航天器地面伴飞系统遥测遥控数据接口设计与实现
2023-04-27 02:12:46史世杰陈立平蒋兴沛吴义忠
空间控制技术与应用 2023年2期
史世杰, 陈立平, 蒋兴沛, 吴义忠
1.华中科技大学, 武汉 430074 2.苏州同元软控信息技术有限公司, 苏州 215000
0 引 言
数字孪生主要由真实空间的实际系统,虚拟空间的虚拟模型,以及虚实系统之间数据信息交互的接口3个部分组成[1].通过数字孪生技术,能够对系统全生命周期进行管理[2],实时映射出真实系统的工作状态.因此对于在轨航天器状态信息缺失、不连续等问题,可基于数字孪生的思想,通过搭建航天器地面伴飞系统,将航天器在轨遥测遥控数据与高精度数字仿真模型进行融合,实现对航天器运行状态的模拟.然而航天器传回地面的是没有处理的二进制原始数据[3],无法直接注入航天器数字模型进行仿真,需要开展航天器地面伴飞系统遥测遥控数据接口设计与实现研究,完成原始二进制数据的解析,将遥测遥控信息准确地注入航天器数字模型,实现地面伴飞系统与在轨航天器的状态同步仿真.
而在航空航天领域,数字孪生技术一直备受关注.2010年美国NASA在文献[4]中提到了“基于仿真的系统工程:NASA数字孪生”这一技术挑战,旨在通过数字孪生技术提升系统寿命和任务成功概率.文献[5]对数字孪生技术在美国空军和NASA下一代飞行器设计中的要求、发展和应用问题进行了探讨,并分析了传统方法的不足.文献[6]指出了美欧军工巨头公司也在积极推进数字孪生技术应用来降低成本,缩短研发周期,并对数字孪生技术在诺格公司F-35战斗机、空客公司A350XWB等型号中的应用效果进行了介绍.在国内,也有不少学者对数字孪生技术展开研究.文献[7]对数字孪生技术在航空航天中的应用展开了介绍,重点关注了机身数字孪生在寿命预测与维护决策方面的应用,并对地面伴飞系统的初步应用框架进行了探讨.而文献[8]则对数字孪生技术在航天制造领域中的应用进行了研究,介绍了数字孪生有关的背景与概念,并总结了未来应用中的一些挑战.
本文以航天器地面伴飞系统为研究对象,对其中涉及的遥测遥控数据处理接口展开了深入研究,对地面伴飞系统中遥测遥控数据的标准化封装、数字模型与遥测遥控数据双向映射技术进行了详细介绍.并完成了遥测遥控数据接口的设计与实现,通过实际工程案例展示了接口的应用效果.
1 遥测遥控数据的标准化封装
空间数据系统咨询委员会(CCSDS),对航天测控和数据传输中的各种通讯协议和数据处理规范进行了研究[9],在数据链路层中,定义了遥测数据链路协议[10]、遥控数据链路协议[11]、高级在轨系统[12]、邻近空间链路协议[13]4种标准.而在应用层中,各种型号航天器的遥测遥控数据种类复杂,格式不统一[14-15],难以与伴飞系统数字仿真模型之间进行有效的融合.因此如何解决航天器遥测遥控数据的异构差异,并将遥测遥控数据和仿真模型、工具进行有效的集成、操作、展示、统一管理,成为了地面数字伴飞系统中迫切需要解决的关键问题.通过对航天器遥测遥控数据的标准化封装,将其与航天器系统数字模型进行有效的集成和融合,为航天器地面数字伴飞系统的构建奠定了真实的数据基础.
遥测遥控数据标准化封装技术的具体工作原理如图1所示.首先通过TCP/IP或UDP协议,将遥测遥控数据传递给相应的数据解析器,数据解析器根据相应的链路协议,完成遥测遥控数据解析,提取其中有用的航天器状态信息,并以相应的数据格式进行缓存,然后通过数据适配器,将指定格式的遥测遥控数据信息进行标准化封装,得到统一格式表达的航天器遥测遥控组件.经过标准化封装后的遥测遥控组件,能够清晰、完整地表达遥测遥控数据中的所有关键信息,并且开放性良好,便于其它软件程序集成,使得航天器地面伴飞系统能够方便地进行统一化的对接和数据处理.
