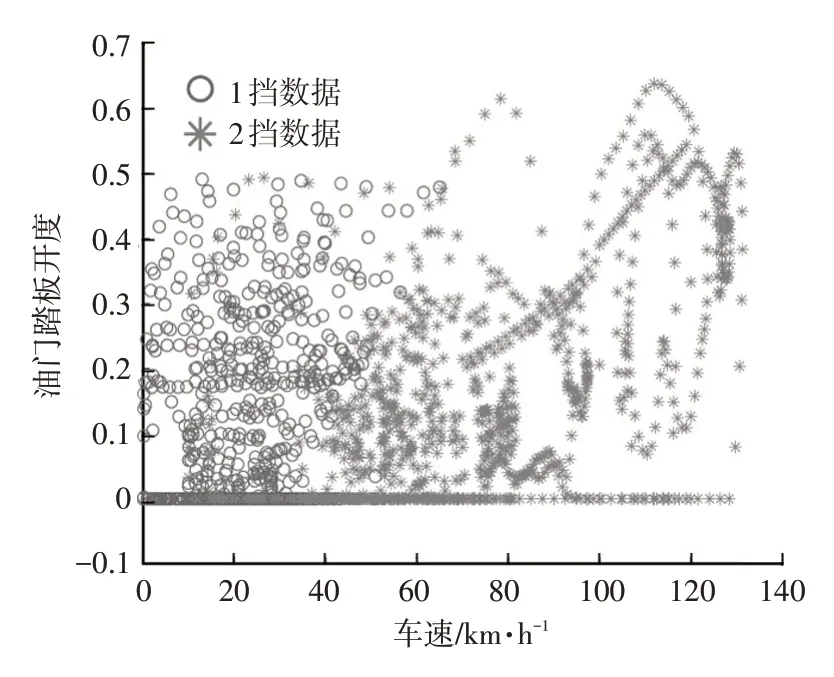
图3 初始挡位知识库部分数据
4 静态两参数换挡规律设定
为了验证基于知识的智能挡位决策方法的优势,利用相同知识库中的数据集通过数据挖掘制定传统静态两参数换挡规律。首先将挡位数据按照不同经济性加权系数划分为多个数据集,然后以油门踏板开度和车速为特征,基于SVM 算法针对每个数据集制定不同的两参数换挡规律。
如图4 所示,当特征为2 维时,SVM 算法可以找到一条最优分割线将数据分为两类,同时使得每一类的支持向量与分割线几何间隔最大。其中,支持向量为平面内每一类距离分割线最近的点,也就是每一类的分类边界,这些点可以用于拟合升挡线和降挡线。

图4 SVM原理示意
需要寻求的最优分割线表达式为:
式中,w为分割线的法向量;b为分割线的偏移量。
第j个样本与分割线之间的函数间隔为:
式中,yj为第j个样本的标签;xj为第j个样本的特征。
样本中支持向量与分割线的几何间隔为:
式中,xsv为支持向量,其与分割线之间的函数间隔为-1时,代表1 挡支持向量,函数间隔为1 时,代表2 挡支持向量。
在1挡支持向量和2挡支持向量之间仍存在难以分类的点,在目标函数中引入惩罚项及松弛变量可以解决此问题。最终,建立求解最优分割线与支持向量的优化问题模型,表达式为:
式中,C为惩罚因子;ξj为松弛变量;n为样本容量。
由式(13)可知,引入惩罚项及松弛变量后可以允许某些点与分割线的函数间隔小于1,即允许某些点存在于支持向量与分割线之间,容许程度由惩罚因子调整。
上述优化问题通过拉格朗日乘子法变换为对偶问题,然后使用序列最小优化求解器进行求解,最终计算可得支持向量。将1 挡数据的部分支持向量插值得到降挡线,将2 挡数据的部分支持向量插值得到升挡线,构成该条件下的静态两参数换挡规律。其中,从经济性加权系数为0.9 对应的DP 优化结果中提取的两参数换挡规律如图5所示。
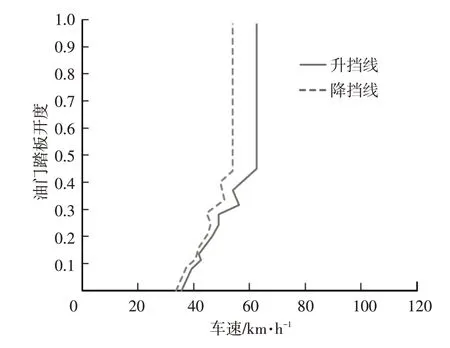
图5 λ=0.9时的两参数换挡规律
以最佳经济性换挡为例,将λ=0.9时基于SVM提取的两参数换挡规律代入仿真模型中,在NEDC 与WLTC组合工况下进行仿真,仿真结果如图6所示。

图6 两参数换挡规律仿真结果
从图6 中可以看出,耗电量为5.696 kW·h,由于驱动电机有很长一段时间工作在7 000 r/min 以上的低效率区间,导致耗电量相较于DP 算法原始优化结果增加了3%。此外,换挡次数明显增多。这种现象产生的原因是静态两参数换挡规律存在升挡线和降挡线,位于升、降挡线之间的点应该选取哪个挡位还取决于上一时刻的车速与油门踏板开度,难以做到最优决策。
5 基于知识的智能挡位决策
