
太阳立体探测任务的控制系统设计
2023-04-19 03:21胡少春陈守磊
空间控制技术与应用 2023年1期
胡少春, 林 波, 陈守磊
1. 北京控制工程研究所, 北京 100094 2. 空间智能控制技术重点实验室, 北京 100094
0 引 言
日冕主要由高速运动的自由电子、质子以及高度电离的离子组成,它是太阳大气的最外层[1],会引发日冕物质抛射现象(coronal mass ejection,CME)和共转相互作用区(corotating interaction region,CIR)等.CME和CIR是太阳大气中频繁发生的爆发现象,是引发磁暴的两种主要驱动源,将会使得地球空间环境发生剧烈变化,严重干扰航天器的正常运行.通过观测日冕,可以提前预报地球与日地空间的灾害天气,减少或避免日冕活动对空间探测任务造成的损失,并对日冕活动与CME的成因等进行更深入的研究[1].
日地平动点是太阳观测的理想位置,如图1所示,其中L1、L2、L3为不稳定的共线平动点,L4、L5为稳定的三角平动点,这5个点均位于黄道面内.目前,具有代表性的日冕观测器主要有太阳和日球观测台(solar and heliospheric observatory,SOHO)和日地关系观测台(solar terrestrial relations observatory,STEREO).SOHO位于日地L1点,沿日地连线方向获取正对地球的太阳活动信息[2];STEREO实现了对太阳全球面活动的立体全天候监测.STEREO的其中一颗卫星曾经经过L5点,该卫星收集的数据显示,位于L5的常驻探测器可将CME影响时间的不确定性从10 h缩减至6 h以内.由于太阳在赤道处的自转周期约25天,位于L5的探测器要比位于L1和地球轨道的探测器提前4到5天观测到太阳探测区域,可以大幅度提前灾害天气的预报时间[3].因此,近些年国外提出了运行于日地L5点的太阳对地影响观测台(Earth-affecting solar causes observatory,EASCO)和日地空间自然威胁探测任务(investigation of solar-terrestrial associated natural threat,INSTANT)等.
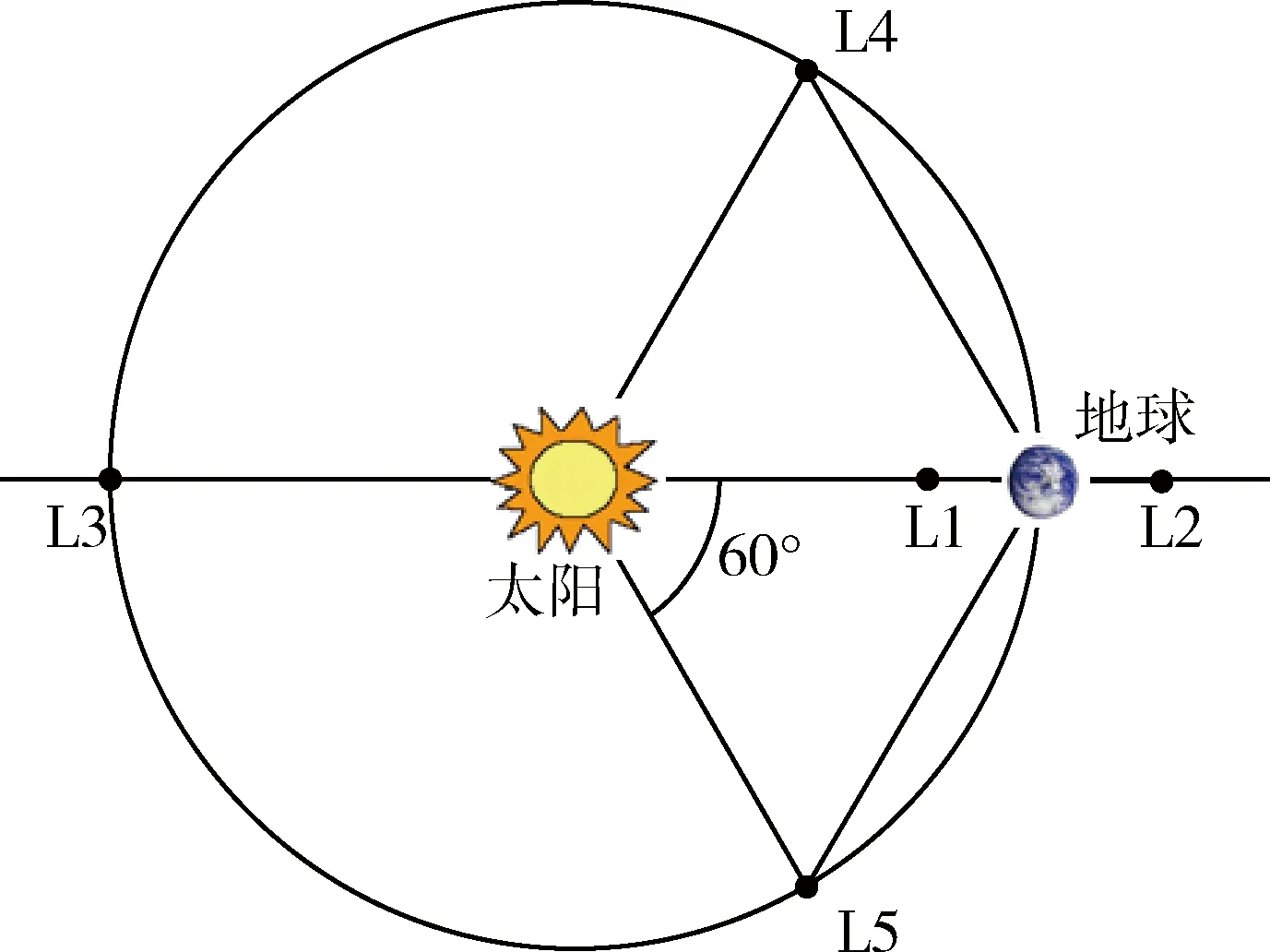
图1 日地平动点(L1~L5)位置示意图Fig.1 The positions of libration points in the Sun-Earth system
1 国外发展现状
1.1 STEREO任务
NASA于2006年10月26日发射了STEREO,该观测任务由STEREO-A星和STEREO-B星组成.STEREO-A于2006年12月15日进入0.95×0.97AU,倾角0.12°,轨道周期为346天的太阳环绕轨道;STEREO-B于2007年1月21日进入0.99×1.09AU,倾角0.03°,轨道周期为388天的太阳环绕轨道[4-5].两颗星分别以每年约22°的漂移率逐渐远离地球,如图2所示,实现了太阳的全方位立体观测.
