潜艇与UUV 协同解算目标运动要素方法研究
2023-04-24 09:19:16王天忠
数字海洋与水下攻防 2023年2期
王天忠,王 威,江 莲
(中国人民解放军第92337 部队,辽宁 大连 116023)
0 引言
伴随新型无人武器平台的大量应用,有人–无人协同作战已成为未来体系作战的必然趋势[1]。近年来,美、俄等军事强国在有人–无人协同作战方面开展了多项演示验证,并取得了阶段性成果[2-4]。UUV 是当今世界海军国家重点发展的水下作战装备,已经被广泛应用到水下战场。随着人工智能、导航控制、有效载荷等技术的突破性进展,潜艇与UUV 协同作战会成为全新的水下作战样式,必将推动水下战争形态发生革命性变化。
1 协同作战任务
美国智库研究报告《水下战新纪元》指出:水下作战样式向潜艇–无人平台体系化转变,潜艇需要从类似于飞机的前沿战术平台转变为类似于航母的协同平台[5]。潜艇与UUV 协同作战的根本在于减少“有人”增加“无人”,以更经济的成本取得最大的作战效果[6]。
传统水下作战,潜艇作为独立的作战单元,基本自主完成“观察–判断–决策–行动”整个作战过程,作战效能关键取决于平台能力。而潜艇与UUV协同作战,潜艇成为指挥控制平台,组织协调水下作战体系的运行,核心职能在于“判断–决策”2个环节,而“观察”“行动”的职责大多由UUV担负。潜艇与UUV 协同作战时,UUV 可隐蔽航行至潜艇难以抵达的危险海域,在大范围、大深度对目标进行抵近侦察、隐蔽突袭和快速打击,使水下作战行动更加自由,且更加难以防范。
潜艇与UUV 协同作战任务主要可分为以下几种。
1.1 协同探测
潜艇水下作战时通常使用声呐系统对目标进行被动探测,受海洋环境背景噪声、目标辐射噪声水平及自身声呐设备工作能力等因素影响,对目标的探测能力有限,特别是对水下目标的探测更为困难,严重影响交战对抗。而UUV 隐蔽性良好,作战使用方式也非常灵活,可对潜在作战海域进行大范围机动监测。潜艇与UUV 协同探测,不仅实现了潜艇的隐蔽,更为关键的是增强了对战场态势的感知能力,提高了隐蔽探测效率,进而提高潜艇在对抗中的获胜概率。
