水下无人集群协同态势感知技术要点初探
2023-04-24 09:19:10闫仲秋黄昱申柳文明李亚哲
数字海洋与水下攻防 2023年2期
闫仲秋,尤 岳,陈 科,黄昱申,柳文明,李亚哲
(1. 中国船舶集团有限公司第七一六研究所,江苏 连云港 222061;2. 海军研究院,北京 100161;3. 中国人民解放军91999 部队,北京 100038)
0 引言
无人系统是影响未来战争制胜的颠覆性技术,集群化作战是无人系统的重要发展方向。随着水下平台、探测、通信、导航、动力以及人工智能技术的快速发展,传统的水下无人平台独立作战、同类平台简单协同的传统应用方式,已难以满足未来水下攻防作战的需要。急需开展水下无人集群作战的作战概念、作战理论研究,融合应用不同类型水下无人平台,构建具备自组织、自决策能力的自主协同作战框架,形成水下无人集群作战探测优势、决策优势、打击优势,提升水下无人集群作战能力。
1 使命任务引出的需求
美海军正在构建一支新型的水下无人作战部队,各类水下无人作战平台计划在2025 年达到2 000 套,届时水下作战任务将更多由无人作战系统承担。水下无人集群由通信中继型无人潜航器、攻击型无人潜航器、侦察型无人潜航器、浮/潜标、水下固定/移动式传感器网络、水下滑翔机、预置武器等组成,集群的主体是无人潜航器,集群的典型作战样式主要包括协同感知行动、协同干扰行动、协同诱骗行动、协同伏击行动、协同水面行动、协同空海行动和集群对抗行动等[1]。

图1 美海军无人潜航器及无人艇的布局图Fig. 1 U.S. Navy UUVs and USVs
分布式侦察与探测系统(CADRE)是协调水下无人航行器的异构集合的框架,该项目最初用于自主执行海底水雷对抗的任务,CADRE 系统由3 类执行不同任务的UUV 组成,包括通信导航任务、搜索分类任务、识别水雷任务,该3 类UUV通过不同的组合和配置还能够执行海军需要的多种任务[2]。
该系统旨在解决美国海军UUV 总体规划中提出的海底搜索和调查以及通信与导航救援功能,其关键属性是可扩展性和模块化。CADRE 系统依靠一个自主水下航行器网络和水面无人航行器保持高精度导航和定位,多模式通信架构在CADRE 系统中起着至关重要的作用,允许系统中的UUV 彼此之间以及与各种支持平台保持联系[2]。

图2 构成CADRE 系统的3 类UUVFig. 2 Three types of UUVs in CADRE

图3 CADRE 系统概念图Fig. 3 Concept of CADRE