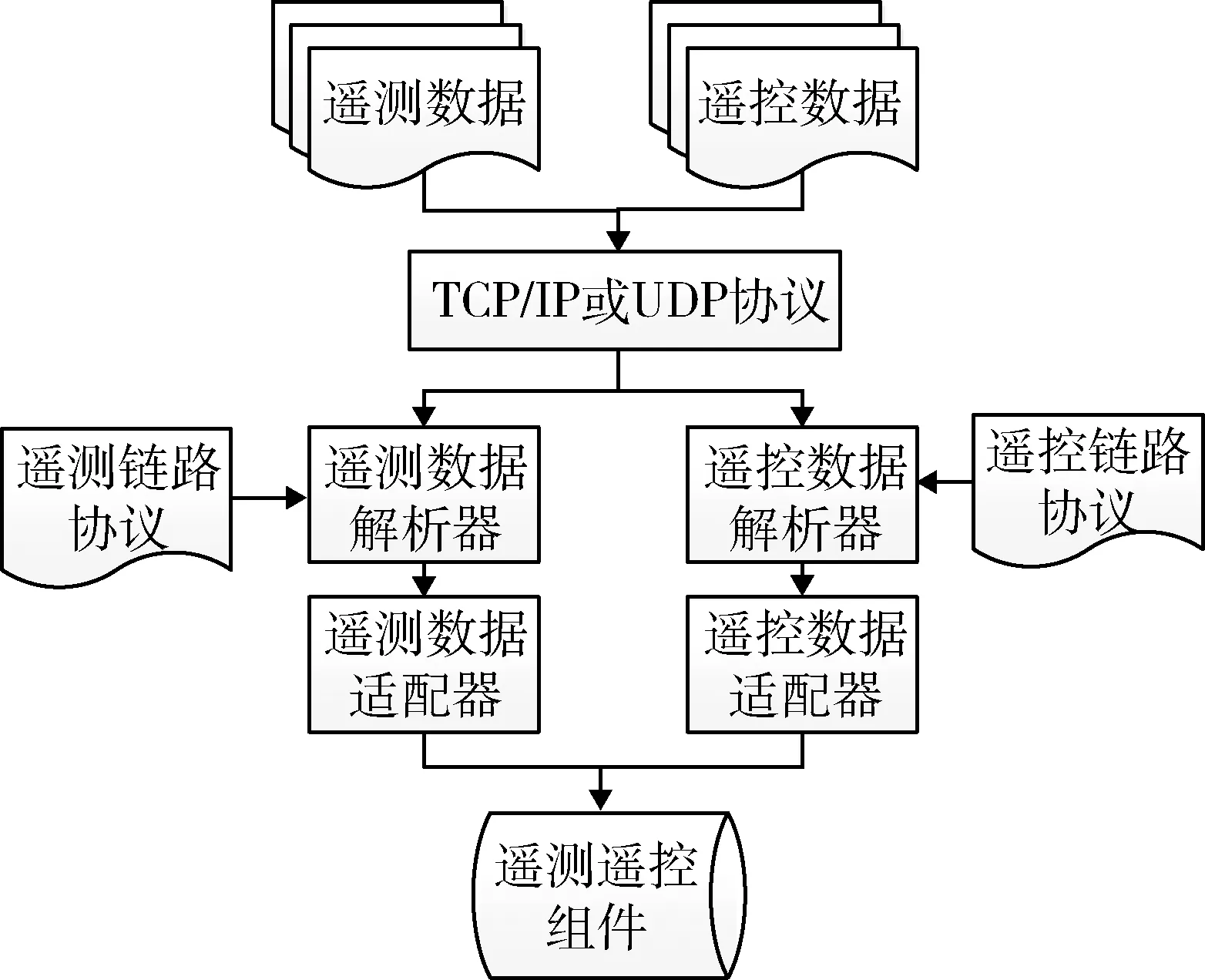
图1 遥测遥控数据标准化封装原理
2 数字模型与遥测遥控数据的双向映射
航天器在其整个任务周期之内会产生大量的遥测遥控数据,这些数据只能反应系统当前的工作状态,无法对未来的工作状态进行预测.而纯粹的系统数字仿真模型则是根据预设的飞行程序进行仿真计算,不能融入空间环境的变化和人为干预等因素.这样造成了2个信息孤岛,使得设计人员无法全面详尽地掌握航天器在真实空间环境下的工作状态和性能指标.