1.2 协同攻击
潜艇对目标的攻击空间受探测能力的制约,即使武器具备中远距离攻击能力,当探测能力弱时,作战中也无法达成远程攻击。由于潜艇攻击距离较近,攻击后即意味着平台暴露,可能会遭到对手的快速反击,潜艇安全受到严重威胁。潜艇与UUV 协同作战,发挥整体优势可取得先敌攻击的机会。UUV 作为突前攻击兵力,位中远距离对目标实施突袭,潜艇可视攻击效果接续抵近攻击;两者也可协同位目标两侧内外夹击,攻击效能会大幅提高。
1.3 协同防御
潜艇受自身机动规避能力弱、对来袭武器预警能力不足的影响,当发现武器来袭时难以快速形成有效防御;当通过水雷威胁海域时,由于水雷难以被探测到,潜艇面临的威胁也很大。潜艇与UUV协同防御,可提高对来袭武器的威胁告警能力,有利于及时采取相关防御措施,必要时还可以控制UUV 机动航行作诱饵,诱骗来袭武器,从而对潜艇形成保护。面临水雷威胁时,UUV 可以前出充当“猎雷先锋”,为潜艇安全航行开辟通道。
2 协同解算分析
在探测、攻击与防御等作战任务中,往往要求协同作战体系在发现目标后有效评估战场态势,为后续作战行动决策与开展提供依据。其中,兼顾快速性、隐蔽性与安全性开展目标运动要素解算是战场态势评估的重要环节。
在传统的独立作战模式中,潜艇基于声呐设备的目标探测信息,结合自身导航信息,解算目标的航速、航向、方位与距离等运动要素。其解算收敛速度会受到2 方面制约:1)考虑到隐蔽性问题,潜艇会尽量避免采用外露性探测设备同时获取方位与距离,而是主要依靠被动声呐探测的连续方位信息;2)为满足目标可观测性条件,潜艇自身需要完成至少1 次机动过程,才能够使解算结果收敛[7-9]。
