基于粒子群PID-Smith 控制器的列车精确停车算法研究
2023-03-31 06:17王杰胜
科技与创新 2023年6期
王杰胜
(中铁第一勘察设计院集团有限公司,陕西 西安 710000)
1 背景概述
停车精度作为衡量列车自动驾驶系统的重要性能指标之一,一般规定在±30 cm 之内。列车的精确停车是确保运输效率的前提,如果停车的精确度达不到规定的标准,不仅会降低运输效率,而且会造成列车到达不及时和影响乘客上下车等问题,因此实现列车的精确停车功能具有非常重要的现实意义[1]。
为提高列车的停车精度,专家学者们进行了深入研究,提出了一些方法。文献[2]考虑了由于多种因素造成的模型参数变化的问题,结合列车制动模型,设计出针对制动模型参数改变而自适应调整的控制器,可以实现对参数的在线估计,跟踪理想曲线,实现精确停车;文献[3]以列车动力学模型为基础,结合线性二次型最优控制与系统辨识理论,设计了一种精确停车控制器;文献[4]将预测控制理论应用到停车控制器中,考虑约束条件,设计了一种以列车参考速度和距离为控制目标的预测控制器,实现高精度的停车和高舒适性的要求;文献[5]采用自适应参数调节机制,使用终端滑模控制不仅可提高控制系统的鲁棒性与自适应性,同时也避免了控制的频繁切换;文献[6]设计出一种基于组合趋近律的准滑模控制器实现精确停车,不需要额外的控制器来辅助减弱滑模的抖振,结构简单、响应快且对外界的干扰具有强鲁棒性;文献[7]通过分析列车制动过程中的制动力与速度之间的关系,建立列车多质点动力学模型,将基于神经网络的PID(Proportional Integral Derivative)控制器与Smith 控制器相结合,实现制动过程中精确跟踪参考速度,停车精度满足进站停车的要求;文献[8]通过分析列车制动系统模型,设计了一种自适应模糊滑模控制器,不仅可以柔化控制信号,也可以在一定程度上抑制滑模控制的抖振现象,从而精确追踪理想曲线并实现精确停车。
在列车制动控制过程中,目前技术较为成熟、应用较为广泛的是PID 控制器,它具有结构简单、鲁棒性强和可靠性高等优点,合理的PID 控制算法不仅可以保证列车的停车时间,也可以保证列车的停车精度。本文对比文献[7]、文献[8]、文献[9],以列车制动系统模型为基础,通过分析粒子群PID 控制器和Smith控制器的特点,设计出一种粒子群PID-Smith 控制器,实现对外界干扰与系统参数摄动的自适应鲁棒控制。
2 列车制动系统模型
