基于无位置传感器的潜航器集成电机推进系统
2023-04-24 09:19:20苏锦智张继鹏安群涛张伟峰
数字海洋与水下攻防 2023年2期
苏锦智,张继鹏,安群涛,王 辉,张伟峰
(1. 包头长安永磁电机有限公司,内蒙古 包头 014030;2. 哈尔滨工业大学 电气工程及自动化学院,黑龙江 哈尔滨 150001;3. 内蒙古自治区先进永磁电机及其控制技术企业重点实验室,内蒙古 包头 014030)
0 引言
潜航器无轴推进技术取消了传统推进系统的传动轴,将推进电机的转子和与螺旋桨一体化设计构成了集成电机推进系统,具有噪声低、体积小、可靠性高的特点,得到了研究与应用[1-2]。永磁同步电机因效率高、功率密度高、控制特性好,在潜航器推进系统中得到广泛应用[3]。永磁同步电机的高性能运行控制需要检测转子位置信息,然而在集成电机推进系统中,传统推进电机轴系上的位置传感器极大地增加了水下动密封的难度,给系统的可靠性带来风险,为此,无位置传感器控制技术被应用于水下潜航器推进系统[4]。
永磁同步电机无位置传感器技术可以分为2类:1)基于电机凸极效应的高频注入法,受信噪比等因素的影响它仅适合于零速和低速阶段;2)基于电机基波模型的方法,主要采用观测器获取电机反电动势或磁链估计值,进而计算转子位置和速度。由于反电动势和磁链的幅值与电机转速成正比,低速下幅值较小导致观测误差较大,因此该类方法仅适合于中、高速阶段。目前常用的观测器方法有滑模观测器(SMO)[5]、龙贝格观测器[6]、模型参考自适应(MRAS)[7]、扩张状态观测器(ESO)[8]、扩展卡尔曼滤波器(EKF)[9]等。与其他方法相比,滑模观测器具有动态响应快、鲁棒性好等优点,得到了研究者的关注[10]。为实现电机的全速域无位置传感器运行,需要将这类方法相结合。文献[4]研究了高频脉振电压信号注入法和模型参考自适应法相结合的无位置传感器复合检测方法,实现了潜航器推进电机的全速域运行。文献[11]研究了将高频注入与观测器相结合的加权切换策略,减小了切换时的力矩扰动。文献[12]将恒流频比控制(IF)起动与滑模观测器结合,通过设计过渡状态实现了2 种控制策略的平滑切换。
IF 控制是永磁同步电机无位置控制中常用的起动方式,它通过恒电流频率频比控制拖动电机运行到一定转速,从而开启观测器算法并过渡到闭环控制的无位置模式。为提升IF 到SMO 的切换速度,减小切换扰动并提高切换的可靠性。本文将IF 控制构建的虚拟dq坐标系与SMO 观测的dq坐标系相结合,通过dq轴电流的平滑过渡,实现IF 和SMO 之间的无扰切换。将该策略应用于一台潜航器集成电机推进系统中,实现了电机转速良好的动态响应。
1 永磁同步电机的矢量控制
1.1 数学模型