在潜艇与UUV 的协同作战中,可以利用UUV使用灵活、行动隐蔽、风险承受能力强、使用成本低等特点。由UUV 作为前置兵力同步侦察,并将目标跟踪探测信息汇总至潜艇完成目标运动要素解算,通过发挥协同优势缩短解算收敛时间,从而提升作战响应速度。
从实现性角度出发,潜艇与UUV 协同解算过程应考虑水声通信的速率与带宽等限制,不宜要求过高的交互频率以及过大的交互数据量。此外,考虑到发信过程中产生的暴露性风险,应当尽量降低潜艇的主动发信次数,以提升有人平台的隐蔽性与安全性。
因此,提出基于目标位置线的协同解算方法,UUV 根据目标探测信息推算目标位置线,并将其参数通过低频次低容量的水声通信上报,由潜艇接收汇总后解算目标运动要素。
3 基于目标位置线的协同解算方法
假设在侦察阶段目标保持匀速直航状态,战场态势如图1 所示。
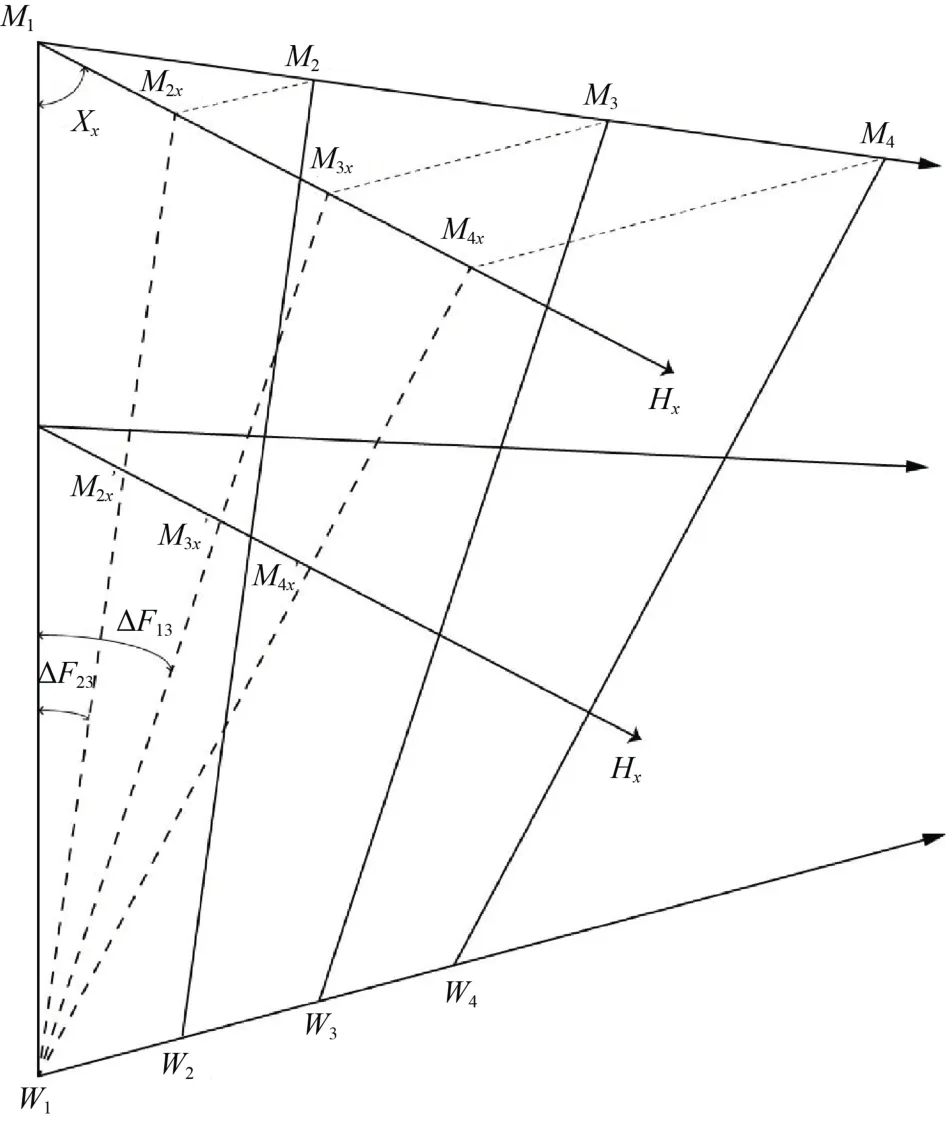
图1 方位示意图Fig. 1 Orientation diagram
UUV 或潜艇以匀速直航状态进行接敌跟踪,在t1、t2、t3时刻分别位于W1、W2、W3点,利用被动声呐探测目标方位为F1、F2、F3。
在目标方位线F1上任意位置假定目标初始点,航向Hm,航速Vm。假设潜艇自身不动,则可以根据相对运动原理做出相对舷角Xx、相对航向Hx与相对航速Vx。
根据几何关系,相对舷角为
相对速度为
式中,D1为直线长度。
按照上述方法,假定探测方位一致但初始距离不同的另一个目标初始点,对应相对舷角,相对航向与相对航速。
在t4时刻位于W4时,可推算目标方位为
将t1-t3时段内方位测量值与测量时间作为已知量,取t为t3到当前时刻的时间间隔,则式(3)可理解为目标方位F(t) 关于时间t的函数,如下式:
式中:
尽管按照不同初距对应不同的运动要素,但是按照各初距点对应的目标航向和航速进行推算所得的各推算目标位置点却在同一条直线上,即目标位置线。取W1为坐标原点建立直角坐标系,目标位置线可表示为
