声学滑翔机技术现状及发展趋势
2023-04-24 09:18孙大军吕云飞师俊杰梅继丹滕婷婷兰华林靳建嘉张洪彬
数字海洋与水下攻防 2023年2期
孙大军,吕云飞,师俊杰,梅继丹,滕婷婷,兰华林,靳建嘉,张洪彬,
(1. 哈尔滨工程大学 水声技术重点实验室,黑龙江 哈尔滨 150001;2. 海洋信息获取与安全工信部重点实验室(哈尔滨工程大学)工业和信息化部,黑龙江 哈尔滨 150001;3. 哈尔滨工程大学 水声工程学院,黑龙江 哈尔滨 150001)
0 引言
声学滑翔机是一类搭载声学仪器设备的滑翔机,主要用在环境噪声测量、声学主动信号侦察、被动声信号检测与估计、目标类型判别等领域。声学滑翔机从应用平台分析,有以波浪提供动力的波浪滑翔机(Wave Glider,WG),利用重力和姿态提供动力的水下滑翔机(Underwater Glider,UG)和X-Ray、Z-Ray 为代表的大型飞翼滑翔机(X-Ray Glider,XG)。
水下滑翔机专利最早由美国人 FALLON 于1960 年提出[1],之后名为Concept Whisper 的海洋运载机器原型研制成功[2]。1989 年,美国物理海洋学家STOMMEL 提出了一种名为Slocum 的概念滑翔机,这种滑翔机内置了热交换器为设备提供动力。STOMMEL 联合工程师DOUG WEBB 开发了这款热交换器驱动的概念滑翔机,并将滑翔机命名为Joshua Slocum[3]。到2003 年,他们不仅研制了一款名为Slocum Thermal 的热动力滑翔机,还展示了一种以电池驱动的自主浮力水下滑翔机[4]。2004 年4 月,美国Alaska Native Technologies 公司开发了一款适配于Slocum 的全向水听器声学采集系统并在美国威廉王子湾完成了测试[5]。在各国逐渐重视的前提下,诸如Seaglider[6]、SeaExplorer[7]、Spray[8]和Slocum[9]等新型水下滑翔机在海洋探测领域扮演着越来越重要的角色。同时,越来越多的声学设备也开始加装在了滑翔机上,例如美国JASCO公司的OceanObserver实时高性能声学和海洋学采集与处理系统[10],美国Innovasea 公司的有线声学接收器[11]等。
WG 是在UG 的基础上发展起来的一种新型的无人航行器,其设计之初的目的是为了探测海洋鲸类的生活轨迹[12]。斯坦福大学的ROGER HINE 教授在2005 年发明了波浪滑翔机后,与加利福尼亚洛思阿图斯的研究基金会主席JOE RIZZI 一起成立了Liquid Robotics[13]。2009 年,Liquid Robotics的Red Flash 波浪滑翔机完成了夏威夷岛测试和远洋测试[14],2014 年,Liquid Robotics 与波音公司达成合作意愿,将在之后几年内,为声学反潜战提供强大的监测和通信能力[15]。

图1 水下滑翔机Fig. 1 Underwater glider

图2 波浪滑翔机Fig. 2 Wave glider

图3 X-Ray 滑翔机Fig. 3 X-Ray glider

