
无人机集群多构型融合相对定位性能分析
2023-04-03 08:47潘礼规尹佳琪徐春光
兵器装备工程学报 2023年3期
潘礼规,尹佳琪,徐春光
(1.中山大学 航空航天学院, 广东 深圳 518107; 2.中国航天科工信息技术研究院, 北京 100144)
1 引言
近年来,无人机凭借体积小、成本低以及高度灵活性等优点受到广泛关注[1]。无人机集群概念的提出,进一步促进了无人机技术的发展,借助个体间的交互,实现群体行为的全局一致性协同,可实现单架无人机无法执行的作战任务,譬如集群中某架无人机发生故障时,可由集群编队中的其他无人机执行故障无人机的功能,从而提高整个系统的抗干扰能力和效能[2-3]。随着无人机集群技术的快速发展,无人机集群在农业植保、森林防火、智慧城市、物流运输、战场侦察与作战、目标搜索与追踪等方面将发挥巨大的作用[4-10]。
在复杂环境中,大规模集群无人机近距离飞行时,高精度、高可靠的导航与定位信息是实现高动态飞行的重要保障[11]。目前,诸多学者对相关技术进行了大量研究。文献[12]和文献[13]针对传统单主从式协同导航存在的精度发散问题,提出了分层式协同导航方案。其中,文献[12]以相对导航和惯性导航信息作为量测量,利用卡尔曼滤波算法估计校正惯性导航误差,使精度满足较长时间导航要求。文献[13]则通过增加长机数量,提高集群内部信息利用率,基于联邦滤波算法改善了导航性能。在导航定位过程中,无人机间的相对定位,特别是无依托的自主相对定位,对提高无人机集群的定位精度和抗干扰能力至关重要。
集群内部不同目标间的相对定位不仅应用于无人机集群,在其他集群场景中也大量存在,譬如卫星星座间的相对定位等,研究人员对相关方法开展了大量研究[14-15],其研究结论对改进无人机集群间相对定位算法具有借鉴意义。文献[14]考虑了故障星对星座几何构型的影响,针对剔除故障星观测数据进行定位解算时存在GDOP值突变的问题,采用加权最小二乘法提高了数据利用率,并改善了接收机自主完好性监测性能。文献[15]仿真研究了LEO星座对GNSS精密单点定位性能的增强作用,相比于单GPS系统,LEO星座的参与,可降低GDOP值、减小PPP滤波矩阵条件数以及加快PPP收敛时间,并且显著缩短了模糊度首次固定所需时间。文献[16]利用测距与站址坐标估计目标位置,3架无人机绕圆编队飞行,在编队成正三角形时,可获得最小GDOP值,提高了定位精度。上述文献通过改善观测几何减小精度因子值,进一步提高了定位精度。在大规模集群系统中,固定构型实现的数据链较为单一,多构型组合能够使集群具有更为灵活的应变能力,有望提高整个集群系统的抗摧毁能力。
针对大规模集群无人机相对定位问题,基于随机择机策略提出一种迭代估值定位解算方法,引入卫星星座间相对定位精度评估常用的精度因子作为评估准则,分析了观测时段内多构型融合对定位性能的影响,利用扩展卡尔曼滤波算法对无人机状态信息进行估计。
2 相对定位模型
2.1 方案设计
采用课题组研究团队提出的一种无人机集群相对定位技术,该技术在无人机机背上安装3个无线电发射/接收装置,每个天线均可实时检测和发射不同频率电波,通过机间观测,构建观测模型并进行导航定位解算,则可获得无人机状态信息。无人机机身上的天线安装示意图如图1所示。

