水下无线光通信中关键技术的研究与进展
2023-04-24 09:19:10梁静远王醒醒张晓丹柯熙政
数字海洋与水下攻防 2023年2期
梁静远,王醒醒,李 征,张晓丹,宋 鹏,赵 黎,柯熙政,4,*
(1. 西安理工大学 自动化与信息工程学院,陕西 西安 710048;2. 西安工程大学 电子信息学院,陕西 西安 710600;3. 西安工业大学 电子信息工程学院,陕西 西安 710021;4. 陕西省智能协同网络军民融合共建重点实验室,陕西 西安 710048)
0 引言
水下无线光通信(Underwater Wireless Optical Communication,UWOC)是以光作为载波实现信息传输的一种通信方式。UWOC 的优点有通信速率高、时间延迟小、安全性好、成本低等。近年来,研究者们对UWOC 系统中的关键技术进行了大量的研究,包括调制编码技术、探测技术、光源选择及信道模型的建立等方面。伴随着互联网的发展和6G 时代的到来,把结合互联网的无线光通信应用到海洋的探索必定是未来发展的趋势,而研究水下通信中的关键技术是为未来海洋的探索提供方法和技术。
本文通过对UWOC 的传输特点进行简单的介绍,总结并讨论了UWOC 中的关键技术和进展,包括信道建模、光源的选择、编码调制技术及探测技术,并总结了UWOC 面临的难点及未来的发展方向。
1 水下无线通信
人们对海洋的探索需要实时高速的通信来传输音频、图片和视频等信息。传统的通信利用有线技术来实现信息的传输,如光纤、电缆。但是有线通信受水下环境影响非常大,存在维护困难及费用较高等问题,所以近年来为了克服有线通信的缺点,人们把无线通信利用在水下通信系统中。水下无线通信使得我们对海洋的探索得以实现,也受到了越来越多研究者的关注。水下无线通信包括水声通信、水下射频通信和水下光通信[1]。
现在比较成熟的是利用声波技术来实现水下无线通信,也是应用最广泛的一种技术。经过2 次世界大战之后,水声通信得到了迅速的发展[2]。由于声波属于机械波,在水中的衰减很小,所以声波在水中的传输距离比较长,但是声波在水下传输时需要的时间延迟比较大,通信速率只能达到 kbps量级[3]。声波在短距离、无多径效应下的带宽很难超过 50 kHz[4],而在复杂的环境中,声波的通信速率可能会低于 1 kbps[5]。声波通信对海洋中的生物也有害[6],而且容易被窃取,保密性差,系统设备体积庞大,功耗大,无法满足水下通信体积小、功耗低的要求[7]。
射频信号在水下的穿透能力与射频信号频率有关。低频射频信号的频率范围是30 kHz ~ 300 kHz,在水中传输距离是几米;甚低频射频信号的频率范围是0.003 kHz ~ 30 kHz,在水中的传输距离是10 ~20 m;极低频射频信号的频率范围是30 kHz ~ 300 kHz,在水中的传输距离是100 ~ 200 m[7]。潜艇等水下设备通常使用超低频和甚低频进行有限的通信,通信速率只有300 bps 左右[8]。但产生低频、甚低频、极低频的信号,需要极大功率的发射天线[9]。由于海水的导电性非常好,会激起感应电流消耗掉电磁波的能量,使射频信号在水下传输时受到严重的衰减,导致射频信号在水下通信距离有限,仅适用于近距离的水下通信,无法完成未来远距离、高速率的水下信息传输任务[10]。
由于水声通信和射频通信有着有一定的局限性,所以UWOC 才得以发展。光通信因其具有更高的频谱效率而被作为一种新兴的技术,受到了学术界的广泛关注。可见光通信拥有高频段的频谱(400 THz ~ 800 THz),适用于高速通信技术,通信距离可达百米,通信速率高达Gbps 量级[11],而且其体积比前2 种小得多,带宽利用率高,耗能比较低,光束指向性好,发散角小,安全性高[12]。由于光波的频率高于声波和电磁波,因而使其具有较强的信息承载能力,可构建大容量的无线通信系统[13]。基于这些优势,UWOC 技术成为水下通信的研究热点。但是UWOC 也存在不足之处,由于光在水下传播时受水下信道的散射吸收和水下湍流的影响,使其通信距离受到了限制。表1 是对不同水下无线通信技术存在的优缺点进行了对比分析。
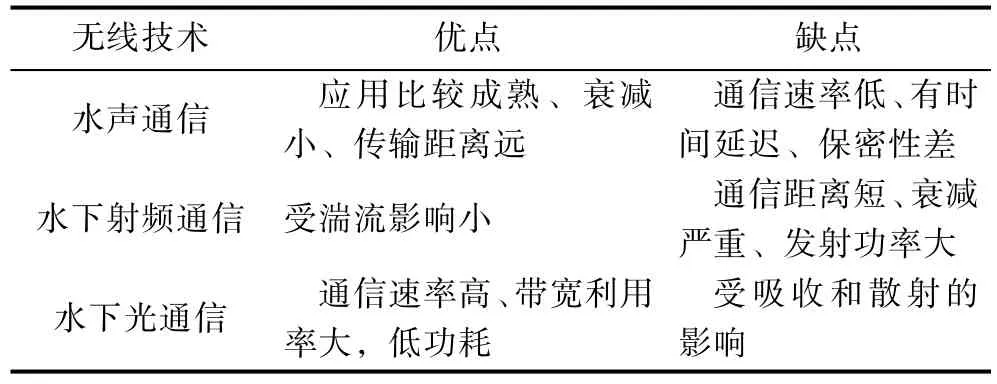
表1 不同水下无线通信技术的优缺点Table 1 Advantages and disadvantages of different underwater wireless communication technologies
book=217,ebook=102
2 水下无线光通信系统的模型及研究现状
2.1 系统模型
水下光通信系统包括发射设备、水下信道和接收设备3 大部分,图1 是水下无线光通信系统的模型。发射端包括光源、信号处理、编码调制处理、驱动电路、发射天线;接收端包括探测器、译码解调处理、滤波器和输出信号单元。水下信道比较复杂,理论上可以认为水下信道包括水下湍流信道、吸收散射因子等影响通信的因素和噪声。水下无线光通信系统的工作原理为:在发射端,将发送的信号经编码器编码后,由调制器将其转换为随信号变化的电流,再经过驱动电路把电流加载到光源上,最后通过发射天线发射出去。在接收端,接收天线将发送过来的光束进行汇聚到探测器表面,然后探测器把光信号转换成电信号,再经过解调器对信号进行解调,最后恢复出原始的信息。
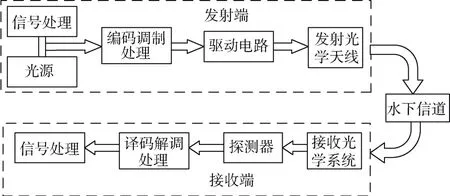
图1 水下无线光通信系统Fig. 1 Underwater wireless optical communication system
2.2 国外研究现状
自20 世纪60 年代起,人们就开始了对水下光通信系统的研究与探索[1]。1963 年,DUNTLEY 等人[14]发现470 ~ 570 nm 的蓝绿光在水中的衰减比其它波段要小得多,也即存在一个低耗能窗口。这个发现为后来的水下光无线通信系统研究中光源的选择提供了参考。
水下无线光通信最初应用于军事领域的对潜通信中。1968 年,GORDON[15]首次论证了水下激光测量的可行性并建立了世界上第1 个利用激光技术测量海水深度的系统。1976–2010 年,国外科研人员完成了初步的UWOC 可行性的实验,并得到了一系列的研究成果,如提出了不同的方法来设计 UWOC 通信系统,采用不同的调制技术使UWOC 系统的通信距离达到最大。具体的实验成果在表2 和表3 中有简要的介绍。下面是近年来UWOC 系统的研究现状。
2010 年,SIMPSON 等人[16]采用了数字信号处理和纠错技术,把470 nm 的LED 作为发射光源,用光电倍增管作为接收端的探测器,分别在3 m 和7.7 m 的水箱中进行了测试,测试速度为5 Mbps,该实验在误码率为10–5的情况下,信噪比与未编码数据相比改善了提高了4 dB。
2011 年,VUCIC 等人[17]使用大功率白光LED作为光源,雪崩光电二极管作为接收端的探测器,采用正交幅度调制的方式,成功完成了数据传输速率为513 Mbps,误码率小于2×10–3的水下实验。
2012 年,GABRIEL 等人[18]用532 nm LED 发射器和硅PIN 光电二极管接收器,并采用开关键控的调制方式,通过研究误码率对该系统进行了评估,实现了数据传输速率为1 Gbps,通信距离为20 m、误码率为10–6的水下实验。
2013 年,COSSU 等人[19]使用2 个低成本发光二极管阵列作为光发射器,1 个雪崩光电二极管模块作为接收器,采用Manchester 编码方式,在一个直径为3.3 m 的室外水箱中成功实现了通信速率为6.25 Mbps 的水下实验,而采用离散多音调制方式时,通信速率高达58 Mbps。实验结果表明,在所有实验条件下都可以实现无差错传输。