而航天器地面数字伴飞系统能够打通遥测遥控数据和仿真模型之间的联系,建立航天器系统数字模型与遥测遥控数据之间的双向映射,使得遥测遥控数据与数字模型的仿真输入数据建立正向输入映射关系、数字模型的仿真结果数据与遥控数据建立反向反馈映射关系.基于这种数字模型和遥测遥控数据之间的双向映射机制,航天器的数字模型能够有效地集成和融合遥测遥控数据,达到地面数字伴飞的效果.
航天器数字模型与遥测遥控数据的双向映射原理如图2所示.通过第1节中描述的遥测遥控数据标准化封装技术,将遥测遥控数据转换为可识别的设备状态或设备参数(功率、电压、电流等).通过将这些状态信息与数字模型建立映射关联,使得数字模型能够成功地适配对接在线遥测遥控数据,实现数字模型与遥测遥控数据的正向输入映射;而通过数字模型仿真计算,对仿真模型过程或结果数据进行分析处理,能够辅助人工决策,产生新的遥控指令数据.通过将指令数据与实际系统建立关联,从而实现数字模型与遥测遥控数据之间的负向反馈映射.

图2 数字模型与遥测遥控数据的双向映射原理
3 遥测遥控数据接口设计与实现
航天器在轨遥测遥控数据通过测站、指挥中心的层层传输,传递至地面伴飞系统,然而由于地面测站覆盖度的影响,难以保证遥测数据的全面覆盖,因此对于遥测遥控数据缺失的非测控弧段,地面伴飞系统采用预设的模型参数和飞行指令对在轨航天器进行仿真模拟.在离开非测控弧段后,通过对比系统模型仿真计算星时与在轨数据中星时的差别,保证地面伴飞系统与航天器时间上的一致.而对于航天器的测控弧段,地面伴飞系统的主要仿真流程如图3所示,其中遥测遥控数据接口是地面伴飞系统中的关键一环,能够将指挥中心提供的数据解析为航天器在轨状态信息,并将其注入航天器数字仿真模型,为伴飞系统提供数据支撑.