将t1-t3时段内UUV 或潜艇的航速、航向与位置作为已知量,则t时刻位置为
式中:Hm为航向;Vm为航速;为t3时刻位置。
整理式(10)-(12),得到目标位置线表达式为
式中,
在作战任务场景中,结合协同模式及兵力部署方式,可由前置UUV 与后方潜艇同步探测目标,UUV 通过水声通信将解算的目标位置线发送至潜艇,潜艇汇总至少2 条不平行目标位置线,可推算目标轨迹,实现运动要素解算。
4 仿真
设定我方警戒区域为10 000 m×10 000 m 正方形海域,坐标原点为西南角顶点,战场态势如图2所示。
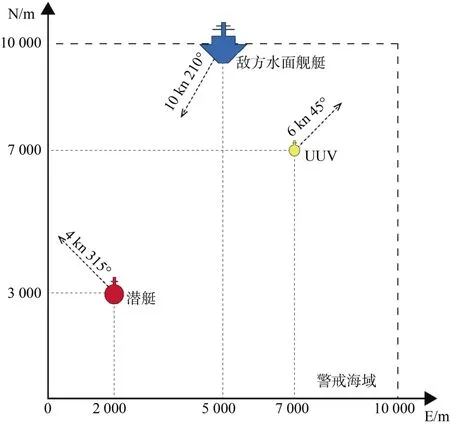
图2 战场态势示意图Fig. 2 Schematic diagram of battlefield situation
敌方水面舰艇以航速10 kn,航向210°,从(5 000,10 000)位置进入警戒区,位置变化如图3 所示。
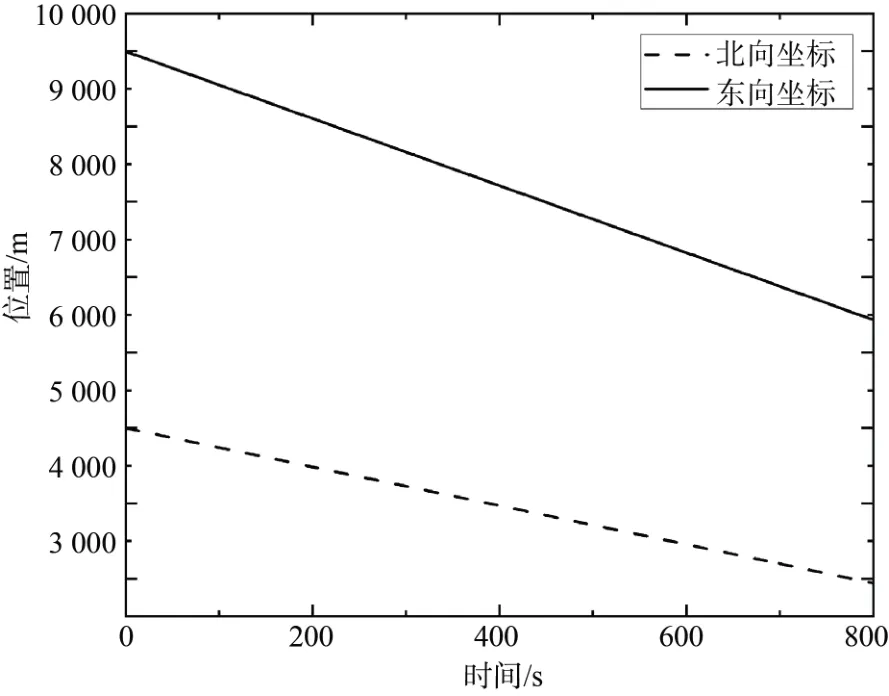
图3 目标位置图Fig. 3 Target location diagram
UUV 以航速6 kn、航向45°,从(7 000,7 000)位置对目标进行探测,潜艇以航速4 kn、航向315°,从(2 000,3 000)位置对目标进行探测,探测目标方位与舷角如图4 所示。
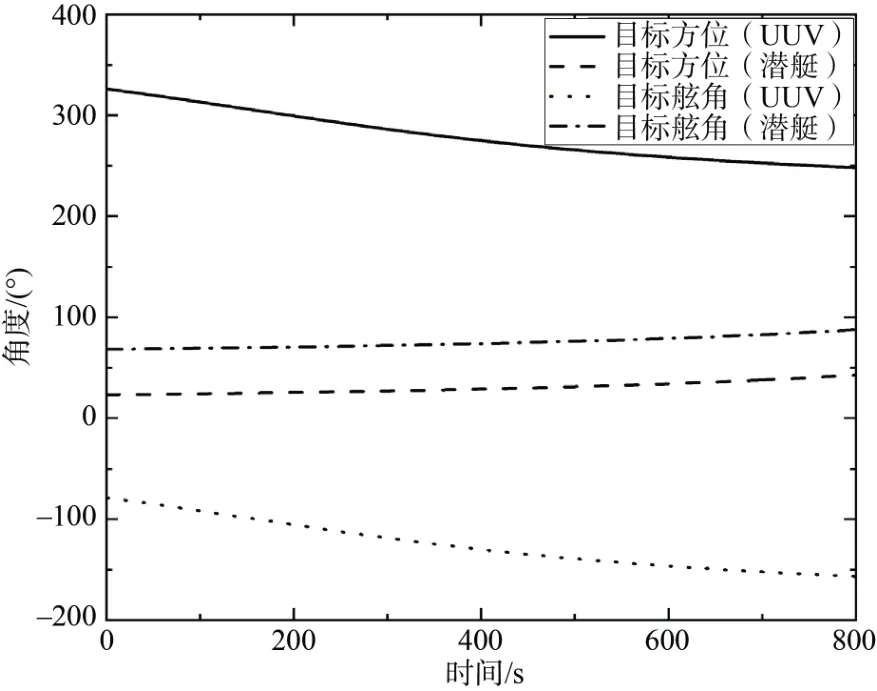
图4 目标方位与舷角图Fig. 4 Target azimuth and port angle diagram
300 s 时刻,UUV 通过水声通信发送推算目标位置线信息,潜艇汇总后推算目标在300 s 后位置如图5 所示。
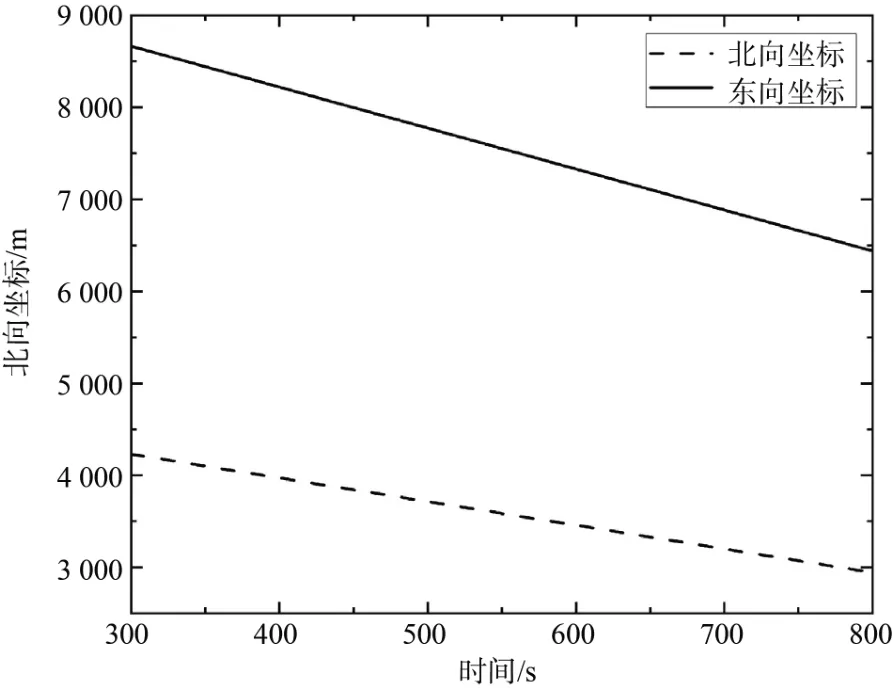