2014 年,HISKETT 等人[20]用450 nm 的激光二极管作为发射端的光源,接收端采用硅雪崩光电二极管设计了一套水下通信系统。实验结果表明,在1 m 长的水槽中数据传输速率高达45.32 Mbps,误码率为1.8×10–4。
2015 年,NAKAMURA 等人[21]利用强度调制/直接检测–正交频分复用的方法,采用雪崩光电二极管作为探测器,完成了405 nm 的蓝色激光二极管在4.8 m 的水下通道中传输的实验,通信速率高达1.45 Gbps,误码率为9.4×10–4。
2016 年,OUBEI 等人[22]使用商用TO-9 封装book=218,ebook=103的520 nm 辫状激光二极管和雪崩光电二极管,并用非归零–开关键控调制方案,实现了传输距离超过7 m,接收数据的误码率为2.23×10–4,通信速率高达2.3 Gbps 的高速水下通信实验。
2017 年,OUBEI 等人[23]采用TO-9 封装的450 nm 辫状激光二极管,采用16–正交幅度调制–正交频分复用的调制方式,实现了传输距离为5.4 m,通信速率高达4.8 Gbps,误码率为2.6×10–3,信噪比为15.63 dB 的高速水下通信实验。
2018 年,HALAFI 等人[24]设计了一种在水下能实现双向通信的水下视频传输系统。该系统的上行和下行链路的发射光源分别是450 nm 蓝色激光二极管和520 nm 绿色激光二极管,接收端探测器使用的都是雪崩光电二极管,在通信距离为4.5 m时,采用16–正交幅度调制和64–正交幅度调制的方式时,通信速率可达30 Mbps,在港口海水中的峰值信噪比高达16 dB。
2019 年,TSAI 等人[25]提出并演示了一个采用四电平脉冲幅度调制的水下无线激光传输系统。该系统在12.5 m 管道水下通道/2.5 m 高浊度港口水下通道上配备了一个光束缩束/扩束器,实现了数据传输速率为15 Gbps/30 Gbps,接收数据的误码率为2.4×10–7/2.4×10–6的水下实验。在高度混浊的海港水下链路中,四电平脉冲幅度调制系统的光接收器接收到的大量散射光,会随着配备了光束缩束/扩束器而变得更好。
2020 年,RAMAVATH 等人 使用开关键控的调制方式,利用双曲正切分布计算了单输入单输出、单输入多输出、多输入单输出和多输入多输出链路在非编码和RS 编码情况下的新的闭合形式解析误码率表达式,并用蒙特卡罗仿真结果进行了验证。在水下的数据传输速率为500 Mbps,通信距离为30 m,接收数据的误码率为10–5,实现了潜艇间通信、潜艇到码头通信、采集海洋参数的传感器之间的通信和聚合设备等水下物联网应用。
2020 年,ARVANITAKIS 等人[27]使用6 个450 nm 发光二极管阵列作为发射光源,接收端探测器使用的是PIN 光电二极管,采用开关键控的调制方式,成功实现了通信速率为4.92 Gbps/3.22 Gbps/3.4 Gbps,通信距离为1.5 m/3 m/4.5 m,误码率为1.5×10–3/1.1×10–3/3.1×10–3的水下通信实验。
2022 年,KONG 等人[28]提出了一种扩散视距的2K 实时数字视频水下监控系统,该系统采用458 nm发光二极管作为光源,视频流通过由视频编码和开关键控调制组成的发送器电路进行处理,在1.5 m 纯水通道、1.53 mL/s 气泡诱导的湍流纯水通道等多种通道,实现了通信速率为2.5 Mbps,接收数据的误码率为5.31×10–4的实时视频传输系统。
依据水下光通信系统模型的建立可将国外研究现状总结如表2 所示。而依据水下光通信系统中的通信速率分别为kbps,Mbps,Gbps,可将国外研究进展总结如表3 所示。
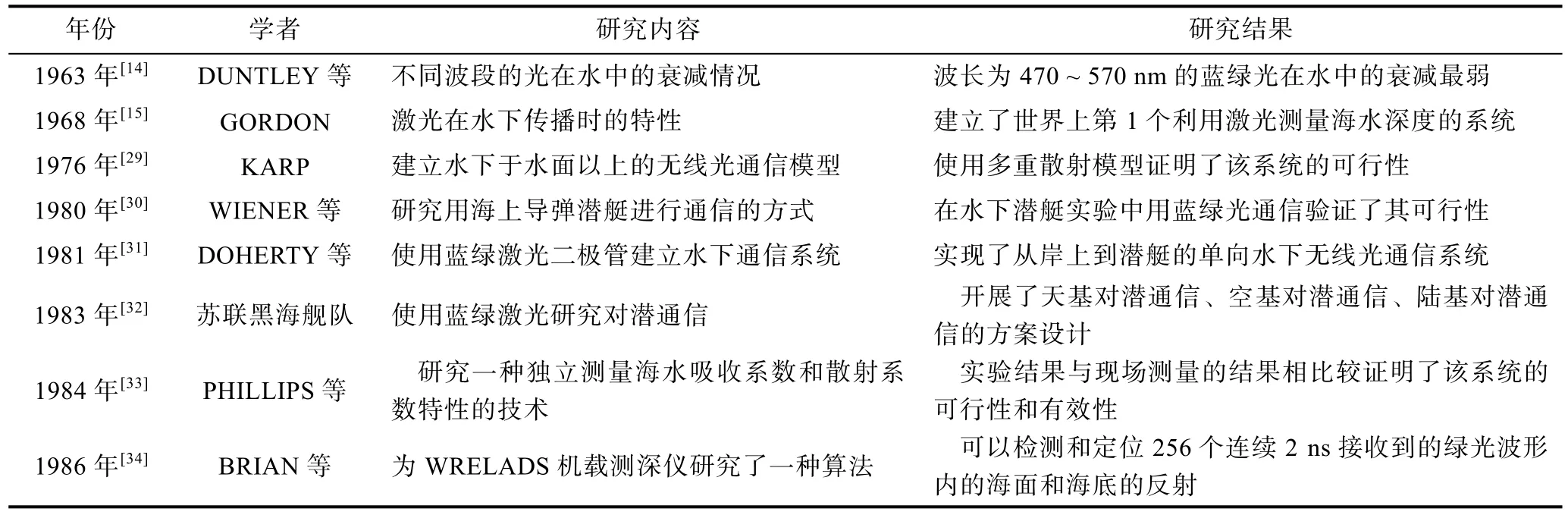
表2 水下光通信系统模型的国外研究进展Table 2 Research progress of underwater optical communication system models abroad
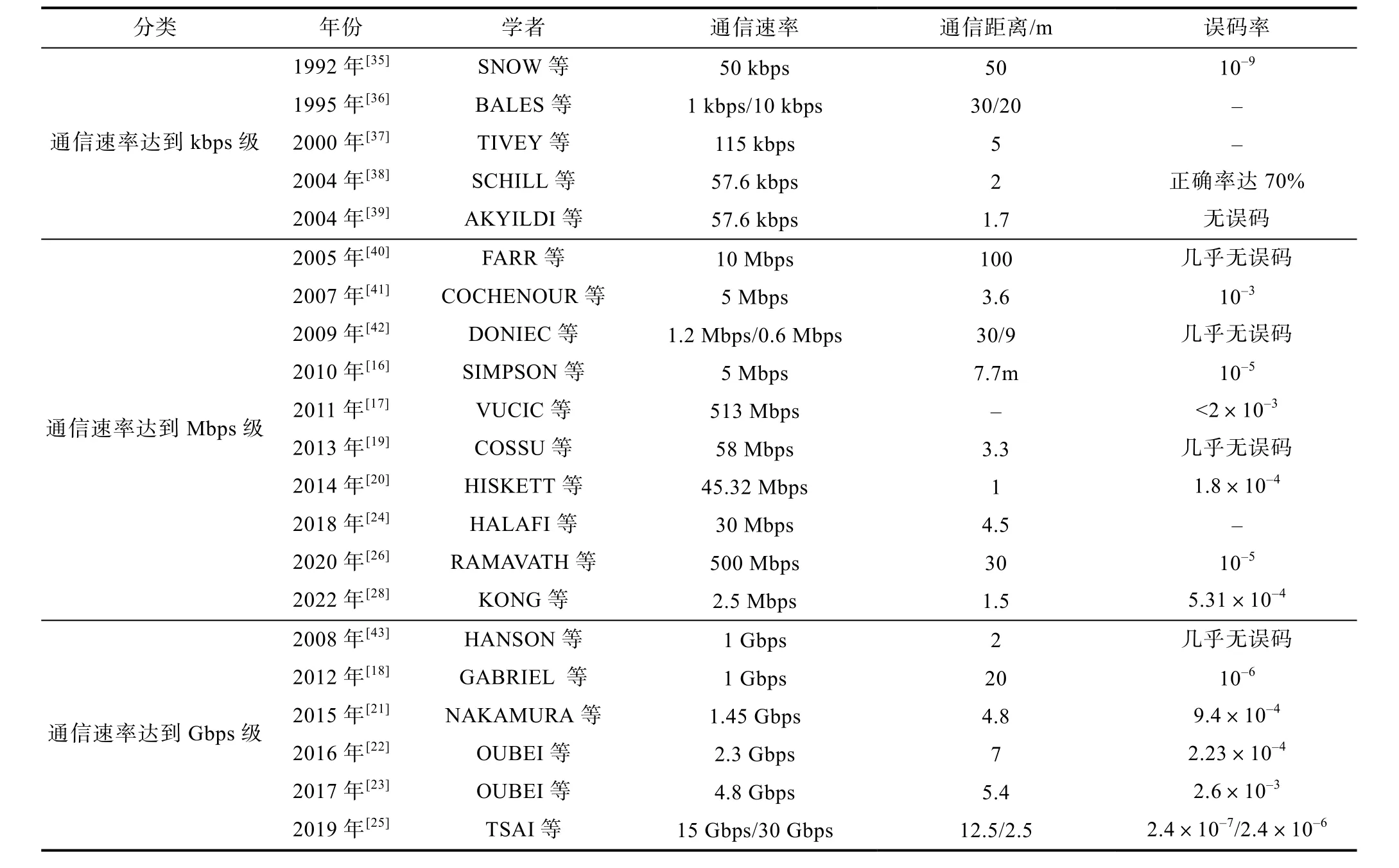
表3 通信速率分别为kbps、Mbps、Gbps 级的国外研究进展Table 3 Overseas research progress on communication rates of kbps, Mbps and Gbps respectively
book=219,ebook=104
从UWOC 系统的国外研究现状可以看出,研究人员企图通过水下无线光通信的调制方式和选择不同的光源来提高数据传输速率,增大传输距离,并通过各种仿真模型对水下无线光通信系统进行分析,将仿真得到的通信速率、通信距离等数据分析与工程试验进行对比,通过实验验证理论数据的推导,从而使得水下无线光通信系统的通信性能得以提升。
2.3 国内研究现状
我国是从20 世纪90 年代开始研究水下光通信对潜技术。1995–2010 年,国内许多研究学者对UWOC 系统进行了研究,提出了很多提高通信系统性能的方法,主要是对UWOC 系统中用到的调制技术和编码方式进行了实验,使通信距离和通信速率达到最大,取得了很好的研究成果。具体研究成果在表4 和表5 中有简要的介绍。下面是近年来国内UWOC 系统的研究现状。
2010 年,刘金涛等人[44]使用蒙特卡洛仿真方法模拟了卫星接收到的水下平台上行激光链路的性能,采用脉冲位置调制和最大似然估计的方法,计算了通信系统的误码率小于10–4,提出了水下60 m 与卫星的上行激光通信方案。
2012 年,丛艳平[45]介绍了一种自适应水下光通信网络框架的结构,根据不同的编码方案,研究了一种应用于水下光通信系统中的自适应解码方案。完成了数据传输速率为3 Mbps,通信距离为20 m,误码率为4×10–4的水下实验。
2012 年,汪峰等人[46]研究了一种可以压缩信号动态范围的水下光通信系统,采用可变增益放大器实现压缩信号的动态范围,使信号最终趋于稳定。该方法既能使信号的动态范围缩小,又有效提高了数字模拟转换器的精度,能很好地适用于水下光通信系统。
2013 年,TIAN 等人[47]设计并实现了一种基于发光二极管的水下光通信系统,在实验中采用RS232 串行通信协议进行信息的编码和解码,通过book=220,ebook=105调整不同速度的通信波特率,最终实验结果表明,数据传输速率为38.4 kbps,通信距离达到30 m。
2013 年,胡秀寒等人[48]设计了一种采用数字信号处理的高速水下通信系统,该系统的发射端光源使用的是532 nm 激光二极管,接收端探测器使用的是光电倍增管,采用脉冲位置调制和RS 编码的方式,在 100 m 的水池中实现了通信速率为73 kbps 的无误码全双工水下通信实验。
2014 年,逄涵涵[49]使用蓝色发光二极管,在实验室10 m 的水箱中,成功实现了通信速率为1 Mbps 的实验。最后用超亮蓝色发光二极管,成功实现了通信距离为13 m,通信速率达到3 Mbps的水下实验,实验结果表明接收到的文件误码率为8×10–9,几乎没有误码。
2015 年,蔡文郁等人[50]在水下通信系统中,发射光源使用的是蓝绿发光二极管,接收端探测器使用的是光电二极管,在实验室10 m 的水箱里,实现了数据传输速率为115.2 kbps,几乎无误码的实验。
2016 年,徐敬等人[51]介绍了一种强度调制/直接检测–正交频分复用的水下光通信系统。该系统使用蓝色发光二极管作为发射光源,PIN 光电二极管作为接收探测器,在2 m 的水下信道中,采用16–正交幅度调制方式、32–正交幅度调制方式、64–正交幅度调制方式,完成了通信速率分别为161.36 Mbps、156.31 Mbps、127.07 Mbps,误码率分别为2.5×10–3、7.42×10–4、3.17×10–3的水下实验。