通过SVM算法从初始挡位知识库中提取的静态两参数换挡规律难以达到DP 算法优化结果的性能。此外,由于制定换挡规律使用的数据为离线优化数据,不包含驾驶员实际手动换挡的数据,难以反映驾驶员的实际驾驶风格。因此,可以在变速器换挡手柄上增加“强制1挡”和“强制2挡”的选项,采集实际驾驶员选择“强制1挡”或“强制2挡”时的行驶数据,将数据补充至挡位知识库,构建该驾驶员的专属挡位知识库。然后设计基于知识的智能挡位决策方法,通过智能挡位决策技术根据当前行驶信息直接计算出目标挡位。最后通过OTA技术将智能挡位决策模块下载到实车上进行更新。受目前条件限制,本文将DP 算法优化结果假设为驾驶员专属挡位知识库,用于验证基于知识的智能挡位决策方法的有效性。
以当前行驶信息为输入,基于知识计算目标挡位,这属于多维特征分类问题,可通过监督学习算法实现。LSTM 是一种基于深度神经网络的监督学习算法,适用于具有强时序特征的挡位决策过程。LSTM记忆单元包括5个部分:用于保存长期状态的单元状态ct、用于描述当前输入的单元状态,以及遗忘门ft、输入门it和输出门ot。门是一层全连接层,其输入是一个向量,输出是一个0~1范围内的实数向量,在训练期间将更新门的权重向量和偏置项。
选择时间窗为5 s,即LSTM 的特征输入为5 s 内的车速、油门踏板开度、电机转速、制动主油压和SOC,输出为当前时刻的目标挡位。为了验证LSTM 模型在数据覆盖不全面的情况下目标挡位的预测准确率,随机选出85%的样本数据训练LSTM 网络,然后用全部样本数据进行验证。预测准确率如图7所示。
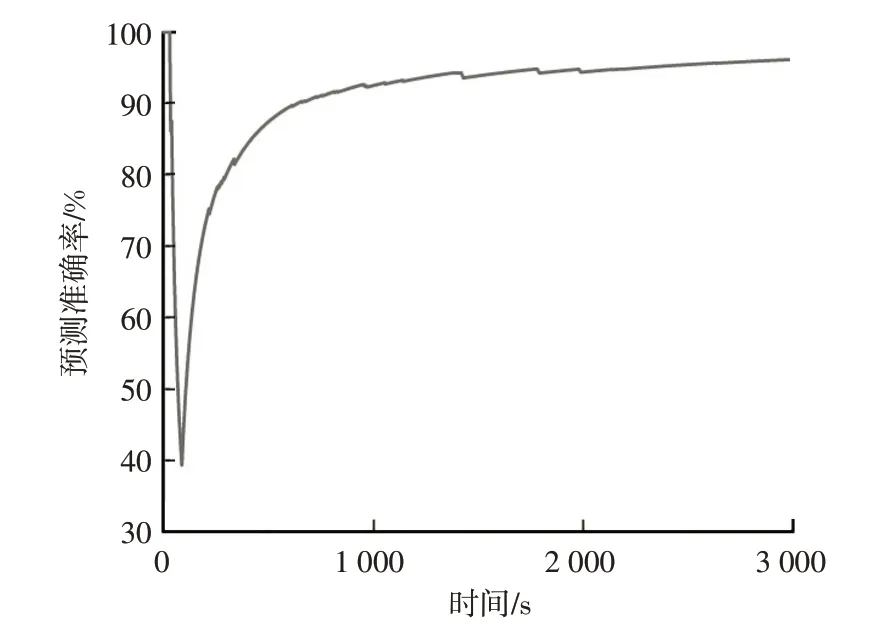
图7 LSTM目标挡位预测准确率
两挡变速器目标挡位预测问题是典型的二分类问题,为了验证LSTM 的优越性,采用常用监督学习算法对相同训练集进行训练,包括逻辑回归(Logistic Regression,LR)、K最邻近(K-Nearest Neighbor,KNN)算法、SVM 和随机森林(Random Forest,RF),然后采用相同测试集验证,结果如表3所示。

表3 不同方法的目标挡位预测准确率 %
从表3 中可以看出,基于LSTM 的挡位决策模型预测准确率最高。由于LSTM的特征输入为时序数据,能够考虑时序特征和历史特征,其余监督学习算法的特征输入均为当前时刻数据,所以LSTM算法的预测准确率更高。
由于基于知识的LSTM 挡位决策可以直接根据车辆状态计算目标挡位,不存在升、降挡线逻辑判断产生的问题,只要保证LSTM 网络的预测准确率,就能获得与训练数据集相同的经济性和动力性。将LSTM 挡位决策模块代入仿真模型中,以最佳经济性换挡为例,对λ=0.9 时在NEDC 与WLTC 组合工况下进行仿真,结果如图8所示。