图1 天线安装示意图
在无人机集群飞行环境中,随机选取一定数量无人机对某一架无人机进行定位解算,从无人机在主机围成区域内飞行,研究观测时段内多构型融合对飞行器定位性能的影响。图2显示了8架主飞行器组成立方体队形示意图。
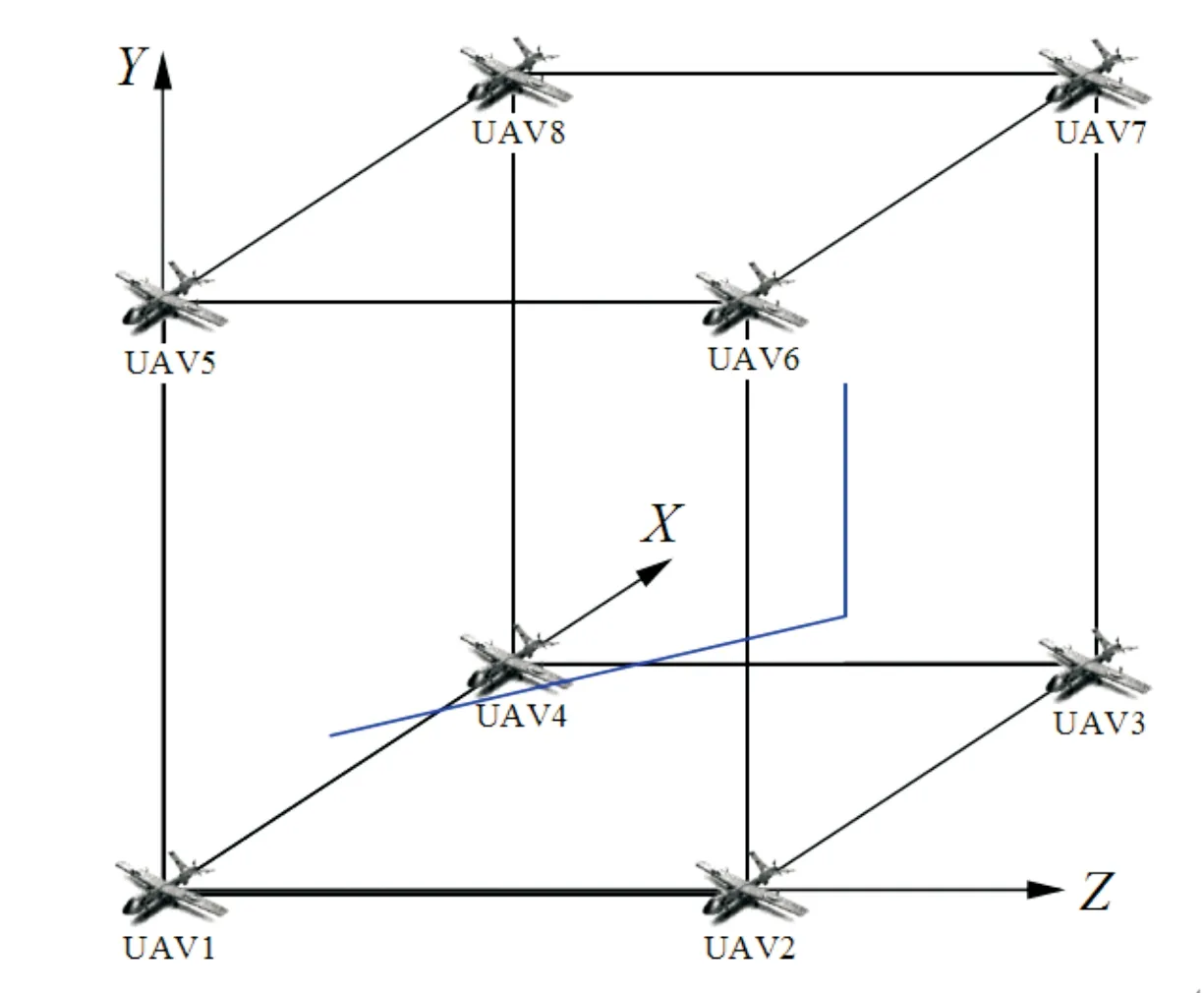
图2 8架主机组成立方体队形示意图
2.2 数学模型
每架无人机配备的3个无线电信号收/发装置,在其自身机体坐标系的位置分别为(a,0,0)、(0,0,b)和(0,0,-b)。根据相对位姿参考系,选取某一架主机机体坐标系作为其他无人机的导航坐标系,则从机3个天线位置信息可通过式(1)进行计算,即:
(1)
(2)
将式(2)代入式(1),整理得:

(3)
式(3)中:(x,y,z)表示从机位置坐标;(xj,yj,zj)表示从机天线位置。
假设一主机机体坐标系作为其他无人机的导航坐标系,则该主机3个天线位置坐标为:

(4)
式(4)中,Xi0表示领航主机天线坐标,且i=1,2,3。
结合式(3)与式(4),可得2架无人机机间距离表达式为:
(5)
式(5)中:i表示主机第i个天线;j表示从机第j个天线。
以载波相位作为量测值,其相位角与波长、距离有如下关系,即:
rij=θijλi/2π
(6)
记定位模型的非线性向量函数为:
Z=h(X)
(7)
式(7)中:Z表示相位转换至距离的观测向量;h(X)表示非线性向量函数。

(8)
式(8)中,v为观测模型噪声,满足均值为零的高斯白噪声序列。
3 相对定位解算
3.1 基本迭代求解


(9)
式(9)中:ΔX表示状态向量修正量;ΔZ表示观测向量估值偏差;RZ表示量测误差方差阵;PX表示定位误差方差阵;H表示非线性向量函数h(X)对状态向量X的Jacobian矩阵。
3.1.11MA-1FA模型
结合式(8)所示观测方程,可知观测量Z的估值偏差ΔZ具体形式为:
(10)
式(10)中,矩阵H表示非线性向量函数h(X)对状态向量X的Jacobian矩阵,表达式为:
(11)
式(11)中,矩阵Aj具体如下:
(12)
式(12)中:下标i表示主飞行器第i个天线;下标j表示从飞行器第j个天线。
3.1.2NMA-1FA模型
上述给出了单架主机对一从飞行器的定位估值方法,若是多架无人机对一架无人机进行观测定位解算,则全局观测向量Z为多架无人机观测向量的组合,有:
(13)
式(13)中,Zk表示第k架无人机对从无人机的观测向量,其中k=1,2,…,N。
相应地,非线性向量函数h(X)对状态向量X的Jacobian矩阵为:
(14)
式(14)中,Hk表示第k架无人机对从无人机的观测矩阵,具体如式(11)和式(12)所示。
3.2 导航滤波估计