当仿真结果偏差较大时,重新完成航天器在轨状态信息的注入,对仿真模型的状态进行修正,确保伴飞系统的计算结果与在轨航天器飞行状态同步.遥测遥控数据接口主要包含了遥测遥控数据对接模块,数据驱动与状态同步模块.本节将针对各个模块的具体设计思路和功能实现展开介绍.
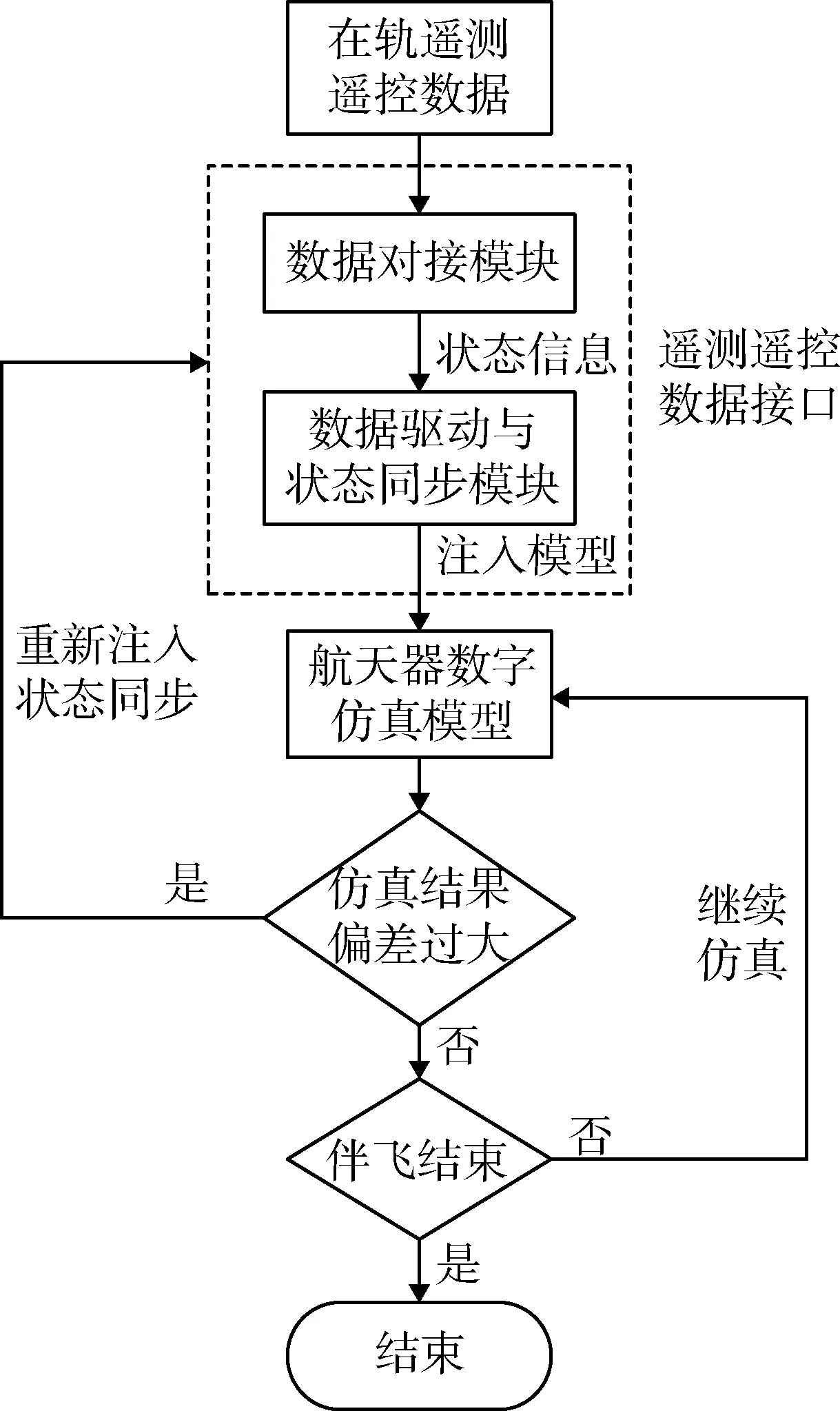
图3 航天器地面伴飞系统仿真流程
3.1 数据对接模块
数字对接模块能够与指挥中心的数据进行对接,为航天器地面伴飞系统实时接受在轨遥测遥控数据,并将其解析处理为可识别的在轨运行状态信息(如设备加电总时间、发动机开关机次数等).数据对接模块的工作流程如图4所示,通过指挥中心提供数据分发服务器,在轨遥测遥控数据传输采用TCP/IP或UDP协议建立连接,并采用订阅模式接收指定数据,得到在轨遥测遥控数据包.然后按照大纲数据协议规范进行拆包、解析,并将其关联到具体设备参数,生成相应的数据缓存和设备的飞行事件序列.

图4 数据对接模块工作流程
接受的在轨数据以多个数据包的形式传输,每个数据包中都包含了数据协议分类、协议版本号、包名称、包原码、参数个数、参数解码、原码等信息.而对于具体型号的航天器,通过导入数据与模型关联配置文件(见图5,xml语言)建立数据与航天器数字仿真模型参数之间的映射关系,配置文件以子系统-设备-参数的层次结构对在轨遥测遥控数据进行描述,包含了数据的名称、代号、数据类型、设备的名称、代号等信息.对接模块可根据相应的协议,配置参数信息同时对多个数据进行接受,实时获取在轨数据加入缓存,并依据数据类型将解析的参数存储在MongoDB数据库中.