2016 年,SHEN 等人[52]使用单模450 nm 激光二极管和硅雪崩光电探测器并利用简单的非归零-开关键控调制方式实现了小型和低功耗的水下通信系统。在12 m 的水下信道中,接收到的数据误码率为2.8×10–5,通信速率高达2 Gbps;在20 m的水下信道中,接收到的数据误码率为3.0×10–3,通信速率高达1.5 Gbps。
2016 年,胡锋等人[53]研究了一种蓝光LED 的水下双向通信系统,该系统采用光电二极管作为接收端探测器,实现了通信距离为5 m,通信带宽高达60 MHz 的无误码全双工水下通信实验。
2016 年,周田华等人[54]把蓝绿激光二极管作为水下系统的发射光源,探测器使用雪崩光电二极管,将低密度奇偶校验码和脉冲位置调制的方式结合起来形成一种简化软解调方法,并通过MATLAB仿真验证了采用该简化软解调方法的误码率性能优于RS 码,证明了该方法在水下光通信系统中的有效性。
2017 年,LIU 等人[55]使用520 nm 绿色激光二极管,采用开关键控的调制方式,成功完成了通信距离为34.5 m,通信速率高达2.7 Gbps,接收到的数据误码率小于3.8×10–3的水下实验。并实验证明了,在水下距离为2.3 m、6.9 m、11.5 m、16.1 m和20.7 m 时,最大数据速率分别达到4.60 Gbps、4.20 Gbps、3.93 Gbps、3.88 Gbps 和3.48 Gbps。
2017 年,CHEN 等人[56]使用单模辫状绿色激光二极管作为光源,调制技术为32–正交调幅–正交频分复用,在21 m 的水下信道中成功完成了5.3 Gbps 的无功率负载上行传输,接收到的数据误码率为2.47×10–3,以及5.5 Gbps 的有功率负载下行传输,接收到的数据误码率为2.92×10–3的实验。
2017 年,敖珺等人[57]使用蓝绿LED 作为发射光源,采用脉冲位置调制的方式,接收端探测器使用的是光电二极管,成功完成了数据传输速率为10 Mbps,通信距离为2.3 m,无误码的多输入多输出的水下实验。
2018 年,HUANG 等人[58]采用16–正交振幅调制–频分复用的调制方式,并用蓝色激光二极管作为发射光源,实现了通信距离为1.7 m,接收到的数据误码率为1.9×10–5,数据传输速率为14.8 Gbps的水下实验。接着完成了通信距离为10.2 m,接收到的数据误码率为 1.5×10–4,数据传输速率为10.8 Gbps 的水下实验。
2018 年,王鸿喜等人[59]设计了一种采用脉冲位置调制的水下光通信系统,该系统使用450 nm蓝色发光二极管作为发射光源,雪崩光电二极管作为接收端的探测器,在实验室中实现了通信距离为6 m,通信速率高达0.98 Mbps 的无失真传输实验。
2018 年,韩彪[60]采用472 nm 蓝光LED 作为发射光源,接收端探测器使用的是光电倍增管,并采用开关键控调制方式,使用RS 编码和蒙特卡罗book=221,ebook=106仿真方法成功实现了最远通信距离为9.6 m,最大通信速率为20 Mbps,误码率为10–9的水下双向网络视频传输实验。
2018 年,杨杰等人[61]在水下通信系统中采用大功率蓝绿 LED 作为发射光源,使用光电倍增管作为探测器,采用脉冲位置调制的方式,在实验室的水箱中,成功完成了通信距离为3 m,数据传输速率为6 Mbps,误码率为7×10–4的水下通信实验。
2019 年,WANG 等人[62]在水下通信系统中使用520 nm 绿色激光二极管,采用开关键控的调制方式,在自来水中,成功实现了通信速率高达500 Mbps,通信距离为100 m,误码率低至2.5×10–3的水下实验。根据测量的最小所需功率和水下信道中的功率衰减模型,预测传输性能为146 m/500 Mbps 和174 m/100 Mbps。
2019 年,HONG 等人[63]使用450 nm 激光二极管,采用离散多音调制方式,利用概率星座整形技术来逼近离散多音传输的信道容量极限,可用调制带宽为2.75 GHz,实现了通信距离为5 m、25 m、35 m,净数据传输速率分别为18.09 Gbps、17.21 Gbps、12.62 Gbps 的水下实验,与常规的正交幅度调制方式相比,容量分别提高了32.22%、30.03%、27.55%。
2019 年,姜晓等人[64]在我国南海采用由486.1 nm和532 nm 蓝绿波段组成的双波长多通道激光雷达开展了探测实验。实验结果表明,利用该激光雷达可以实现最远的通信距离为160 m,通信速率比使用传统的532 nm 蓝绿激光二极管提高了30%。
2020 年,JI 等人[65]提出了一种可以应用在水下无线光通信中的低复杂度的两级混沌加密方案,利用离散傅立叶变换扩展离散多音调制技术。实验结果表明,加密对所提出的水下光通信系统的性能没有负面影响,成功实现了通信距离为50 m/55 m,通信速率为5 Gbps/4.5 Gbps 的水下实验。
2020 年,敖珺等人[66]介绍了一种使用深度学习算法来恢复水下扭曲图像的方法。仿真结果表明,该方法能有效的恢复在水下传输的图像,而且系统使用该算法使图像的传输速率增大了,平均运行时间仅为0.78 s,而传统迭代算法的运行时间超过20 s。
2020 年,吴宜欣[67]研究了基于光电阵列的水下定位通信系统的设计,该系统采用发光二极管作为发射光源,接收端采用由32 个光电二极管组成的曲面阵列探测器,利用四进制脉冲位置调制的方式,通过分析不同接收角度下的误码率,当接收角度小于50°时,误码率为1.248×10–6;当接收角度大于50°时,误码率为6.234×10–3,实现了精确的定位通信实验。
2021 年,董冰等人[68]采用4 个470 nm 蓝色发光二极管组成一个光源阵列,接收光端机利用菲涅尔透镜成像来实现大视场接收的目的,探测器使用的是雪崩光电二极管,在20 m 的水池中,完成了通信速率高达5 Gbps,误码率低至10–6的水下通信实验。
2021 年,徐敬等人[69]提出使用5 倍扩频增益的软扩频软件来提高水下光通信系统的接收灵敏度,仿真验证了扩频技术可以延长通信距离。实验结果表明,在信号带宽为200 MHz 条件下,使用该技术将系统接收端灵敏度提升到–32.5 dB·m,提升了4.8 dB,相当于通信距离延长5.8 m。
2021 年,贺锋涛等人[70]研究了一种自适应对准的水下光通信系统,该系统使用大功率蓝色激光二极管作为发射光源,接收端采用雪崩光电二极管作为探测器,在通信距离为30 m 的水池中实现了100 Mbps 的无误码水下实验。
2021 年,马春波等人[71]设计了一套采用新型的水下图像传输方法的高速水下视频传输系统。该系统采用蓝绿LED 作为发射光源,采用脉冲位置的调制方式,完成了通信距离为1.4 m,误码率低于10–6的高清视频传输实验。
2021 年,李晓记等人[72]研究了一种采用数字预均衡技术的直流偏置光–正交频分复用水下光通信系统,该系统使用蓝绿LED 作为发射光源,探测器使用的是光电二极管,在清水中成功完成了通信距离为1 m,数据传输速率为32 Mbps,误码率低于10–3的水下实验。
2021 年,李金佳等人[73]研究了一种多输入多book=222,ebook=107输出的水下光通信系统,该系统使用6 个蓝绿LED阵列作为发射光源,接收端探测器由3 个光电倍增管组成,在实验室10 m 深的水槽中完成了数据传输速率为1 Mbps,误码率为1.1×10–5,信噪比为19.4 dB 的水下通信实验。
2022 年,FEI 等人[74]使用450 nm 的激光二极管,采用开关键控的调制方式,在实验室的水箱中,完成了数据传输速率高达3 Gbps,通信距离可达100.6 m,误码率低至4.2×10–5的水下实验。
