高折展比载人月球应急返回车设计与分析
2023-04-10 00:41齐迎春梁常春
光学精密工程 2023年5期
王 康,齐迎春,梁常春,申 彦,邹 猛*
(1.中国空间技术研究院 北京空间飞行器总体设计部,北京 100094;2.吉林大学 工程仿生教育部重点实验室,吉林 长春 130022)
1 引言
随着美国重返月球计划的提出,欧盟、英国、印度、俄罗斯和日本也都提出了无人或载人登月探测计划[1-3]。在月球探测时,月球车是重要的探测、巡视、移动、工程和载荷平台[4-5]。各国对无人月球车和载人月球车都进行了大量的预先研究[5]。目前月球车研制主要以无人月球车居多,载人月球车则相对较少,这主要是由于载人月球车要求更高的综合研发技术和发射承载能力。在移动系统方面,月球车移动系统目前仍以轮式为主,履带式、腿式和复合式移动系统较少[6]。
无人月球车主要包括NASA 和凯耐基梅隆机器人研究所合作研究的月球车Scarab,挥发物探测与极地探索月球车(Volatiles Investigating Polar Exploration Rover,VIPER)、NASA 研制的主要用于发现水资源的K-REX 月球车等[7-8]。
美国NASA 的LRV 作为第一辆载人月球车,由波音公司和通用公司制造(子承包商),随着Apollo15、16 和17 在1971~1972 年成功着陆月面并实现巡视探 测[1,5,9]。Chariot 是美国NASA 为了重返月球在2007 年开始研制的新一代模块化载人月球车移动系统平台。Chariot 在研制过程中,充分吸取了美国第一代月球车LRV研制的经验和教训,采用了全新的设计理念和模式,以满足开放式和带密封舱的月球车对移动系统的需求[10-11]。ATHLETE(All-terrain,Hex-Limbed,Extra-terrestrial Explorer)是 由NASA的JPL 实验室、斯坦福大学和波音公司于2005 年3 月开始联合设计的一款六足式月球车移动平台,共研制了两代原型样机[12-16]。日本Toyota 公司与JAXA 合作,面向2029 载人登月设计了一款带加压舱的月球车。为了实现2037 年载人探测火星计划,NASA 设计了新型带加压舱火星车Manned Mars Expedition Rover(MER)[15]。
根据调研可知,除了美国NASA,国外载人月球车研制主要以概念设计为主,还没有开展工程研制和验证试验。美国具有LRV 研制的成功经验,目前月球车研制主要面向大型载人月球车和带加压舱载人月球车[1,16-17]。
从远距离观测到无人平台探测,从载人落月返回到载人月球车探索再返回,人类针对月球探索的越来越深入,未来很可能在月面长时间停留研究,这就需要能够满足宇航员安全折返和拓展探测范围的载人月球应急返回车辆[1,5]。无加压舱月球车或带舱月球车研究是各国关注的未来月球车的研究热点,但对于由于意外引起的宇航员返回需求,或单人宇航员近距离机动需求的“应急返回车”概念及方案尚未被提出。基于小尺寸、低质量、灵活性等特征,解决短距离、低承载、机动性移动需求的小型月球车研究较少。为此,本文提出了一种折叠式载人月球应急返回车设计。
2 结构设计
可折叠载人月球应急返回车作为一个独立的模块,可放置于载人月球车后部,如图1 所示。该装置主要作为应急生保,也可以作为短距离航天员移动工具(轻量化),在基地周边进行活动。

图1 应急返回车应用场景Fig.1 Application scenario of emergency return vehicle
应急返回车设计的设计要求为:(1)承载质量≥90 kg;(2)包络尺寸≤600 mm×500 mm×400 mm;(3)转向能力为需具有行进间转向能力;(4)越障能力≥10 cm;(5)爬坡能力为软地面不小于8°,硬地面不小于10°;(6)最大速度不小于10 km/h。
如图2 所示为应急返回车概念设计,应急返回车采用四轮结构,由后轮驱动,前轮转向,四轮全部采用摆动展出式结构;选用宇航员乘坐驾驶模式,并提供了宇航员脚踏板。此外,为了增加整车稳定性,车身采用了主梁伸缩结构,后横梁伸长结构。展开后车辆底盘水平尺寸能有效地包络宇航员水平向展开范围。同时,利用座椅、手柄、安全带以及前梁中设置的脚蹬,保证宇航员在车上相对固定。