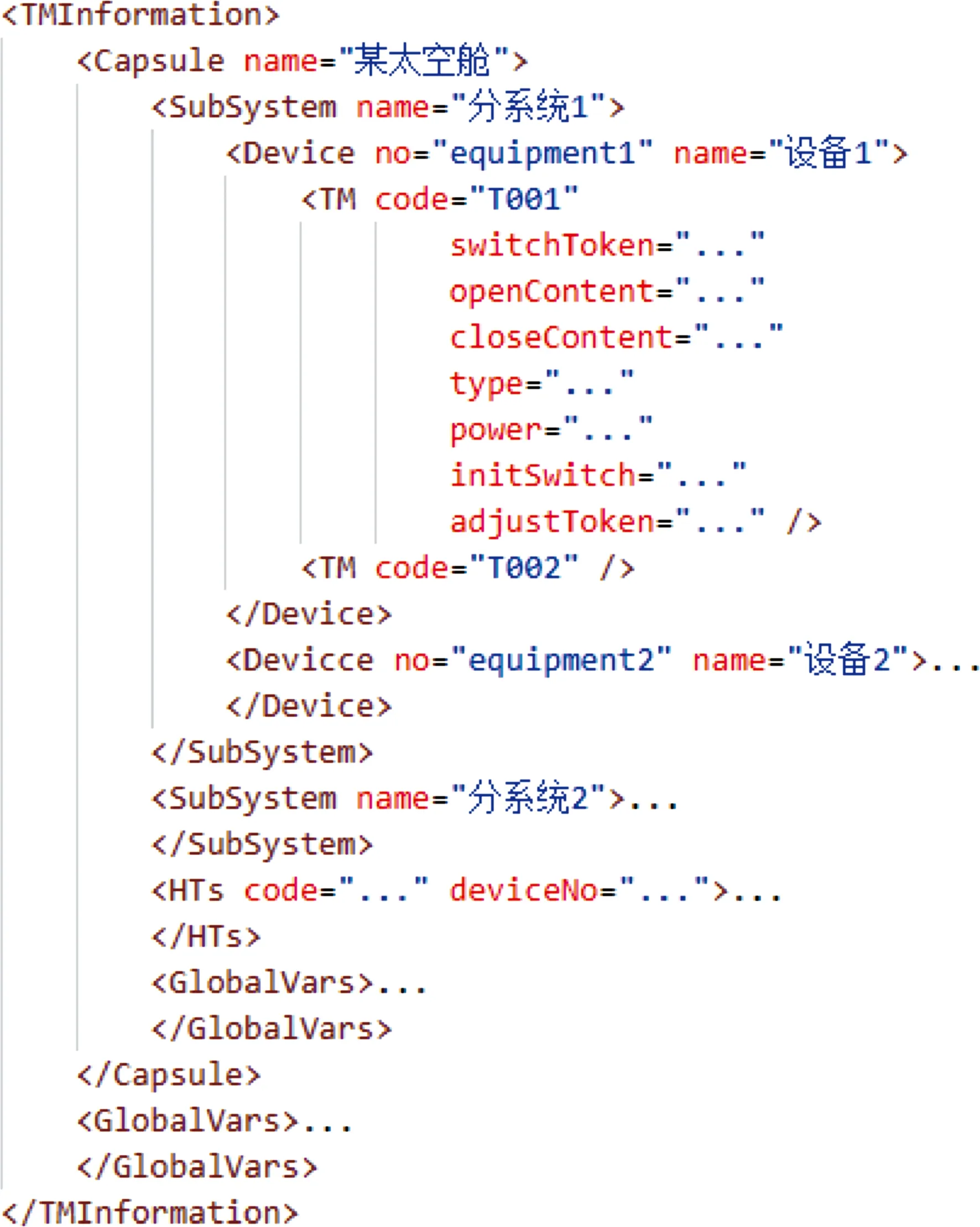
图5 数据与模型关联配置xml文件
3.2 数据驱动与状态同步模块
航天器地面伴飞系统需要将遥测遥控数据解析得到的状态信息注入航天器数字仿真模型中进行实时同步仿真.数据驱动与状态同步模块主要具有数据驱动和状态同步2个功能.在系统模型仿真计算时,通过数据驱动功能,将环境工况和飞行事件等信息注入到航天器仿真模型中,通过实际数据驱动地面伴飞系统运行.而随着模型仿真时误差的积累,在仿真结果偏离航天器真实状态时,通过状态同步功能,将环境工况数据、飞行事件、仿真状态参数等信息注入航天器仿真模型,重新对仿真计算进行初始化后,继续进行仿真求解,实现仿真模型与实际航天器系统的状态同步.数据驱动与状态同步模块的工作流程如图6所示.
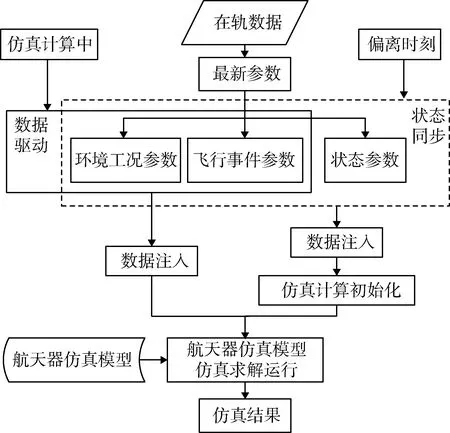
图6 数据驱动与状态同步模块工作流程
而在地面伴飞仿真过程中,可以通过阈值偏差分析、曲线对比分析的方式对系统仿真状态进行评估,将在轨数据信息与仿真结果进行对比,辅助人工决策判断.