列车制动系统本质上是动力伺服系统的一种,由制动控制器通过反馈调节跟踪目标加速度,是列车安全运行的保证,主要用于调节车速和实现停车。由于制动控制系统机电装置受传输时延的影响,其制动过程可以近似成典型工业环节中具有纯滞后的一阶惯性环节,可以用式(1)表示:
数学模型可以表示为:
式(2)中:ac为控制加速度,通过制动控制器产生;τ为系统响应时间常数;at为目标加速度,是ATO 设定的制动加速度;T为传输延时时间。
列车实际加速度a(t)由控制加速度ac和环境等因素造成的附加加速度d(t)组成,即:
通过对上述过程的分析,得到列车制动系统模型,如图1 所示。

图1 列车制动系统模型框图
为了简化控制器的设计,引入一阶pade 来近似式(4)中的延时函数。
式(4)中:λ为与传输时延T有关的常数,通常为2/T。
将式(4)代入式(1)中可得:
式(5)中:Ac(t)和At(t)为ac(t)和at(t)的拉普拉斯变换。
列车制动过程采取连续式一次制动方式,ATO 实时跟踪参考曲线控制列车的运行速度,为了提高乘坐的舒适性,列车以恒定加速度进行制动。在列车制动过程中,开始时由于制动系统本身存在延时问题,对参考曲线的追踪有一定的时滞;由于整个制动过程中存在外部干扰及制动系统的磨损和老化导致列车参数发生变化,也会影响到追踪参考曲线。因此,本文的研究重点是根据列车运行参数设计合理的制动控制器来补偿外部干扰和列车参数变化对停车精度造成的影响,从而控制列车精确追踪参考曲线并实现精确停车。
3 粒子群PID-Smith 控制器设计
3.1 基本PSO 算法
粒子群算法(Particle Swarm Optimization,PSO)是一种全局寻优算法,通过群体中个体之间的协作和信息共享来寻找最优解。粒子只包含2 个属性,即速度和位置,速度表示粒子下一步迭代时移动的方向和距离,位置是所求解问题的一个解。
在N维空间中,粒子i 的位置Xi=(xi1,xi2,…,xiN),速度Vi=(vi1,vi2,…,viN),每个粒子都对应一个由目标函数决定的适应值fi,并且粒子找到自身的最优解(即个体极值pbest)和整个种群的最优解(即全局极值gbest)。在确定pbest与gbest之后,就可以根据式(6)和式(7)计算每个粒子新的速度与位置:
式(6)(7)中:dvi为粒子i 在第d次迭代时的速度;w为惯性因子,可以调整全局和局部寻优能力;c1、c2为学习因子,一般取c1=c2;r1、r2是均匀分布在(0,1)范围内的随机数;为粒子i 经过d次迭代的最好位置;为所有粒子经过d次迭代的最好位置;为粒子i 在第d次迭代时的位置。