图2 应急返回车概念设计Fig.2 Concept design of emergency return vehicle
基于四轮结构和座椅式驾乘方式,以宇航员安全性和可操作性为基准。采用了折叠、伸展结构,取消了宇航员不方便进行操作的组装、展开和调节等环节。
根据已知宇航员(包括宇航服)的束缚和安全保障结构及细节,方案以框架+尼龙带形式,提供驾驶座椅坐面及靠背。同时提供两侧扶手限制宇航员左右晃动,如图3 所示。

图3 应急返回车渲染效果Fig.3 Rendering effect of emergency return vehicle
后轮作为主驱动,采用轮毂电机方案,直接安装于后轮上,通过后支臂,推动车辆行进。轮毂方案可大大减少应急返回车结构空间,提高整机可靠性。前轮转向直接地采用转向电机方式,利用2 个转向电机直接控制两侧前轮转向,取消了常规转向机构的推拉杆。
考虑到使用用途和结构尺寸限制,应急返回车取消了操作面板、仪器仪表等装置,只保留了宇航员手控手柄。全部的操控都由宇航员手动控制,操作响应的反馈信息都直接接入到宇航员信息系统中。应急返回车整车结构示意图如图4。
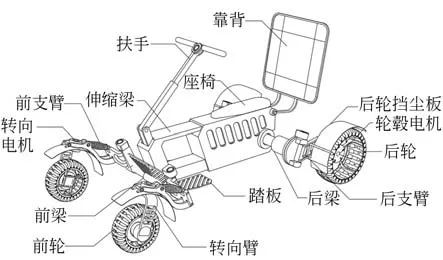
图4 应急返回车结构Fig.4 Emergency return vehicle structure
3 折展分析
为了满足发射空间对应急返回车的要求,结合月面环境下宇航员操作可行性和可靠性,以简便和可靠为目标设计了应急车的折叠方案。同时,考虑到载人月球车后部的空间限制,该应急返回车的折叠状态设计采用除球体之外最省空间的立方体结构,如图5 所示。

图5 折叠状态结构Fig.5 Folded state structure
应急返回车展开的主要过程分为:(1)车轮展出环节:包括伸展、旋转方式;(2)底盘伸展环节:主要为前悬挂伸展,以及车底盘踏板的展开;(3)座椅展开环节:以座椅的展开为主;(4)操作台展开环节:手控手柄位置抬升。以上所有展开过程,均以旋转折叠或抽伸等方式实现,避免繁琐的装配组装过程。图6 为应急返回车展开过程示意图。

图6 应急返回车展开过程Fig.6 Expanded process of emergency return vehicle
图7 为后梁伸出电动结构设计方案。后梁内部安装双螺纹推杆,配套的双侧螺杆螺母固定在后轮扭臂柱上,通过电机的正反转,实现双侧的后轮扭臂柱向外或向内移动。

图7 后梁伸出电动结构Fig.7 Rear beam extension electric structure
后轮可在内部双头推拉杆的作用下,实现不同轮距调整,如图8 所示。由于采用了丝杠推拉杆,基于螺纹螺母的配合关系,在电机停止状态下,推拉杆可自行锁止,保证应急返回车展开后机构锁紧。后轮伸展双向电推杆参数为:推力为300 N,行程为300~600 mm,速度为50 mm/s,锁紧力为300 N。
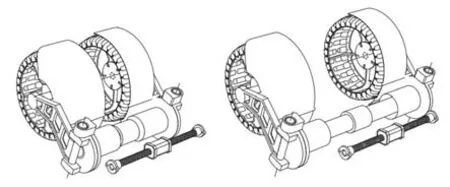
图8 后轮伸展结果Fig.8 Rear wheel extension result
如图9 所示,应急返回车主梁的伸缩也采用电动推杆方式,主梁的伸长有助于加大应急返回车轴距,提高车辆稳定性,增加宇航员在车上空间。
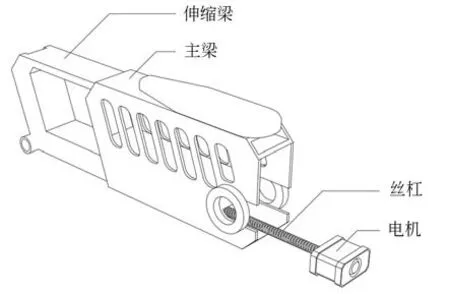
图9 主梁伸展电动机构Fig.9 Main beam extension motorized mechanism
主梁伸展采用的电动推拉杆参数为:推力为1 200 N,行程为400~900 mm,速度为50 mm/s,锁紧力为1 200 N。由于丝杠螺母的自锁紧特性,主梁在伸缩后不再需要其他机械式锁紧机构。
为了减少折叠后车辆的包络尺寸,前后轮都采用了向车内180°折叠靠拢的方案。展开时前后轮都需要从车腹部旋转180°转出。四个轮子的转出,全部采用各自独立的蜗轮蜗杆大扭矩舵机,实现前后轮支臂的180°旋转。
蜗轮蜗杆结构具有体积小、转动比大、自锁紧的工作性能。采用蜗轮蜗杆大扭矩舵机,直接驱动车轮支臂的180°旋转,并且可实现转动后自锁紧,可取消机械式锁紧机构。
前后轮旋转支臂上蜗轮蜗杆旋转舵机安装位置如图10 所示。由于蜗轮蜗杆舵机的结构及原理简单,可靠性满足设计要求。