图4 声学负载设备Fig. 4 Acoustic load equipment
声学滑翔机的快速发展为无人小平台声呐的应用提供了一个更好的工作平台,针对声学应用,表1 给出了WG、UG 和XG 的一些技术特点。滑翔机能够加装多种声学载荷,应用在不同领域,表2 给出了声学滑翔机部分加装声学载荷及应用领域。
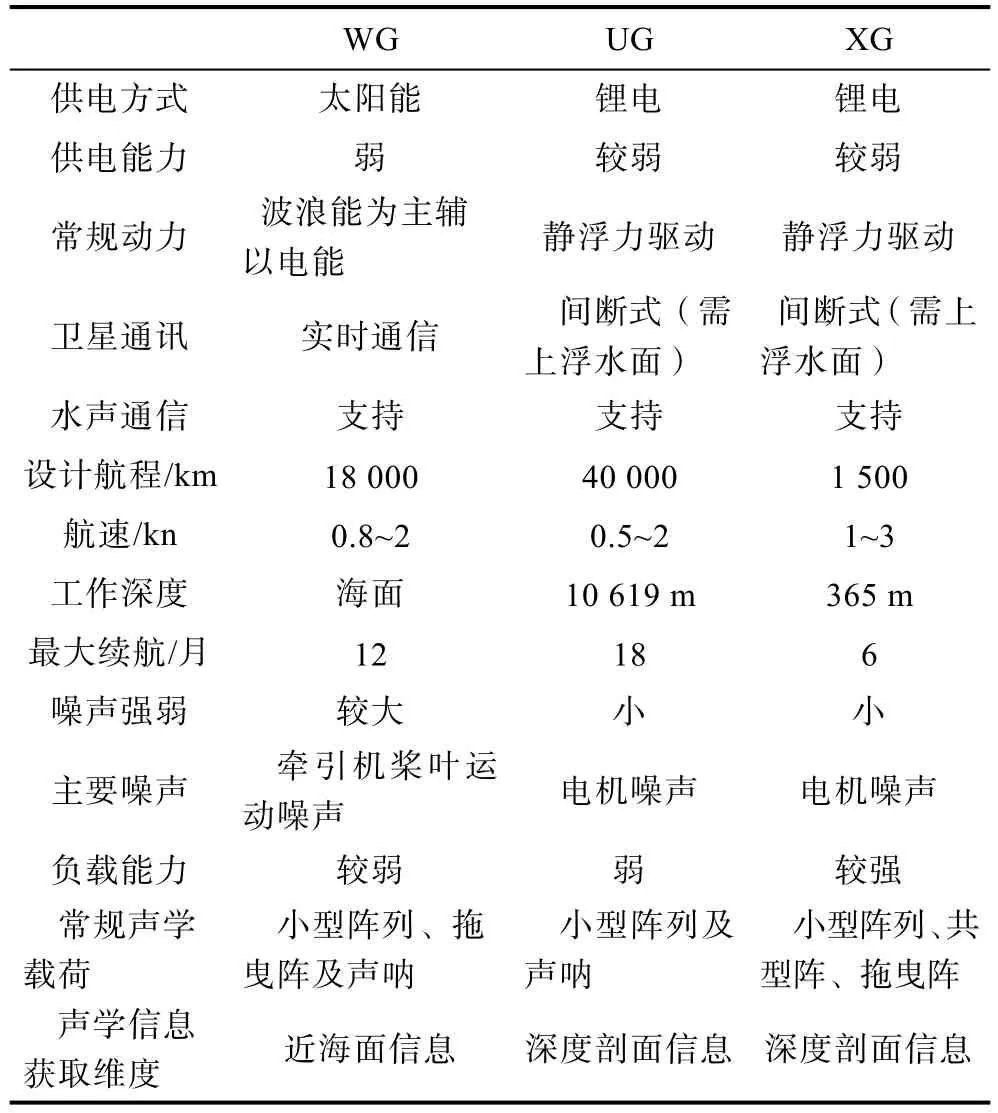
表1 WG、UG、XG 特点对比Table 1 Comparison of characteristics of WG,UG and XG

表2 声学负载及应用领域Table 2 Acoustic load and application field
1 声学滑翔机国外发展现状
国外对声学滑翔机的研究起步较早,美国、欧盟、日本、印度等国都将声学滑翔机应用在不同领域,当前技术应用正处于快速发展期。
2015 年欧盟成立欧盟全球海洋观测系统(European Component of the Global Ocean Observing System,EuroGOOS),截至目前,EuroGOOS 借助声学滑翔机开展了 EMODnet[16]、AtlantOS[17]、JERICO-DS[18]、EuroSea[19]、INTAROS[20]等项目。在2015 年9 月至2019 年间20 台滑翔机参与完成了EMODnet 项目共3 期计划,项目中有一项声学调查,声学调查的数据用来辅助欧洲海域底物图的绘制。JERICO-DS 项目中有一个将滑翔机技术与鱼类被动声学监测相结合的DEFPAM-G 实验,这一实验将水听器安装在了SDEEP04 号滑翔机上,希望可以发现鱼类声音在海洋中的深度和空间变化情况。
美国目前的综合海洋观测系统(U.S. Integrated Ocean Observing System,IOOS)存在着一个声学滑翔机网络计划,滑翔机需要完成声学接收器性能测试、鱼类声学监测、环境声场采样等任务[21]。美国海军目前运营着一支濒海战场传感滑翔机舰队(Littoral Battlespace Sensing Glider System,LBS-Glider System)[22],LBS-G 可以持久地收集海洋声场数据,这些数据可以用于反潜和情报搜集等领域。
英国国家海洋中心(National Oceanography Centre,NOC)目前基于水下无人设备有Oceanids[23]、MASSMO[24]、BRIDGES[25]等研究项目。加拿大目前拥有着NEPTUNE 和VENUS 2 个海洋观测网络[26-27],滑翔机搭载的声学设备可以传输采集到的声场数据给观测系统。搭载声学设备的滑翔机技术正广泛应用在环境与噪声测量、水下生物及目标探测、通信中继、区域警戒与反潜等领域。
1.1 环境与噪声测量
