
仿生微型扑翼飞行器的研究进展
2023-04-03 08:46丁美希赵全亮马世伟刘志凯张萌颖何广平
兵器装备工程学报 2023年3期
丁美希,赵全亮,马世伟,刘志凯,张萌颖,何广平
(北方工业大学 机械与材料工程学院,北京 100144)
1 引言
地球数亿年的生命演化过程中,进化出了近百万种昆虫,它们拥有各自独特的飞行能力[1]。面对飞行生物,人类也表达出了对天空的渴望。通过一百多年来对飞行器的研究,目前广泛使用的飞行器主要为旋翼飞行器和固定翼飞行器,但随着飞行器的尺寸不断减小,传统飞行器的理论不再适用于微飞行器。1997年,美国国防预研项目局的McMichael首先提出了一种模仿昆虫翅膀扑动飞行的微飞行器,这种微飞行器的尺寸与昆虫相当,而它们都是依靠翅膀进行扑翼飞行的,可以实现低速飞行、悬停飞行等动作[2]。通过对昆虫飞行的研究,人们发现,与此前传统的飞行器相比,这种扑翼飞行器,不仅可以同时产生推力和升力,而且飞行效率更高,还不需要专门用于起飞降落的场地。所以,对于扑翼飞行器的研究越来越受到国内外相关人员的重视。
扑翼飞行器不仅可以产生稳定的升力,而且拥有更加优异的灵活性和机动性[3]。目前,对仿生微型扑翼飞行的机理研究已经为扑翼飞行器样机的研制提供了理论指导[4],并且国内外多所高校和研究机构成功试飞了多种仿昆虫扑翼飞行器。然而,这些扑翼飞行器普遍存在飞行控制欠缺、环境适应能力弱以及无法执行基本任务等问题,这主要是因为还没有形成比较完备的微型扑翼飞行机理理论体系[5],在结构设计、材料选择、驱动方式和自动控制等方面还存在巨大的创新空间。
本文中对近些年来仿生微型扑翼飞行器的研究成果进行总结,通过对昆虫飞行的高升力机理、不同驱动方式的仿生微型扑翼飞行器样机、典型微加工制造技术的论述,分析当前扑翼飞行器研究中存在的问题并对未来扑翼飞行器的发展趋势进行一定程度的预测和展望。
2 昆虫飞行的高升力机理研究
仿生微型扑翼飞行器的研究中,最重要的是仿生学运动机理。相较于旋翼和固定翼飞行器,扑翼飞行器不仅仅是体积的减小,在飞行参数上还有飞行速度、空气附面层作用、超低雷诺数的巨大差异,因此扑翼仿生学的发展与扑翼飞行器的样机制造几乎是同步的,得不到仿生学的理论支持也是扑翼飞行器发展缓慢的原因之一。
自然界中,虽然鸟类与昆虫都是依靠扑翼飞行,但在飞行方式和升力产生机制上却存在很大的差异。从雷诺数方面看,大多数鸟类飞行的雷诺数是105以上,昆虫飞行的雷诺数在103~105,甚至个别微小昆虫的雷诺数会低至10。随着扑动翅膀的尺寸减小,空气的粘附作用则会越明显。因为昆虫的翅膀要比鸟类小很多,所以它们需要通过提高翅膀的振动频率来减小空气粘附对飞行的负面影响;从翅膀形状上看,和昆虫的扁平翅比较,由于鸟类的双翼具有特定的弧度,所以产生的升力会更大,而且鸟类的翅膀分为内翅和外翅,在飞翔时内翅充当固定翼飞行器两翼的功能,会持续产生升力,外翅相当于昆虫翅膀的作用,因此飞行效率会高很多;从内部结构上看,鸟类的翅膀由大量羽毛、血管、神经、肌肉组织和骨骼等组成,能完成闭翅和张翅的动作。当翅膀上拍时羽毛打开使空气流过,从而减小阻力,下拍时羽毛闭合,从而获得更大的升力。昆虫的翅膀由翅膜、翅脉、翅梁组成,没有鸟类翅膀的复杂结构,因此只能通过高频振动来维持飞行;从驱动方式角度看,鸟类大多通过翅膀上发达的飞行肌肉主动控制翅膀形状,很少会做高频率扑动,昆虫的飞行肌肉主要集中在翅根部,除少数多翅昆虫外,大多数昆虫的翅型很难改变,因此多为被动控制,而且得益于薄膜结构轻薄的特性,昆虫的翅膀很容易随气流产生高频共振。同时,昆虫飞行时可以产生很高的升力,这种升力保证了昆虫可以稳定飞行、快速升降高度、悬停和快速转弯。对于昆虫飞行时升力来源的研究,主流的观点有拍合机制、延时失速机制、翻转机制和尾迹捕获机制等4种机制。
2.1 拍合机制