2022 年,西安理工大学柯熙政团队[75]利用蓝绿LED 光源,并采用开关键控的调制方式,设计了一种接收天线利用复眼透镜组成的双层复眼透镜的水下光通信模型,并在实验室中通过不同悬浮颗粒浊度、不同传输距离对系统进行测试,验证了系统的可行性。
2022 年,石佳等人[76]研究了一种利用深度学习端到端的方式对水下光通信系统的信道进行直接检测的方法,用该方法对水下通信系统的信噪比和误码率进行了研究比较。实验结果表明,与传统的最小均方算法相比,该深度学习算法有着更加优越的性能,在通信距离为15 m 时,信噪比为67 dB,误码率为7.02×10–4。
2022 年,李碧丽等人 研究了一种大功率水下激光发射系统装置,该系统光源采用532 nm 绿光激光二极管,该绿光二极管的平均功率高达2 W。实验结果表明,使用大功率激光二极管时,通信距离高达150 m,通信速率可达1.2 Mbps,误码率为3.5×10–4的水下光通信实验。
依据水下光通信系统中的技术研究可将国内研究进展总结如表4 所示。而依据水下光通信系统中的通信速率分别为kbps、Mbps、Gbps,可将国内研究进展总结如表5 所示。
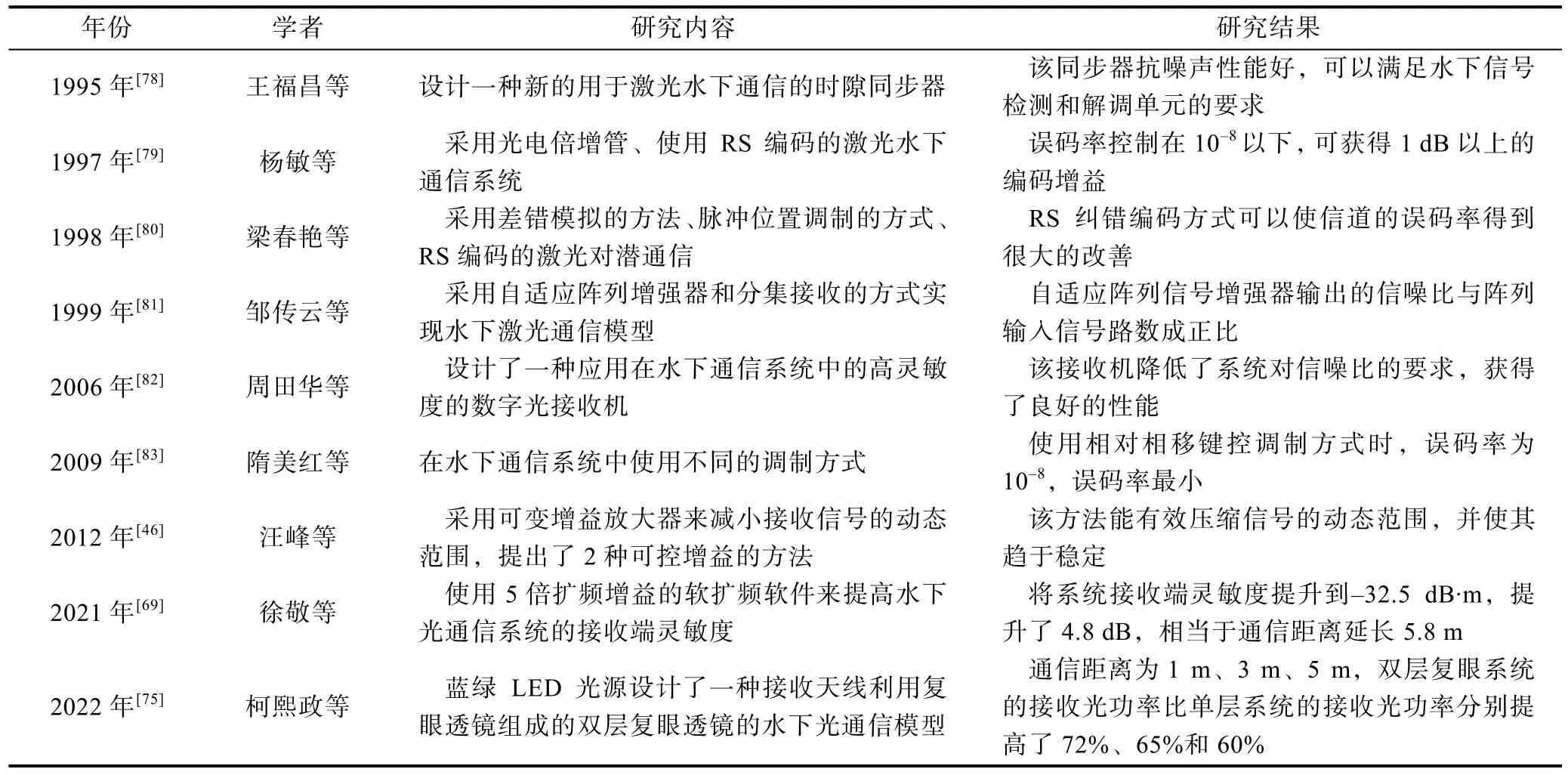
表4 水下光通信系统中技术研究的国内进展Table 4 Domestic progress of technology research on underwater optical communication system
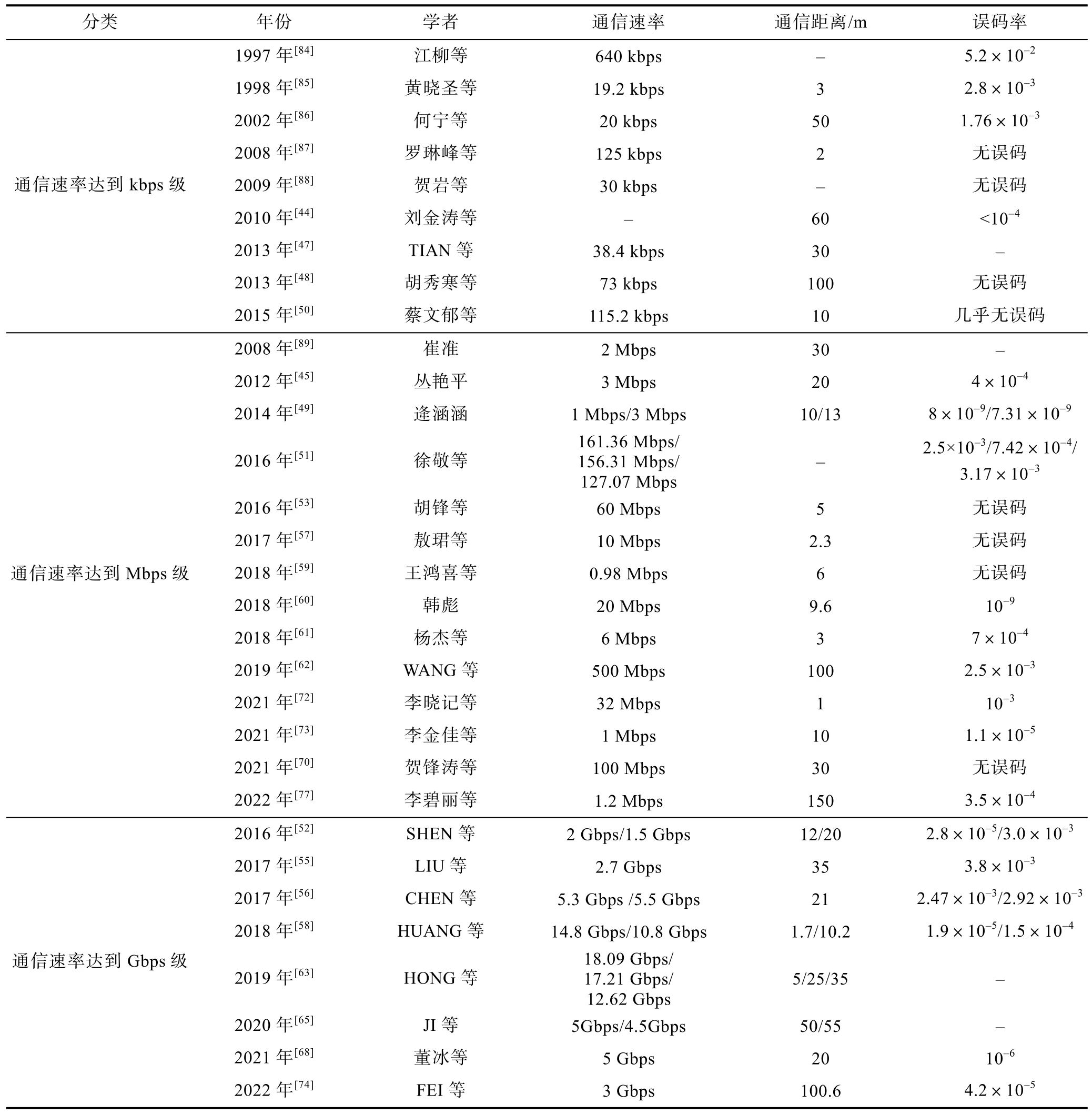
表5 通信速率分别为kbps、Mbps、Gbps 级的国内研究进展Table 5 Domestic research progress on communication rates of kbps, Mbps and Gbps respectively
目前,UWOC 系统的通信距离通常只能达到几米到百米,随着对信道编码调制的改进,系统通信速率从kbps、Mbps 提升到Gbps。但是真实的水下环境中信道受温度、盐度等参数的影响是多变的,而以上大部分实验都是在实验室进行的,没有到真正的河流、海洋中进行实验,这可能造成实验结果与实际应用效果有很大的区别,所以对实际的海洋探索需要进一步的研究。而且大部分UWOC系统实验的通信距离只能达到几米到几十米,达到百米的实验很少,所以解决UWOC 系统中长通信距离是目前的难题,将来需要更多的实验来解决此问题。
book=223,ebook=108
2.4 国内外研究现状对比分析
从以上国内外研究现状中可以看出,国外对UWOC 系统的研究开始比较早,而国内是近20 年开始对UWOC 系统进行大量的实验和研究,但取得了很好的研究成果。在通信速率方面,国外的水下光通信系统实验可以实现更高的通信速率,但是在通信距离方面,国内的水下光通信系统实验能够实现更远的通信距离。在接收数据的正确率方面,国内外的UWOC 系统都达到了较好的效果。在实验方面,国内外都只有少数的实验是在真实的海洋中进行的,而大部分实验室在实验室模拟的海水中进行的,这就导致了测得的数据结果和实际有一定的误差,所以未来对UWOC 系统的研究实验应该在真实的海洋中进行,使得到的book=224,ebook=109数据更加可靠。
3 水下无线光通信中的关键技术
3.1 水下无线光通信系统的信道建模
3.1.1 水的光学性质
根据MOBLEY 的理论,水的光学性质有2 种:固有光学性质和表观光学性质[12]。水的固有光学性质主要包括吸收系数和散射系数,相对于表观光学性质而言,固有光学性质对UWOC 性能的影响更大,所以研究主要集中在固有光学性质的讨论上。水下环境比较复杂,吸收和散射对光束传播影响比较严重,从而产生衰减[90]。吸收特性会使通信距离变短,散射特性会影响光的传播方向,产生多径效应,降低了信噪比,使误码率增大。图2 为海水的固有光学性质的几何结构图。
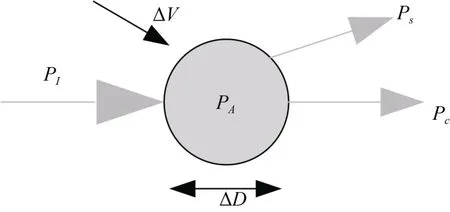
图2 海水固有光学性质的几何结构Fig. 2 Geometrical structure of the inherent optical properties of seawater
由能量守恒定律,可得[12]:
式中:λ为波长;ΔD为水箱的宽度;PI(λ)为入射光功率;PA(λ)为水的吸收光功率;PS(λ)为散射光功率;PT(λ)为出射光功率。
利用吸光度定义式,可以得到吸收系数如下[12]:
水下光吸收系数可以由纯海水吸收(aω(λ))、碎屑吸收(adet(λ))、浮游植物吸收(aphy(λ))和有色溶解有机物吸收(aCDOM(λ))4 部分表示,可得[1]:
利用散射度定义式,可以得到散射系数如下[12]:
水下光散射系数可以由纯海水散射(bω(λ))、碎屑散射(bdet(λ))、浮游植物散射(bphy(λ))3部分表示,可得[1]:
光的衰减系数 可以表示为[12]
式中,衰减系数单位为m–1。衰减系数c(λ)与海水环境的多种因素相关,包括海水盐度、浑浊度甚至浮游生物等。
表6 给出了不同海水的相关系数。由表6 可知,纯海水中的主要物质是水和无机盐,所以衰减主要是吸收导致的,散射系数比较低,可以忽略不计;在清澈的海水中,有色溶解有机物浓度比较大,主要影响光的散射;在沿海海水中,浮游植物、碎屑导致了光的吸收和散射;在浑浊的海港中,悬浮颗粒和碎屑导致了光束的严重衰减。
利用比尔–朗伯特定律可以简单的描述光在水下的衰减效应[92],其表达式如下:
式中:I0为透射光功率;c(λ)为衰减系数;d为传输距离;I为通过传输距离d后的剩余光功率。随着水域类型和水深的不同,c(λ)的值会发生变化。
由比尔–朗伯特定律还可以得到更精确地描述水下通道的功率损耗的具有2 个指数函数的模型,其表达式如下[93]:
式中:第1 个指数表示扩散长度大于衰减损耗长度的情况;第2 个指数表示扩散长度小于衰减损耗长度的情况。具体参数如表7 所示。
book=225,ebook=110
一般来说,光在水下传播时,吸收和散射会导致3 个问题:1)吸收会使光的总能量减小,这就导致通信距离受到了限制;2)散射会使光束发生扩散,使接收到光子的总数减少;3)散射会使光子到达接收端的时间不同,产生多径现象。因此,为了解决这些问题,需要对影响水下信道的因素进行大量的研究和实验。在过去的几年里,研究人员设计了很多可靠的水下无线光通信通信系统,下面是3 种主要的水下信道建模方法。
3.1.2 水下湍流信道的建模
光在水下传播时,除了受吸收和散射的影响外,还受水下湍流的影响。水下湍流是指光束通过水体时产生的随机折射率的变化[95]。水下湍流的折射率除了受到温度的影响,还与水质的种类、盐度等因素有关,而且随着地理位置的改变,水下湍流也会发生改变[96]。尽管如此,水下湍流仍然符合流体动力学方程[97]。NIKISHOV[98]提出了一种用来描述复杂的水下湍流谱,并考虑了温度、盐度、折射率等因素,能够很好的模拟光在水中传输的过程。水下折射率波动谱可以表示为[99]
式中:k是空间波数;ε是水介质的动能耗散率;η是Kolmogorov 内尺度;χT表示温度耗散率;w是由盐度和温度导致水下湍流的比值;。
由于水下环境比大气环境更加复杂,需要多个水下参数共同表示,下面是水下湍流强度的4 个湍流参数。
1)温度耗散率χT。温度变化与湍流的状态密切相关,可以用温度耗散率来表示温度的变化对水下湍流参数的影响,其表达式为[100]
式中:T表示温度值;κT是温差系数;假设在均匀的水质下,表示温度在x方向上的梯度;表示温度在y方向上的梯度;表示温度在z方向上的梯度,每个地方的温度梯度都是一样的,上式可以简化为[101]