自主水下航行器协同感知控制项目(CO3 AUV)是一个欧盟委员资助的多国合作项目,该项目自2009 年开始并持续了3 年时间,期间开展了大量的演示验证工作,其目标是开发、实施和测试用于多UUV 协同控制的高级认知系统,重点投资了3D 感知与绘图、协同态势感知、导航控制与行为控制等方面,这些方面都主要聚焦于无人集群在水下通信所面临的挑战[3]。
近年来,国内也致力于水下无人平台的发展,水下无人平台的集群化作战、有人无人协同作战成为未来提升水下攻防作战能力的有效途径。水下无人集群通过标准化集成化设计,在对水下各类复杂作战需求进行功能分解和节点分类基础上,将广域分布的各种作战要素无缝衔接和智能聚合,实现了作战模式由传统的多功能集中式大型单一平台向功能分布式小型多平台的转变[4],其理论思想为依靠数量优势转化为质量优势,将个体的性能劣势转化为集群的整体优势。
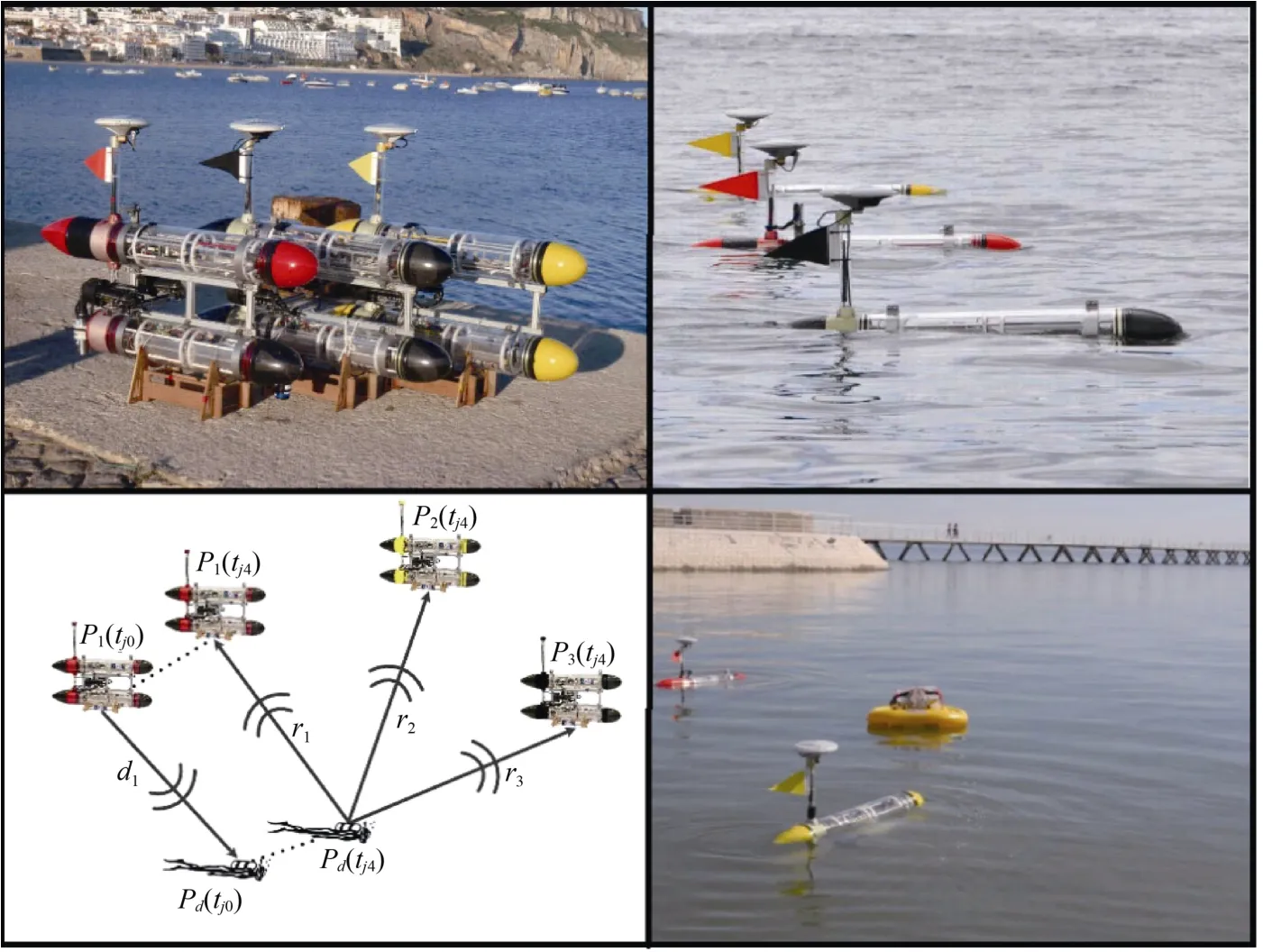
图4 CO3 AUV 项目演示验证示意图Fig. 4 Demonstration of CO3 AUVs
为了保障水下无人平台集群的作战效能,需要具备获取实时、准确、统一战场态势的能力。协同决策、协同打击是水下无人集群优势的核心,集群协同态势感知一致性是实现群体一致性决策和火力聚能打击的前提。水下无人集群获取的态势信息与战场真实态势信息的一致性、集群中个体对任务态势理解的一致性、集群预测的态势与真实态势的一致性等将直接影响水下无人集群的协同决策与协同打击预期效果[5]。实现无人集群协同态势感知需要进行协同目标探测、目标识别和融合估计、协同态势理解与共享,以获取完整、清晰、准确的信息。
2 水下无人集群态势生成问题分析
由于海洋环境的特殊性、复杂性以及未知时变,水下战场具有显著的弱联通、贫信息等特征,加之战场环境的对抗性和动态性,水下无人集群中个体获取的态势信息存在不确定、不完全、不可靠等特性,集群中的个体对态势的认知存在差异,甚至谬误,进而导致水下无人集群的态势要素表示困难、目标综合识别困难、态势推理精确度低以及群体态势认知[6]困难等问题。
2.1 态势要素表示困难
水下无人集群的态势要素通常包括敌我实时数据、历史积累数据、海洋环境数据等多类异构数据,用于态势生成的信息融合、事件监测、意图识别、态势预测、威胁评估等实体描述及领域规则,具有动态变化特性和平台间可交互性[7]。多个平台的作战逻辑和信息描述方式存在差异,给态势知识的形式化或参数化表征带来极大困难,且因水下战场规则和方式的快速变化,态势要素表示需要一种可变化和可拓展的结构。