图10 前后轮支臂上蜗轮蜗杆旋转舵机安装位置Fig.10 Worm wheel worm steering gear mounting position on the front and rear wheel support arms
根据应急返回车展开过程及机构锁紧,四轮展出用蜗轮蜗杆舵机参数为:转速为18°/s(3 rpm),扭矩50 N·m,角度范围0°~180°。
如图11 所示,后车轮以后梁臂转轴为中心,向后旋转180°,增加轴距300 mm,后梁臂转轴与车身垂直面倾斜18°,以实现折叠展开后的后车轮下放,车身高度提升至200 mm。

图11 后轮展开结构Fig.11 Rear wheel deployment structure
如图12 所示,前车轮以前梁臂转轴为中心,向前旋转180°,增加轴距300 mm,前梁臂转轴与车身垂直面倾斜25°,以实现折叠展开后的前车轮下放,车身高度提升至200 mm。车架可继续伸长,最大化车身长度。
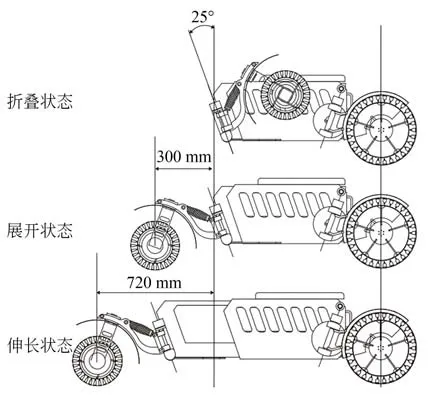
图12 前轮展开和车梁伸长Fig.12 Front wheel deployment and beam extension
应急返回车的宽度扩展由车轮外展以及后轮梁外伸实现。如图13 所示,前轮向外展出时,轮距由140 mm,扩展至640 mm~660 mm;主梁、伸缩梁相对运动,由400 mm 扩展至600 mm;后轮向外展出后,轮距扩展至840 mm~940 mm。整车展开后尺寸为:长1 890 mm,宽1 240 mm,高900 mm;折叠后尺寸为:长600 mm,宽500 mm,高400 mm。应急车展开体积与折叠体积比最大约为17.6。

图13 车身宽度扩展结构示意图Fig.13 Structure schematic of body width extension
4 移动设计
立方体应急返回车CELV 的驱动采用后轮直接驱动方式,行驶速度要求10 km/h,按后轮直径400 mm 计算,车轮转速要求:0~150 rpm。根据计算,最终确定驱动参数要求:
(1)转速:0~200 rpm;
(2)扭矩:≥15 N·m;
(3)电源:24~36 VDC;
(4)轮毂式电机尺寸要求:直径≤150 mm,长度100 mm;
(5)形式:盘式无刷高速电机+减速/DD 直驱电机/伺服电机+减速电机;
图14 为后轮驱动电机安装示意图。图中电机直接安装于后支臂上,电机输出端为法兰盘式,直接安装于后轮盘面上。
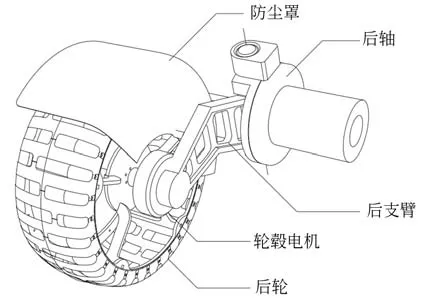
图14 电机安装示意图Fig.14 Schematic of motor installation
整车共采用2 个轮毂电机驱动2 个后轮,获得最大30 N 驱动力。由于安装空间限制,方案中未考虑差速轴传动等形式。同时为了减轻质量,也没有采用DD 直驱式电机。
应急返回车转向机构采用前轮转向方案如图15 所示,前轮由单侧C 型转向臂与前轮支臂上的转向电机连接。两侧的转向电机根据转向指令,按照转向圆函数关系,转动相应角度完成转向操作。针对应急返回车时速可达10 km/h,为了避免转向力过大和转向不稳,前轮转向倾角设为30°。