图5 目标位置推算图Fig. 5 Target location calculation chart
其中,UUV 及潜艇推算目标位置线关键参数如表1 所示。
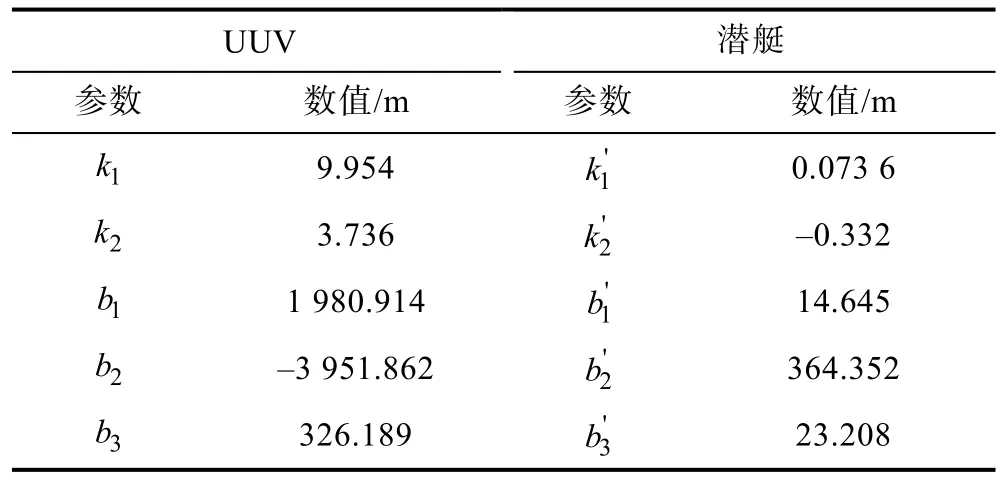
表1 目标位置线关键参数表Table 1 Key parameters of target location line
对比图3 与图5,显然潜艇推算的目标位置信息有效,可用于指导协同作战体系后续的侦查、攻击或防御作战行动。
5 结束语
伴随着反潜探测技术的不断提升,单纯依赖潜艇平台对抗的水下作战模式优势正逐步丧失,UUV 的作战运用能够极大拓展水下战场的覆盖维度,潜艇与UUV 协同作战将为水下作战带来革命性变化。
本文结合协同作战任务中潜艇与UUV 各自优势,围绕“潜艇后方决策,UUV 前方行动”的协同模式,针对战场态势评估对目标运动要素解算的快速性、隐蔽性与安全性要求,提出基于目标轨迹线的运动要素协同解算方法,为后续潜艇与UUV协同作战的战术战法研究提供参考。
猜你喜欢
舰船科学技术(2022年22期)2022-12-13 03:37:24
水上消防(2022年1期)2022-06-16 08:06:56
新世纪智能(高一语文)(2021年3期)2021-07-16 08:30:16
小哥白尼(军事科学)(2021年1期)2021-07-16 07:21:24
小哥白尼(军事科学)(2020年12期)2021-01-18 06:10:12
民用飞机设计与研究(2019年4期)2019-05-21 07:21:26
舰船科学技术(2018年7期)2018-07-25 06:30:18
电子制作(2017年24期)2017-02-02 07:14:16
军事运筹与系统工程(2016年4期)2016-07-10 09:22:26
舰船科学技术(2016年1期)2016-02-27 15:39:23