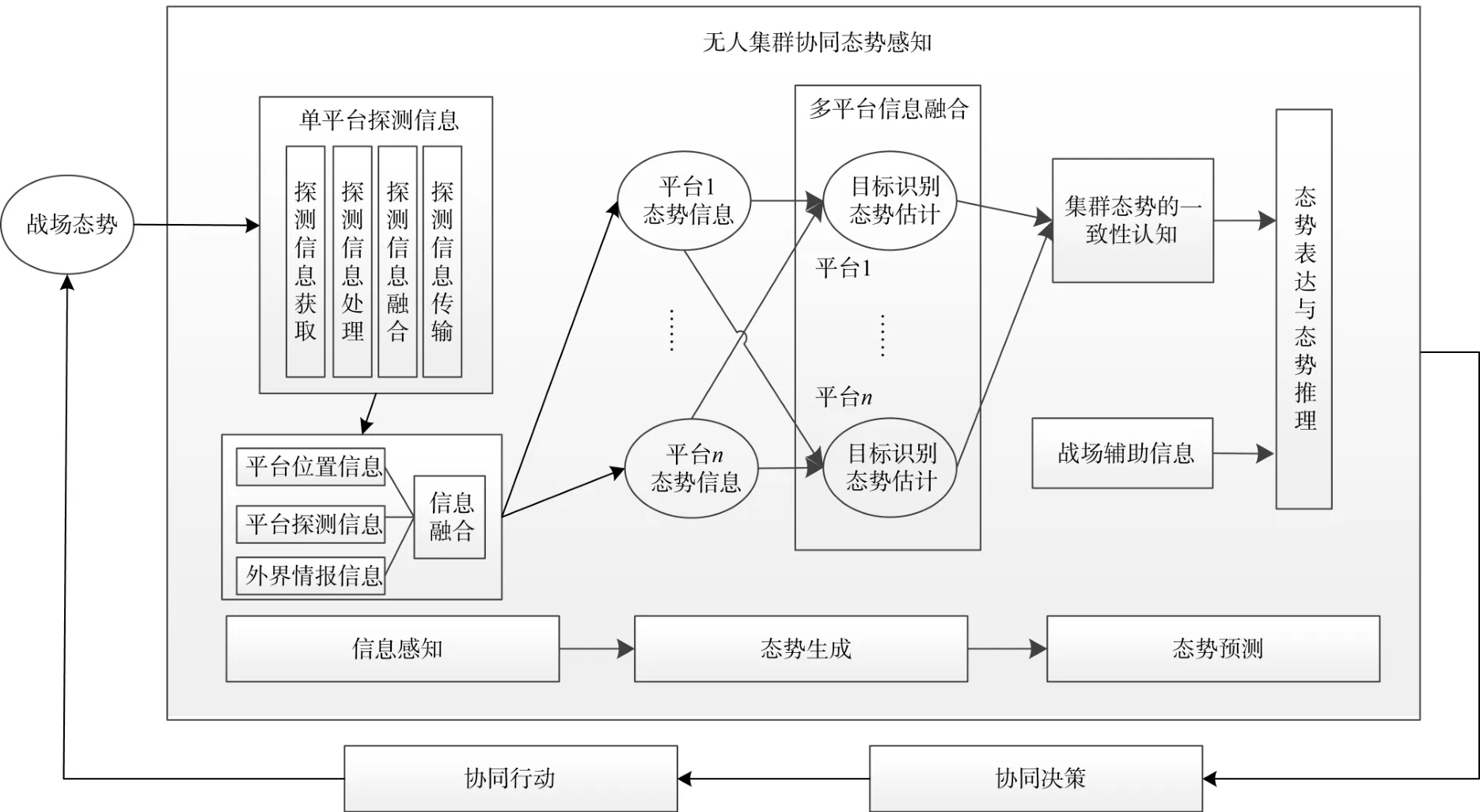
图5 水下无人集群协同作战活动图Fig. 5 Cooperative operation of underwater drone swarm
2.2 目标综合识别困难
目标综合识别是指对来自多个传感器的目标身份识别信息进行综合,以得到对目标身份的联合估计,是支撑水下无人集群态势生成的核心内容之一[8]。水下无人集群的覆盖范围广、类型多样,不同海域的海洋环境差异较大,传感器探测效能受海洋环境影响大[9],水下节点采集的多源异构信息中蕴含目标的多模态特征信息,不同平台传感器探测到的目标数据信噪比存在差异、数据质量参差不齐,为目标综合识别过程带来了困难。
2.3 态势推理精确度低
态势推理是指对战场目标和战场环境结合产生的事件和活动进行推理,用来解释当前战场态势并判断目标意图。然而受限于水下低维、大误差、零碎的探测信息,以及水声通信延迟和信息分发障碍导致的数据时延大、周期性弱,数据具有残缺性和错误性,使得水下态势信息模糊度高、不确定性大,造成态势推理可信度不高,难以实现精确态势感知。
2.4 群体态势认知困难
水下无人集群各作战单元获取的战场态势及其演变进程过于碎片化,需通过信息共享与群体协作认知才能形成全局态势,由于不同节点信息处理模型的差异性,导致对态势理解的粒度、置信度等存在较大差异,通过融合实现水下无人集群态势综合认知与统一解释困难。
3 关键技术及解决思路
针对水下无人集群态势生成过程中的态势要素表示、目标综合识别、态势推理以及群体态势认知过程中的问题,分别提出基于知识图谱的态势要素多维度描述方法、不确定信息条件下的多节点智能融合、基于异构信息的目标联合识别、基于智能模板匹配和贝叶斯网络融合的态势推理技术以及基于作战意图的传感器任务分配技术。
3.1 基于知识图谱的态势要素多维度描述方法
传感器获取的环境及有关侦察对象的信息描述,包括信息类型、当量(空域、时域、频域和能量等)、传播方式及路径、环境背景等[10]。其中,目标信息可以用截获的内涵、图像以及目标主动辐射或被动散射的各种信号形式表征。
以知识图谱构建与管理利用等为支持手段,自底向上开展水下无人集群态势生成要素的研究、定义与提取,采用基于Agent 的活动建模方法,基于战场规则研究态势要素间的相互关系,对水下无人集群态势生成活动中的要素资源信息内部逻辑进行深度挖掘关联,综合元素间的依赖关系、水下无人集群演进对态势要素表示架构的影响等因素,生成态势要素表示的演化路径,实现对水下无人集群态势生成流程、机理、效果与战场环境信息的多维度动态描述。