(15)
3.2.1状态更新
任意无人机3个天线状态方程表达形式为:
(16)
式(16)中:uk-1表示输入矩阵;Bk-1表示控制矩阵,取Bk-1=τI9×9,其中τ=tk-tk-1表示观测采样间隔;Φk|k-1表示状态转移矩阵,取Φk|k-1=I9×9。
3.2.2观测更新
多架无人机对单架无人机的观测向量和观测矩阵如式(13)、式(14)所示,将状态更新方程和观测更新方程代入递推方程式(15),可滤波估计出无人机的位置状态信息。
3.2.3参数更新
利用上述方法可估计出飞行器3个天线的位置信息,再根据天线在机身上固有的安装位置关系,进一步得到飞行器机体坐标系位置信息,即:
(17)
相应地,结合式(3),可进一步获得该飞行器在导航坐标系中的相对姿态估值,有:
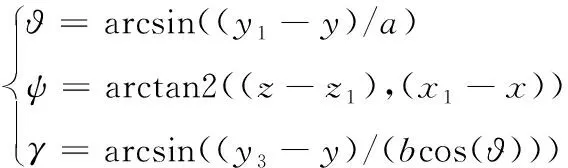
(18)
4 几何构型评估
4.1 权系数阵
式(8)给出了无人机非线性定位方程,仅考虑位置状态参数时,线性化处理后得;
(19)
式(19)中,Δxj表示天线j的状态修正量。式(19)的最小二乘解为:
(20)
考虑测量误差项εr时,式(20)的最小二乘解为:
(21)
将式(20)代入式(21),则有:
(22)
式(22)表示测量误差与定位误差之间的关系。
Rεr=E((εr-E(εr))(εr-E(εr))T)=
(23)
式(23)中,I表示9×9的单位矩阵。
因此,简化的定位误差向量协方差阵为:
(24)
4.2 精度因子
在导航学中,精度因子(dilution of precision,DOP)作为评估定位性能的重要指标,指测量误差放大至定位误差的倍数,与卫星的几何分布有关[18]。将其迁移至无人机集群定位系统中,也可作为集群定位性能的评估准则。根据本文状态向量形式,式(24)左右两边对角元素的关系为:
(25)
三维空间定位误差标准差定义为:
(26)
式(26)中,PDOP表示空间位置精度因子。
相应地,各方向上的精度因子计算如下:
(27)
式(27)中:(σX,σY,σZ)表示各方向上的定位误差标准差;XDOP、YDOP和ZDOP分别表示X、Y和Z轴方向上的精度因子。
5 仿真实验
5.1 基本数据
采用数值仿真方法对上述模型进行仿真实验。为便于分析观测时段内多种几何构型对相对定位性能的影响,假设主飞行器处于稳定飞行状态,从飞行器相对于领航无人机的初始位置为(20,30,20) m,在观测时段内其速度状态如表1所示。
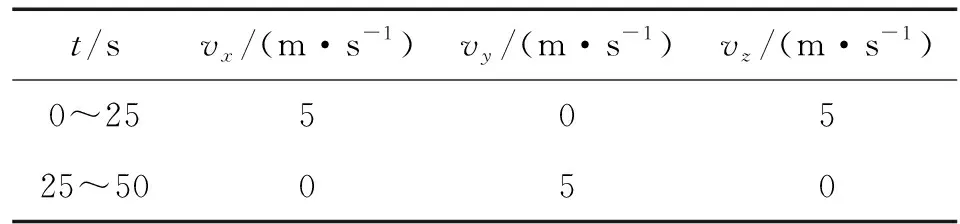
表1 各观测时段内速度参数Table 1 Velocity parameters during each observation period
已知每架无人机天线安装参数为a=1.0 m,b=1.0 m,且每个天线发射的电磁波波长分别为λ1=5 m,λ2=6 m,λ3=7 m。选取某一主飞行器机体坐标系作为其他无人机的导航坐标系,所有主飞行器均布置在边长为200 m的立方体顶点处,且姿态保持一致。仿真时间为50 s,每秒随机选择3架(RD-3MA)/5架(RD-5MA)主机进行观测定位,采样频率取20 Hz,分析观测时段内多构型融合对定位性能的影响。
5.2 初始条件
取初始时刻无人机位置状态误差为(-1.335 00, -1.621 60, -1.682 19) m,其位置初始协方差阵为 diag(1.873 06,3.147 71,3.703 52)。结合初始时刻飞行器姿态角与天线安装参数,可得3个天线状态参数组成的初始时刻状态向量与协方差阵。考虑相位量测值服从高斯分布,其转换至距离观测量噪声为0.15(3σ) m。利用迭代估值方法和扩展卡尔曼滤波算法,在初始条件下可估计出无人机位姿参数。
5.3 结果与分析
结合初始条件,从飞行器随机接收3架/5架主机的观测数据,利用迭代估值方法,可估计出飞行器在各自观测时段内的精度因子值和位置估值偏差,结果如图3—图8所示。

图3 各个时段主机观测情况(RD-3MA)
图3与图4显示了各个观测时段内主机观测情况。从图3与图4可看出,整个观测时段内,各主机被选中的概率基本一致,任意一架主机观测数据均可能作为从机的定位数据来源。

图4 各个时段主机观测情况(RD-5MA)