2006 年,为了协调声学滑翔机的研究,由英、法、德、意、挪威、西班牙等国发起了欧洲滑翔机观测站倡议(Everyone's Gliding Observatories,EGO),主要目的是建立一个全球范围内的滑翔机组织,实现全球范围内的长期海洋观测。迄今共布放了600 多台滑翔机完成了上百万海洋剖面的采集。2012 年,EGO 开展欧洲滑翔机群实验(European Glider Swarm EXperiment,EGSEX),8 架声学滑翔机部署在地中海西北区域,通过携带的水听器和硝酸盐分析仪,对地中海西北部的声场环境噪声和盐度进行了监测[28]。
2010 年,美国俄勒冈州立大学海洋资源研究合作研究所的Slocum 搭载着全向水听器在2 d 内记录了哈迪斯和西马塔附近的海底火山喷发的声学数据,这一实验展示了滑翔机作为长期环境监测工具的可行性[29]。
2019年, 美国海洋观测站倡议( Ocean Observatories Initiative,OOI)为了实现极地冰川调查,2 架Hugin 滑翔机以预先设定的巡航路线首次在南极洲附近的冰架下进行科学观测,他们携带的声呐将用来测量冰川底部的粗糙度和厚度等[30]。
2022 年,OOI 利用3 台滑翔机和8 个系泊设备参与了NES-LTER(Northeast U.S. Shelf Long-Term Ecological Research)项目,用以进行浮游动物声学测试和海洋哺乳动物观测[31]。
1.2 水下生物及目标探测
声学滑翔机在运行过程中具有较低的噪声,由于其较优秀的隐蔽特性,滑翔机可以对目标海域进行长时间大范围的隐蔽式数据采集和监控。许多特定用途的声学载荷被设计用来搭载到滑翔机中,以进行水下目标探测等任务,并取得了丰富的成果。
ThayerMahan 公司推出了一款可以拖曳在波浪滑翔机上的水听器阵列,这套系统由拖曳水听器阵列、导声器和阻声器组成,可以利用声学特性实时被动的监测海洋中的哺乳动物,海洋声学服务系统(Ocean Acoustical Services and Instrumentation Systems,OASIS)在2019 年斯特尔威根海岸国家海洋保护区(Stellwagen Bank National Marine Sanctuary,SBNMS)沿海实验中,布放了3 台携带该设备的波浪滑翔机,系统的剪刀图显示了同时检测几个长须鲸发声序列的潜力,这一实验验证了该拖曳阵列配合波浪滑翔机实现检测定位发声的海洋哺乳动物的可能性[32]。 图5 中的剪刀图的特点可以归因于存在鲸类发声的低频时间,这一结果表明声学滑翔机配合拖曳阵列可以对海洋目标实现探测和目标定位功能。

图5 OASIS 在SBNMS 地区获取的检测表面和剪刀图Fig. 5 Detection surface and scissors map obtained by OASIS in SBNMS area
加拿大JSK 公司发布了一款小尺寸高性能的声学阵列KraitArray(图6),这套阵列有着多达192 个的声道,可以在300 m 的深度内达到150 m长度的布放效果。2016 年,这套阵列参与了Unmanned Warrior 2016 军演,在反潜,鱼雷防御,生物和环境监测方面表现优秀[33]。SEA 在一片报道中也表示,将这款阵列放置在WG 上,能够检测和跟踪到潜艇目标 。