永磁同步电机的电压、电流、反电动势等变量在abc自然坐标系中为交流量,不利于实现高性能控制,通常结合坐标变换思想,建立永磁同步电机在同步旋转转子dq坐标系下的数学模型。在dq坐标系中,各变量变换为直流量,获取类似于直流电机的控制性能。永磁同步电机在dq坐标下的数学模型描述为
式中:ud、uq和id、iq分别为d、q轴电压和电流;R为绕组相电阻;Ld、Lq分别为d、q轴电感;ω为转子电角频率;ψf为永磁磁链;Te为电磁转矩;np为电机极对数。
1.2 矢量控制系统
对于交、直轴电感相等的表贴式永磁同步电机,电磁转矩大小与q轴电流成正比,且d轴电流为0 时可以实现最大转矩电流比控制。采用id=0的永磁同步电机矢量控制系统如图1 所示,它借助坐标变换将检测的绕组电流变换到同步旋转的dq坐标系中,在dq坐标系下分别对d、q轴电流分量进行调节,由于d、q轴的电流为直流量可采用PI调节器实现其无静差控制。与基于机械转子位置传感器的矢量控制不同的是,这里电机转子的位置和速度信息通过SMO 和反正切计算构成的位置和速度估算单元获取,从而取代了传统通过位置传感器检测的方案。SMO 建立在两相静止的αβ坐标系下,根据电机的α、β轴电压和电流观测得到电机的反电动势估计值eˆα和eˆβ,将其送入到反正切计算单元得到位置估算值θˆ 和速度估算值ωˆ,用于矢量解耦和闭环反馈。
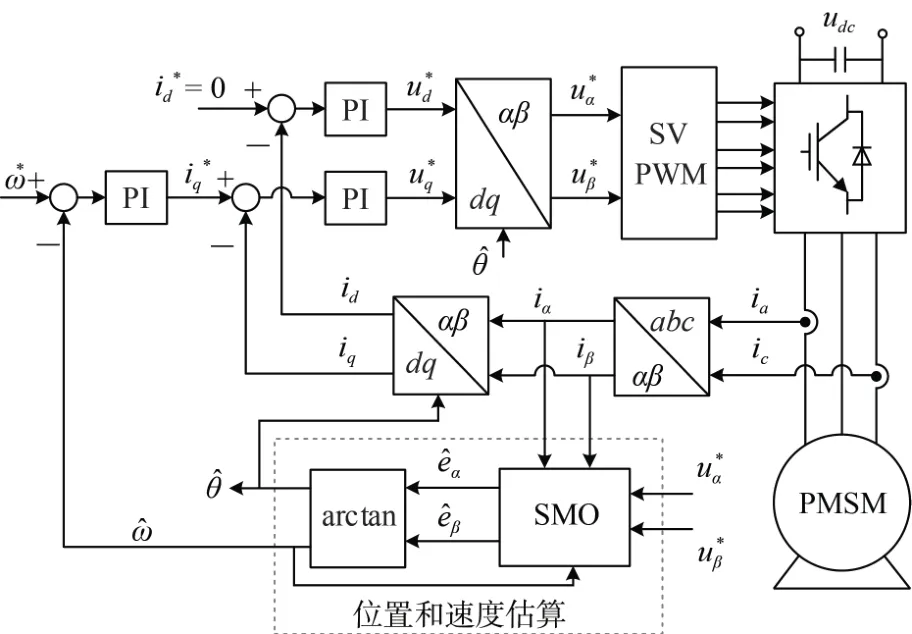
图1 永磁同步电机无位置传感器矢量控制系统Fig. 1 Sensorless vector control of PMSM
在无位置传感器控制系统中,转子位置和速度获取的响应和精度直接影响到电机的性能甚至稳定性,且在电机运行的全速范围内,电机从零速起动,需要结合低速运行的IF 策略,并在转速到达一定值后切换至SMO 模式。同样地,当电机由高速减速到低速运行或停机时,则需要由SMO 模式切换至IF 模式。
2 基于滑模观测器的位置和速度估算
2.1 滑模观测器
根据永磁同步电机的数学模型可以构建αβ坐标系下的状态方程为
式中:eα、eβ、iα、iβ、uα、uβ分别为电机α、β轴的反电动势、电流和电压;L为绕组电感,对于隐极电机有Ld=Lq=L。这里的反电动势为转速ω和位置θ的函数,即
根据式(2)可以构建电流状态观测模型为
式中:“⋀”表示变量的估算值;zα和zβ为滑模切换函数,通常采用如下符号函数:
式中:sgn()表示符号函数;k为增益,为保证观测器稳定,取分别为α、β轴的电流误差。将式(4)代入到式(2)中,得到SMO 的状态误差方程为
在控制量zα和zβ的调节下系统收敛,上式的α、β轴电流误差趋于0,这样电机的反电势可由控制量zα、zβ进行低通滤波后得到,即滑模观测器估算αβ轴反电势为
式中:ωc为低通滤波器的截至频率,滤波后的反电势包含电机的转速与位置信息,可以按如下公式进行求取:
滑模观测器的结构框图如图2 所示。
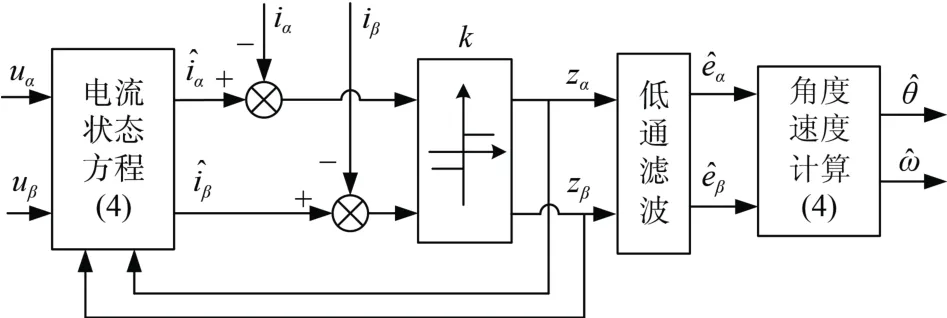
图2 滑模观测器结构框图Fig. 2 Diagram of the SMO
2.2 起动与切换策略
电机起动时转速和反电动势均为0,无法通过观测器获取转子位置,可以通过恒流频比的IF 控制拖动电机起动。IF 控制下,电机转子角度由控制器给定,且频率逐步提升。在电流iq*的拖动下,电机逐步旋转起来,给定坐标系d*q*将超前于实际坐标系dq一个负载角Δθ,如图3 所示,电机的力矩为
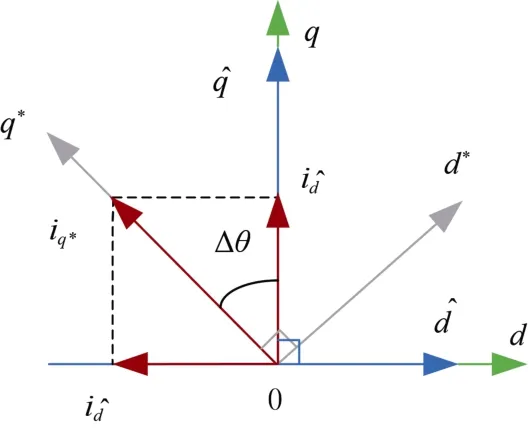
图3 IF 坐标系与观测坐标系之间的关系Fig. 3 Relationship between IF coordinate system and observing coordinate system
为实现永磁同步电机全速阈范围内的无位置传感器控制,需要实现IF 控制与SMO 双闭环控制之间切换。在状态切换过程中,电机可能会切换策略不当、切换过程中负载扰动等因素导致电机失步。常见的加权函数状态切换法能改善切换时的转矩和转速扰动,但对负载的适应性较差。基于功角自平衡原理逐步减小电流幅值的切换策略对负载的适应性较好,但快速性较差且容易因为负载扰动导致电机失步。
下面介绍在双dq坐标系实现的状态切换策略。电机起动到一定转速后,SMO 可以准确估算出转子的位置,这样SMO 估算坐标系与实际坐标系dq重合。在IF 控制下,由于d*q*坐标系与dq坐标系之间存在角度差Δθ,由IF 控制直接切换到转速闭环模式时,将产生较大的扰动且容易出现失步。为提高切换的稳定性、加快响应,d*q*的电流指令赋值给dˆqˆ 坐标系中,使切换前后电流矢量的大小和方向均保持不变,即
3 实验结果
设计1 kW 集成电机推进系统,并对本文所采用的无位置控制算法和切换策略进行验证。电机额定转速为1 200 r/min,额定转矩为8 N·m,系统供电电压为270 V。控制器采用TMS320F28335 作为主控芯片,逆变器选用集成功率模块(IPM),开关频率为10 kHz。
电机轴上分别施加5 N·m 和8 N·m 负载力矩,采用传统减小电流矢量幅值切换策略的位置波形分别如图4 和图5 所示。在5 N·m 负载力矩下电机由IF 切换至SMO 过程中,转速出现大幅跌落后能够逐步稳定到SMO 模式运行,并且在多次测试中偶尔会出现切换失败导致电机失步现象。在8 N·m 负载力矩下,IF 至SMO 切换过程中电机频繁出现失步停机,并且多次实验表明,电机所带负载越大失步的概率越高。上述实验表明:IF 与SMO 之间切换过程中,切换策略的选取影响到电机的带载能力,决定了电机对负载扰动的抵抗性能。传统通过逐步减小电流使负载角趋于零时进行切换的策略存在易受负载扰动影响,切换时间较长的问题。