图5 各个观测时段DOP值(RD-3MA)
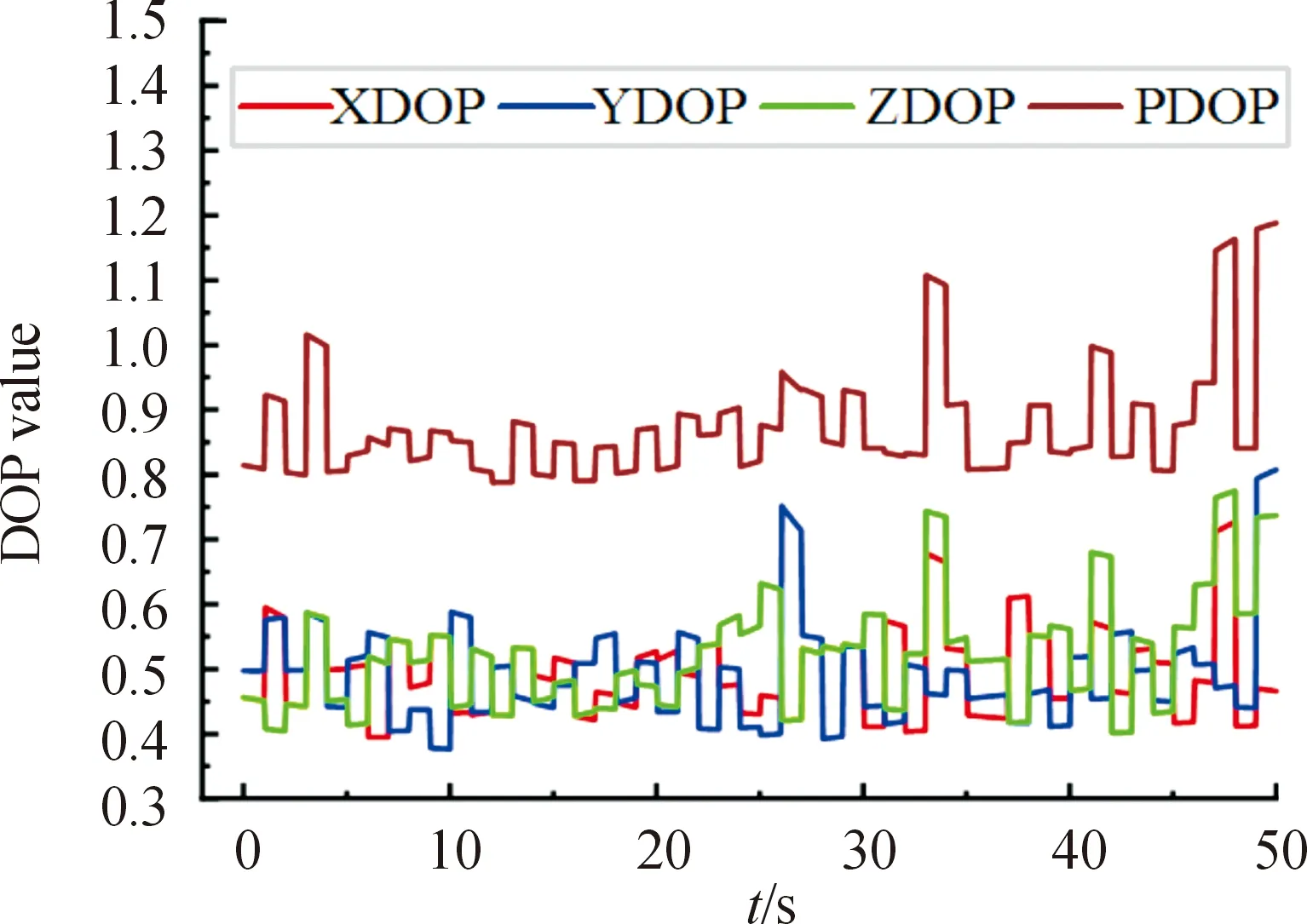
图6 各个观测时段DOP值(RD-5MA)