图6 KraitArray 拖曳阵列Fig. 6 KraitArray
1.3 通信中继
声学滑翔机可以搭载水声通信模块、GPS 模块以及无线电模块实现中继通信功能。滑翔机在正常工作的状态下,通过声通机接收其他水下设备发送的声信号,在内部处理后既可以选择利用声通机进行声通信,也可以采取上浮水面的方式利用卫星等模块实现岸基与下层设备间的交互,最终实现多台设备间的网状通信[35]。
围绕水声通信网络,美国海军在21 世纪初提出了一种名为广域海网Seaweb[36]的声学调制解调系统。此系统将声学调制解调器安装在了波浪滑翔机上,可以为水下设施、滑翔机平台和整个水声网络提供双向通信功能,能够将海洋中的固定节点、运动节点和网关节点组成一张水声通信网络。并在搭载有卫星模块的波浪滑翔机上实现水–空气介质间的电磁信号转移。这种调制解调器可以在避免与滑翔机本体干扰的前提下,实现多节点间的远距离通信。如图7。
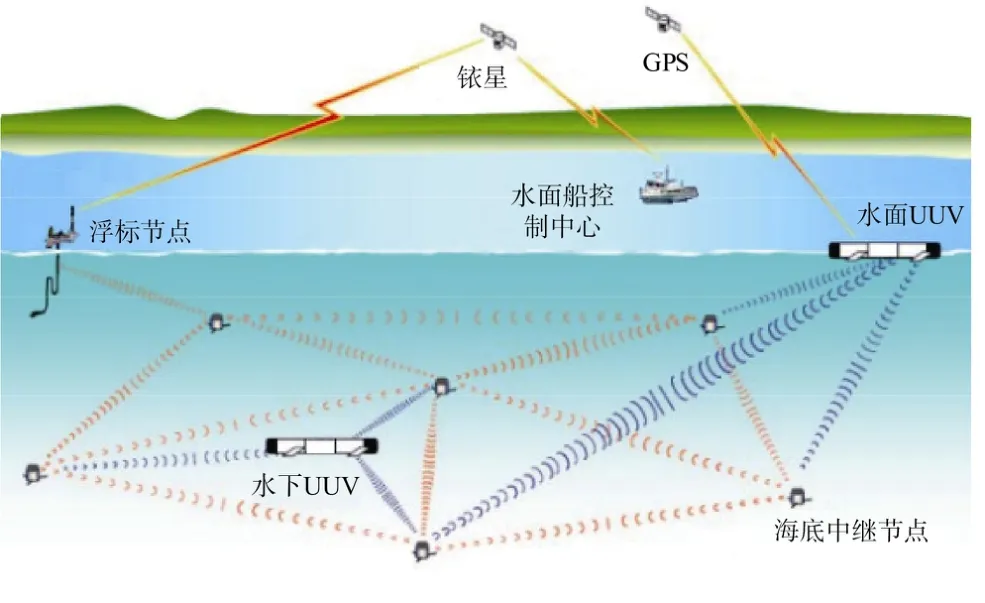
图7 Seaweb 架构Fig. 7 Architecture of seaweb
1.4 区域警戒与反潜
2016 年,英国举办了Unmanned Warrior 2016大型无人操纵战士海上联合演习,其中一种名为AutoNaut 的波浪滑翔机(图8)拖曳着一个长达25 m 的被动声学监测阵列线阵,这个线阵包含8个数字水听器,结果显示声学滑翔机可以有效的对水面水下目标实现探测和跟踪[37]。

图8 AutoNaut 波浪滑翔机Fig. 8 AutoNaut wave glider
澳大利亚海军在2016 年发布的《国防白皮书》中指出,海军为满足21 世纪战争发生的可能性,需要建立一个网络化的载体。因此澳大利亚海军计划在2035 年内将无人化的自主设备整合到海军作战中,部分滑翔机会搭载声学设备用于平台自噪声测试、静默状态下的声学监测、通信中继等任务[38]。
2 声学滑翔机国内现状
在国家计划支持下,近十年来,国内哈尔滨工程大学[39]、潜艇学院[40]、浙江大学[41]、中船715所[42]、中科院声学所[43]等单位全面开展了声学滑翔机的研究,并取得了一批成果。
潜艇学院依托天津大学“海燕”水下滑翔机,设计了一款基于FPGA+ARM 的单矢量水听器信号采集与处理系统,这套系统通过优化帧数据协议,保证了信号处理的实时可靠。2020 年,“海燕”搭载着这套单矢量水听器系统完成了南海海域的水下协调目标探测,图9 展示了测量方位和实际方位的对比图,实验结果显示这套声学系统能够有效实现水下目标的探测定位[40]。
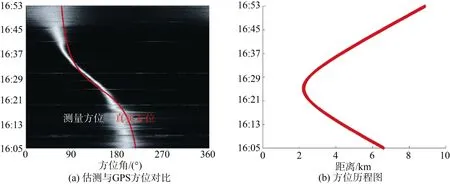
图9 噪声方位估计与GPS 推算方位对比及距离历程Fig. 9 Comparison between noise bearing estimation and GPS dead reckoning and range history
中船715 所基于常规阵列设计了一款小型的ADCP 设备,这套设备基于D 类功放设计,发射机可以在450 kHz~550 kHz 的带宽内稳定运行,具有小型化抗干扰的特点。未来若适配滑翔机可以在海洋科学探测等领域发挥重要作用[42]。