式中:T表示温度值;κT是温差系数;表示温度在z方向上的梯度。温度耗散率的值越大,表明该水域的分层越强,还存在较强的水下湍流。
2)动能耗散率ε。在各向同性且水质均匀的情况下,单位流体质量的动能耗散率可以表示为[101]
式中:v是分子运动的粘度;∂u/∂z表示湍流速度的偏导。
3)温度和盐度导致的水下湍流比值w。当温度梯度为常数时,w可以表示为[101]
式中:α和β是常数;ΔT是水面到水下温度的差值;ΔS是水面到水下盐度的差值。
4)Kolmogorov 内尺度η。水下湍流的最小尺度就是Kolmogorov 内尺度,表达式为[98]
式中:v为运动粘性变量;ε为湍流动能耗散率。从式(14)可以看出,Kolmogorov 内尺度随着运book=226,ebook=111动粘性变量的增大而增大,随着湍流动能耗散率的增大而减小。
近年来,许多研究人员对UWOC 系统中湍流的影响进行了大量的研究,也提出了抑制水下湍流影响的模型。海洋湍流信道模型主要包括广义伽马湍流模型[102]、对数正态湍流模型[99]和多输入多输出信道湍流模型[103]。2014 年,HAMZA 等人[104]利用Rytov 方法建立了弱海洋湍流中高斯对数正态分布的衰落模型,导出了弱海洋湍流中聚焦高斯光束的轴上闪烁指数公式,并利用该公式计算了平均误码率。同年,TANG 等人[105]在沿海和港口水域中,用双伽马函数对水下光通信链路的脉冲响应进行了建模,该模型与蒙特卡罗仿真结果相吻合,并进一步研究了该模型的有效区域。2017 年,OUBEI 等人[106]对有温度梯度的水下信道进行了建模,并采用广义伽马分布的实验方法。实验结果表明,所有水下信道条件下的实测数据都具有良好的拟合性,同时指出了热均匀通道可以很好地用简单的伽马分布来描述,这是第1 个全面描述热均匀和基于梯度的水下光通道的模型。2020 年,杜迎[107]研究了在海洋各向异性湍流中,采用脉冲位置调制方式的无线光通信系统的误码率性能,并利用双伽马分布的方法对误码率进行数值计算。2021 年,贺锋涛等人[108]采用双伽马分布的海洋湍流信道传输模型进行了水下光通信系统的实验,对不同波长的水下光通信系统平均误码率进行了分析比较。JAMALI 等人[109]在UWOC 链路上使用多输入多输出空间分集技术来缓解湍流引起的衰落。在考虑吸收和散射的影响下,用解析解的方法得到了最优增益和等增益组合的精确和误码率上限表达式。
除了以上介绍的3 种常见的模型外,一些研究学者也对其它信道模型进行了研究。2016 年,LI等人[110]在各向异性湍流情况下,利用海水信道中高斯–谢尔模型得到的结论是温度波动越大,各向异性湍流的退极化效应比各向同性湍流要弱。2019年,ZOU 等人[111]在弱海洋湍流条件下,用部分相干高斯光束单输入单输出模型对影响水下无线光通信系统的平均容量进行了分析。2021 年,蒋红艳[99]对不同的海洋湍流模型进行了分析,主要包括对数正态分布、指数–对数分布、韦布尔分布、伽马–伽马分布、广义伽马分布湍流模型,并给出了它们的概率密度函数,最后在不同的湍流环境下,采用蒙特卡罗仿真方法验证了非对称剪裁光–正交频分复用和直流偏置光–正交频分复用空间分集系统的准确性。
目前,在UWOC 系统中,主要是在实验室中通过仿真设计来研究水下信道的特性,模拟的海洋环境与实际海水有一定的差异,使得到的实验数据不够充分可靠,距离工程实际应用存在差距。未来应该在真实的海洋环境下,对水下信道受湍流的影响进行全面的实验研究。
3.1.3 信道衰减模型
由于水下环境比空气环境复杂得多,光在水下传播时受到吸收和散射的影响,使得水下无线光通信的研究具有挑战性。光束在水中的衰减大约比在空气中高100 ~ 1 000 倍[112],因此,UWOC 信道建模的主要目标之一是评估整体路径衰减损耗。水下光通信的光路衰减建模主要有直视和非直视2 种模型,而这2 种模型都可以用蒙特卡洛方法得到。下面详细介绍这2 种建模方法。
1)直视模型。
直视模型的建模有2 种方法:辐射传递方程和Beer-Lambert 定律。简单的水下环境中的光衰减效应可以用Beer-Lambert 定律来表示[1]。Beer-Lambert定律是指数衰减模型,通常用来计算光路损耗[113]。SMAR[113]用Beer-Lambert 定律对直视UWOC 系统进行了研究和实验,得到了UWOC 系统在不同水质和不同的通信距离下的性能。
但是在实际水下通信中,研究者们大多数选择辐射传递方程模型。辐射传递方程是一个通用的理论模型,JARUWATANADILOK 将辐射传递方程表示为[114]
式中的所有参数都和波长有关。c是衰减系数;∇是散度算子;是位置处向方向传播的光学辐亮度;为源辐亮度;是book=227,ebook=112体积散射函数。
辐射传递方程模型有2 种常见的方法:解析解和数值解法[115]。辐射传递方程考虑了光偏振和多次散射的情况,可以更准确地模拟水下光束传播时的衰减。但是从辐射传递方程的表达式中可以看出,其是一个复杂的多变量微积分方程,找到一般的解析解形式是非常困难的,所以研究者一般采用概率法获得辐射传递方程的数值解。求解数值解的方法有蒙特卡罗法、离散纵坐标法、随机模型法和不变嵌入法[3]。由于不变嵌入法只能求解一维辐射传递方程,所以不适合用在水下无线光通信系统中。离散坐标法的编程困难,大多数人也不选择该方法[115]。基于光子轨迹概率性质的随机模型尚不成熟,所以对随机模型法采用也非常少,应用最多的是蒙特卡罗法。所以这里只对蒙特卡罗法在UWOC 系统的应用进行研究。
美国海军实验室利用蒙特卡洛模拟发表了一篇应用UWOC 通信中的使用指南,得到了研究人员的验证,而且也被许多研究水下无线光通信的学者所采用[1]。LI 等人[116]利用蒙特卡洛模型来研究UWOC 的信道容量,该模型可以灵活配置发射器、接收器和信道的各种参数,适用于物理水下光通信链路的设计。GABRIEL 等人[117]通过蒙特卡洛模拟求解辐射传递方程,提出了不同水质类型下的水下无线光通信系统的信道脉冲响应。以上的研究方法主要是针对UWOC 的信道模型,没有对通信距离作要求。HANSON[43]在几十米海水路径上用蒙特卡洛方法模拟实验,结果表明,UWOC 的通信速率可达Gbps 级。DALGLEISH 等人[118]使用蒙特卡洛方法在12.5 m 的试验箱中用500 ps 激光脉冲进行计算,获得了不同环境下的脉冲响应。除了用蒙特卡洛方法外,DING 等人[119]介绍了一种使用蒙特卡洛积分的多散射信道模型,在该模型中能用蒙特卡洛积分来求解表达式为概率密度函数的多重积分的接收端光功率。在2020 年,YUAN 等人[120]在光无线多散射信道的通信中,通过蒙特卡洛积分获得了系统的冲击响应函数。实验结果表明,对于三阶散射的情况下,相比于原始基于均匀抽样的蒙特卡洛积分而言,基于部分重要性抽样的蒙特卡洛积分模型的计算效率提高了12 倍,是广泛使用的蒙特卡洛仿真模型的5.6 倍。对于高阶散射的情况下,基于部分重要性采样的蒙特卡洛积分模型比蒙特卡洛模拟模型具有更高的计算效率。
由于直视信道建模实现简单,大多数水下无线光通信实验系统采用直视链路。但是直视模型必须是点对点的传输,而在水下环境中由于散射效应的存在,点对点是很难实现的,所以直视模型在水下无线光通信系统中有一定的局限性。
2)非直视模型。
在传统的直视链路中,信号是在点对点传输的。在传播路径上出现障碍物,会使光信号的传播受到衰减甚至阻碍。非直视模型被提出来解决这个问题。非直视模型是利用水分子反射光束来克服通信链路中的障碍[3]。与直视信道模型一样,非直视信道模型大多也是用蒙特卡洛模拟的方法。