根据Weis-Fogh等[6]对小黄蜂的研究,认为拍合机制是大部分昆虫产生升力的原因。此后,Lehmann等[7]通过对黑腹果蝇建立等效动态力学模型,验证了Weis-Fogh的研究结论;Sun[8]采用粘性流体方程模拟的方法对拍合机制进行研究,验证了前缘涡产生平动升力的机理。
拍合机制如图1所示[9],在初始位置上,2个翅膀紧靠在一起,之后围绕各自的后缘匀速转动,2个翅膀逐渐分开形成空隙,流体进入空隙产生旋涡进而迅速产生低压区,翅膀进一步打开因而产生了瞬间的高升力。当两翅彻底分开的同时,前缘带动翅膀靠近挤出空气,完成一个拍动周期。还有研究表明[10],拍合机制需要面积大的翅膀和大拍动幅度才会比较明显,比如蝴蝶。对于研究比较多的果蝇来说,它只有在进行吊飞的时候才会采用拍合机制,在自由飞行时几乎不会采用。根据斜板效应理论,只有倾斜的平板才会有高升力、低阻力的特性,若将昆虫的翅膀振动看作垂直运动的平板,在高频反复开合的过程中由于阻力较大,实际消耗的能量会大大提升,导致飞行效率下降。
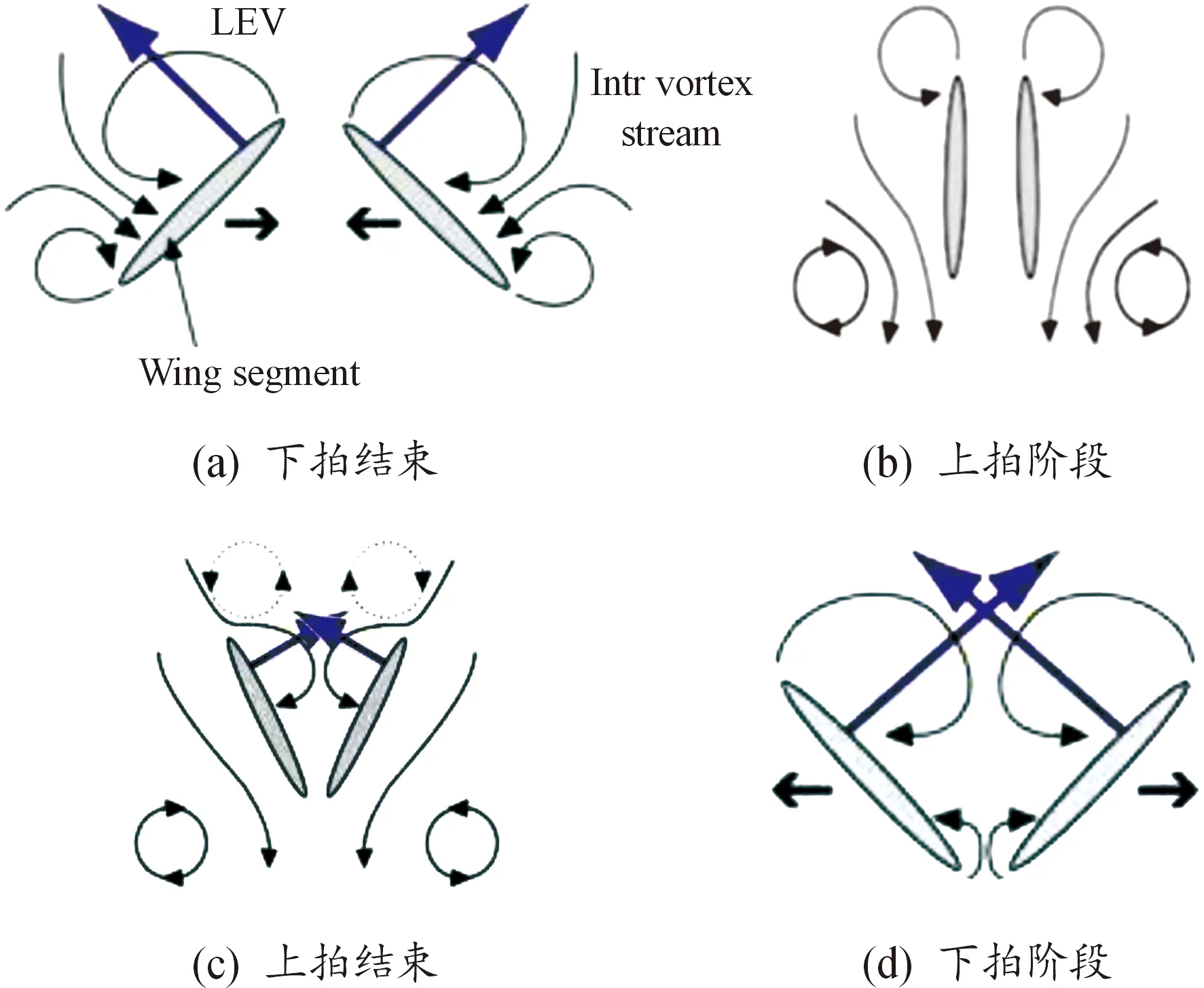
图1 拍合机制
2.2 延时失速机制
根据Ellington等[11]的实验,天蛾扑翼飞行时由于前缘涡的延时失速产生了升力。在翅膀拍动时,会产生2个前缘涡,第1个在下拍的初始阶段产生并在翅膀向内扭转结束时消失;在下拍即将结束时,翅膀转动攻角开始增大,导致了第2个前缘涡的产生,但由于下拍时间短,第2个前缘涡在翅膀失速前没有消失,一直持续到下拍结束。为验证这一机制,Thomas等[12]对蜻蜓的飞行机制进行了研究,如图2所示。图2(a)在上扑时翅膀顶部可以看到扑动时的尾流,图2(b)在向下扑动时2个前翅之间会形成2个漩涡,图2(c)在经过中间位置继续向下扑动时2个漩涡会延迟扩展到翅膀上,图2(d)在下扑结束时2个漩涡会逐渐消失。结论表明,蜻蜓的飞行正是采用了延时失速机制。
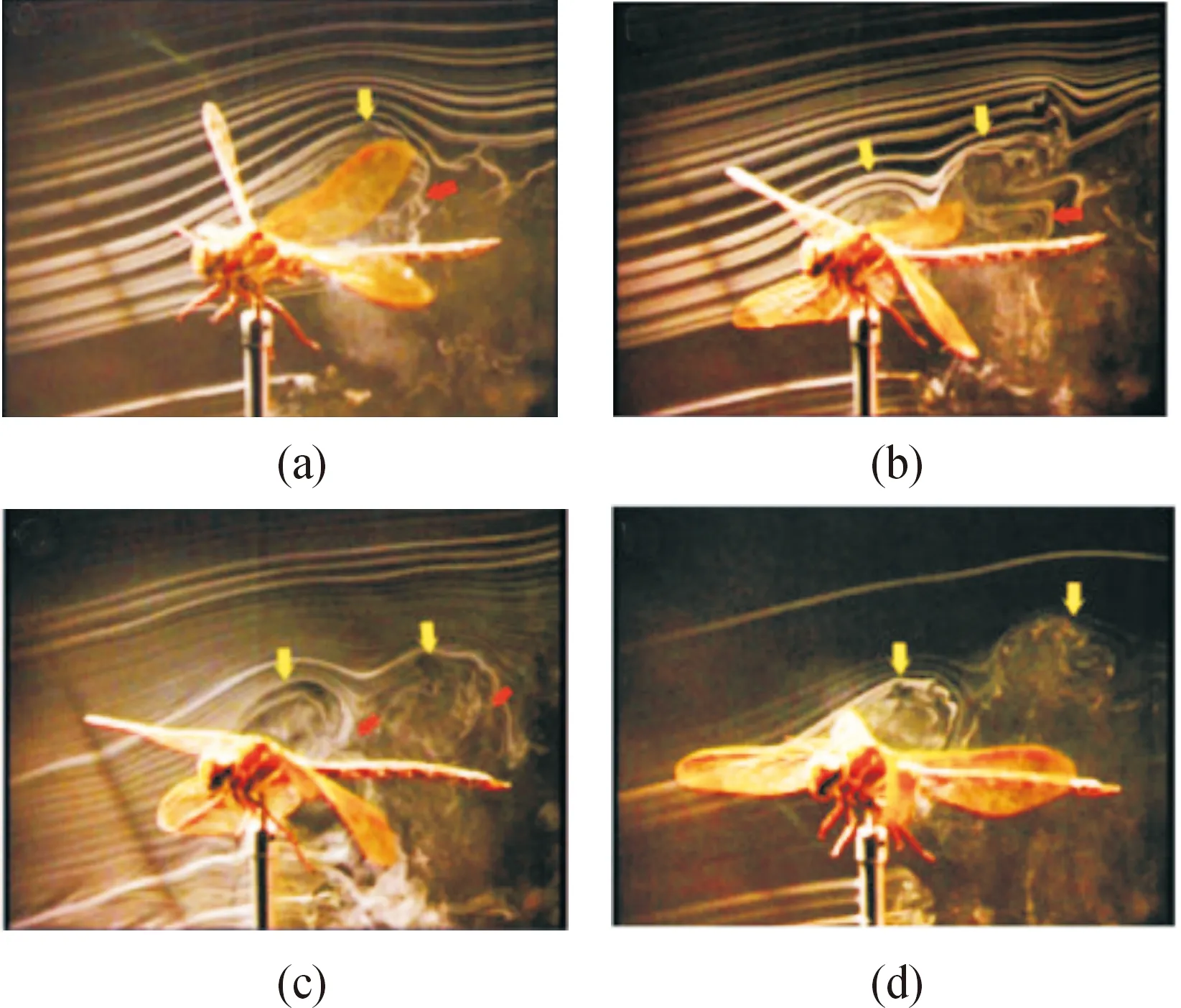
图2 延时失速机制
2.3 翻转机制
Dickinson等[13]进行风洞实验和昆虫吊飞试验时,通过力传感器测量发现:昆虫在翅膀上下拍动的转换期间存在一个明显的升力峰值,期间平动速度较小,延时失速机制并不能解释这个现象,因为这种升力的增加是翅膀的翻转产生的。如图3所示,在翅膀开始反向扑动时,通过减小平动速度来抵抗前方的来流,并阻止升力快速降低。
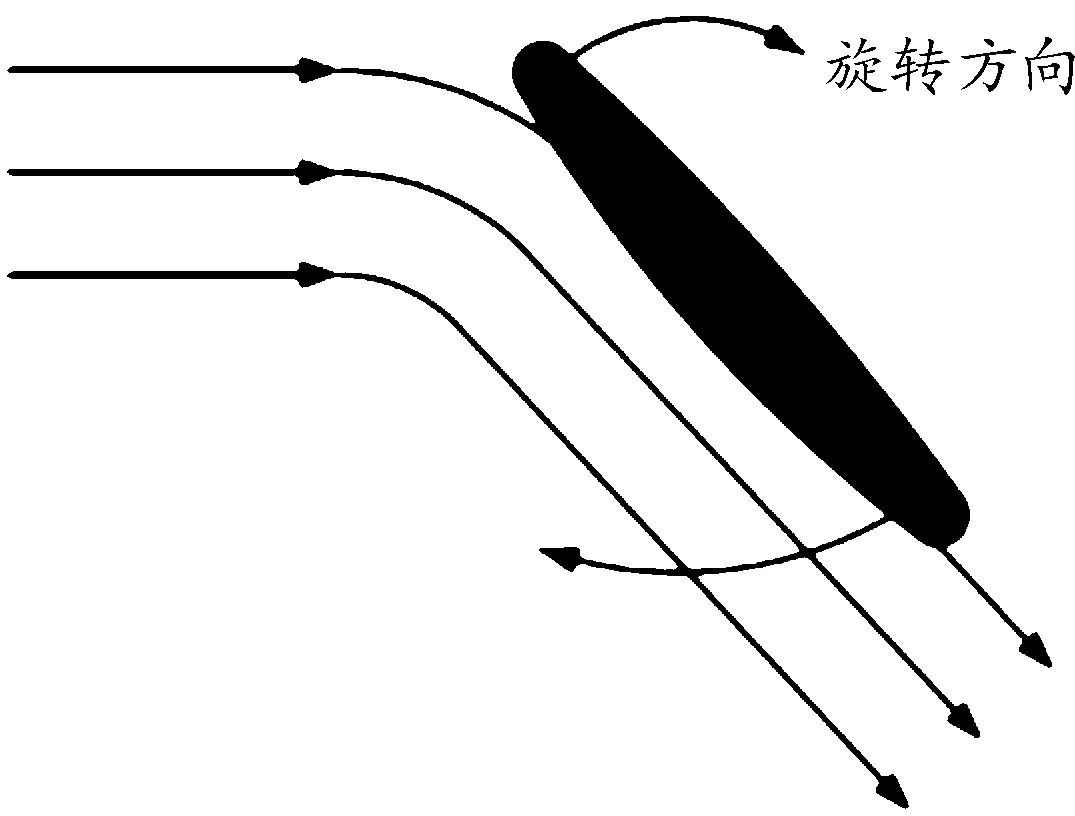
图3 翻转机制
2.4 尾迹捕获机制
昆虫的每一次扑动都会残留一部分尾流,当昆虫翅膀在上扑和下扑转换时,前一次拍动产生的尾流还没完全消失,翅膀就快速改变角度,与此前运动的流体发生相对运动,空气流速加快,会捕获一部分损失的能量。根据Dickinson等[13]对昆虫在油中飞行的模拟研究表明,如图4所示[14],仅由攻角产生升力无法获得大于昆虫重力的升力,但是在尾迹捕获机制和翻转机制的共同作用下,就会在一个扑动周期内产生2个升力峰值,以此达到了飞行的目的。尾迹捕获机制在昆虫悬停时比较明显,当昆虫在快速飞行时,翅膀能捕获的气流很少,尾迹捕获机制的作用不明显。

图4 尾迹捕获机制
3 仿生微型扑翼飞行器驱动方式研究
3.1 电机驱动
电机驱动因其成熟的发展成为了多数扑翼飞行器研究的选择。虽然因电机尺寸的限制,由电机驱动的扑翼飞行器普遍体积较大,但电机带来了更大的负载能力,可以使飞行器携带更多的传感器,实现更多的功能。从2005年开始,荷兰代尔夫特理工大学Croon等人先后研制出了五代仿蜻蜓Delfly系列样机[15-18]。该系列样机的特点是利用电机驱动齿轮-连杆传动机构带动X型机翼做前后往复运动,保证了在相同翼展面积的情况下飞行器的能量功耗更小、稳定性更好。飞行器还装备机载摄像头,并应用高速相机动态捕捉技术实现飞行器的位置控制。2013年他们[19]又研制出了Delflyexplorer扑翼飞行器,使用电磁线圈替换电机,通过减轻质量获得了更好的气动性能,从而可以携带更多负载,同时在原样机的基础上又添加了避障功能,成为世界上第一个可以自主飞行的仿昆虫扑翼飞行器,并依靠自身的立体视觉系统可自主飞行9 min。2018年他们[20]从果蝇飞行中得到启发,利用成像控制方式,对Delflyexplorer样机进行了优化,研制了仿果蝇扑翼飞行器,如图5所示[20]。