图7 位置估值偏差曲线(RD-3MA)
图5与图6显示了各个观测时段内精度因子值变化情况。从图5与图6可看出,RD-3MA策略下的DOP值存在剧增的情况,说明选取的3MA组成的几何构型不利于进行定位解算,会导致观测矩阵性质极度不稳定。而RD-5MA策略下各个观测时段的DOP值均较小,3个方向的DOP值均小于1,减弱了量测误差对定位精度的影响,提高了定位性能。图7与图8给出了观测时段内位置估值偏差曲线。从图7与图8可看出,RD-3MA策略在DOP值极高的观测时段,其位置估值偏差也较大,定位误差达到米级,而RD-5MA策略下的DOP值均较小,相应的定位精度较高,可获得厘米精度等级。
上述结果说明,随机选择5架主机可获得较为稳定的观测几何,其定位精度更高,在8架主机中,随机选取至少5架主机(RD-NMA,N≥5)进行观测定位,可估计出精度因子和位置估值偏差,结果如图9—图11所示。此外,利用蒙特卡洛进行100次实验,均方根误差变化曲线如图12所示。
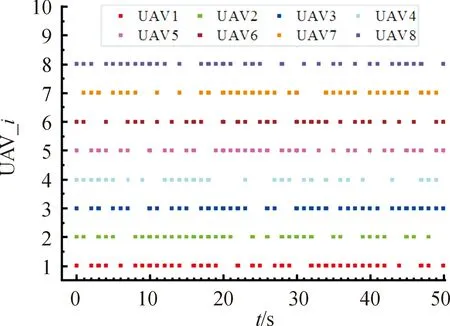
图9 各个时段主机观测情况(RD-NMA)
图9给出了各个时段内主机观测情况。从图9可看出,在整个观测时段内,共选取了271机次,比RD-5MA策略多21机次,对全部观测时段选用主机情况进行统计可知,各主机被选用的概率在10.7%~14.0%。图10给出了各个观测时段内精度因子值变化情况。从图10可看出,各方向上的DOP值均小于1,同样削弱了观测误差对定位精度的影响。此外,相比于RD-5MA选取策略,RD-NMA策略下DOP值小于0.4的次数较多,但总体相差不大,说明RD-NMA策略获得的几何构型相对较好,由于主机数量有限,使得效果提升不明显。针对大规模集群无人机执行飞行任务,RD-NMA策略理论上可显著提升定位性能,充分发挥集群内部个体的优势。图11显示了位置估值偏差曲线。从图10与图11中可看出,在DOP值稍高时段,位置偏差同步增大,与图8类似,其定位精度可达厘米量级。图12显示了位置偏差均方根误差变化曲线。

图10 各个观测时段DOP值(RD-NMA)
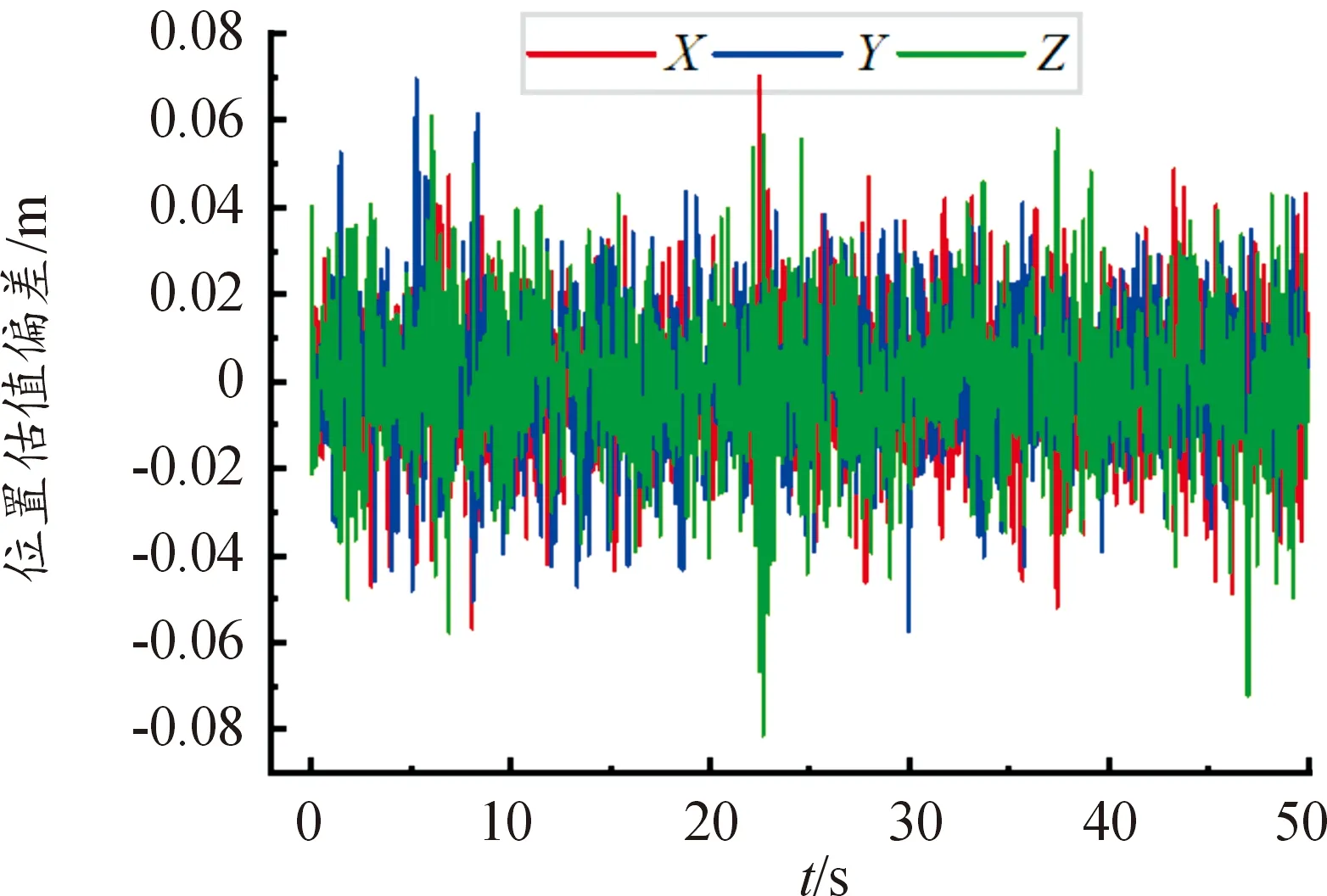
图11 位置估值偏差曲线(RD-NMA)