2019 年12 月,中科院沈自所在东印度洋海域布放了12 台海翼号水下滑翔机,这次组网集群实验累计工作时长达到51 d,对近3 500 个海洋剖面进行了有效地科学观测并采集了大量的声场数据[44]。
中科院声学所利用东印度洋实验中声学滑翔机采集到的声场数据对声源进行测距和定深估计,误差结果均在5%以内。这一结果证明滑翔机配备声学载荷可以完成对水声信号的同步观测,该实验也为实现声源的三维定位和同步观测打下了基础[43]。

图10 多声学波浪滑翔机协同探测Fig. 10 Geometric distribution of positioning accuracy of three base stations
哈尔滨工程大学基于波浪滑翔机研发了拖曳式的小体积立体阵探测系统。海试中3 台声学波浪滑翔机协同探测实现了目标的探测预定位[39],且具有优秀的准确度。
3 声学滑翔机关键技术
3.1 声学设备搭载技术
海洋中的滑翔机受自身体积和功耗等因素的制约,声学负载的搭载能力有限。滑翔机通常采用模块化的设计方式,根据所执行的不同任务在电子舱内搭载不同的有效载荷。
水下滑翔机可以搭载不同声学载荷,当进行海洋环境噪声观测时,为了在不影响滑翔机正常运行的前提下减小噪声,声学设备通常会放置在滑翔机头部的屏蔽导流罩内,如图11(a)。当加装矢量水听器进行目标探测和方位估计时,为减小滑翔机机体和噪声的影响,可以将声学设备以延伸的方式加装在设备的头部,如图11(b)。当需要加装小尺度体积阵进行目标探测任务时,为了获得更大的孔径,减小滑翔机机体的影响,通常会将声学设备搭载到滑翔机的翼板上,如图11(c)。为了使滑翔机可以无障碍地与水面水下其他设备信息传输,声学通信设备会加装在滑翔机的顶部,如图11(d)。
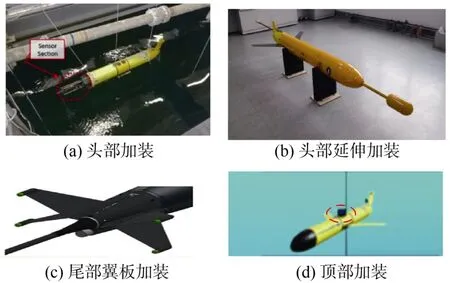
图11 UG 声学负载搭载方式Fig. 11 Acoustic load carrying mode of UG
波浪滑翔机主要由水面艇、挂缆、水下驱动单元3 部分组成,WG 在运行过程中主要存在着牵引机产生的机械噪声和设备在水中行进过程中产生的流体噪声。对于对噪声不特别敏感且工作深度可以较浅的声学负载,一般集成在水面艇或牵引机上,如声通机和定位仪 ;对噪声敏感且要求一定深度工作的声学设备,通常会采用长缆拖曳的搭载方式,将声学设备置于远离牵引机的拖体上,配以减振缆相连,减小波浪滑翔机运动噪声及状态起伏对声学设备的影响。如图12。

图12 WG 声学负载搭载方式Fig. 12 Acoustic load carrying mode of WG
飞翼式滑翔机通常体型较大,X-Ray 滑翔机的翼展可以达到20 英尺。XG 内部所能利用的空间也远大于 UG 和 WG,X-Ray 的内部总容积有1 000 L,具有强大的负载能力[46]。除内部布放常规声学载荷外,XG 可以在表面布放共形阵。Z-Ray在结构上采用了小型水射流的方式保持精确的姿态控制,这一结构可以使前沿水听器阵列孔径定向于特定方向;在Z-Ray 的机头、机尾和两侧翼板位置,还可以安装大带宽的矢量水听器[47]。如图13。