两颗卫星均为三轴稳定姿态,对日定向,具有固定太阳翼和可调的高增益天线.控制分系统由星敏感器、惯性测量单元(IMU)、太阳导行镜、数字太阳敏感器和动量轮组成[6].星敏感器用于确定卫星姿态;数字太阳敏感器由5个独立的探头组成,用于测量太阳的位置;IMU提供卫星的角速度信息;太阳导行镜用于确定卫星相对于太阳的姿态;4个金字塔型安装的动量轮用于实现姿态控制.推进分系统由12个单组元肼推力器组成,实现轨道机动与角动量卸载.探测器为零动量系统,主要的干扰力矩来自太阳光压,大约30天卸载一次.除了姿态与轨道机动外,STEREO一直保持+X轴指向太阳.
卫星搭载的日地关系日冕和日球探测器(Sun Earth connection coronal and heliospheric investigation,SECCHI)中的日心成像设备(Sun-centered imaging package,SCIP)俯仰和偏航轴指向精度为7.25″(3σ),稳定度为1.53″/15 s(1σ)[6].
1.2 EASCO计划
由于日地L4和L5点是观测太阳耀斑和日冕物质抛射的理想位置,因此近年来NASA开展了太阳对地影响观测台EASCO的论证工作.探测器位于日地L5点,主要用于观测CME和CIR,它克服了SOHO任务观测方向与日地连线一致,只适合探测地球方向的日冕物质抛射以及STEREO任务不能像SOHO探测器那样在同一方位观测太阳的长期变化问题[7-8].
探测器采用三轴稳定姿态,配备星敏和导行镜,推进分系统由两台电推力器和12台单组元肼推力器组成[7],电推力器用于大的轨道机动和轨道修正,单组元推力器用于角动量卸载,大约2个月卸载一次.
1.3 INSTANT计划
INSTANT太阳探测计划是由欧空局和中国科学院共同提出的,主要用于研究CME的爆发时间与机理以及对地球与近地空间环境的影响.探测器基于星上自主项目(project for on-board autonomy,PROBA)微卫星平台,将在围绕日地L5点幅值小于0.1AU的Halo轨道上进行稳定的太阳观测.探测器为三轴稳定姿态,指向精度20".整个探测器系统由探测器、推进舱、发射适配器等组成,推进舱在完成轨道转移和Halo轨道入轨后实现分离[9].轨道转移、巡航段的姿态控制、L5点位置保持以及角动量卸载等均采用电推进实现.
2 国内发展现状
我国目前比较有代表性的太阳探测任务主要有:处于系统论证阶段的“夸父”计划与太阳极轨射电成像望远镜计划(solar polar orbit radio telescope,SPORT),处于工程实施阶段的先进天基太阳天文台计划(advanced space-based solar observatory,ASOS),以及已经成功发射的“羲和号”太阳探测科学技术试验卫星.这些任务中,大多采用地球极轨而非观测位置更好的L4/L5点,无法实现太阳耀斑和日冕物质抛射的全方位立体探测.
此外,国内也有学者研究了L4/L5点太阳探测器的轨道转移方式和代价,并给出了探测器的总体方案设想[10].
2.1 夸父计划
“夸父”计划,即空间风暴、极光和空间天气探测计划,由一颗位于日地L1点的KuaFu-A卫星和两颗沿地球大椭圆极轨共轭飞行的KuaFu-B1、KuaFu-B2卫星组成,如图3所示,用于监测由于太阳活动而导致的日地空间环境变化全过程[11-12],在很大范围内实现太阳日冕物质抛射的不间断观测.