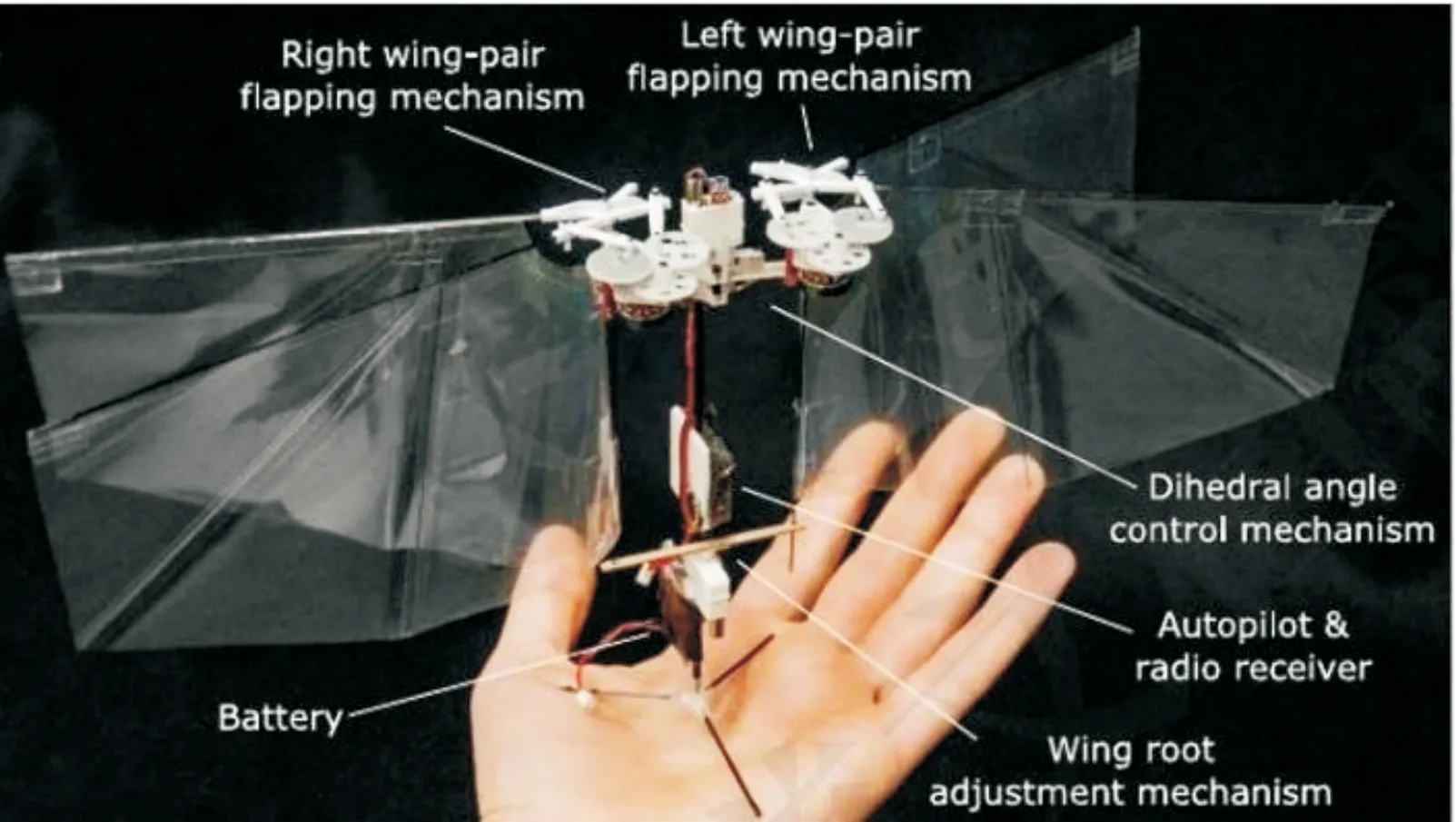
图5 仿果蝇扑翼飞行器
为了稳定空间飞行姿态,该飞行器增加了一个2.8 g微型自动驾驶仪,并配备了一个可编程的微型计算机和姿态估计传感器。优化后的飞行器质量为28.2 g,翼展为33 cm,盘旋时翅膀拍动频率约为17 Hz,电池充电一次可以维持5 min的悬停或超过1 km距离的飞行。在研究果蝇飞行时发现,该飞行器在快速倾斜转弯时的被动运动会产生偏航力矩耦合,这种修正偏航的旋转运动可将飞行器推向有效转弯所需要的逃逸航向,产生俯冲规避等动作。
2015年,普渡大学的Deng等[21]研制了一款仿蜂鸟扑翼飞行器,如图6所示。它实现了对每个翅膀的单独控制,翅膀的轴与弹簧结构连接,不仅可以储存能量,还可以实现系统共振。研制过程中,为了实现翅膀的瞬态轨迹跟踪,通过建立飞行器系统动力学模型,证明了自适应鲁棒控制可以实现对频率、振幅等参数的跟踪。2016年,他们制造了质量为7.5 g,翅膀振动频率超过30 Hz的仿蜂鸟扑翼飞行器,实现了飞行和力矩控制。该飞行器是基于单向电机上额外的伺服机构来驱动控制飞行的,此系统的无系留集成系统相对简单,在载荷和质量上都有特定的限制。2020年Deng等[22]又对飞行器的控制器和原型样机优化了控制带宽和权限,提升了质量比,也对完整的系统模型、机翼驱动动力学、机身动力学、机械限制和电气约束进行了分析,并对整体系统和每个子系统进行了试验验证,解决了独立控制翅膀和不同设计约束之间的权衡问题,最终样机翼展170 mm、质量为20.4 g。该样机采用直流电机驱动装有扭转弹簧和减速齿轮的机翼,并且增加了一个定制的直流功率调节器连接驱动电路,以适应尺寸、质量和功率的限制,在无系留飞行过程中保证了飞行稳定性,大大提高了飞行效率,在悬停和载重(超过飞行器本身质量60%)的情况下表现出了持续稳定的飞行。2021年他们[23]将强化学习(RL)控制理论纳入到传统的控制稳定器中,在原型机的基础上增加了快速逃逸和360°身体翻转的攻击性动作,使得飞行器的飞行能力更加接近自然界中蜂鸟的复杂飞行性能,在处理突发状况问题上更有效。
2015年韩国建业大学Park等[24]研制了一款仿甲壳虫无尾扑翼飞行器,如图7所示。该飞行器包括2个线性伺服器、1个电池和远程控制电路,质量约15 g,可以产生20 g的推力,翅膀拍动的频率为22 Hz。扑翼机构的设计结合了四杆机构和齿轮传动机构,将电机旋转运动转换为高达190°的扑翼运动,同时在顶部和底部安装2套固定稳定器实现远程控制飞行。但是该飞行器的运动不稳定,飞行时间只能在30 s左右。2016年他们[25]在原来样机基础上对飞行控制器进行优化,利用一种控制力矩发生器来控制扑翼同时产生飞行力和控制力矩。通过控制电机,扑翼飞行器可以独立地使每个机翼的冲程平面倾斜15°。控制力矩发生器可以改变冲程平面产生合理的俯仰和偏航力矩,使机翼根部后缘位置产生滚转力矩,并采用远程控制实现了飞行器的可控飞行。2020年他们[26]又对甲壳虫碰撞恢复机制进行了研究,样机如图8所示。飞行器翅膀借鉴甲壳虫的可折叠翼原理,在上机架中间位置增加了碳纤维弯曲关节,如图9所示,将后翼安装在扑动机构的输出连杆上,以180°左右的振幅进行扑动,柔性铰链扭转能够引起机翼的变形。这种设计使得飞行器可以实现在飞行过程中翅膀碰撞障碍物后恢复飞行的能力,极大提高了飞行器的飞行稳定性。