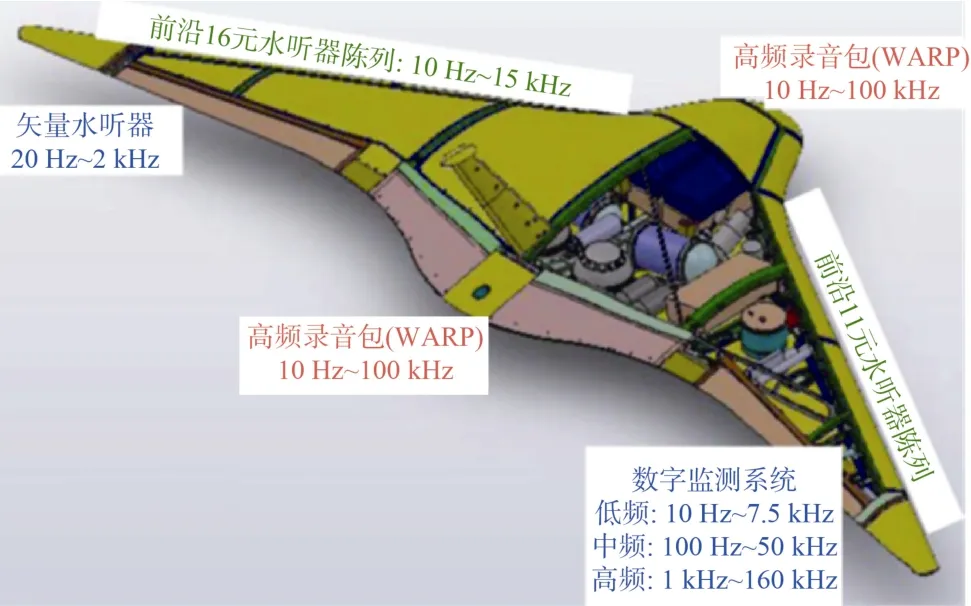
图13 XG 声学负载搭载方式Fig. 13 Acoustic load carrying mode of XG
3.2 噪声控制技术
声学滑翔机相较其他海洋设备,具有更低的噪声谱级,更小的声学截面积,几乎没有尾部痕迹。当电机处于停止状态时,滑翔机的自噪声谱级与潜标采集到的海洋噪声谱级类似。具有优秀的水下隐蔽能力,不易被雷达和声呐设备探测到 。
滑翔机在工作时的噪声源有水动力噪声、电机和螺旋桨工作时的螺旋桨噪声和机械噪声。在剖面滑翔的过程中,方向调节引起的电磁抱闸振动噪声是制约声学设备性能的主要噪声影响因素。通过优化转向部件和控制策略降低转向系统噪声的量级;在硬件设计时滑翔机内部供电采用隔离式供电模块,对不同的任务模块分割地层处理来降低电磁干扰;在电子舱内壁安放吸声材料阻隔声传播路径;优化动力系统和声学系统的工作模式,在电机工作的高噪声情境下关闭声学系统的正常运行等噪声控制策略均有利于降低噪声对声学滑翔机的干扰。通过CFD 仿真,获取滑翔机周围的流速信息,找到水听器的最佳安装位置,可以降低流体噪声和滑翔机机械噪声。通过动力学模型仿真,优化滑翔机的控制参数,通过降低滑翔速度可以降低水动力噪声[49-50]。
采用振源控制技术降低振源自身的振动,或使用阻尼材料可以将振动产生的动能和声能转化为热能,均能显著减少因滑翔机振动带来的噪声干扰。通过测量滑翔机不同工作状态下的辐射噪声,根据噪声分布特性,优化平台;在材料上结合滑翔机外部的辐射声场特性,通过设计低噪声的滑翔机耐压外壳、小振动量的动力和漂浮系统可以减少来自机械和结构上的噪声影响[51]。
图14 仿真了UG 的自噪声谱和机械噪声的影响。图14(a)展示了在1 kn 航速下,UG 周围流场的分布情况。图14(b)显示UG 的噪声谱级随着频率呈现递减趋势,且在150 Hz 之后噪声谱级均小于零海况状态下的环境噪声。图14(c)展示了不同控制策略下的噪声谱,设备的主要噪声源出现在俯仰姿态条件和舵机转向时,因此需要重点关注由姿态和方向调节所产生的机械噪声[52]。
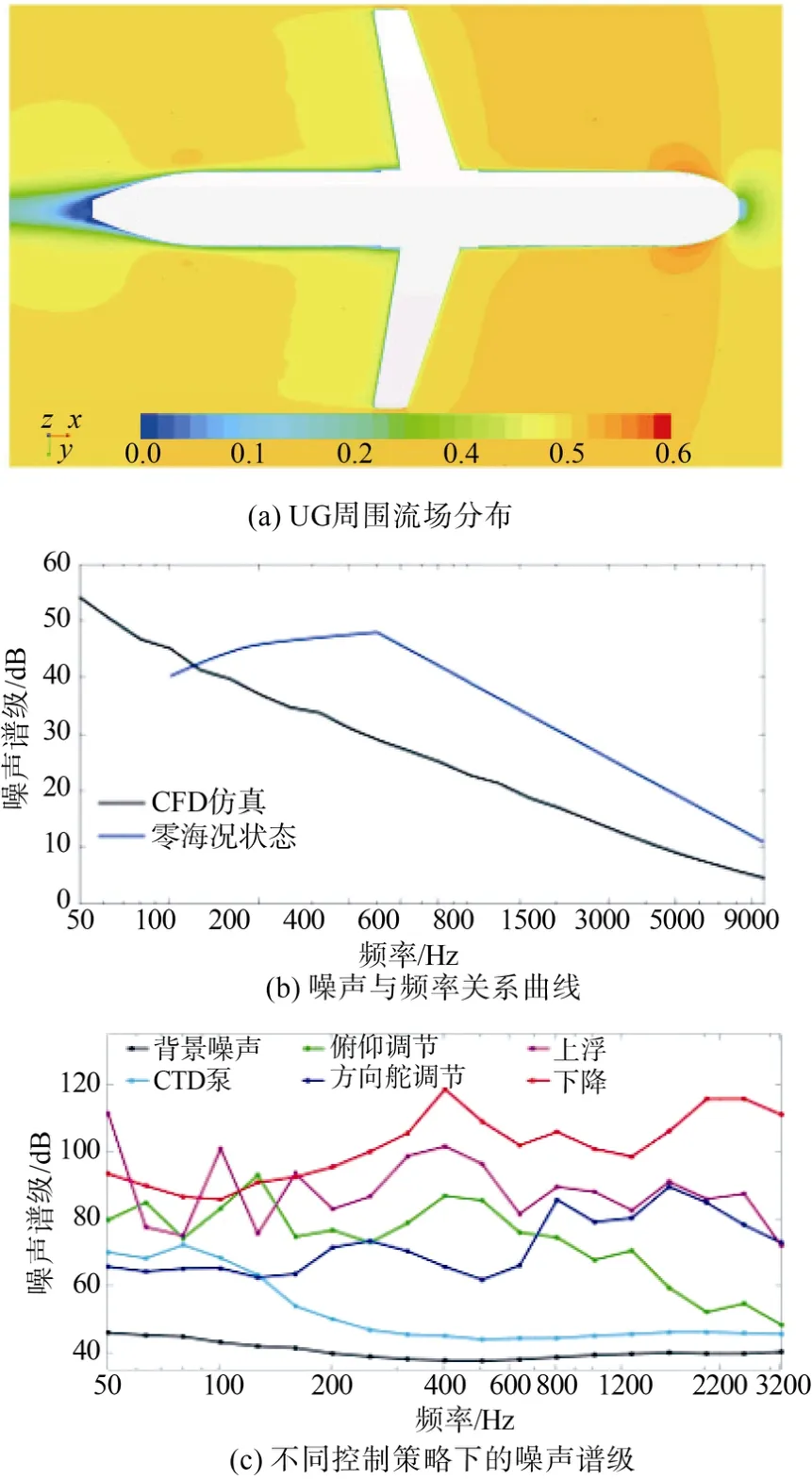
图14 UG 噪声分布和噪声控制技术Fig. 14 Noise distribution and noise control technology of UG
WG、XG 的减振降噪策略和UG 相似。但针对WG 搭载的拖曳式声学拖体,如图15 所示,还可以通过增加减振段的方式减振降噪。一方面减振缆降低了声学拖体的振动情况;另一方面拖曳式的搭载方式使声学拖体远离船体,降低了船体噪声对声学设备的干扰[53]。
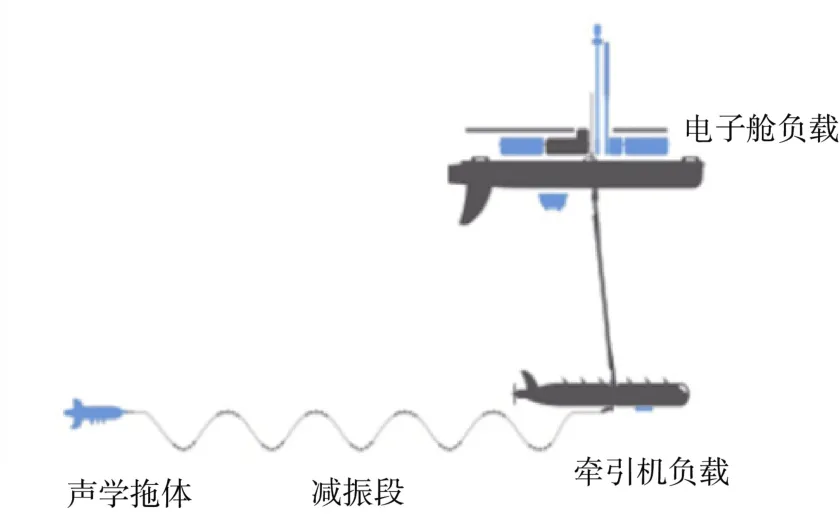
图15 WG 采用减振段减振降噪示意图Fig. 15 Schematic diagram of vibration reduction and noise reduction by WG