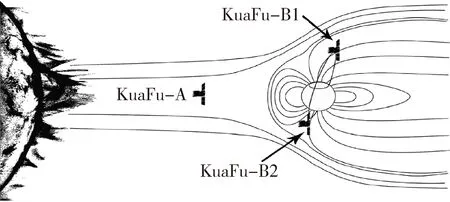
图3 “夸父”任务轨道示意图Fig.3 Heuristic illustration of the KuaFu mission
2.2 SPORT计划
SPORT计划是从太阳极轨俯视黄道面行星际太阳风的成像观测计划.太阳极轨轨道倾角为89.96°,近日点高度0.52AU,远日点高度5.4AU,轨道周期约5年[13-14],圆锥视场大于34°.它拟利用射电成像仪和日球层宽视场光学日冕仪,对行星际中传播的日冕抛射物质(ICME)从日冕到接近1AU的区间进行连续观测,研究其在传播路径上的演化、发展过程及其规律,并对其可能对地球空间产生的影响进行预警和预报[15].
2.3 ASO-S计划
ASO-S计划是我国第一个获得批准立项的太阳空间探测卫星任务,将在高度720 km、倾角98.2°的太阳同步轨道上观测太阳磁场、太阳耀斑和日冕物质抛射,用于研究三者的起源以及可能存在的关系.卫星采用三轴稳定姿态控制方式,平台的姿态指向精度为0.01°,稳定度为0.000 5(°)/s[16].有效载荷自身配有太阳导行镜稳像系统,姿态指向精度优于10″,全日面矢量磁像仪(full-disk vector magnetograph,FMG)的稳定度为0.25″/30 s.ASO-S计划预计在2022年底具备发射条件,设计寿命不少于4年[17].
2.4 羲和号
2021年10月,我国首颗太阳探测科学技术试验卫星“羲和号”成功发射.它将在国际上首次实现太阳Hα波段光谱成像的空间探测.“羲和号”卫星设计寿命3年,在高度517 km、倾角98°的太阳同步轨道上实现24 h对太阳连续观测.
3 探测器控制系统方案设计
如前所述,环黄道面L4和L5点探测器可实现对太阳赤道面轴向全景连续观测,研究太阳磁场周期产生机制、太阳活动机制等科学问题.同时,L4和L5点能够从很好的空间视角连续监测日地连线上太阳活动的传播和演化,提前观测到太阳活动的征兆,从而深入认知太阳活动对地球空间环境与航天系统的影响,为空间天气预报做出重大贡献.太阳极轨探测器可实现太阳极区高倾角、高重访率观测,揭示太阳活动周期和高速太阳风起源之谜.