ARNON 等人[121]应用蒙特卡洛方法研究了一种新的非直视UWOC 网络,并推导了信道的数学模型;TANG 等人[122]在考虑海水散射特性的影响下,研究了基于蒙特卡洛模拟的非直视UWOC 链路的路径损耗。实验结果表明,随着衰减长度的增加,散射光可以消除由风引起的随机表面坡度对接收信号的影响。JAGADEESH 等人[123]采用蒙特卡洛仿真方法,提出了一种评估信道特性的非直视水下无线光通信模型,利用推导的脉冲响应模型,对水下系统在不同水类型和接收视场下的性能进行了表征和模拟。结果表明,该模型为非直视UWOC信道的刻画提供了一种新的方法。ANOUS 等人[124]用水下光通信垂直链路模型分别评估了直视和非直视UWOC 的系统性能,考虑到水下环境的不均匀性,建立了简单的双层模型来精确计算链路预算。DONIEC 等人[125]介绍了一种端到端的水下光通信系统的通用模型,为后来研究水下通信模型提供了参考。
3.1.4 跨介质传输建模
在UWOC 系统中,光束需要跨越大气、海气和水体信道,不同的信道对光传输特性有不同的影响。大气信道中影响光束传播的物质有气溶胶、book=228,ebook=113大气分子、雾、雨等。由于海平面受海风的影响,使光束产生严重的折射和反射。水体信道影响光束传输的因素主要有生物颗粒,可溶有机物等。目前,国内外已经对光束在不同信道中的传输特性进行了大量研究,但是大多数都是针对单一信道进行的研究,无法满足跨介质信道建模的设计需求。
海浪建模选择的海浪频谱为 PM(Pierson-Moscowitz)谱,其具体表达式为[126]
式中:g为重力加速度;ω为角频率;是无因次量;ϑ=0.74;U为距海面19.5 m 处的风速。
海浪谱一般是频谱和方向函数的乘积,其表达式为[126]
式中:S(ω)为频谱;φ(θ)方向函数;θ是传播方向的风向角。
方向函数比频谱多个描述正弦波的传播方向,其表达式为[127]
激光在海气界面时,可以根据激光的偏振态来计算反射率和透射率,根据菲涅尔定律和斯涅尔定律可以得到海气界面总的透过率为[128]
式中:Lbd1是海气界面自身的透过率;α是反射角;β是透射角;Lbd2是经过海气界面的气泡、白浪等的透过率。
目前,水下与空中的跨介质无线通信已成为一个重要的发展领域。刘力等人[128]在不同水下传输距离及不同海面风速下,利用蒙特卡洛仿真方法研究了跨介质上行激光在传输过程中的分布与损耗特性。李聪等人[129]采用蒙特卡洛仿真方法,在晴天、层云和卷云天气条件下,分析了光在大气–海气–水体信道中的下行跨介质传输特性。司立宏等人[130]对海水–大气跨介质上行通信进行了研究,并对海浪波面对光的上行传输造成的影响进行了详细说明。CHEN 等人[131]用粗糙表面散射中基尔霍夫模型和一阶小扰动模型理论对大气–海气界面跨介质的光散射进行了讨论。王敏等人[132]研究了大气–海气–海水跨介质信道中影响激光传输的因素,并推导出了蓝绿光通过跨介质信道后的能量方程。李寅龙等人[133]研究了空中–水下跨介质信道的传输特性,并得出了在空中–水下跨介质信道的衰减主要与天气情况、海水透明度等有关的结论。张佳琳等人[134]在考虑不同近海面大气海雾能见度、不同叶绿素浓度、不同气泡浓度等真实海水条件情况下建立了蓝绿激光通过气海动态跨介质海面下行传输模型。
跨介质信道的研究还存在一些问题,比如,在垂直链路的实验中,研究者是把海水当作均匀的介质,但在垂直海水中不同深度处的盐度、叶绿素浓度等都不一样,得出的结果也会和实际有误差。目前对跨介质信道的研究大部分都是下行传输或者下行传输的研究,对上下行传输的研究较少。
3.2 光源选择
不同的光源在水下传输的距离不同,而且光路稳定性也不同。光源的选择可以决定通信距离的长短和调制带宽等方面的性能。海水对波段在450 ~550 nm 的蓝绿光吸收较少[14]。近海岸的海水更适合使用绿光作为光源,深海比较适合使用蓝光作为光源[135]。UWOC 中光源通常有3 种:发光二极管、激光二极管和超辐射激光二极管。发光二极管有成本低、生产方便、安全性好等优点,所以发光二极管是目前使用最广泛的光源,但是发光二极管存在发出的光不聚集,相干性差,发散角大等缺点,在水下传播困难。而激光二极管发光方向性好、相干性好,但是激光二极管对温度比较敏感,应用中需要加温度控制器。超辐射激光二极管是介于发光二极管和激光二极管之间的半导体光电器件,可以输出弱相干光[136],但是目前还没有对其进行可靠性的评估,还存在耦合不佳的风险[137]。所以下面只对发光二极管和激光二极管的主要性能对比,如表8 所示 。
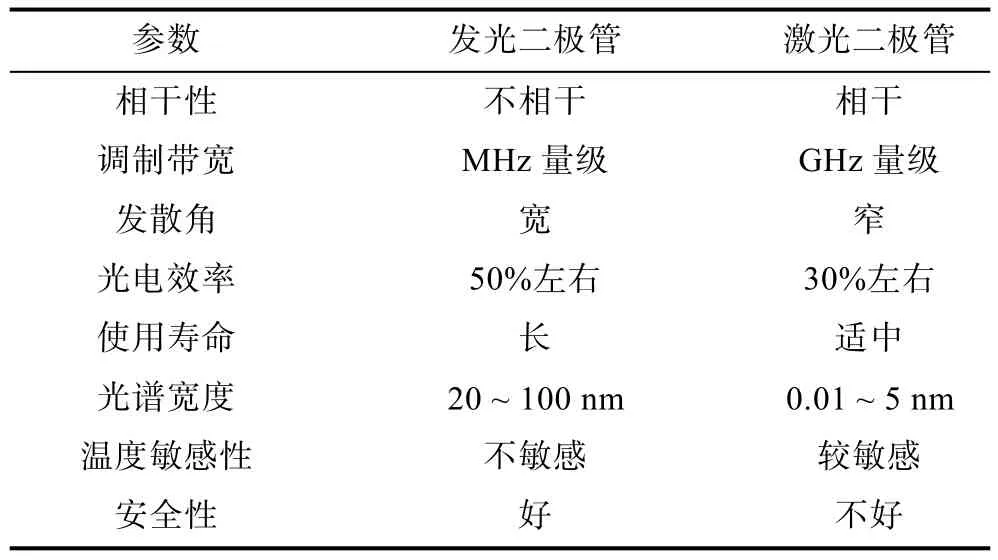
表8 发光二极管和激光二极管的主要性能对比Table 8 Comparison of main performance between LED and laser diode
book=229,ebook=114
在UWOC 系统中所用到的光源主要是波段在450 ~ 550 nm 之间的蓝绿二极管或激光二极管。随着光源选择的不同,通信距离和速率也不同,选择适当的光源可以增大通信距离。TIAN 等人[138]使用蓝色发光GaN 微型发光二极管作为光源,成功实现了数据速率为200 Mbps、通信距离为5.4 m、误码率为3×10–6的水下实验。LIU 等人[139]用实验演示了把混合红、绿、蓝激光二极管产生的白光用于水下通信系统中。实验结果表明在2.3 m 水下链路中,数据速率高达8.7 Gbps。CHAO 等人[140]在水下通信系统中使用450 nm 激光二极管作为光源。实验结果表明,在通信距离为5 m、35 m、55 m 时,数据传输速率分别达到16.6 Gbps、13.2 Gbps、6.6 Gbps。CHEN 等人[141]使用520 nm 激光二极管和32–正交幅度调制的方式,完成了净数据速率为3.31 Gbps,通信距离为 56 m 的水下实验。ARVANITAKIS 等人[142]使用由直径 60 μm 或80 μm 的6 个发光二极管串联组成的微发光二极管阵列,并在波长450 nm 下工作,实现了通信距离为4.5 m 时,数据传输速率高达3.4 Gbps。
3.3 调制技术
水下无线光通信受限于蓝绿光波段的器件,所以仍处于通信速率比较低的阶段,目前,国内外对应用在UWOC 系统中的调制技术进行了大量的研究。主要有开关键控调制、脉冲位置调制(Pulse Position Modulation,PPM)、正交幅度调制等。这几种调制方式能实现水下通信系统的高数据传输速率,但是通信距离不长。近年来,不少学者使用改进的调制方式达到了较好的效果,如极化脉冲位置调制[143]、正交幅度调制–正交频分复用[144]、极化差分脉冲位置调制[145]、二进制偏振移位键控[146]、二进制相移键控[41]等。SUI 等人[147]通过对水下光通信系统中的不同调制方式进行仿真和比较得出,PPM 更适合低功率海底系统,相移键控在带宽和误差性能方面具有最佳性能,但功率效率较低。XI 等人[148]在水下光通信种使用4-PPM调制方式。实验结果表明,使用PPM 调制方式产生的误码率几乎与开关键控调制一样,而且具有更高的频谱效率,证明了8-PPM 和16-PPM 调制方式有更高的带宽利用率。GABRIEL 等人[149]就能量和带宽效率对UWOC 系统中几种常用的调制技术作了比较,结果表明,虽然PPM 在能量效率方面是最优的,但是差分脉冲位置调制在通信性能和设备复杂度取得了优势。
3.4 编码技术
光在水下传输受到吸收和散射的影响不仅会减小通信距离,而且会使误码率增大,选择适当的编码技术能使误码率降低。在水下通信中用到的编码技术主要是卷积码和分组码[125]。卷积码包括低密度奇偶校验码和Turbo 码;分组码包括循环冗余校验码、里所码(Reed-Solomon,RS)和线性循环纠错码[150]。