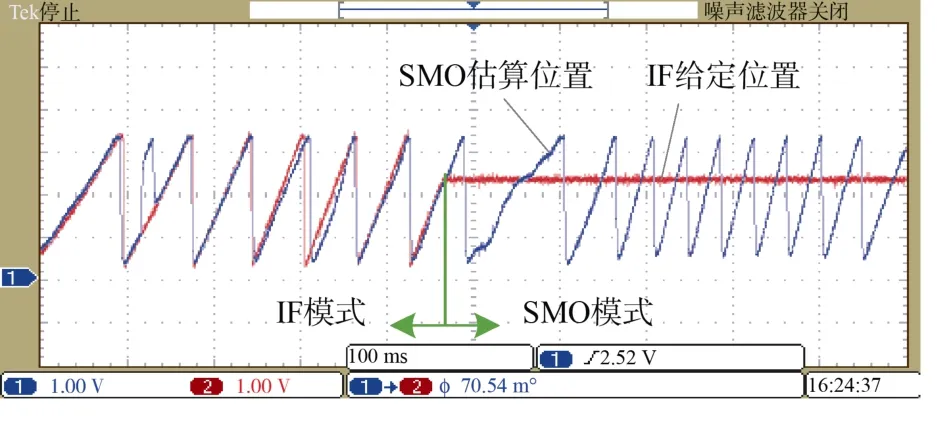
图4 切换过程中的转速扰动Fig. 4 Speed disturbance when switching from IF to SMO
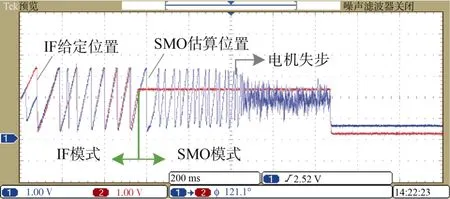
图5 切换过程中的失步Fig. 5 The motor is out of step when switching from IF to SMO
图6 为采用本文所述的双dq坐标系切换策略的实验结果,电机带额定的8 N·m 负载起动,由IF 至SMO 模式可以平滑切换,切换前后转速平稳无扰动,并且多次测试中电机均能快速平滑地起动和稳定运行。对集成电机推进系统进行水下起动和正反转测试,测试结果表明:采用本文所设计的算法电机表现出良好的动态特性和稳定性,满足潜航器对集成电机推进系统的要求。
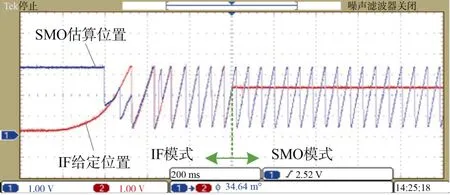
图6 双dq 坐标系下的平滑切换Fig. 6 Smooth switching under the double dq frames
基于该算法开发的集成推进电机系统已应用于潜航器中,经过4 年左右的充分验证,表明了该算法可靠性高、性能稳定。
4 结束语
采用无位置传感器控制永磁同步电机的潜航器集成电机推进系统具有体积小、效率高、可靠性高等优点。本文设计了基于滑模观测器的永磁同步电机无位置控制系统,通过对电机起动过程的研究,低速段采用IF 控制,高速段为SMO 无位置控制,采用双dq坐标系的切换策略实现了IF 控制和SMO 控制的无扰切换,提升了系统运行的稳定性和快速性。测试结果验证了该系统具有良好的综合性能,能够满足潜航器垂推系统的需求。
猜你喜欢
防爆电机(2020年6期)2020-12-14 07:16:54
郑州大学学报(工学版)(2020年2期)2020-06-16 12:43:14
汽车电器(2019年2期)2019-03-22 03:35:16
光学精密工程(2016年3期)2016-11-07 09:03:49
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
电测与仪表(2015年19期)2015-04-09 11:32:56
大电机技术(2015年5期)2015-02-27 08:22:28
电测与仪表(2014年11期)2014-04-04 09:21:36
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54