3.3 小尺度阵列信号处理技术
声学滑翔机搭载的声学基阵多为小型基阵,为获得低频测向能力及高增益,开展了针对性的信号处理方法研究。
在滑翔机上加装单矢量水听器,体积小,在低频/甚低频段能够实现信号的探测与方位估计。方位估计较早采用声能流方位估计法,随着研究深入陆续开展了MVDR 算法、子空间算法等方位估计方法。
声学滑翔机的声学阵列较小,难以直接拿到空间增益,为提高方位估计精度和目标探测性能,水下滑翔机加装了矢量水听器,为了提高方位分辨能力,声学滑翔机采用合成孔径技术。合成孔径技术利用在某方向移动的小孔径基阵模拟大孔径基阵,水听器接收到回波后,经相干叠加处理,可以获取到分辨率更高的方位信息。从图16 看出采用合成孔径技术后波束宽度变窄,小尺度阵下实现了高精度目标方位估计[54]。
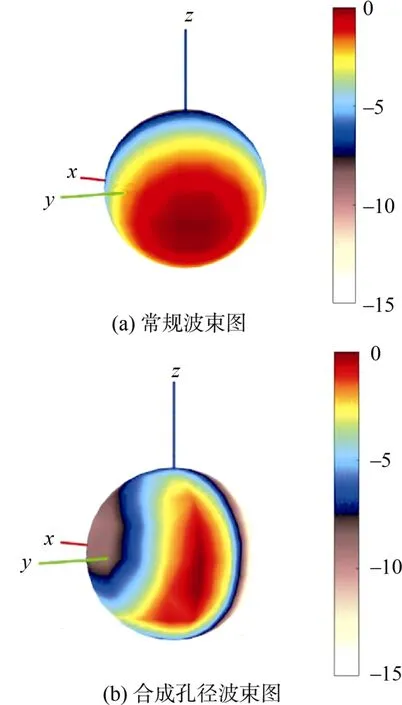
图16 常规波束图与合成孔径波束图Fig. 16 Conventional beam pattern and synthetic aperture beam pattern
3.4 组网协同技术
组网技术就是将多台职责不同的水下设备组成一个协作团队,每台设备负责1 个或多个任务。根据每台设备所承担的任务搭载不同功能的传感器和载荷。海洋环境下,声学滑翔机机动能力弱,通信能力和续航能力有限,为了提高滑翔机的工作效率,需要对滑翔机组网协同。声学滑翔机组网范围内的每台设备相当于1 个节点,组网设备具有无线通信和中继转发的功能。
相较于单机探测,将搭载不同载荷的滑翔机组合起来,构成海洋探测网络,可以有效扩大海洋探测的深度和广度。实现由单点观测到点对点的全方位立体观测。合理安排组网内每台设备的巡航路径,可以有效提高观测网的运行效率。
基于设备组网集群,哈尔滨工程大学提出了一种多独立切换拓扑网络。将整个集群网络拆分为多个子网,如图17 所示,当主网与某个子网的主控通信失败时,系统会随机指派新的子网主控,以此来保证集群系统的一致性[55]。
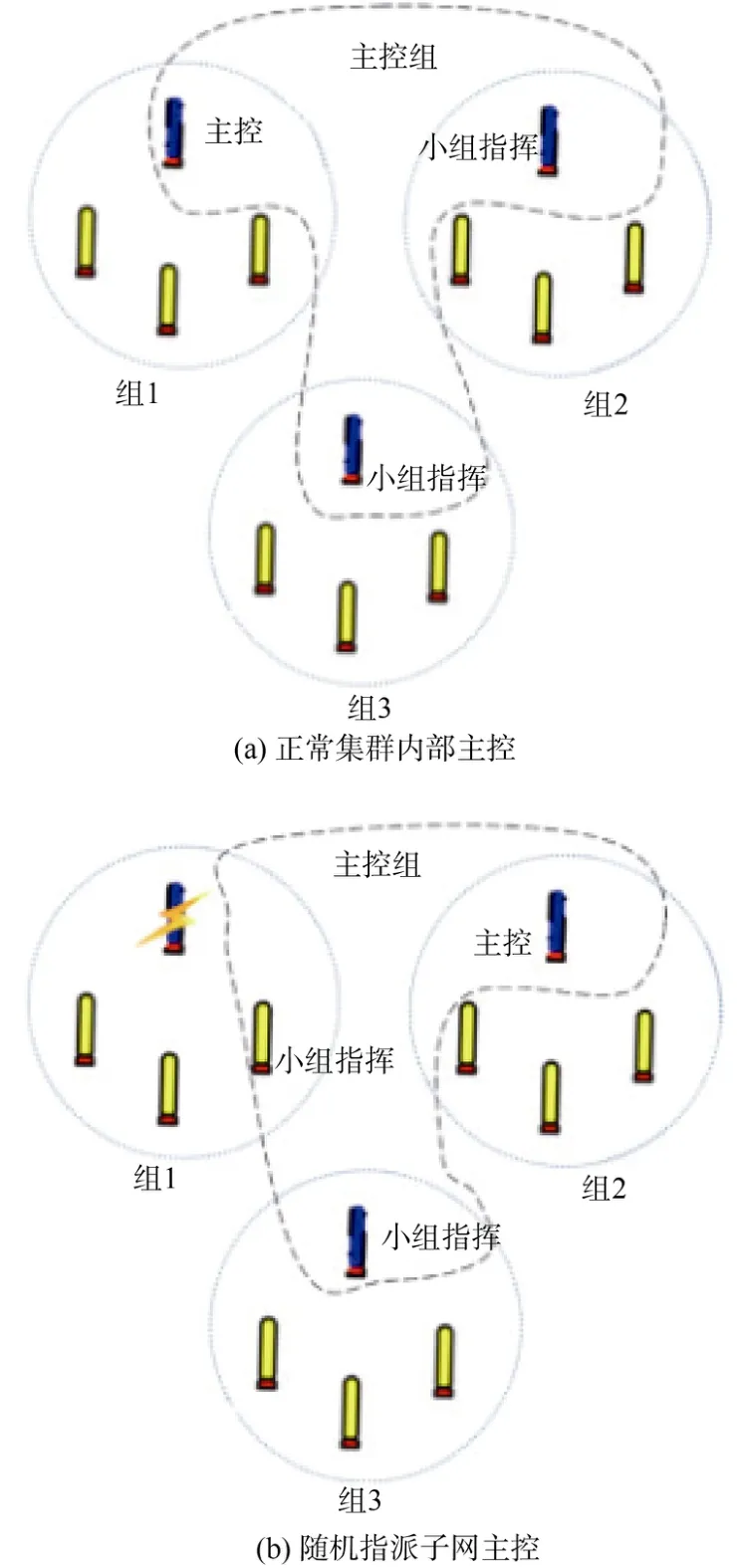
图17 多独立拓扑结构水下集群网络Fig. 17 Underwater cluster network of multi independent topology
4 声学滑翔机未来发展趋势
4.1 声学滑翔机应用模式拓展
声学滑翔机作为一种新型的无人装备,目前在海洋环境与噪声测量、目标探测、中继通信及区域警戒等部分场合开展了应用,但当前声学滑翔机使命与功能较为单一,以辅助应用为主,没有充分发挥其特点,各种形式的声学滑翔机仍处于快速发展期。
声学滑翔机具有低成本、无人化、可长期存在、适应恶劣海况等特点,适合在深远海多节点分布式协同应用。未来亟待开展多节点分布式协同模式、效能及应用区域等方面的研究,不断拓展声学滑翔机信息获取的维度、执行任务的深度和广度,使之成为海洋环境监测或远程预警的中坚力量。
4.2 声学载荷专用化