图8 具有可折叠翼的仿甲壳虫飞行器

图9 飞行器机翼的设计结构
3.2 压电驱动
压电驱动器主要利用压电材料的逆压电效应,即在材料的极化方向上施加电场使材料发生形变,从而实现往复运动。2011年哈佛大学微机器人实验室Wood等[27]研制的仿昆虫系留扑翼飞行器(FMAV),如图10所示,质量约60 mg,翼展约为3 cm,在压电双晶片驱动器下首次实现了沿垂直轨道攀升。该扑翼飞行器的结构简单,主要由一个压电双晶片驱动器和2个四杆传动机构组成。其中,四杆传动机构的柔性铰链是由碳纤维-聚酯膜-碳纤维三层材料复合而成。外置电源产生的输入信号经由传动机构输送到机身与两端机翼,使双侧机翼实现同步拍打运动,拍打幅值约±60°,扭转幅值±45°,共振频率为110 Hz。机翼尖端位移基于柔性的四杆传动机构放大,沿φ轴主动旋转产生惯性力,影响沿θ轴的被动旋转,使得机翼拍打过程产生非零仰角,从而产生约为其自身重力3.6倍的升力。但是,由于只采用了一个压电驱动器控制两侧对称拍打的机翼,并且集中控制单个高度自由度,不能实现空间多自由度的控制,因此无法满足空间多自由度飞行的需求。
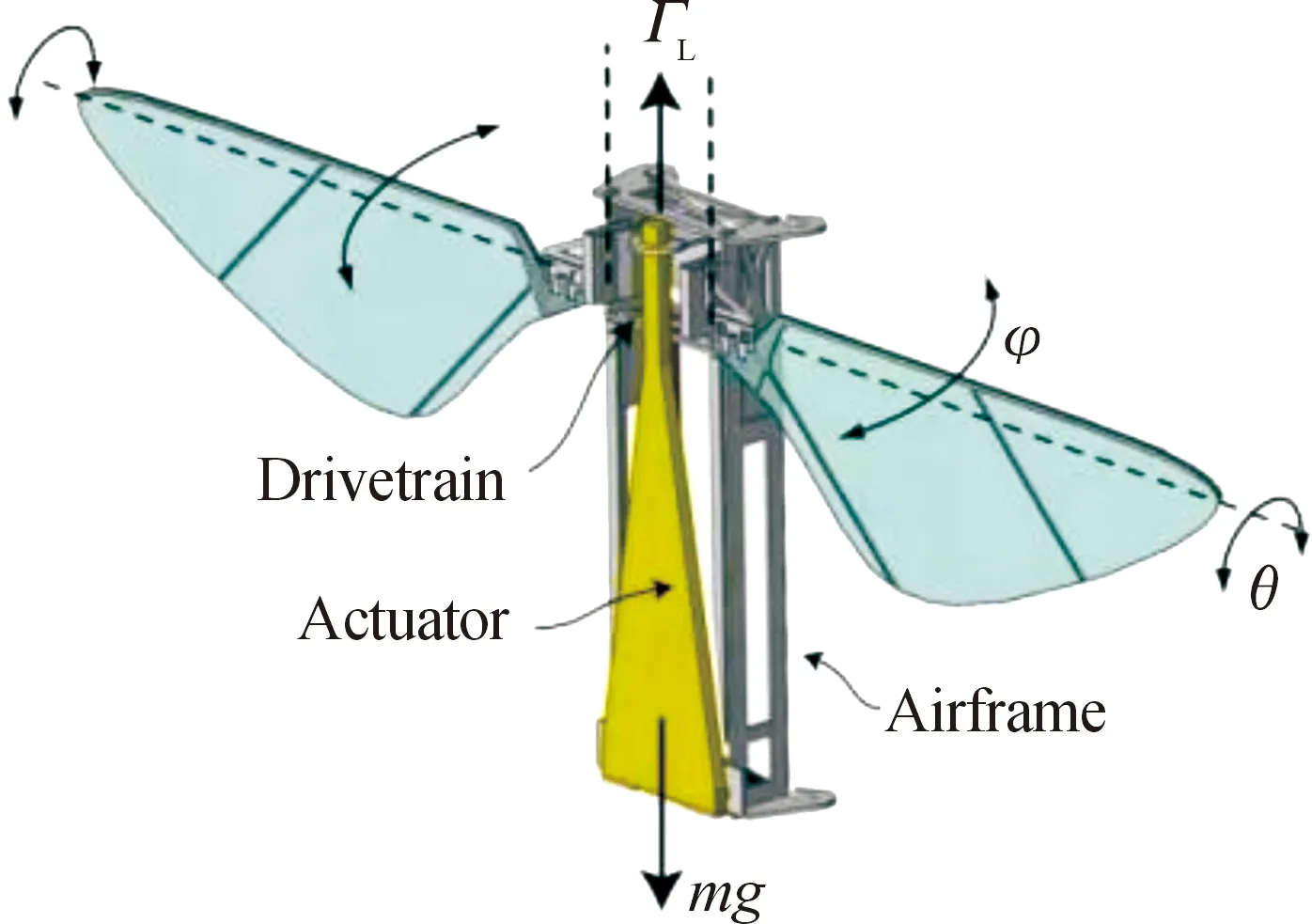
图10 扑翼飞行器翅膀扑动机制
2012年Wood等[28]又在FMAV的基础上进行了优化,利用恒定频率控制飞行的同时,为双机翼各自配备了一个压电双晶片驱动器,使每个翅膀可以独立驱动并微调振幅,从而产生滚转、俯仰和偏航力矩来实现悬停、平移等运动姿态。这种微型扑翼飞行器质量70 mg,峰值升力可以达到1.3 mN,如图11(a)所示。但是,为了实现较好的对称和重复飞行能力,使用2个压电驱动器大大增加了飞行器的复杂程度,并且由于要求2个机翼扑动保持与系统相同的共振频率,从而达到最大的工作效率,致使飞行稳定性不高。2014年他们[29]进一步优化了这种微型扑翼飞行器,采用了Lyapunov直接法,提出稳定的自适应控制系统。与在真实昆虫中观察到的更复杂的机翼运动学相反,该控制器使用简化的机翼运动学,提高了飞行效率并降低了飞行误差。
2016年Wood等[30]又利用静电黏附机制提出一种质量约13.4 mg的可附着微型扑翼飞行器,如图11(b)所示。其顶部集成安装以聚酰亚胺薄膜为衬底的圆形铜电极,几乎可以在任何材料表面上诱导产生相反电荷,从而与之产生静电吸附力。但是,由于静电吸附力较小,该飞行器的有效载荷不高,并且受到质量和大小的限制,无法携带自主操作需要的电源和传感器。针对此问题,2020年他们[31]又研制了一种无系留的微型扑翼飞行器,如图11(c)所示。该样机质量约90 mg,使用4个翅膀提高了约29%的气动效率,机身附加的微型光伏电池阵列和驱动电路使其可以去除外接电源实现无限制一体化飞行。但是,由于有效载荷能力有限,增加了集成机载电子电源和电路后,能耗增大,只能支持0.5 s左右的有效飞行。上海交通大学也在FMAV的基础上将单个机翼设计优化为仿生往复机翼,如图12所示[32],制造了具有压电双晶片驱动的4个质量为247 mg的仿生柔性往复翼,机翼对称分布在飞行器的对角线上,在134 Hz谐振频率下,产生了23.5°的往复角,飞行效率较大,也增加了有效载荷。

图11 哈佛大学研制的扑翼飞行器

图12 仿生往复翼微型飞行器
2021年日本丰田实验室Ozaki等[33]研制了一个无线射频电源驱动的微型无系留扑翼飞行器,如图13所示。该样机车身采用6个机翼和6个执行器,6个机翼分为3组成对驱动,在降低震动能量损失的同时提高升力。与哈佛大学集成光伏电池阵列和驱动电路的无系留飞行器相比,该样机采用了一个亚克射频功率接收器,该接收器的功率质量密度约为4 900 W/kg,比类似质量的锂聚合物电池高5倍左右,解决了轻型高功率密度电池的限制,最终样机获得的总升力约为2.4 gf,质量约为1.8 g,相比同类型的微型飞行器轻25倍多。