1)阈值偏差分析:对于具体航天器的具体参数,依据其设计技术指标,对其正常工作范围进行判断,并计算在轨数据和仿真结果的误差,当其数据偏离设计范围时,对其进行标识警告.例如对于供配电系统其母线电压需要保持稳定,其设计工作范围为29±1 V,系统会依据此范围,对母线电压进行标识警告.
2)曲线对比分析:可对历史仿真数据与在轨数据曲线进行对比,通过曲线之间的相减,曲线的积分微分等方式对仿真结果与实际数据之间的差异进行评估判断.并且可以支持对评估算法的扩充,便于应对更加复杂的分析情况.
4 遥测遥控数据接口应用实例
通过前文的分析,对航天器地面伴飞系统中遥测遥控数据接口进行了实现,并已成功在某型号航天器地面伴飞平台中得到应用.本节主要对所设计的遥测遥控数据接口使用效果进行分析,并简要地介绍了航天器地面伴飞系统中所涉及的数字仿真模型.
4.1 伴飞系统Modelica仿真模型
航天器地面伴飞系统作为在轨航天器的一个地面孪生系统,需要对在轨航天器进行高保真度的建模,得到地面虚拟仿真模型.而遥测遥控数据接口作为真实世界在轨航天器与虚拟环境中仿真模型的信息通道,传递遥测遥控信息,保证状态同步.目前航天器任务、结构复杂,并且涉及多个领域的专业知识[16],可以采用基于Modelica语言的多领域统一建模与仿真技术[17-21],完成航天器仿真模型的实现.本例中,采用Modelica语言对航天器供配电系统中涉及的工作环境、太阳能电池阵、蓄电池、供配电单元、以及各种负载模型进行了实现,搭建了系统级仿真模型(如图7所示),然后通过图5中的xml配置方式,完成在轨数据与仿真模型之间的关联映射,所建立Modelica模型反应了系统的真实拓扑.最后系统的Modelica模型通过MWorks软件求解器快速求解,以满足地面伴飞系统实时同步的仿真需求.

图7 航天器供配电系统Modelica仿真模型
4.2 结果分析
通过航天器地面伴飞系统,对上述案例展开了伴飞仿真.应用结果表明,遥测遥控数据接口能够成功连接在轨数据(如图8所示),实时接受在轨遥测遥控数据包,并将数据包按照大纲规范协议进行拆包、数据拼接、解析处理,为航天器数字仿真模型提供真实的在轨状态信息、环境工况参数、飞行事件参数.部分仿真结果与遥测数据对比情况如图9所示,可见仿真结果与遥测值相差较小.而图10给出了伴飞系统仿真结果中剩余电量,蓄电池组充放电功率仿真曲线,从图中可以看出蓄电池充放电正常,剩余电量充足.所设计的遥测遥控数据接口整体功能正常,数据传输准确,为航天器地面伴飞系统提供了数据基础,具有较好的应用效果.