粒子群算法的具体过程如下:①初始化粒子群,包括群体规模N、每个粒子的位置xi和速度vi等。②计算粒子的适应度值fit[i]、个体极值pbest(i)和全局极值gbest(i)。若fit[i]>pbest(i),则令pbest(i)=fit[i];若fit[i]>gbest(i),则令gbest(i)=fit[i]。③优化每个粒子的速度和位置,Vmin和Vmax(大于0)分别是粒子的最小速度和最大速度,如果vi大于Vmax,则vi=Vmax,如果vi小于Vmin,则vi=Vmin;Xmin和Xmax分别为粒子的最小位置和最大位置,如果xi>Xmax,则xi=Xmax,如果xi<Xmin,则xi=Xmin。④若满足循环终止条件则退出,否则转到步骤②。
3.2 基于PSO 算法的PID 控制系统
PID 控制系统结构如图2 所示,由PID 控制器和被控对象组成,而PID 控制器包括比例、积分和微分单元3 部分,每个单元都会影响控制系统的控制效果。

图2 PID 控制系统结构图
本文利用PSO 算法整定和优化PID 参数,将系统误差作为适应度函数的输入,计算函数值,然后根据函数值调整PID 参数,在参数可行域内寻找一组合适的参数使系统性能指标达到最优,从而实现PID 优化控制,基于PSO 算法的PID 控制系统原理如图3所示。
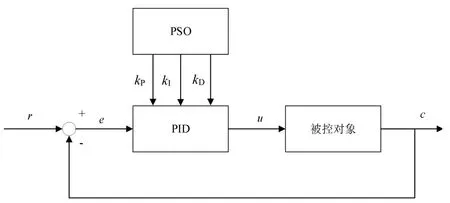
图3 基于PSO 算法的PID 控制系统原理图
3.3 Smith 控制器设计
由式(1)可以看出,被控对象存在延时环节,控制器不能立刻对被控对象进行调节,增加了系统的调节时间和超调量,降低了系统的控制精度和稳定性,使得整体的优化效果下降。在对被控对象的动态特性分析中,经常使用过程时滞τ和过程惯性时间参数T的比值来分析被控过程纯滞后的级别,该比值的大小直接关系到控制系统的可控性。如果τ/T<0.3,则称该过程为一般滞后过程,过程较易控制;如果τ/T>0.3,则称该过程为大滞后过程,其控制难度随着τ/T的比值的增大而增加。滞后过程的滞后时间越大,系统的稳定性就越差,控制难度也会越大,对控制品质也越不利。
Smith 补偿控制的设计思路是根据已知精确的传递函数,通过计算在反馈中添加补偿环节来减弱甚至抵消被控对象的滞后部分,从而提高系统的控制精度和稳定性。
常规带延时环节的控制器结构如图4 所示。
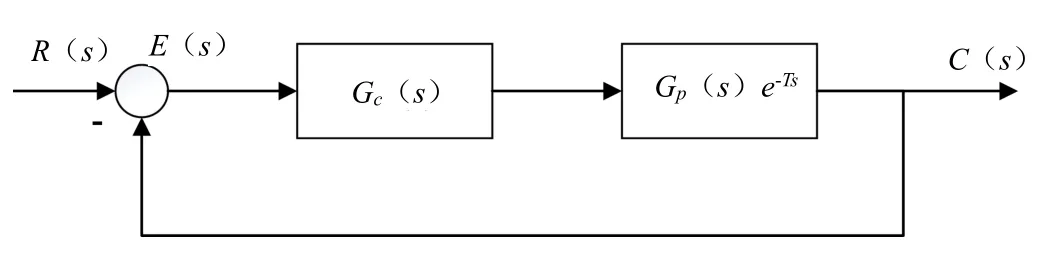
图4 常规带延时环节的控制器结构图
传递函数如下[10]:
Smith 控制器结构如图5 所示。
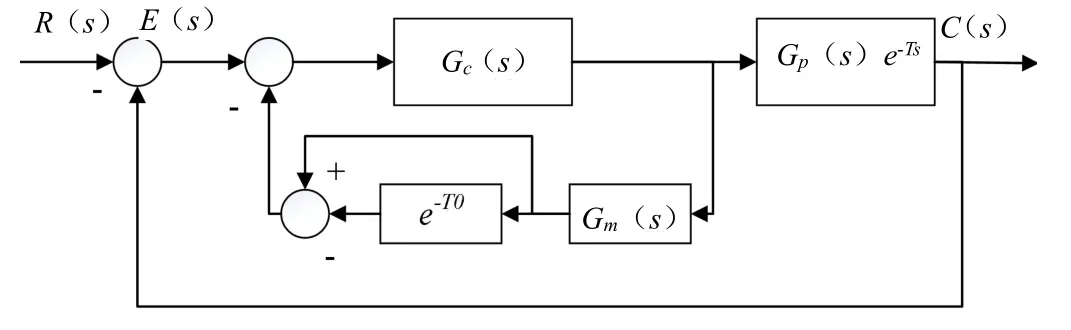
图5 Smith 控制器结构图
传递函数为:
若Gp(s)=Gm(s)、τ0=τ,式(9)变为:
由式(9)和式(10)可知,延时环节e-τs不再出现于系统的闭环传递函数中,因此不会再影响系统的稳定性。Smith 控制器使被调量超前反馈到控制器,从而改善由于控制对象的延迟带来的控制效果。
3.4 粒子群PID 控制器与Smith 控制器结合
通过对粒子群PID-Smith 控制器每个环节的分析和设计,实现对控制器的整体设计,控制器系统结构如图6 所示。
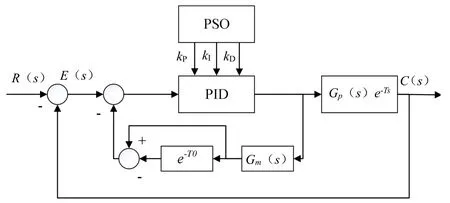
图6 粒子群PID-Smith 控制器系统结构图
设计原理是利用PSO 算法调整PID 控制器的3 个可调参数来适应外界干扰对系统的影响,同时结合Smith 控制器来实现对系统时滞的补偿,从而提高系统的稳定性和控制精度。
4 仿真验证
为验证本文设计算法的有效性,利用MATLAB 进行仿真分析。理想制动曲线采用恒定制动加速度-0.65 m/s2,制动时初始位置设置为0 m,初始速度设置为19.8 m/s,考虑到控制器的饱和情况,最大减速度设置为-1 m/s2。
在仿真过程中考虑由于附加阻力引起的扰动以及由于测量噪声引起的误差,并视为高斯白噪声。相关仿真参数设置如表1 所示。
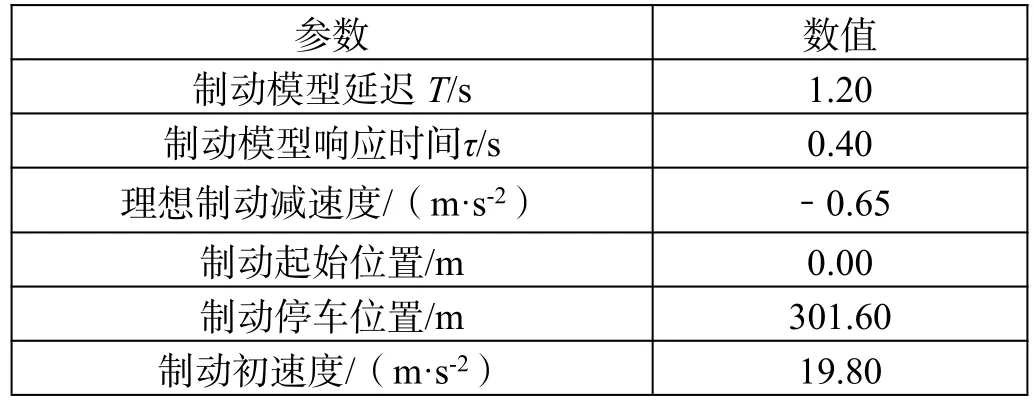
表1 列车运行基本参数
4.1 不考虑外部干扰及列车参数变化
在不考虑外部干扰及列车参数变化对控制系统的影响时,通过对比图7 中的参考曲线和粒子群PID 控制曲线以及粒子群PID-Smith 控制曲线可以分析出粒子群PID 控制和粒子群PID-Smith 控制对于被控系统的控制效果,2 种控制方式虽然都可以达到±30 cm 的停车精度。但通过对比图7(c)中2 条控制曲线可以看出,粒子群PID 控制的停车精度是0.18 m,而粒子群PID-Smith 控制的停车精度是0.05 m,粒子群PID-Smith 控制的停车精度更高,也就意味着在不考虑外部干扰和列车参数变化时粒子群PID-Smith 控制的控制效果更好。
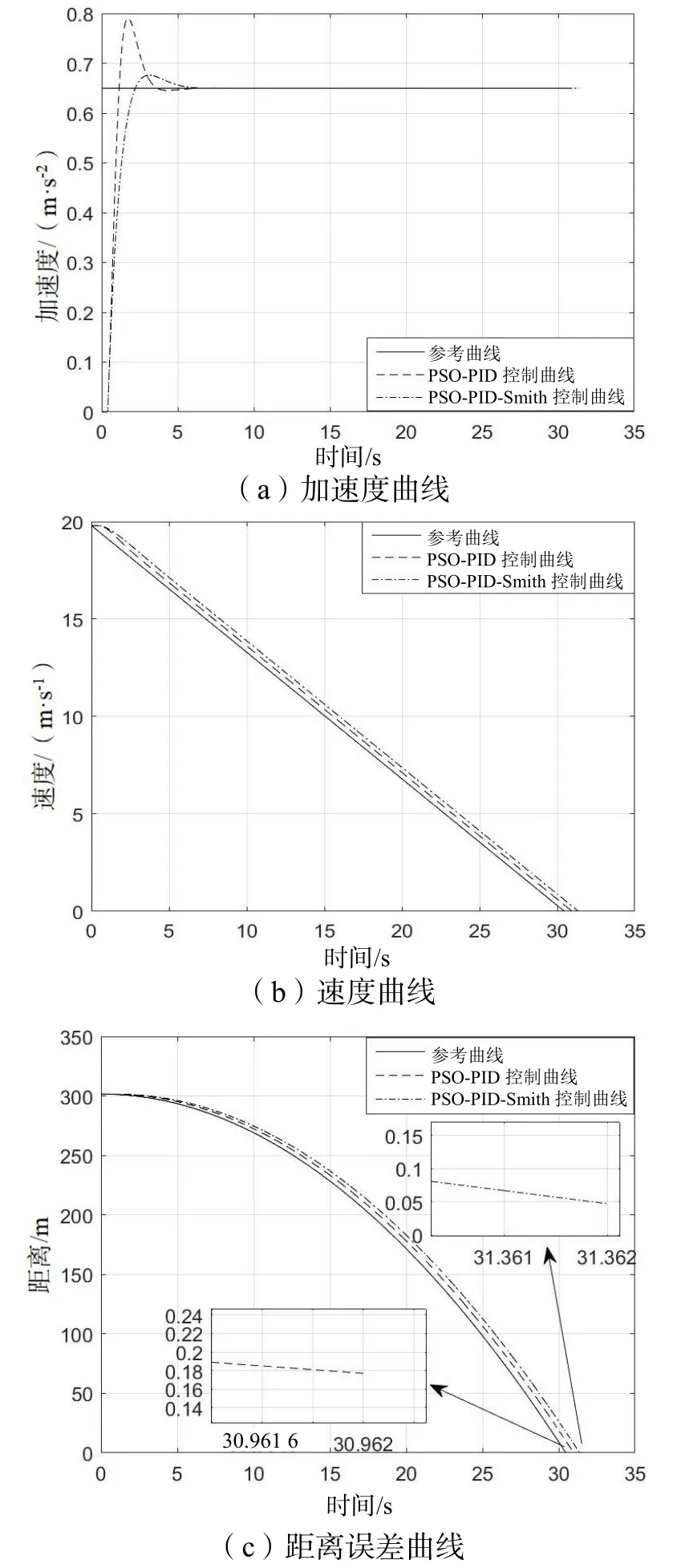
图7 理想情况下粒子群PID 控制和粒子群PID-Smith控制曲线与参考曲线对比
4.2 外部干扰为高斯白噪声