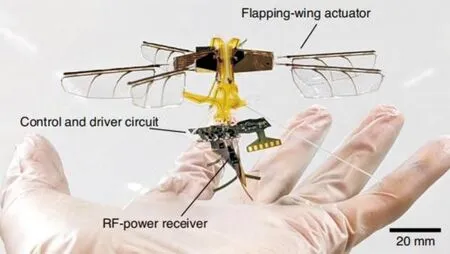
图13 带有射频功率接收器的飞行器
3.3 电磁驱动
随着微机电系统(MEMS)技术的成熟,电磁驱动器凭借着体积小、质量轻的优点逐渐代替了传统电机,作为仿生微型扑翼飞行器的动力源。图14为单线圈、双线圈的驱动扑翼飞行器。
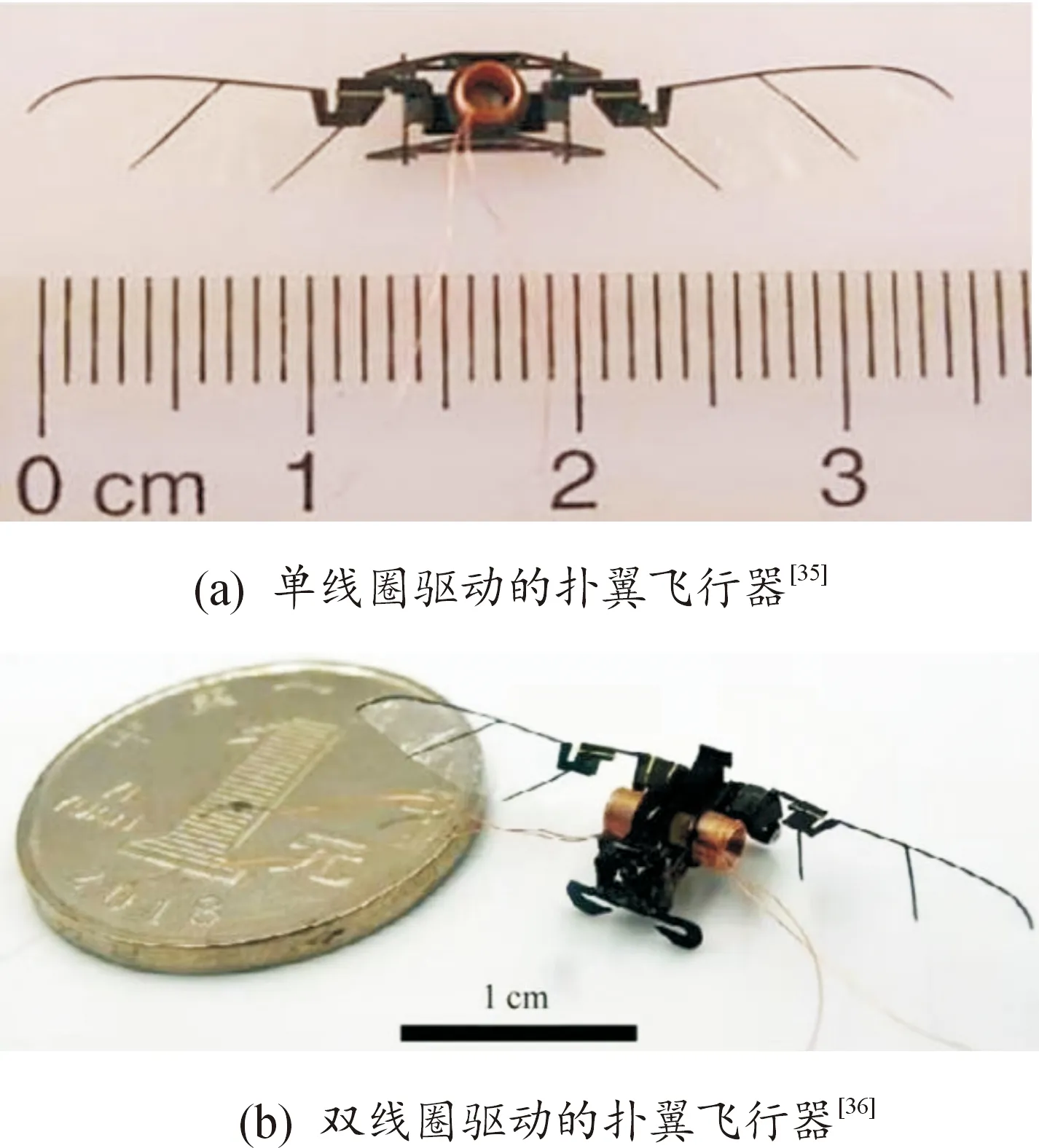
图14 单线圈、双线圈驱动扑翼飞行器
2016年,上海交通大学Zhang等[34]利用紫外激光和智能复合微结构(SCM)工艺研制了翼展35 mm、质量为80 mg、扑动频率80 Hz的仿昆虫扑翼飞行器,如图14(a)所示[35]。其扑动角度达到了70°,可以克服重力起飞。但是,由于使用单一驱动器,不能产生偏航和翻滚力矩,只能沿着导轨垂直上升和悬停飞行,无法实现空间多自由度可控飞行。2020年他们[36]利用2个背靠背放置的电磁驱动器以独立驱动2个翅膀,解决了只能控制单一高度自由度的问题。该样机质量为96 mg、翼展3.5 cm,如图14(b)所示,通过球面四杆机构传输,产生了调制俯仰、滚转和偏航的3个控制力矩,实现了空间多自由度系留飞行。但是为了机器人的可控飞行,还需要对飞行器的空气动力学、机器人的系统动力学进行更详细的建模,在微电源、微传感器、飞行效率优化等方面进行探索。
3.4 介电驱动
介电弹性体驱动器(dielectric elastomer actuator,DEA)是介电驱动器的一种,它由上下两面的电极夹住中间的介电弹性体组成,当向电极加载电压时,两侧极板产生麦克斯韦应力相互吸引,中间的介电弹性体受到压缩,从而将电能转化为机械能。DEA与传统压电、电磁等驱动器相比,具有变形量大、质量轻等优点,在扑翼飞行器领域展现出巨大的应用前景。2019年,哈佛大学Chen等[37]利用预应变多层丙烯酸DEA驱动器来驱动仿生微型扑翼飞行器,如图15(a)所示。这种致动器质量为100 mg,峰值功率密度600 W/kg,可以实现大于30%的应变量和大于4 J/kg的能量密度,同时使用了硅弹性体作为飞行器的介电材料来提高带宽(>400 Hz)。如图15(a)所示,DEA放置在轻型机身中,并通过连接到两端的四杆机构将DEA的收缩运动转化为飞行器两翼的同步扑翼动作,这种设计可以避免使用刚性支撑结构,从而减轻质量。这种模块化的飞行器可以进行灵活组装,如图15(b)所示,每个扑翼模块质量为115 mg,通过将多个DEA集成到一个扑翼机构中产生系统共振,消除了因非线性转换引起的高次谐波,并突破了单个DEA功率密度过低(<200 W/kg)导致扑翼飞行器无法起飞的限制。最终,该扑翼飞行器产生了自重1.2倍(1.8 mN)的净升力,在300 Hz、1 300 V驱动条件下,该DEA功率密度为300 W/kg,还有超过600 000次的寿命,可以使扑翼飞行器实现稳定上升和受控悬停飞行。同时还通过感知与障碍物的相互作用,利用自身材料的坚固性和柔韧性从碰撞中恢复飞行。
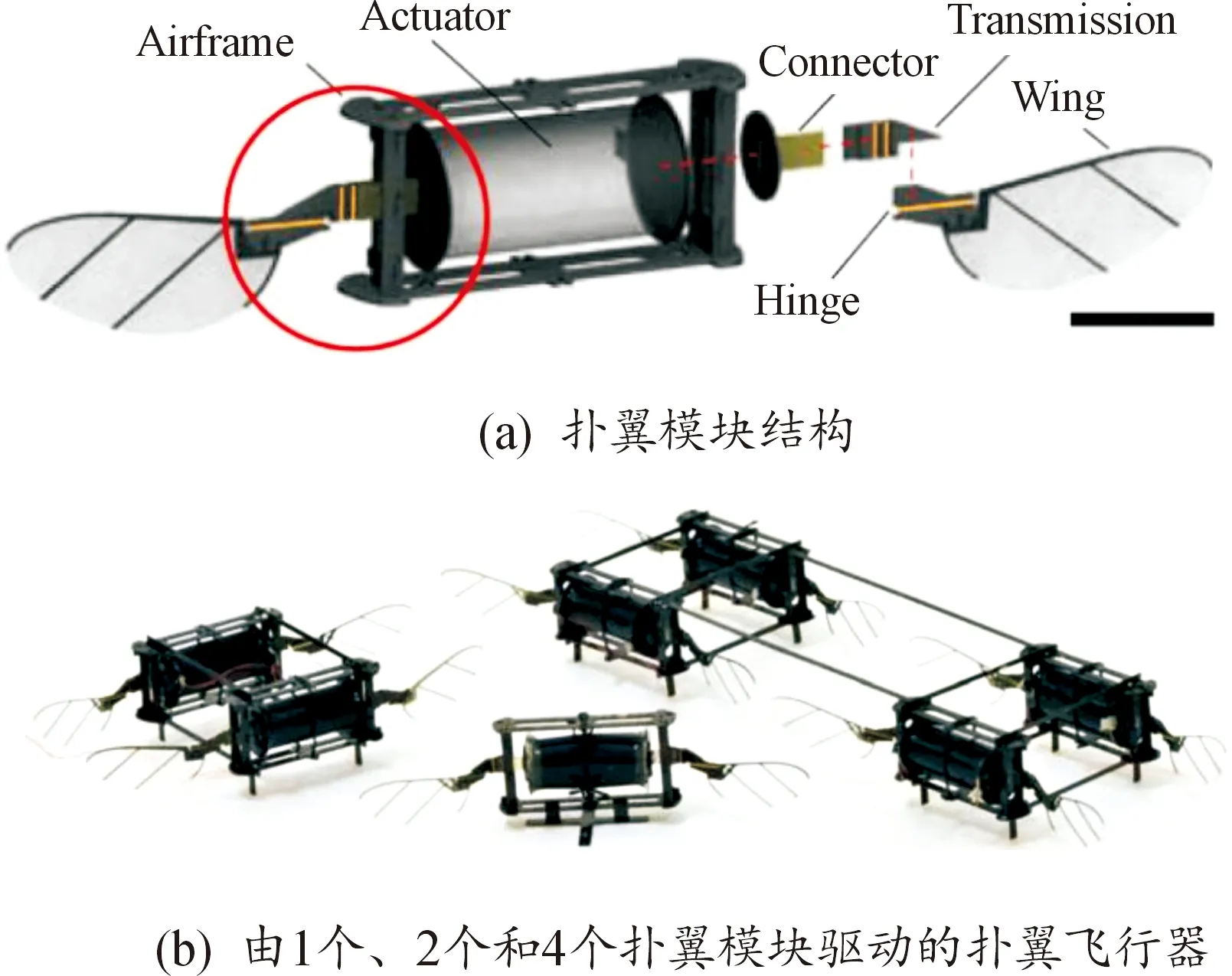
图15 DEA驱动的微型扑翼飞行器
2021年,Chen等[38]又改进了此前的微型扑翼飞行器并研制了一款665 mg的MVA。这项工作主要是对DEA驱动器进行改进,扑翼飞行器的整体结构保持不变。该研究团队通过对弹性体材料的研究,发现弹性模量的提升会导致功率密度的提升,于是采用拥有更大弹性模量和更高介电常数的介电弹性体(Elastosil P7670)材料,在更高的共振频率下实现了更大的位移量(2 mm)。同时该介电弹性体在做得更薄(30 μm)的情况下,使DEA的功率密度和转换效率分别提升了100%(600 W/kg)和560%(37%),净升力提升了83%。改进后扑翼飞行器的上升速度也达到了70 cm/s并保持16 s的悬停飞行,在受到碰撞时,不仅可以通过自我感知的鲁棒性恢复飞行姿态,甚至还能进行类似翻跟头的激进机动动作。