本文提出一种太阳立体探测任务的初步方案,采用4颗探测器,即在日地L4和L5点的Halo轨道上各布置一颗探测器A1与A2,在太阳极轨布置两颗共轭飞行的探测器S1与S2,如图4所示.黄道面内的探测器A1与A2,有效载荷对全日面成像,满足360°全景成像需求;黄道面外的探测器S1与S2利用极轨轨道视角优势从黄道面的上/下方居高临下观测日地空间能量物质的传输和演化,对地球空间天气及日球层的影响做出准确预报;探测器A1与A2具有大于70°的圆锥视场,能够对日地连线无缝覆盖观测;这4颗探测器可实现太阳的全方位立体探测.探测器可配置日冕仪、射电望远镜等太阳活动探测载荷,有效载荷自身可配置稳像系统,实现高精度的姿态稳定要求.
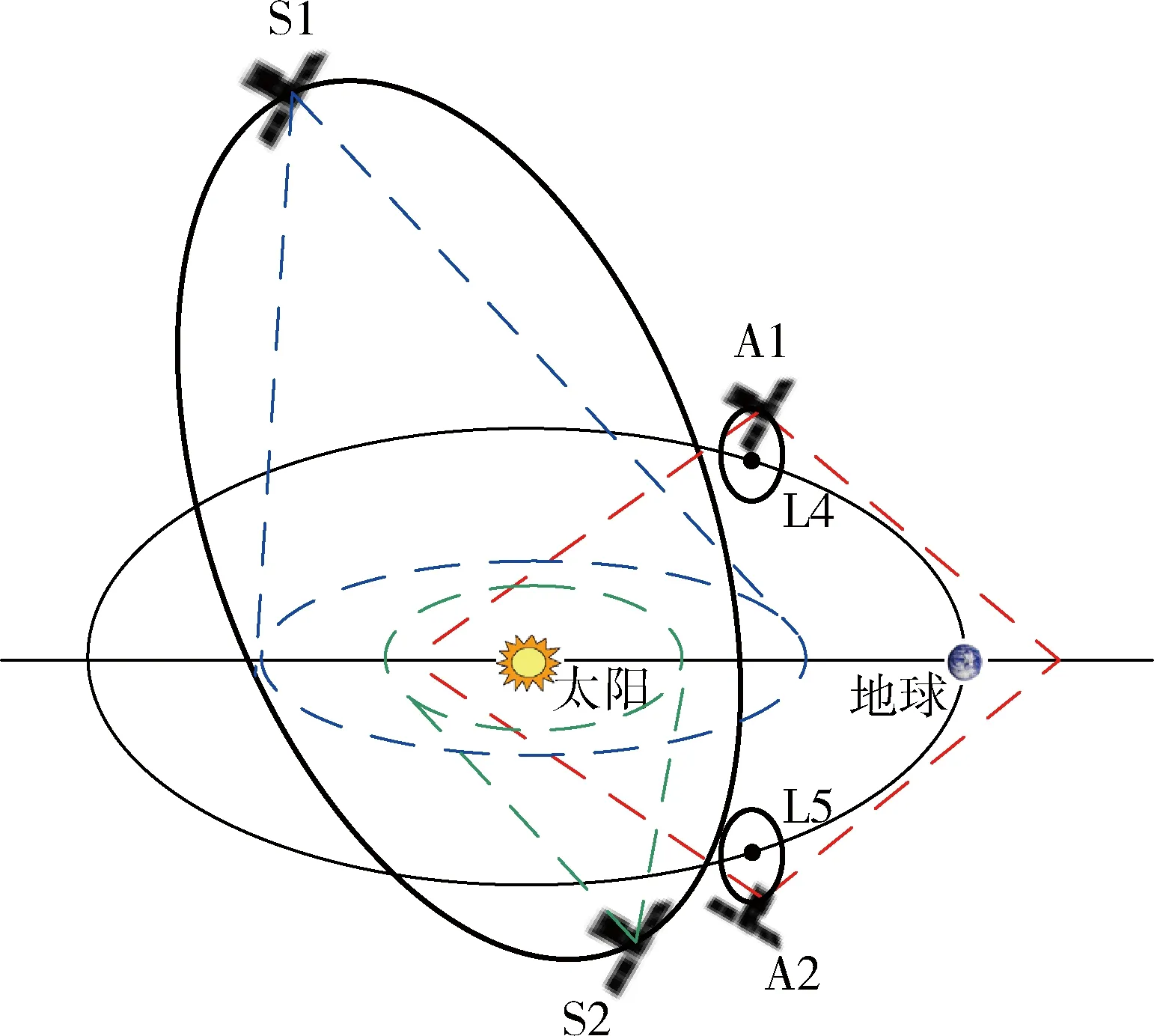
图4 太阳立体观测任务示意图Fig.4 The geometry diagram of Sun stereoscopic exploration mission
3.1 控制系统性能要求
为达到探测器的正常控制要求,控制系统应满足的指标要求为:三轴姿态指向精度10″(3σ)、三轴姿态指向稳定度0.000 3(°)/s(3σ)、天线指向精度0.08°(3σ).
3.2 控制系统配置
探测器控制系统由星敏感器、加速度计、数字太阳敏感器、太阳导行镜、光纤陀螺、动量轮、帆板驱动机构、变轨发动机与10N推力器以及中心控制单元等组成.探测器配置两块太阳帆板,单轴驱动;高增益天线为双轴驱动.考虑深空探测的长寿命需求,进行冗余配置.控制系统的组成如图5所示.
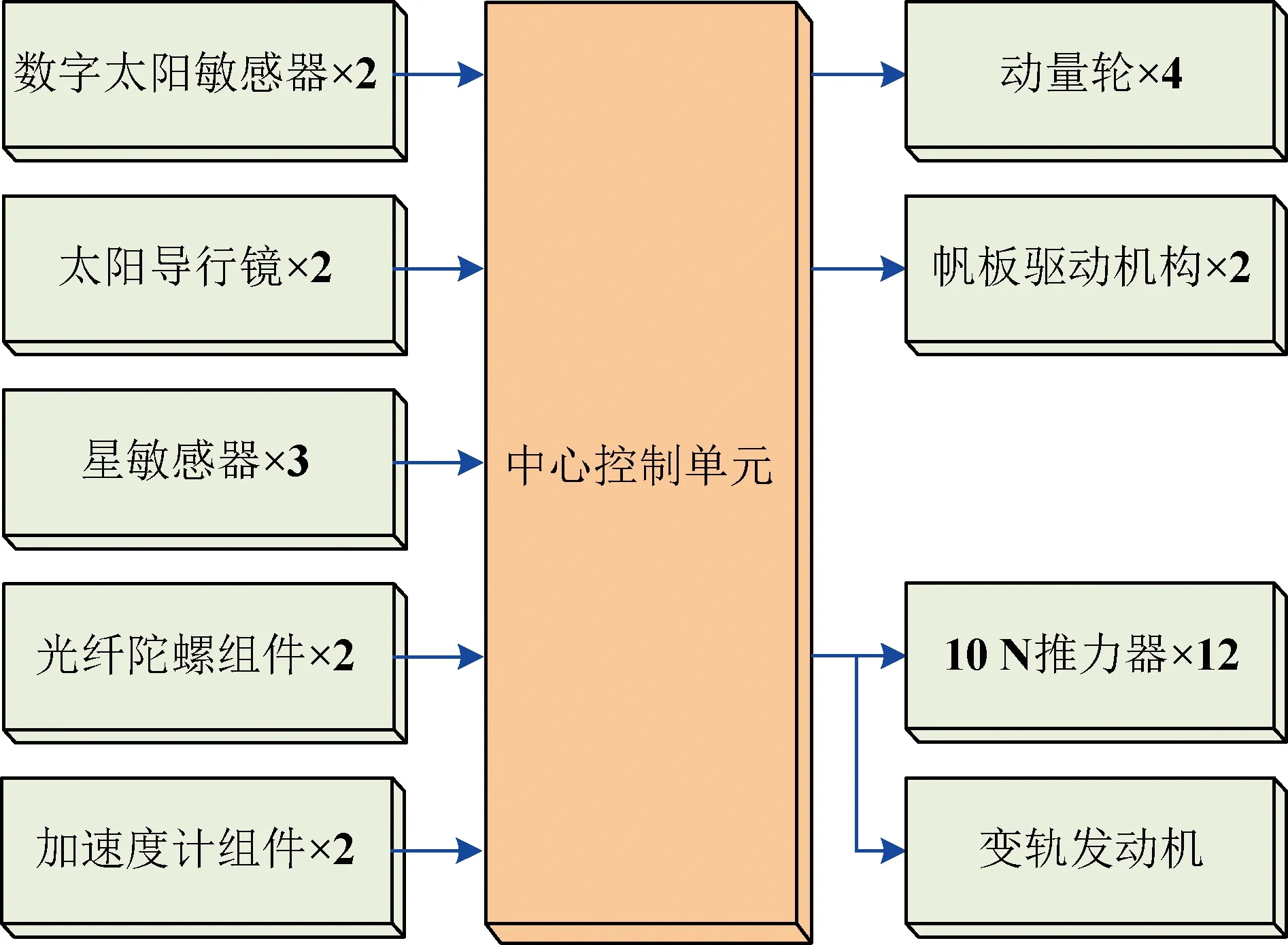
图5 控制系统配置图Fig.5 The diagram of control system
变轨发动机实现转移轨道中途修正以及目标Halo轨道的捕获,10N推力器实现姿态控制、平动点轨道控制以及动量轮卸载.