图12 位置偏差RMSE值(RD-NMA)
从图12中可看出,RMSE维持在较低水平,且随时间推移在较小范围内稳定波动,无剧烈震荡趋势。此外,对观测时段内的RMSE值进行统计分析,可知3个方向上的RMSE值均为0.017 m,三维RMSE为0.030 m,可以满足无人机集群相对定位精度要求。
在扩展卡尔曼滤波框架下,选取固定3架主机(UAV1~UAV3,ST-3MA)和随机3架主机(RD-3MA)进行滤波估计,可获得位置和姿态估值偏差,结果如图13—图16所示。

图13 位置估值偏差曲线(ST-3MA)

图14 位置估值偏差曲线(RD-3MA)
图13与图14显示了2种择机策略的位置估值偏差曲线。从图13与图14可看出,考虑了状态更新与观测更新的权重分配,2种择机策略均大大提高了状态估计精度,达到了毫米精度量级。相比于ST-3MA策略,RD-3MA策略可获得更高的定位精度,且收敛速度更快,其位置误差可收敛至±0.002 m。
图15与图16显示了2种择机策略的姿态估值偏差曲线。从图13—图16可看出,随着位置估计精度的提高,姿态估值效果也显著提升,RD-3MA策略的姿态角误差可收敛到±0.2°,可满足集群无人机相对姿态精度要求。将ST-3MA与RD-3MA2种择机策略的位置估值误差进行统计分析,其均方根误差统计结果如表2所示。

图15 姿态估值偏差曲线(ST-3MA)

图16 姿态估值偏差曲线(RD-3MA)

表2 2种择机策略的均方根误差
表2给出了2种择机策略的均方根误差统计结果。从表2可看出,相比于ST-3MA策略,RD-3MA策略在3个方向上的RMSE值分别减小了39.8%、65.7%和42.9%,三维RMSE则减小了50%,显著提高了无人机集群定位精度。
6 结论
针对大规模集群无人机相对定位问题,提出了随机择机策略进行观测定位,在传统精度因子基础上,提出了适用于本文定位方法的精度因子评估准则,结合滤波方法给出了高精度位姿状态估计,结果表明:
1) 随机择机策略实现了观测时段内的多构型融合,解决了单一构型限制,适用于大规模集群无人机飞行环境;
2) 随着观测主机数量增多,几何构型愈加稳定,精度因子无剧烈震荡变化,且均方根误差维持在较低水平,显著提高了定位精度;
3) 在扩展卡尔曼滤波框架下,随机择机策略可估计出稳定且高精度的位置状态信息,为相对姿态信息的高精度解算提供了重要依据。
猜你喜欢
军事文摘(2023年4期)2023-04-05
军事运筹与系统工程(2019年4期)2019-09-11
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
中国生殖健康(2019年8期)2019-01-07
测控技术(2018年4期)2018-11-25
电子制作(2018年11期)2018-08-04
中国交通信息化(2017年3期)2017-06-08
知识就是力量(2017年2期)2017-01-21
发明与创新(2015年33期)2015-02-27