由于DEA的驱动电压高达几千伏,应用于微型扑翼飞行器受到的限制较多,但是可以通过制作超薄介电弹性体薄膜来降低驱动电压。2022年,Chen等[39]又对此前的扑翼飞行器进一步优化,在外形不变的基础上,利用多层制造方法将DE薄膜的厚度降低到10 μm,并增加堆叠层数至20层,在保持高功率密度(>500 W/kg)条件下进一步降低驱动电压至小于500 V。与此前6层DE薄膜相比,20层DE薄膜的净升力提升了60%,寿命提升至200万次。最终,该扑翼飞行器的悬停时间也达到了20 s。尽管DEA的研究已经取得了进一步发展,但相比压电、电磁驱动的扑翼飞行器,DEA主要使用的多为柔性电极材料,这也带来了效率较低的问题。未来的研究方向是通过改善柔性电极材料的均匀度和紧密粘合度来降低电极的能量损耗。
此外,2022年布里斯托尔工程学院的Jonathan等[40]也提出了一种介电驱动器——液体放大拉链驱动器(liquid-amplified zipping actuator,LAZA)——驱动的微型扑翼飞行器,它不需要额外的传动系统,极大地减轻了整机的质量,如图16所示。图17为LAZA驱动器,它由一对带有绝缘层的固定电极、一个活动机翼电极和中间的液态电介质组成。为了提高中间液态电介质的介电常数以免被击穿,他们采用了硅油充当电介质。它利用了液体放大静电拉链原理,将静电力集中到一个移动拉链点上,不仅产生巨大的形变量(>99%),对比能量的提升也十分可观(6.88 J/kg)。当功耗为243 mW时,可以产生5.73 mN的净推力,并持续进行 0.71 m/s的水平飞行。实验证明,LAZA在50 Hz的扑动频率下,经过100万次的循环后,该飞行器扑动幅度没有明显变化。LAZA作为一种新型驱动器,与DEA相比,有结构简单、质量轻、噪音小、成本低的优势;与上述DEA驱动扑翼飞行器相比,LAZA驱动的扑翼飞行器可以独立控制扑动频率、扑动幅度,实现对姿态和位置的精确控制。但是,目前LAZA驱动的扑翼飞行器的推力质量比仅为0.114,无法实现垂直起飞,未来对于LAZA的研究将会集中在通过改进电极材料、液态电介质来提高静电力并降低自重。

图16 LAZA扑翼飞行器

图17 LAZA的结构 Fig.17 The structure of the LAZA
综上所述,不同驱动方式的微型扑翼飞行器性能对比如表1所示。电机和电磁线圈驱动方式是与传统宏观驱动原理比较接近,适合应用于尺寸较大的微型扑翼飞行器,负载和无系留自治飞行能力较好,但不利于微型化设计,并且功耗较大。与之相反,压电和介电功能材料驱动方式更加适合应用于毫克级质量和更小尺寸的微型扑翼飞行器,功耗也非常低,但是负载和无系留自治飞行能力较差。
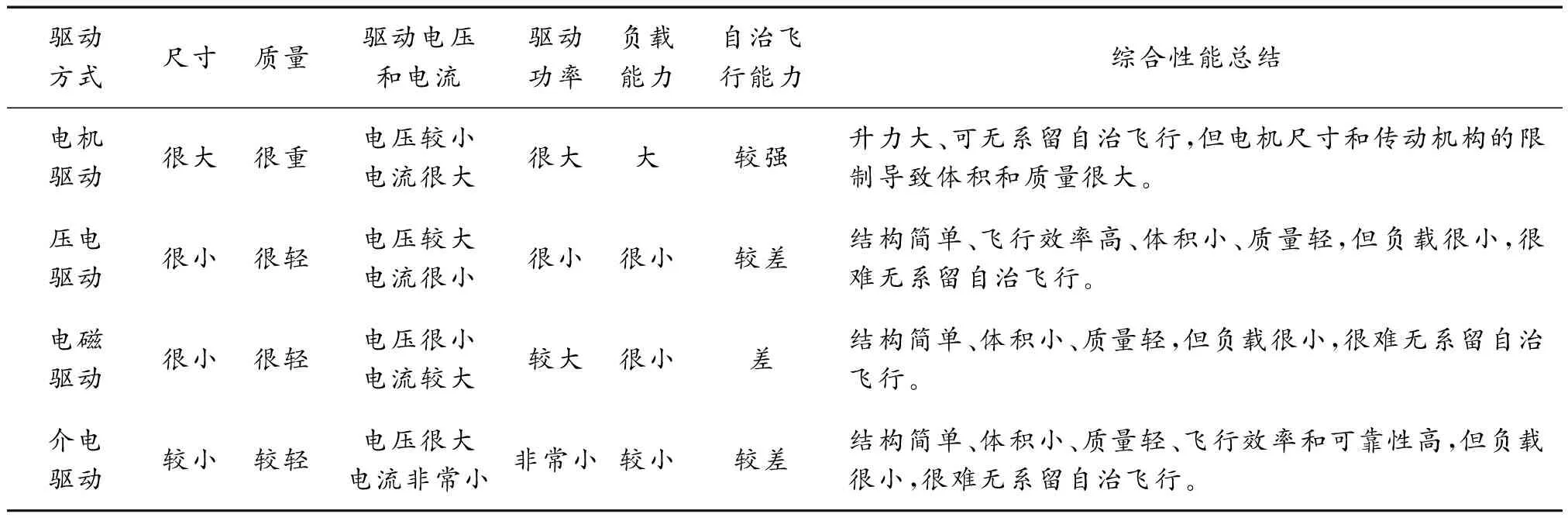
表1 不同驱动方式的微型扑翼飞行器性能对比Table 1 Comparison of bionic flapping wing micro-aircrafts with different driving methods
4 智能复合微结构(SCM)加工工艺
由于微型扑翼飞行器整体尺寸较小,因此对自身结构和材料的综合要求非常严苛。目前,碳纤维材料因其质量轻、强度度、易于微加工等特点,已广泛应用于各类扑翼飞行器中。然而,基于传统机械制造技术存在精度差、效率低等问题,很难实现有效的毫米/亚毫米级轻量化加工,使微型扑翼飞行器的进一步微型化受到阻碍。针对这些问题,哈佛大学微机器人实验室Wood和加州伯克利分校Fearing等[41]花了十多年的时间来设计弥补这一技术差距的方法,提出了SCM加工工艺,为微型机器人的设计制造提供了一种可行方案。其中最为典型的包括柔性铰链和折叠结构的制作,这种多层材料的平面加工替代了难度大的三维结构加工,使加工出的微型零部件更加精细,也使得零件批量化、大规模生产成为可能。