3.2 不确定信息条件下多节点智能融合技术
水下传感器监视与跟踪的方式是多样化的,其探测区域可能重叠,并且采样以及传感器种类可能不同,每个传感器已对原始的目标量测进行了预处理形成了局部航迹,这些特点决定了水下多传感器信息的不确定性,其航迹融合处理有别于岸、舰传统的航迹处理方法[11],融合处理过程需要对所有传感器的局部航迹进行空间、时间上的对准,相关互联,最终进行融合,形成全局意义下的高精度航迹。
针对UUV、浮/潜标、水下固定/移动式传感器网络、水下滑翔机、预置武器等体系内各类节点探测/观测信息,分析信息在时间、空间维度等方面存在的不连续、欠冗余、不一致等特性,建立自适应分层信息融合处理结构,满足多节点弹性接入需求,针对信号级/特征级/数据级协同信息的具体变化,研究基于前后向估计的多节点多目标智能关联与融合处理、分布式节点探测目标时空协同定位、多目标运动要素解算等技术,适应失序、大误差等水中苛刻情况,形成连续精炼的目标航迹。
3.3 基于异构信息的目标联合识别技术
常用的目标特征信息包括目标的属性、类型、信号幅度、辐射源参数信息等,一般地说目标的属性、类型的确定依赖于目标的信号幅度、辐射源信息。异构信息的目标关联识别基础是提取异类特征矢量的共性特征,如位置与运动参数等,进行自动关联处理,对不能自动关联的异类特征,进行特征的预处理与整合。
构建混合式目标综合识别体系结构,开展水下无人集群的网内一致性身份认证处理,充分利用岸海空天等外部多源情报信息,同时利用深度网络深化对敌方目标的个体识别,基于信息预设及先验知识特征筛选,完成水中目标自主印证识别与打击目标确认,建立多维异构的目标特征关联度计算方法库,根据特征信息的不同选用合适的关联度计算方法。
3.4 基于智能模板匹配和贝叶斯网络融合的态势推理技术
传统的模板匹配态势推理算法关注战场中目标行为和态势模式之间的相关关系,采用深度网络、根据历史经验和专家知识训练生成自适应的智能模板匹配模型,可以有效降低态势推理的算法复杂度,但无法解决水下无人集群作战中战场数据和态势模式的不确定性[12]。因此,采用基于贝叶斯网络的计划识别方法,建立相应的贝叶斯网络模型,包括2 部分内容:水下无人集群网络结构的构造和网络参数(条件概率参数)的确定,形成网络节点间的相互解析关系。