图8 遥测遥控数据连接

图9 伴飞系统仿真结果与遥测遥控结果对比
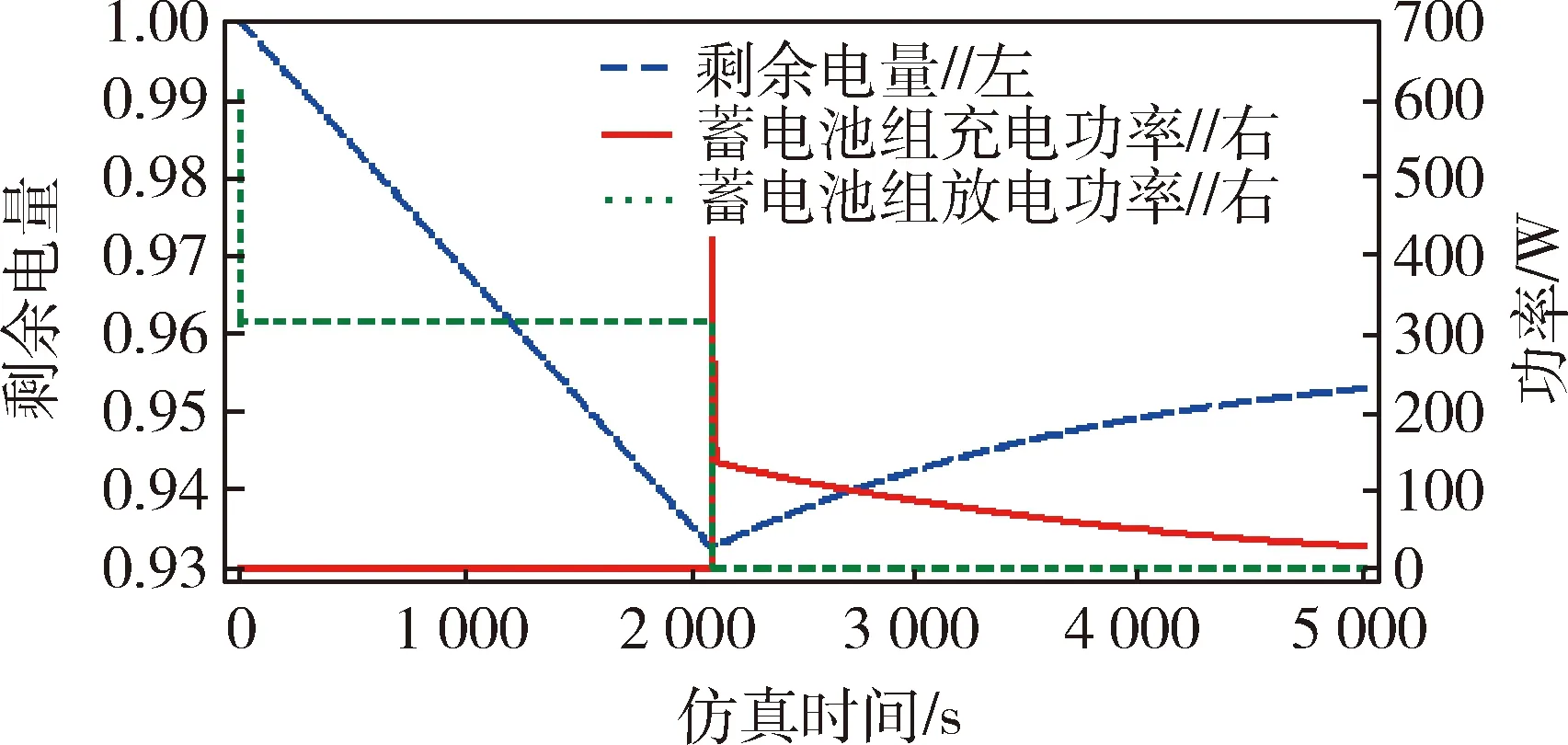
图10 伴飞系统仿真曲线
5 结 论
航天器地面伴飞系统是在轨航天器的地面孪生体,映射了在轨航天器的飞行状态,便于地面监测与对比,能够通过仿真数据对航天器运行状态进行更加全面的评估.本文主要解决了地面伴飞系统中遥测遥控数据接口的设计与实现问题,能够顺利完成原始二进制数据的解析和在轨航天器运行状态的注入功能,保证地面伴飞系统与在轨航天器运行同步.本研究所设计的航天器遥测遥控数据接口,已成功应用于某型号航天器地面数字伴飞系统中,能够满足伴飞系统的实时数据需要,为航天器地面伴飞提供有效的数据支撑.
猜你喜欢
青少年科技博览(中学版)(2023年1期)2023-03-17 00:44:42
口腔医学(2021年10期)2021-12-02 02:07:52
军民两用技术与产品(2021年9期)2021-03-09 05:45:44
电子制作(2019年11期)2019-07-04 00:34:40
语文世界(小学版)(2019年2期)2019-02-24 08:24:34
电子测试(2018年13期)2018-09-26 03:30:00
现代商贸工业(2016年24期)2017-01-13 20:56:40
智富时代(2016年12期)2016-12-01 15:12:21
现代工业经济和信息化(2016年6期)2016-05-17 05:36:13
小天使·一年级语数英综合(2014年7期)2014-06-26 14:45:18