4.1 SCM工艺的典型制造流程
传动机构以柔性铰链和连杆结构为基础,整体尺寸和特征尺寸的要求非常精细,其中柔性铰链在传动机构中起到“转轴”的作用,而折叠结构用于平面形状到三维形状的转化[42]。
柔性铰链的典型SCM工艺制造步骤如图18所示。首先将未固化的碳纤维预浸布层压,之后进行激光加工刻出毫米级/亚毫米级的缝隙,再将聚酰亚胺膜放置在层压板上后加热固化至碳纤维板,并将其对齐到另一碳纤维预浸布层压板上,对齐后重复固化过程,最终做出具有柔性弯曲铰链的平面结构。柔性铰链的设计方法提供了一个可以大范围运动的柔顺弯曲关节,其他刚性接头和柔性接头的结构都可以应用这种无摩擦、无间隙、无磨损的制造方式[41]。这种制造方式把平面结构折叠成一个完整的三维柔性铰链结构,可以应用到微型扑翼飞行器的四杆传动机构中。
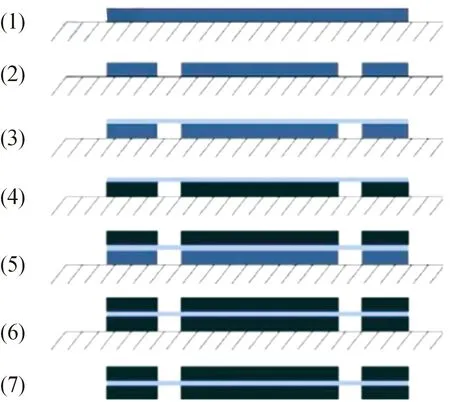
图18 SCM制造工艺
折叠结构制造加工与柔性铰链加工过程类似,如图19所示,最关键的部分是用于锁住直角锯齿结构,在切割完缝隙后,按照预先的设计折叠成直角,并使用瞬干胶粘住[43]。当传动机构需要折叠时,在折叠方向切割出一条直线缝隙,反方向的碳纤维板则切出锯齿状缝隙。

图19 折叠结构制造加工过程
4.2 一体化制造方法
微型扑翼飞行器如果采用分部件制造再使用手工进行装配的方案,组装过程中难免会产生误差,致使扑翼飞行器精度降低,影响其最终性能[44]。一体化制造方法的提出大大减少了人工操作装配的难度,使装配精度问题的影响变小。一体化制造将柔性铰链、90°旋转折痕和180°旋转折痕等3种不同的结构进行折叠和锁定,将平面一体化结构转变为所需要的三维结构[45]。制造过程是将碳纤维板预先设计需要的图形轮廓,经定位孔定位后由真空袋压技术粘合在一起,再通过激光切割得到设计好的图形轮廓,最后折叠使其立体化,如图20所示。

图20 上海交大一体化制造扑翼飞行器
4.3 PC-MEMS制造方法
传统的MEMS工艺源于集成电路制造技术[46],而PC-MEMS技术则是借鉴印刷电路板(PCB)的制造方法,广泛应用于制造中尺度MEMS器件。工艺制作过程主要包括4步:层压碳纤维薄板、减材微加工、折叠、锁定[47]。在层压碳纤维薄板步骤的过程中,要保证碳纤维板层间的对齐,也要确保层级之间的连续性。所有的折叠部件都将要耦合到平面的装配自由度中,然后通过微加工技术释放折叠接头,从而使装配体弹出,再将所有弹出的机构部件锁住,最后释放所有自由度完成组装。图21为利用PC-MEMS技术加工的一种典型的微型扑翼飞行器。

图21 PC-MEMS技术加工的微型扑翼飞行器
5 结论
仿生微型扑翼飞行器是一个多学科深度交叉融合的热门研究方向,对先进材料、控制系统、非定常空气动力学等领域的发展具有重要的学术意义和广泛的应用价值。根据微型扑翼飞行器体积小、机动灵活、使用方便、造价低廉、隐蔽性强难以被侦测等特点,可以在复杂有限空间环境下侦察预警、跟踪定位、电子干扰、目标鉴别指示、巡逻、通讯甚至集群作战攻击等军事用途,实现信息化、无人化、自动化、智能化联合的一体化作战。此外,还可应用于电力巡检、执行救援任务、复杂地形扫描、农业喷洒、气象监测、自然灾害和突发事故等民事用途,能够节省大量人力资源、提高生产水平,实现高效快速作业。目前,虽然仿生微型扑翼飞行器已经取得了较多成果,但是与实际应用要求还存在很大的距离,主要问题包括:
1) 对低雷诺数下扑翼飞行器的空气动力学问题缺乏系统的理论研究。目前,已有的生物扑翼飞行机理研究主要还是基于高雷诺数下,普遍采用准稳态空气动力学计算方法,但是该方法准确性不足,难以揭示扑翼飞行生物非定常非线性空气动力系统的高升力机制,同时对扑翼飞行的升力、机动、内在力学等机制也未建立准确的模型和分析方法,无法对仿生微型扑翼飞行器的设计、制造和控制提供有效的理论指导方法。
2) 缺乏高效微型化加工制造技术及相关功能材料开发研究。目前,已有研究的微型扑翼飞行器尺寸一般在厘米、毫米量级,最小结构的特征尺寸也约在亚毫米量级。然而,自然界飞行生物的一些身体结构是由微米级甚至纳米级的多级、多尺度结构大规模复合而成,现有的微型化加工制造技术还无法达到飞行生物身体结构的尺度级别和复杂程度。因此需要进一步研究与生物结构优异特性相媲美的大规模微型结构的高效制造技术。目前,扑翼飞行器机体的一般采用碳纤维材料或有机塑料等制造,未来还需要开发更易于加工的高强度低密度材料。此外,压电驱动和介电驱动的功率密度还较小,驱动电压也很高,需要开发功率密度大、更加易于驱动且功耗小的新型驱动材料,以实现制造更加轻量化、高效率的微型扑翼飞行器。
3) 负载能力低、续航时间短。由于微型扑翼飞行器的体积小、质量轻,导致其可携带的能源和输出功率有限。同时,商用的锂电池能量密度还不能与自然飞行生物体相比,还不能为克服微型扑翼飞行器自重外提供更多的升力以携带更多的负载,或者更长的飞行时间和飞行距离。因此,目前已有微型扑翼飞行器大多采用外接电源和控制电路的有线系留飞行,大大限制了它的飞行范围。
4) 控制策略和方法不够完善。微型扑翼飞行器在自主飞行时,需要大量信息的实时传输、计算与反馈,这对控制系统的运算能力要求非常高。但是由于其负载能力有限,导致可携带的控制系统硬件资源有限,无法实现大量数据和复杂算法的实时运算处理,这也对控制理论和算法的设计提出了更高的要求。
针对上述问题,未来微型扑翼飞行器将逐步改进,将主要向以下3个趋势发展:
1) 系统化。将继续探索改进微型扑翼飞行器气动能效性的方法,深入研究非定常非线性空气动力系统的力学建模和分析方法,基于离线或在线技术,通过辨识、学习、自适应、自修正扑翼飞行器的结构和惯性参数,获得精准的系统动态模型。将控制系统、驱动系统、供给系统与微型扑翼飞行器高度集成在整个机械系统内,实现微型扑翼飞行器的一体化设计。
2) 微型化与轻量化。目前,扑翼飞行器的微型化制造技术主要采用介于MEMS和传统大型制造技术之间的激光切割、SCM工艺等加工手段,未来还需研究更多方法进一步拓宽加工尺度范围和效率。同时,也需要对高强度、低密度的结构材料和相关功能材料进行探索,不仅针对其性能优化提高,同样研究更加易于微加工的制造技术,突破进一步减小飞行器尺度和质量的瓶颈。
3) 智能化。在微型扑翼飞行器中,除了需要机械系统提供稳定飞行的动力外,还应具备传感、通信、控制等电子系统[48]。为了使微型扑翼飞行器更加接近仿生对象的真实飞行特性,例如复杂环境中的自主识别、判断决策、避障逃逸等,需要进一步设计和优化控制系统,提高稳定性和鲁棒性,有效改善飞行运动的能效性、灵活性和负载能力。同时,根据不同环境和任务要求,还需发展协同能力强、互不干扰的分布式智能控制网络。
猜你喜欢
实验流体力学(2023年1期)2023-03-21
玩具世界(2022年3期)2022-09-20
凤凰动漫(军事大王)(2022年1期)2022-04-19
装备制造技术(2020年1期)2020-12-25
甘肃教育(2020年2期)2020-09-11
空间科学学报(2020年4期)2020-04-22
小学生优秀作文(低年级)(2018年9期)2018-09-10
电子制作(2018年2期)2018-04-18
小学生必读(低年级版)(2018年11期)2018-03-13
北京航空航天大学学报(2016年3期)2016-02-27