探测器采用三轴稳定姿态控制方式,有效载荷自身配置稳像系统.
3.3 控制器设计
对日正常模式基于太阳导行镜/星敏感器+陀螺的组合滤波定姿,三轴采取主动轮控,控制器基于PID+滤波器方式,保证姿态指向和姿态稳定度,设计参数满足一定的稳定性裕度.控制器结构框图如图6所示.
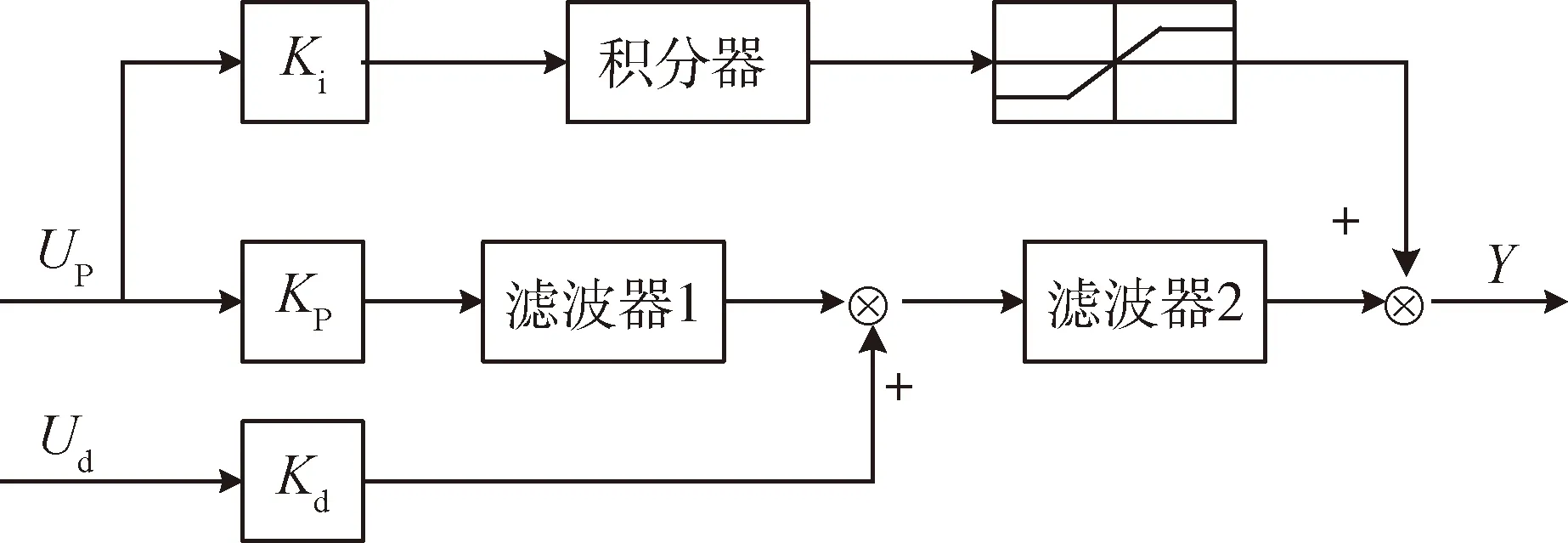
图6 控制器结构框图Fig.6 The diagram of controller
图6中,Up和Ud为控制器输入信号,Y为控制器输出信号,Kp、Ki、Kd为比例、积分、微分控制系数.
滤波器1(姿态滤波器)取如下结构形式:
(1)
其中,T1为滤波时间常数.
滤波器2为如下二阶形式:
(2)
其中,T2和T3为滤波器时间常数,D2和D3为滤波器阻尼.
3.4 平动点轨道控制策略设计
虽然L4和L5是稳定的平动点,但由于空间各种摄动源的存在,运行在其附近的探测器需要不定期的进行轨道维持.选定目标Halo轨道后,在探测器运行过程中将其控制在目标轨道附近.可以采用两种轨道控制方式:一种是时间控制,即每隔一段时间对探测器控制一次;另一种是位置控制,即每当探测器与目标轨道偏移距离超过预先设定的范围时控制一次.由于在L4和L5点附近运行的探测器,只用于太阳观测,对位置精度要求可适当放宽,采用时间控制更利于工程实现[18].轨道控制中,根据推力器喷气方式的不同,又可分为瞬时推进(化学推进)[19]和连续小推力推进[20]两种方式.