图15 前轮转向方案Fig.15 Scheme of front wheel steering
应急返回车主要用于宇航员的应急返回,相对于无人车行驶速度快,对宇航员的舒适性要求更高。方案中应急返回车轴距和轮距都进行了适当加长,并降低重心。车轮间触地距离大,对车架适应性和稳定性要求高。因此,应急返回车方案中,前后车轮都增加了独立的减振设计。如图16 所示,前轮的减震采用弹簧减震筒。
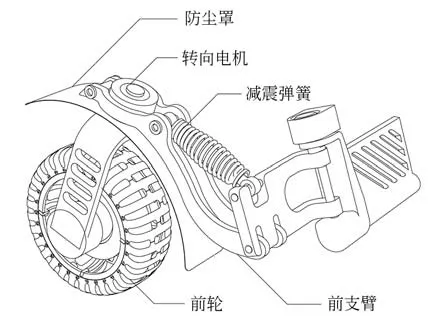
图16 前轮减震及转向机构Fig.16 Front wheel shock absorbing steering mechanism
地面的起伏可通过减震筒的弹性变形自适应,保持车轮一直触地状态;当行驶过程中产生振动时,弹簧和阻尼构成的减震筒可有效地过滤振动,保证车架上的宇航员免受振动影响,防止车辆的共振及倾翻。
图17 为应急返回车后轮的减震结构示意图。后轮的减震机构由扭力梁和摩擦法兰副构成。后轮的摆动和振动通过后支臂传递到扭力梁,同时扭力梁连接处摩擦法兰副吸收摆动过程能量,以摩擦热形式消耗,实现阻尼效果。
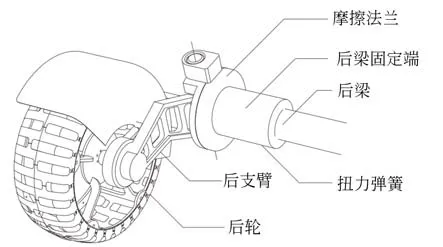
图17 后轮减震结构Fig.17 Rear wheel shock absorbing structure
应急返回车车轮设计参数如下:
(1)后轮/驱动轮:直径400 mm、轮宽150 mm、厚度50 mm、最大静载荷150 kg、最大变形20 mm/1 500 N。
(2)前轮/转向轮:直径280 mm、轮宽100 mm、厚度40 mm、最大静载荷150 kg、最大变形20 mm/1 500 N。
车轮全部采用金属材料,其中,轮毂采用铝合金材料,胎面材料用65 Mn 弹簧钢材料(需热处理)。
5 性能试验
根据设计方案,加工、组装了一辆应急返回车,并进行了折展、移动性等试验,验证车辆是否满足设计要求。
5.1 折展试验及具体参数
如图18 所示为折展试验,所设计应急返回车可通过遥控实现自动展开和折叠。在折展试验过程中,对应急返回车的具体参数进行了测量。整车总重39.8 kg,展开后尺寸为:长1 891 mm,宽1 235 mm,高902 mm;折叠后尺寸为:长600 mm,宽498 mm,高399 mm。应急车展开体积与折叠体积比为17.67,基本与设计尺寸一致。设计尺寸与实物尺寸存在较小的差值,主要是由零部件加工及装配误差导致。
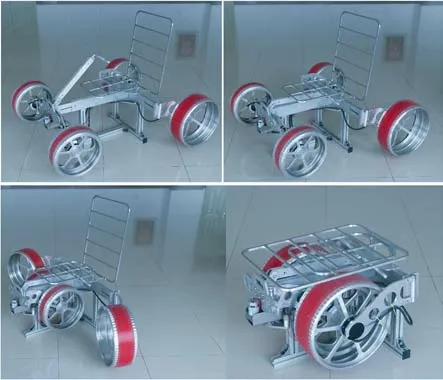
图18 应急返回车折展Fig.18 Emergency return vehicle folding and extension
5.2 移动性试验
为了验证该装置的性能,我们进行了行驶、转向、越障、爬坡和承载试验。
(1)行驶试验
采用卷尺测距得到直线方向上3 个间隔5 m的定位点并采用地标标注,控制应急返回车在平稳状态保持最大速度沿该直线前向行进或后向行进通过该三点,并用秒表依次测量并记录驶过两点的时间间隔,通过行驶时间及行驶距离计算出行驶速度。试验显示,在前向行驶过程中,应急返回车驶过5 m 距离用时0.9 s 即速度为5.56 m/s。设计要求前向行进时速度应不小于10 km/h 即2.78 m/s,满足设计要求。
(2)转向试验
将应急返回车调整为最大转角后进行测量,其最大前轮摆角为20°,转向圆半径约5 m。图19和图20 分别为前轮右、左转向实验。