对比图8与图2可以看出,由于LSTM算法预测准确率较高,挡位决策错误时仅可能导致提前换挡或延迟换挡1~2 s,因此循环工况下的仿真结果与DP算法优化结果非常接近。LSTM 挡位决策的耗电量为5.536 kW·h,相较于DP算法优化结果仅增加了0.056%。
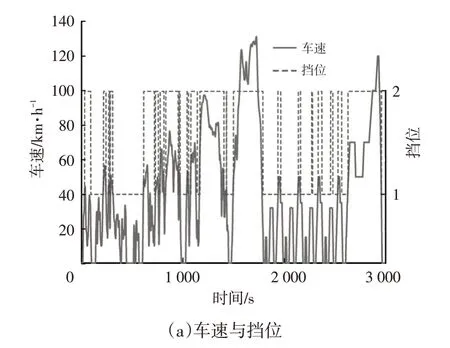
对比图8 与图6 可以看出,在不考虑驾驶风格的情况下,相较于基于SVM提取的两参数换挡规律,智能挡位决策方法的耗电量降低了2.88%,换挡次数也明显减少,市郊工况下驱动电机基本不会工作在7 000 r/min以上的低效率区间。原装固定速比减速器与两挡变速器3种换挡规律的耗电量对比结果如表4所示。

表4 耗电量对比结果 kW·h
综上所述,本文提出的基于知识的LSTM挡位决策模型具有更高的目标挡位预测准确率,且相较于基于SVM的传统静态两参数换挡规律经济性更佳。在未来的产品开发中,通过DP 算法优化训练获得足够多的工况数据集,且包含实际驾驶员手动换挡的数据,即可获得挡位决策精度高且更符合驾驶员风格的LSTM 挡位模型,通过OTA技术在线升级换挡规律,将会显著提升纯电动汽车两挡变速器智能化水平。
6 结束语
本文首先建立了纯电动汽车动力学模型,采用DP算法优化得到最优挡位时序数据,构建挡位知识库,基于SVM提取不同条件下的静态两参数换挡规律。然后建立基于LSTM的挡位决策模型,该模型可通过OTA技术更新到实车上,实现基于知识的智能挡位决策。最后,通过对比仿真验证了LSTM挡位决策的准确率和耗电量。可得到以下结论:
a.基于DP算法优化的纯电动汽车两挡变速器最佳经济性换挡,相较于固定速比减速器耗电量降低约4.6%。
b.相较于基于其他常见监督学习算法的智能挡位决策,LSTM算法具有更高的挡位决策准确率。
c.基于知识的智能挡位决策相较于传统两参数换挡规律在换挡性能方面具有明显提升。
d.基于知识的智能挡位决策可通过OTA 技术在线升级,实现符合驾驶员风格的挡位决策,有效提升纯电动汽车两挡变速器的智能化水平。
猜你喜欢
辽宁丝绸(2022年1期)2022-03-29 00:59:00
日用电器(2021年7期)2021-08-17 02:49:34
煤气与热力(2021年6期)2021-07-28 07:21:18
伴侣(2018年9期)2018-09-19 04:54:34
汽车维修技师(2017年6期)2017-11-18 06:01:49
现代装饰·理论(2016年8期)2016-10-17 08:42:03
新课程(下)(2015年10期)2015-08-15 00:53:42
汽车维护与修理(2015年5期)2015-02-28 12:16:30
化纤与纺织技术(2014年3期)2014-04-02 12:28:07
湖南农业(2013年2期)2013-04-08 11:27:22