在UWOC 系统中使用最多的编码方式是RS码,COX 等人[151]使用 405 nm 激光二极管以500 kbps 的通信速率将数据传输到使用(255,129)RS 码的光电二极管接收器。实验结果表明,与未编码开关键控调制系统相比,该编码方式所需的功率降低约8 dB。SIMPSON 等人[16]使用RS 编码方式,在3 m 和7.7 m 长的水箱中实现了5 Mbps 的通信速率。实验证明了当误码率为10–6时,(255,129)RS 码能使信噪比提高约6 dB,(255,223)RS 码能使信噪比提高约4 dB。COSSU 等人[19]用(2720,2550)RS-FEC 码,在3.3 m 的水箱中实现了通信速率为 58 Mbps 的水下实验,误码率从1.5×10–3降低到10–9。还有少数使用RS 码和其它编码方式结合的方法,DONIEC 等[152]在UWOC 系统中用一种使用循环冗余校验码码和RS 码结合的book=230,ebook=115两层数字编码方案来传输视频,该多层编码方案能够在水下实现低延迟的传输视频图像,但是系统比较复杂。
3.5 探测技术
水下系统中的探测器主要有PIN 光电二极管、雪崩光电二极管和光电倍增管。PIN 光电二极管主要受热噪声的影响,而雪崩光电二极管主要受散粒噪声的影响[153]。PIN 光电二极管的增益较低,而雪崩光电二极管有更高的增益,在水下系统中通信距离更长,但内部的电路比较复杂。光电倍增管有更高的灵敏度、更高的光学增益和更低的噪声水平,但它也受到高电压供应(约100 V)和高单位成本的困扰[154]。对它们的性能进行比较,如表9所示。
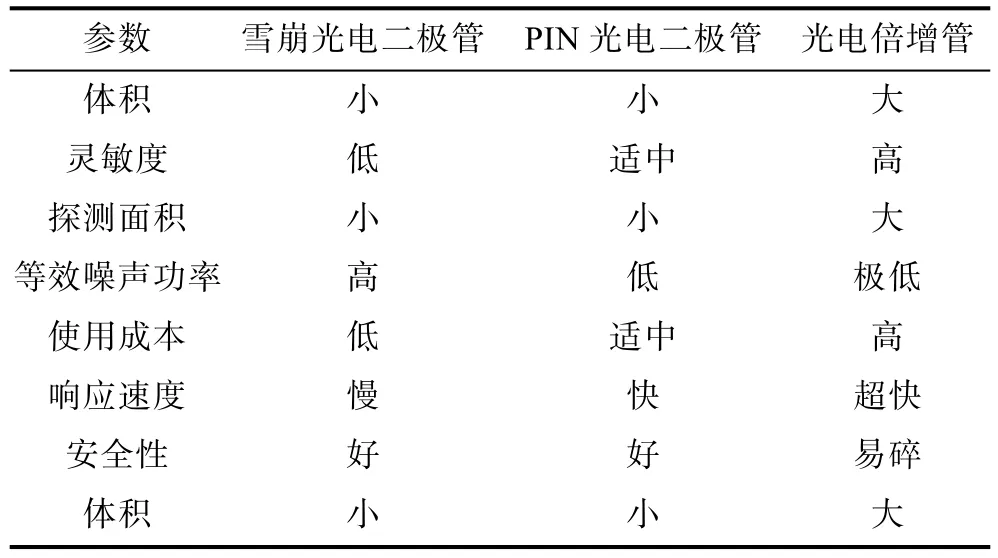
表9 探测器性能比较Table 9 A comparison of performance for different detectors
CHAO 等人[140]采用掺杂硅的PIN 光电二极管作为接收器,使PIN 光电二极管在320 ~ 1 100 nm的波长范围内工作,在450 nm 时的响应率约为0.15 A/W。而FEI 等人[155]使用掺杂硅的雪崩光电二极管作为接收器,在15 m 内实现了7.33 Gbps的数据速率。该雪崩光电二极管在400 ~ 1000 nm的波长范围内工作,在450 nm 时的响应率约为4 A/W。SUN 等人[156]采用488 nm 的蓝色激光,使用光电倍增管探测器,在4.5 m 长的水下通道中实现了传输速率为 5 Mbps 的高速视频传输。DALGLEISH 等人[118]在12.5 m 的水箱中,接收端使用光电倍增管探测器完成了500 ps 激光脉冲传播测量水下激光实验。在UWOC 系统中,除了用到上面介绍的3 种探测器外,还有研究者掺杂其它化学物质来达到更好的结果。HISKETT 等人在水下通信系统中,接收端使用硅雪崩光电二极管作为探测器。在1 m 长的水槽中用波长为450 nm的激光二极管完成了传输速率为40 Mbps 的水下实验。LI 等人[157]在水下通信系统中,接收端使用的是盖革模式下工作的单光子雪崩二极管作为探测器,该探测器可以在水下通信系统中实现长距离通信。未来可以对能够检测水下的微弱信号的探测器进行研究,高灵敏度、大视场、低噪声的探测器是未来的发展方向,这也是UWOC 系统中一个新的挑战。
3.6 水下无线光通信协议
通信协议作为通信的基础,在通信过程中扮演者非常重要的作用。尽管水下无线通信发展了几十年,但是有关UWOC 的通信协议极少,大多数都是关于水下声通信网络协议的研究。2008 年,罗琳峰等人[87]根据IrDA 物理协议设计了一套水下光通信系统,该系统建立光强与距离的关系采用的是曲线拟合的方法。实验结果验证了该系统能满足水下移动无线传感网络节点高速通信的要求。为了应对水下多变信道,同年,LI 等人[158]设计了一种用于水下通信系统的多跳网络通信协议。由于多跳网络通信协议不能适应水下环境的巨大动态变化而遭受严重的性能下降。为了应对这一挑战,DI 等人[159]提出了CARMA 通信协议,通过仿真和实验,将CARMA 与CARP、QELAR 和EFlood 这3 种路由通信协议的性能进行了比较。结果表明,CARMA获得的数据包传递比其它3 种协议高40%。CARMA传输数据包的速度也明显比 CARP、QELAR 和EFlood 快。近年来,很多研究学者在UWOC 系统中使用其它的通信协议也达到了很好的效果。2018年,KHASAWNEH 等人[160]在水下通信中使用基于压力的路由协议并利用Aqua-Sim 软件进行了仿真实验,结果表明,基于压力的路由协议可以使水下通信系统的数据传输速率有很大的提升。2019 年,韩毅[161]利用FPGA 设计了一套基于TCP/IP 网络协议的水下半双工无线光通信系统,实现了通信速率为20 Mbps,通信距离为18 m 的水下通信实验。由于TCP/IP 协议栈在UWOC 中存在一定的局限book=231,ebook=116性,兰胜林 在水下通信系统中应用Micro-ANP通信协议和 LB-AGR 路由协议,并详细介绍了Micro-ANP 通信协议的架构,用Aqua-Sim 水下仿真工具证明了该通信协议比TCP/IP 通信协议有一定的优势。2022 年,史博[163]等人对水下通信系统中的异步收发数据通信协议进行了研究,并在湖水中进行了实验。结果表明,在UWOC 系统中使用异步多节点数据通信协议可实现较低误码率的通信,为水下通信无线网络融合打下了基础。2019年,沈洁[164]在水下通信系统中使用光声融合无线传感网络MAC 协议,可以实现视频、图像等大数据信息传输。利用OMNeT++仿真软件进行仿真实验,结果表明,光声融合通信协议能提高系统吞吐量,使节点耗能更低,适用于水下无线通信环境。
4 一种水下无线光通信系统
在UWOC 系统中,为了提高接收端的光功率,西安理工大学柯熙政团队研究了一种采用广角聚焦的双层飞眼透镜光学的水下通信系统[75]。该系统采用波长为530 nm 的绿光LED 作为水下蓝绿光通信系统的发射光源,采用反光杯与聚光透镜的组合形式实现对光源的聚光和准直,同时在发射端设计了适合于该水下通信系统发射端的LED 驱动电路设计方案。接收端采用一种广视角聚焦的复眼透镜光学接收天线,根据透镜阵列的几何光学原理,利用Zemax 软件设计并仿真了复眼透镜接收系统。最后搭建了水下通信系统接收效率的实验装置,如图3 所示,分别在实验室的水缸和水管中,对系统进行不同浑浊度和不同通信距离的通信性能实验测试,通过对接收光学系的实验测量验证了该系统方案的可行性。
该系统的接收端采用一种广视角聚焦的复眼透镜光学接收天线。图4(a)为单层曲面复眼透镜示意图。由于实验室使用的探测器绝大多数为平面结构,因此对单层曲面结构的复眼透镜接收天线而言,位于边缘的微透镜对光斑的汇聚效果会有所下降。图4(b)单层曲面复眼透镜光线追迹示意图,位于复眼中央的透镜可将光束汇聚在探测器表面,但随着微透镜在球冠表面的径向移动,光束汇聚在探测器表面的效果也越来越差,在球冠边缘的透镜已无法将光线更好的汇聚在光探测器表面。
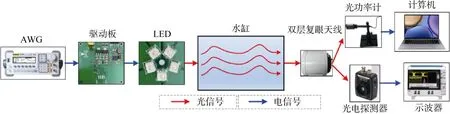
图3 接收效率的实验装置示意图[75]Fig. 3 Schematic diagram of experimental device for reception efficiency[75]
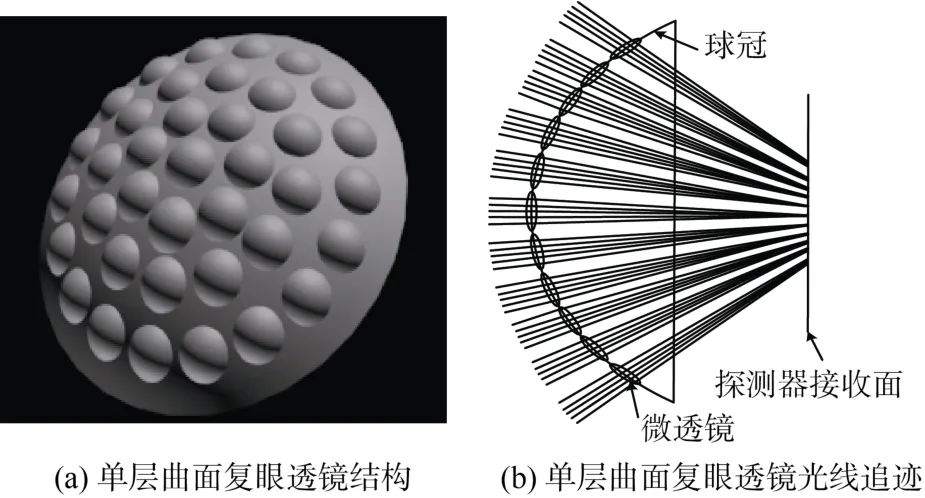
图4 单层曲面复眼透镜阵列系统示意图[75]Fig. 4 Fig. 4 Schematic diagram of single-layer curved compound eye lens array system[75]