图19 前轮右转向Fig.19 Front wheel right steering

图20 前轮左转向Fig.20 Front wheel left steering
(3)越障试验
图21 为应急返回车越障试验,在10 cm 以上单块凸起、凸凹路面情况下应急返回车均可平稳通过。

图21 越障试验Fig.21 Barrier crossing test
(4)爬坡试验
图22 为在松软地面上进行爬坡测试,图23为在硬质地面上进行爬坡测试,应急返回车均可平稳向上行驶且不出现打滑现象。

图22 松软地面爬坡测试Fig.22 Climbing test on soft ground

图23 硬质地面爬坡测试Fig.23 Climbing test on hard ground
(5)承载试验
在空旷地形环境下,让两位体重分别为60 kg 和70 kg 的成员共同坐在应急返回车座椅上,控制车辆行驶,结果表明,应急返回车可在130 kg 载荷下正常行驶。

图24 承载试验Fig.24 Loading test
5.3 试验结论
折展试验、移动试验等证明,所设计装置满足设计目标。
(1)应急车可在遥控下完成折叠和展开,设计折展比为17.6,实物折展比为17.67。
(2)设计要求前向行进时速度应不小于10 km/h 即2.78 m/s,实物测量应急返回车驶过5 m 距离用时0.9 s,速度为5.56 m/s。
(3)应急返回车最大前轮摆角为20°,转向圆半径约5 m。
(4)应急返回车在10 cm 以上单块凸起、凸凹路面情况下均可平稳通过。
(5)应急返回车在20°坡度的松软和硬质地面,均可平稳向上行驶且不出现打滑现象。
(6)应急返回车可在130 kg 载荷下正常行驶。
6 结论
本文依据月球探测应急生保和短距离移动需求,设计了一种“立方体”应急返回车(Cube Emergency Lunar Vehicle of China,CELV),综合考虑了宇航员的安全性、舒适性和返回车的可靠性、可操作性、需节省空间等因素,对车身构型、折展模式、驱动方式、底盘结构、悬挂转向、车轮等多个模块进行了设计优化,并进行了试制和试验。
在折展模式的选择上,采取折叠和伸展相结合,无需组装、装配工艺,并将前后轮设计成不同直径,采用车轮相套的方式,减少了折叠尺寸;通过返回车整体有效的折叠设计,实现了较高的展/折比,折展比大于17。
对于驱动和转向方式,采用了后轮轮毂电机驱动,前轮独立转向,简化了转向结构,提高了传动效率。
在应急返回车的构型设计上,采用了车身拉长,后横梁延长拉伸方法,提高了整车轴距轮距,并且增加了踏板和前梁脚踏,四轮均增设挡尘板,进一步保护车辆及宇航员。
车轮采用了全金属弹性轮,保障月球环境下的适应性和可靠性,并在前后轮均设置减震单元,保障行进过程的稳定性和舒适性。
设计的应急返回车满足行驶、转向、越障、爬坡要求。
猜你喜欢
汽车维护与修理(2022年5期)2022-09-06
装备制造技术(2021年4期)2021-08-05
工业工程设计(2021年3期)2021-06-30
小学生学习指导·爆笑校园(2019年6期)2019-09-10
太空探索(2016年9期)2016-07-12
红蜻蜓·低年级(2015年11期)2016-02-02
汽车文摘(2015年3期)2015-12-11
中学科技(2015年7期)2015-07-03
中国自行车·骑行风尚(2014年4期)2014-10-10
世界科学(2014年2期)2014-02-28