本文基于微分修正法,对平动点轨道进行时间控制或位置控制.
设探测器的初始状态Ji和末端状态Jf之间的关系为
Jf=g(Ji)
(3)
两状态之间的误差关系可线性化表示为
(4)

(5)
其中,Rf和Vf为末端时刻的位置和速度,Φrv和Φvv为状态转移矩阵中末端位置、速度相对初始速度的偏导数,有
(6)
(7)
(8)
则由式(5)可得
(9)
式中,δd=d*-d,由于期望的d*=0,因此有δd=-d.则修正量为
δVi=-AT(AAT)-1d
(10)
其中
(11)
预先设定中途修正次数为N次,对应的修正时刻为ti,其中i=1,…,N,每一次修正均以下一次修正时刻探测器在标称轨道上的位置为目标.
平动点轨道控制策略,可用于星上自主进行Halo轨道维持,还可用于地球到L4点/L5点的转移轨道中途修正.
4 仿真验证
针对提出的姿态与轨道控制初步方案,进行仿真分析,验证三轴姿态指向精度、指向稳定度以及天线指向精度等关键指标的符合性.
(1)姿态控制仿真结果
探测器转动惯量:Ixx=1 100 kg·m2,Iyy=690 kg·m2,Izz=700 kg·m2.
敏感器测量精度:太阳导行镜俯仰和偏航精度3″(3σ),星敏光轴指向精度3″(3σ),陀螺常值漂移1(°)/h,随机漂移0.01(°)/h(1σ).
初始姿态:[0.01°,0.01°,0.01°],初始角速度为[0.001(°)/s,0.001(°)/s,0.001(°)/s].
控制精度要求:姿态指向精度优于10″(3σ),指向稳定度优于0.000 3(°)/s(3σ),天线指向精度优于0.08°(3σ).
姿态指向精度、稳定度以及天线指向精度仿真曲线如图7~9所示.
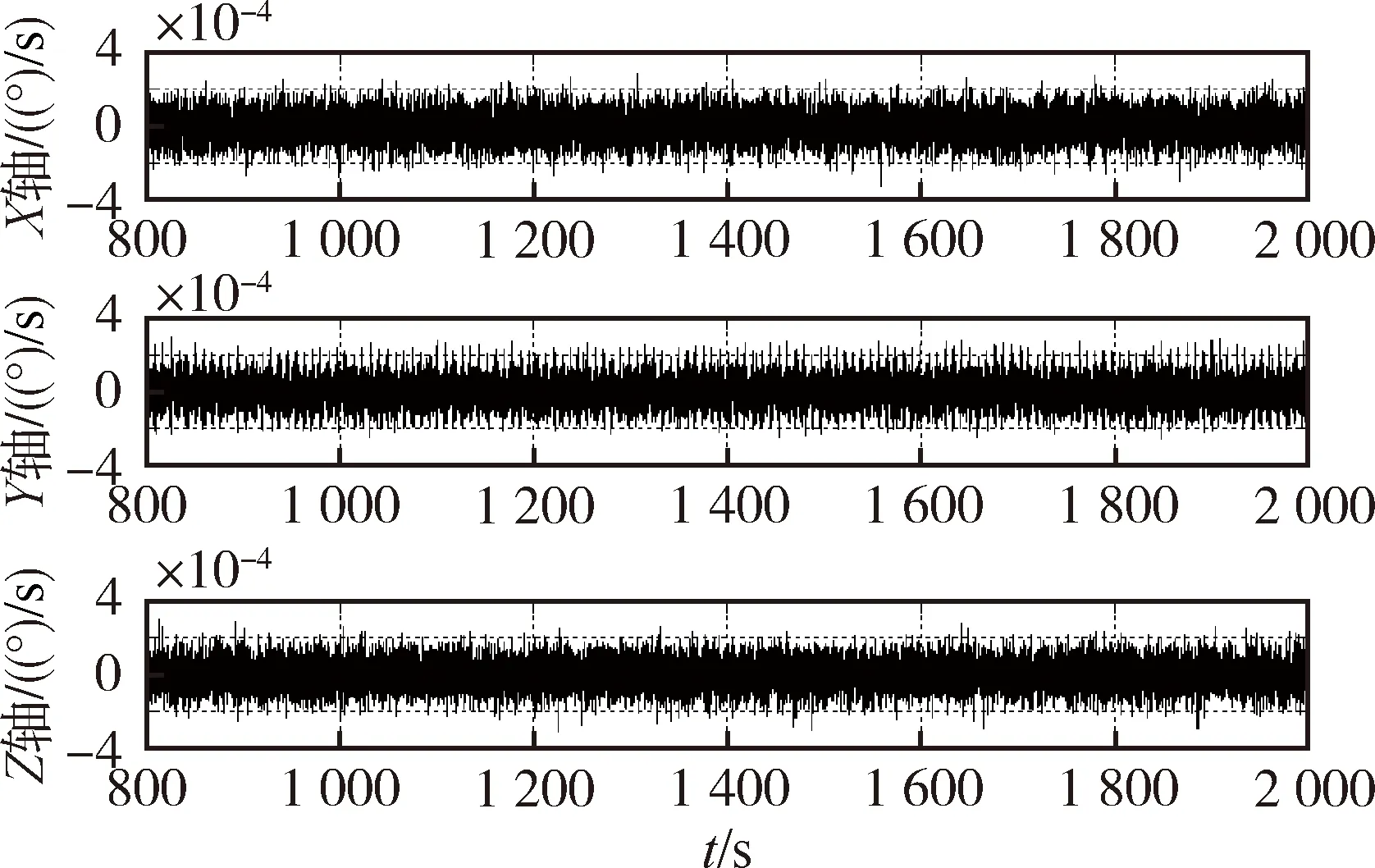
图8 姿态角速度曲线Fig.8 The curves of attitude angular velocity

图9 天线指向精度曲线Fig.9 The curves of antenna pointing accuracy
可以看出,三轴姿态指向精度优于10″,三轴姿态指向稳定度优于0.000 3(°)/s,三轴天线指向精度优于0.08°,满足指标要求.