为了提升位于曲面结构边缘位置微透镜的光束汇聚效果,使接收天线接收到的光束能进一步集中,同时也为了解决光束在汇聚过程中的离焦现象,因此在单层的基础上设计了一种双层曲面复眼透镜阵列光学系统。图5(a)为双层曲面复眼透镜阵列光学系统示意图,首先系统首层每个小曲面透镜的焦距由该透镜所在半圆面的位置决定,使得大透镜表面任意位置的小透镜都可以获得理想的光束汇聚效果,其次再通过二层的大曲面镜汇聚在探测器的表面,最终使得光信号可以一次book=232,ebook=117聚焦在探测器表面,减少边缘透镜无法聚焦而带来的光能损失。图5(b)为双层曲面复眼透镜光线追迹示意图。
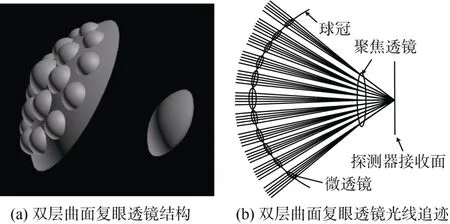
图5 双层曲面复眼透镜阵列系统示意图[75]Fig. 5 Schematic diagram of double-layer curved compound eye lens array system[75]
通过测量LED 光源的功率并根据朗伯辐射模型,可以近似地估计双层复合眼透镜入射面上的光功率。如表10 所示,随着复眼透镜表面光源入射角的增加,在功率计前针孔的输出功率随之减小,这说明双层复眼透镜光学接收天线的插入损耗随着入射角的增加而增加。

表10 双层曲面复眼镜片的入射角和插入损耗[75]Table 10 Incidence angle and insertion loss of double-layer curved compound lens[75]
图6 分别给出了在不同距离以及不同接收端的情况下,光功率计测得的光功率值,可以得出当通信距离一定时,双层复眼透镜接收天线接收到的光功率值最优,其次是单层复眼透镜接收天线,当无复眼透镜接收天线时,接收端测量到的光功率值很微弱。当接收端的接收天线保持不变时,接收端测量到的光功率会随着通信距离的增加而降低,但双层复眼透镜接收天线接收到的功率依旧高于其他2 种情况。
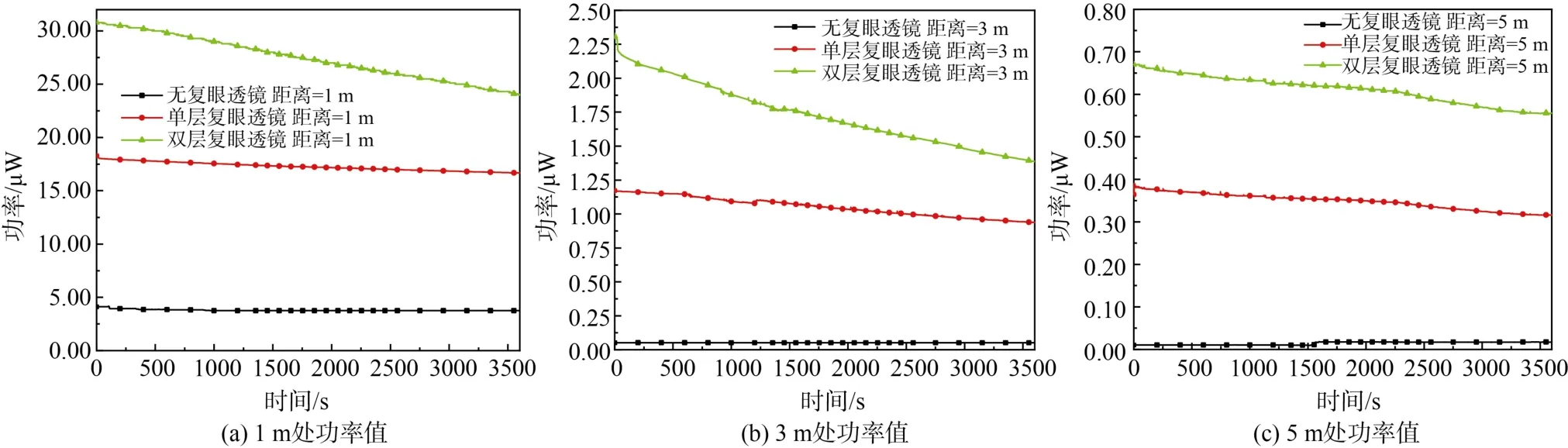
图6 1m,3m,5m 处不同接收端光功率值[75]Fig. 6 Optical power values of different receiving terminals at 1m, 3m and 5m[75]
图7 是不同传输距离时通信系统的误码率。从图7 可以看出,随着通信距离的增加,系统的误码率也随之随加。在通信距离为1 m 时的误码率为1.36×10–14,当通信距离达到3 m 之后,误码率的增幅也随之变大,当通信距离达到5 m 时,此时的误码率增大到4.58×10–12,综上说明随着传输距离的增加信号质量的衰减也在加剧。
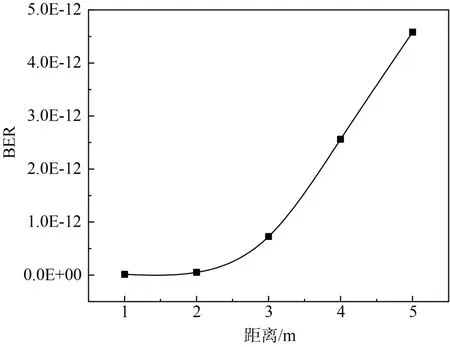
图7 不同通信距离的误码率[75]Fig. 7 Bit error rate of different communication distances[75]
运用数值仿真软件对复眼透镜的接收光功率进行理论计算,以便通过理论数据和实验数据的对比,更加直观的看出无复眼接收天线、安装单层复眼接收天线和安装双层复眼接收天线,3 种状态下接收端接收到光功率的差距。由于实验环境为静水状态,因此不考虑湍流的影响,数值计算的参数与实验设计的数据一致,P0=500 μW,Dt=38 mm,Dr=100 mm,σr2=10–10~10–13,ηt=0.82,book=233,ebook=118c(λ)=0.151,B=150 MHz,T=290,R=50 Ω,β=20°。计算结果如表11 所示,表中:Ps为理论数据;Pe为通过实验测量采集的实验数据的均值。
结合表11 数据绘制拟合理论数据与实验测量采集的实验数据的均值对比曲线图,如图13 所示,图8 中实线为光功率测量仪在1 h 内不间断测量的实验数据使拟合的曲线,虚线则是使用双层复眼透镜接收天线的接收光功率公式计算后拟合的曲线。结合图8 中实线与虚线的走势可以看出,这3 组曲线都符合指数衰减的趋势。从图中可以看出在传输距离一定时,双层复眼透镜比单层复眼透镜接收到的功率值均有提升。
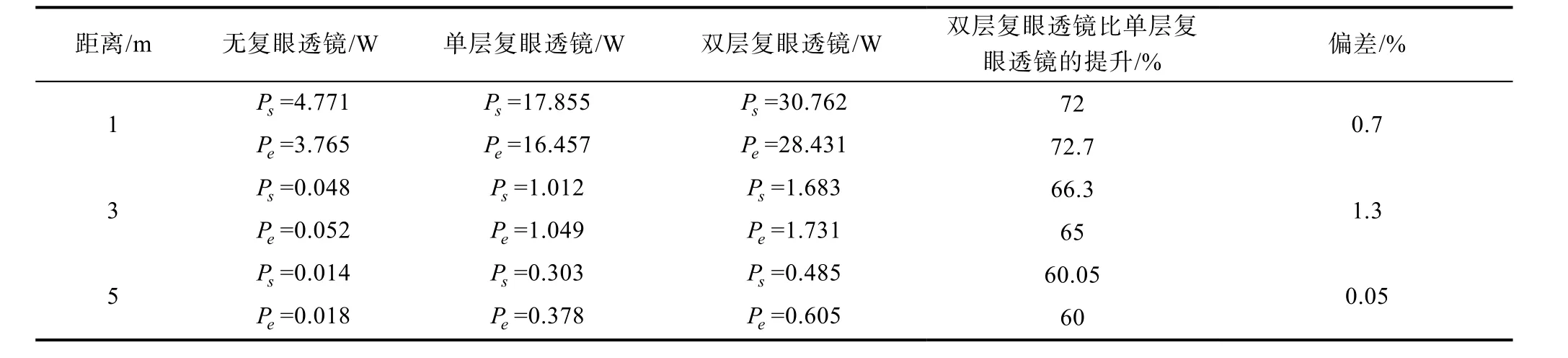
表11 理论计算数据与实验数据[75]Table 11 Theoretical calculation data and experimental data[75]
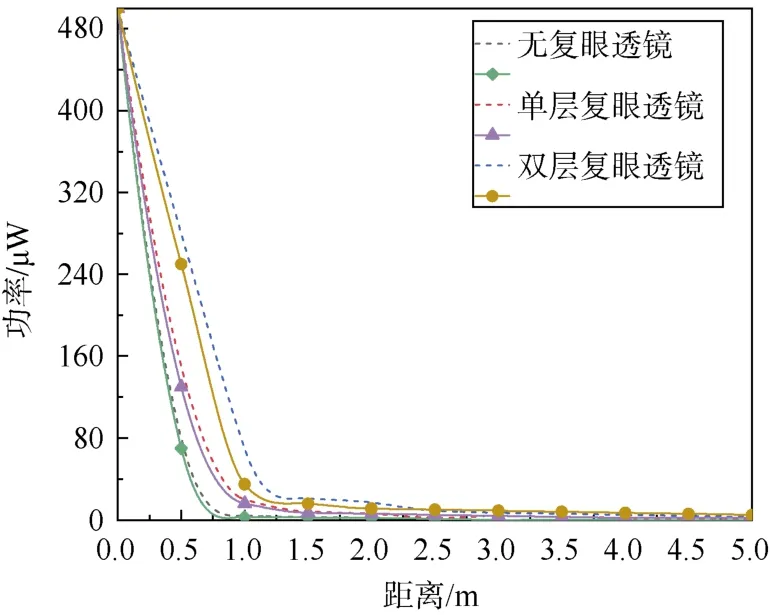
图8 实验数据曲线和理论数据曲线[75]Fig. 8 Experimental data curve and theoretical data curve[75]
实验结果表明,当链路距离为1 m、3 m 和5 m时,双层复眼系统的接收光功率比单层系统的接收光功率分别提高了72%、65%和60%。双层飞眼透镜接收天线能显著提高接收端接收到的光功率。因此,该天线结构在水下光学无线通信领域具有较强的实用性和良好的发展前景。双层复眼接收天线为增加水下光学无线通信距离提供了一种可行的解决方案。未来的研究可集中于利用信道均衡技术提高该通信系统的传输性能。
5 结束语
本文从水下无线光通信的基本理论出发,对比分析了水下光通信的优点。首先介绍了水下光通信的模型,然后从海水的光学性质进行分析,提出了影响水下传输信道的因素,主要包括吸收、散射、湍流等。接着介绍了水下光通信中用到的关键技术,包括信道建模、调制编码技术、光源选择、探测技术,对这些方面的研究进展和实验进行了总结,最后详细介绍了一种新型的水下光学系统设计模型,为水下远距离传输提供了一种可行的解决方案。依据本文的研究进展,水下无线光通信系统依旧存在不少需要改进和完善的内容:
book=234,ebook=1191)本文提到的实验大多适用于单工通信,未来可以将高带宽的发光二极管与高灵敏度的光电探测器结合起来,实现半双工或全双工的通信系统。
2)水下光通信系统的接收端大多数是单探测器接收,未来在接收端可以使用多探测器并添加多个聚焦透镜进行接收,可以增大通信距离,降低误码率[75]。
3)未来可以设计一种自适应的编码调制方案,在水下无线光通信系统中可以根据实际情况来选择合适的调制和编码方式,这样系统可以节省大量的能源,拥有更长的工作时间[8]。
4)对于跨介质传输模型,大多数垂直链路的实验都是假设海水是均匀介质,未来可以根据真实海洋情况进一步研究[128]。
5)由于在水下接收到的光信号强度很弱,而目前水下弱光检测技术尚不成熟,未来可以研究一套水下弱光信号检测系统[165]。
6)随着物联网和 6G 的发展,未来有望把UWOC 与互联网连接起来,提出新的网络协议,把水声通信、水下射频通信与水下光通信结合起来,一定能克服信道不稳定,传输速率低的问题[166]。
猜你喜欢
雷达与对抗(2022年1期)2022-03-31 05:18:20
池州学院学报(2017年3期)2017-10-16 01:38:52
现代传输(2016年3期)2017-01-15 14:22:59
电信科学(2016年11期)2016-11-23 05:07:56
电子制作(2016年19期)2016-08-24 07:49:58
电子设计工程(2015年15期)2015-02-27 12:07:15
发明与创新(2015年33期)2015-02-27 10:40:00
中国舰船研究(2015年2期)2015-02-10 06:45:49
单片机与嵌入式系统应用(2014年7期)2014-03-24 19:12:05
影像科学与光化学(2014年3期)2014-03-11 16:02:55