目前声学滑翔机加装的声学载荷大部分沿用有人平台的声学载荷,没有针对滑翔机的特点进行设计。声学载荷存在体积大、功耗高和自主信息处理能力弱等问题,进而导致声学滑翔机工作和生存时间短,信息处理需要大量专业技术人员,严重限制了声学滑翔机的批量应用。
声学滑翔机体积小,提供给载荷的重量、体积、供电能力有限,需要开展传感器的小型化、低功耗技术研究,针对不同应用和不同滑翔机开发专用的声学载荷模块。滑翔机自身成本较低,适合批量应用,加装的传感器也应降低成本。滑翔机长时间自主工作,需要传感器具有很高的可靠性。
声学滑翔机需要不依赖于岸基的自主任务执行能力和信息获取能力,减少人工介入。声学载荷需要发展人工智能技术、深度学习技术及大数据处理等技术。信息获取、目标探测与状态估计、目标识别、任务执行、多节点协同信息处理的自主化是未来的发展趋势。
4.3 声学滑翔机组网协同
单节点声学滑翔机信息获取在时间、空间、频率等方面能力有限,滑翔机机动能力弱,难以实现大范围的信息获取、远距离的目标探测与目标的持续跟踪。声学波翔机组网协同是发展趋势,亟需拓展声学滑翔机获取信息的维度,扩大任务执行的深度和广度。
声学滑翔机目前虽然在一定海域投放数量较多,但多为单节点独立工作,缺少节点间的声学信息协同。为提高声学滑翔机目标探测距离、探测效率及目标持续跟踪能力,需要发展节点间信号级、信息级的信息传输与处理技术,多源信息融合技术,将时间上、空间上不连续的信息片段进行整合。
研究不同类型声学滑翔机协同技术,可以拓展信息获取的维度,提升探测和通信的效率及实时性。声学波浪滑翔机获取水下近海面声学信息,声学水下滑翔机获取全海深声学信息,融合二者获取的信息,实现协同探测,可以达到更高的探测能力。
以任务为驱动,全面分析环境监测与目标探测应用需求,基于现代信息技术及人工智能技术,研究声学滑翔机的节点分布优化技术、网络重构技术,能够根据任务需求及环境特点自主的调整组网方式、航行路径规划及作业模式等,使之具备独立自主的作业能力。
4.4 多系统信息融合
海洋信息获取及探测预警等未来必将呈现网络化、多系统联合化工作,声学滑翔机便是其中一环,但声学滑翔机能够完成的任务有限,因此需要同其它系统联合应用。
声学滑翔机同其它无人系统及有人系统联合时,根据任务需求和系统特点,完成任务的不同阶段工作。研究多系统信息共享技术,异构多源信息融合技术,人机融合智能决策技术,可以提高信息获取的质量及预警效能,更高效地执行相应任务。
5 结束语
本文对海洋中的声学滑翔机的应用、发展现状、关键技术及未来发展趋势进行了分析。声学滑翔机处于初步发展阶段,随着相关技术的发展,会有更广泛的应用领域。
猜你喜欢
电声技术(2022年3期)2022-04-28
家庭影院技术(2020年6期)2020-07-27
应用科技(2020年1期)2020-06-18
知识就是力量(2019年7期)2019-07-01
家庭影院技术(2019年1期)2019-01-21
家庭影院技术(2018年11期)2019-01-21
军事文摘(2018年24期)2018-12-26
小学科学(学生版)(2018年12期)2018-12-19
家庭影院技术(2018年10期)2018-11-02
声学技术(2014年1期)2014-06-21