(2)轨道控制仿真结果
选择一条环绕L4点的目标轨道,轨道周期约一年,图10给出了该条轨道具有初始入轨误差(三轴位置偏差100 km、三轴速度偏差0.1 m/s)时运行10年的轨道.可以看出,轨道的漂移现象并不十分严重.因此,对探测器的位置精度要求不是很高的话,可以在很长一段时间内不进行轨道控制.
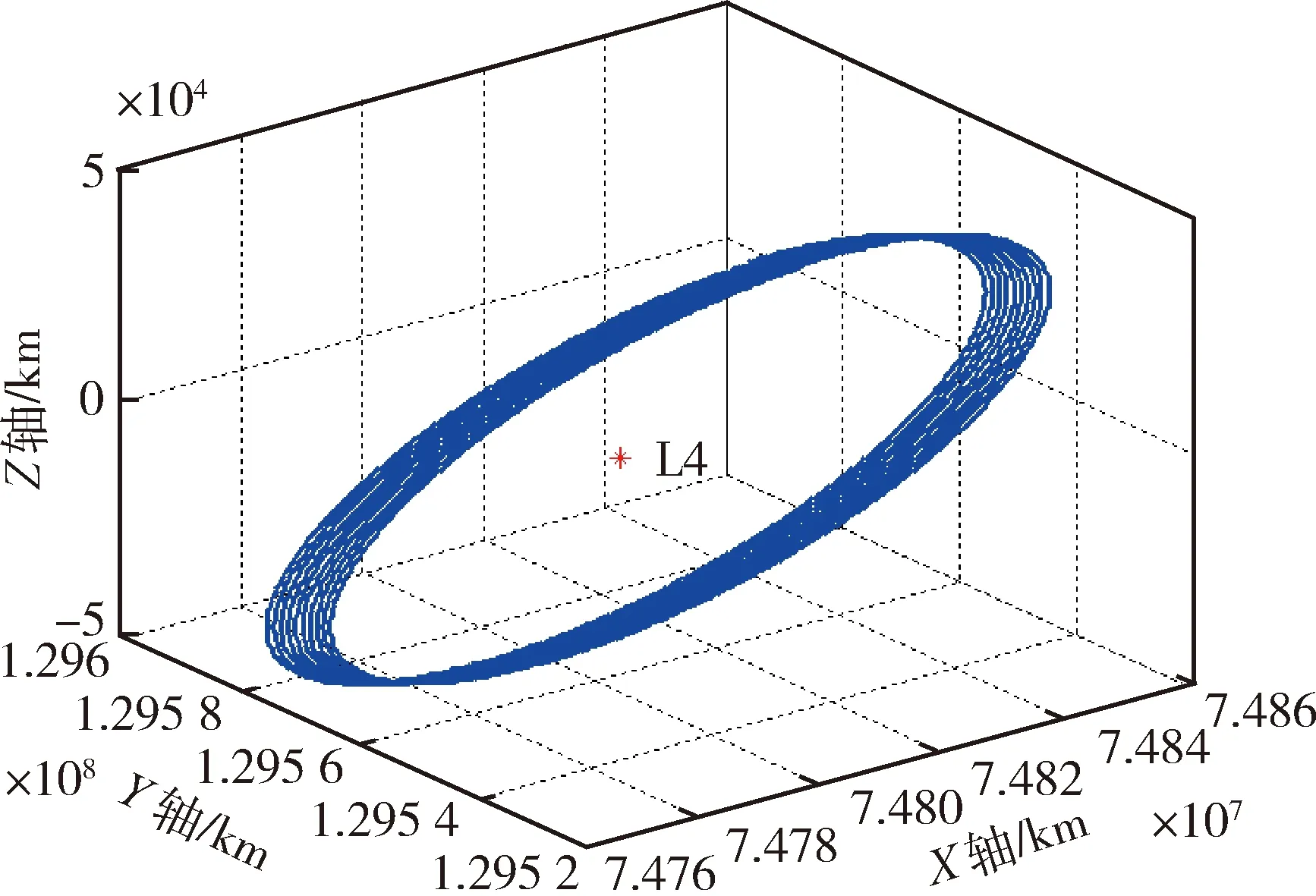
图10 未施加轨控Fig.10 The orbit without maneuver
如果空间探测要求探测器的位置保持在目标轨道附近而不出现较大范围的轨道漂移,那么需要进行轨道控制.对于上述目标轨道,每182.5天施加一次轨控,10年轨控消耗约0.35 m/s,轨控效果如图11所示.