在进行贝叶斯网络推理的过程中,将获得的态势要素信息作为证据,对相应的贝叶斯网络进行实例化,即将该态势要素信息作为某个节点的证据信息,并与贝叶斯网络中的节点进行匹配,匹配的主要依据是该态势要素的类型与网络节点所表示的态势知识类型,如:获得的“鱼雷攻击”战场事件与某贝叶斯网络模型中的表示武器攻击事件的节点间的匹配。该方法理论上能够利用智能模板匹配结果修正贝叶斯推理中的不确定性问题,并利用贝叶斯网络对智能模板匹配中的弱信息进行补偿,以此有效改进水下无人集群战场态势推理精度低问题。
3.5 基于作战意图的传感器任务分配技术
传统自顶向下的命令式传感器管控和任务分配方法,无法满足水下长时延、低带宽、不连续通信条件下,广域分布的探测节点面向作战目标的协同探测需求,加上水下无人集群内探测节点动态变化,水下无人集群的探测资源难以实现有效的灵活管控。
开展机动、固定、分布式传感器的元素特性、运行机理、任务运筹、控制约束等理论体系和模型方案研究,构建面向作战意图的传感器管控和任务分配孪生系统,具备在时间、空间和功能上进行传感器优化协同训练与评估能力,在虚拟空间将传感器组织与作战意图进行智能化映射,形成分布式、自适应的策略库和策略优选算法,具备在传感器平台物理实体的快速部署能力,并采用数字信息素等无人集群分布式协同方法,逐步实现水下分布式传感器面向作战意图的任务自分配、资源自优化。
4 结束语
在以信息为主导的水下无人集群作战活动中,作战海域广阔、环境复杂多变、战场信息不完整等给水下无人集群协同态势生成带来极大挑战。本文分析了水下无人集群态势生成的必要性以及主要困难,并针对性提出了相应的技术路线和解决思路,但水下无人集群态势生成仅依靠上述技术仍无法解决水下无人集群作战中战场态势透明问题,还需要结合水下无人集群作战概念研究,从体系运用的角度牵引水下无人集群体系设计与相关技术发展,持续推进水下无人集群的作战效能提升。
猜你喜欢
汽车与安全(2020年1期)2020-05-14 13:27:19
中国外汇(2019年19期)2019-11-26 00:57:36
中国化肥信息(2019年5期)2019-06-25 00:52:28
小哥白尼(军事科学)(2019年2期)2019-04-17 02:17:28
小哥白尼·趣味科学画报(2019年12期)2019-02-28 11:55:02
数理化解题研究(2017年4期)2017-05-04 04:07:54
岷峨诗稿(2017年4期)2017-04-20 06:26:43
新高考(英语进阶)(2017年12期)2017-02-26 11:37:34
铁道通信信号(2016年6期)2016-06-01 12:10:20
电子器件(2015年5期)2015-12-29 08:43:15