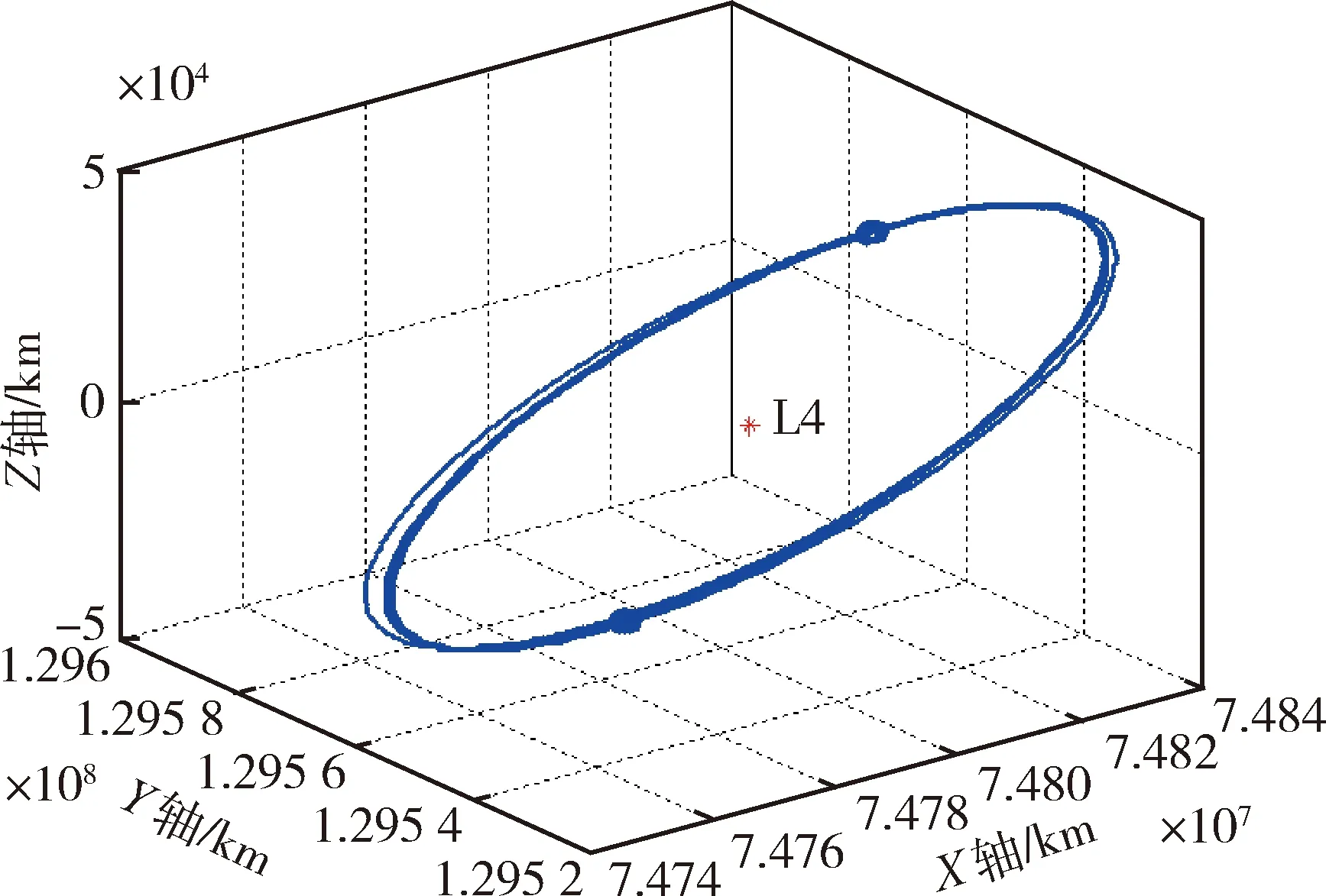
图11 施加轨控Fig.11 The controlled orbit
可以看出,施加轨控后,探测器基本维持在目标轨道附近,没有出现较大范围的轨道漂移.
5 结 论
本文在国内外太阳探测任务调研分析的基础上,提出了一种在日地L4和L5点以及太阳极轨布置4颗探测器的太阳探测构想,给出了姿态控制与轨道控制初步方案.仿真结果表明,探测器三轴姿态指向精度优于10",三轴姿态指向稳定度优于0.000 3(°)/s,可以满足太阳立体探测任务高精度高稳定度的对日指向需求.提出的基于时间控制的平动点轨道控制策略,10年轨控消耗很小,如果对探测器的位置精度要求不是很高的话,可以在很长一段时间内不进行轨道控制.该方案对我国今后的太阳立体探测任务有一定的参考价值.
猜你喜欢
天文研究与技术(2022年1期)2022-01-10
疯狂英语·新悦读(2021年11期)2021-11-28
宇航计测技术(2021年3期)2021-08-17
中学生数理化(高中版.高考数学)(2021年6期)2021-07-28
传媒评论(2017年8期)2017-11-08
电测与仪表(2016年12期)2016-04-11
橡胶工业(2015年2期)2015-07-29
知识窗(2014年9期)2014-12-08
西北农林科技大学学报(自然科学版)(2014年9期)2014-03-26
天文研究与技术(2013年4期)2013-12-18