由于列车测速测距传感器、电气结构设备等不可避免地会产生随机误差,从而对观测结果造成随机扰动,这里将这些扰动视为高斯白噪声。当系统附加目标加速度值的5%~20%的随机噪声时,不同外部干扰条件下粒子群PID 控制、粒子群PID-Smith 控制与参考曲线的误差如图8 所示。
从图8 中可以看出,粒子群PID-Smith 控制器相较于粒子群PID 控制器使列车能够在更小的误差范围内追踪理想曲线,说明前者具备更好的快速响应能力[10]。

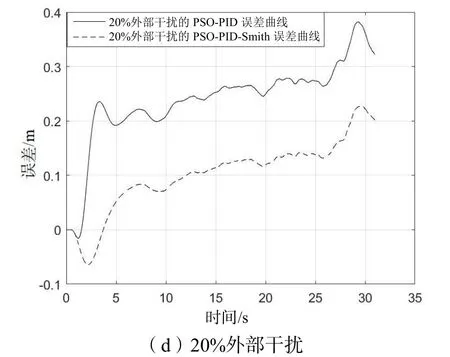
图8 不同外部干扰条件下粒子群PID 控制和粒子群PID-Smith 控制误差曲线对比
在不同的外部干扰条件下粒子群PID 控制和粒子群PID-Smith 控制的停车精度对比如表2 所示。从表2中可以看出,粒子群PID-Smith 控制的停车精度相较于粒子群PID 控制的停车精度更高,也就意味着粒子群PID-Smith 控制的控制效果更好。
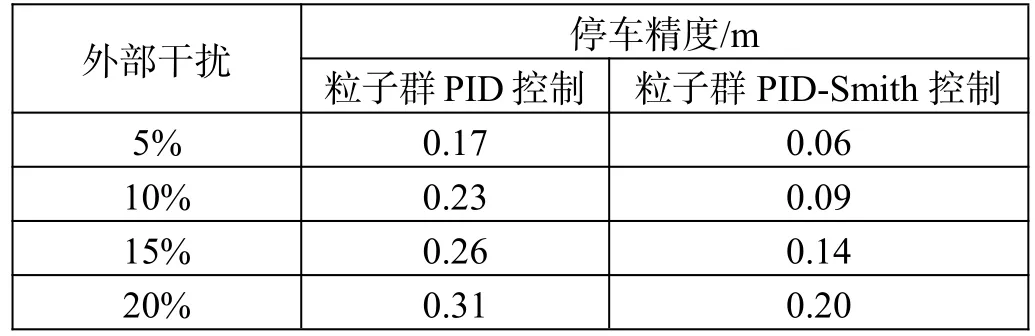
表2 不同外部干扰下粒子群PID 控制与粒子群PID-Smith 控制停车精度对比
4.3 列车参数变化
由于列车制动系统结构的磨损和老化引起的列车参数变化会造成列车制动系统模型变化,其中主要考虑参数传输时延T变化时对停车精度造成的影响。由于该变化过程存在慢时变的特性,因此在每次列车制动过程的仿真中可以将制动系统模型的偏差量视为恒定值,同时也需要考虑外部干扰的问题,在仿真中仍将其视作高斯白噪声。表3 为不同传输时延参数条件下粒子群PID 控制与粒子群PID-Smith 控制的停车精度对比,其中外部干扰设置为目标加速度值的10%。从表3 中可以看出在不同传输时延参数条件下,粒子群PID-Smith控制相较于粒子群PID 控制的停车精度更高,也就意味着粒子群PID-Smith 控制的控制效果更好。

表3 不同传输时延参数条件下粒子群PID控制与粒子群PID-Smith 控制停车精度对比
5 结论
本文以列车制动系统模型为研究对象,主要针对列车运行过程中外部干扰和列车参数变化对停车精度造成的影响,通过对粒子群PID 控制器和Smith 控制器特点的分析,设计了一种粒子群PID-Smith 控制器。理论分析表明,利用粒子群PID-Smith 控制器可以实现对外部干扰和列车参数变化的鲁棒性控制,提高系统的抗干扰能力与控制精度。通过仿真平台对设计的控制器进行验证,仿真结果表明该方法不仅可以保证停车的高精度要求,同时也保证了乘坐的舒适性。
猜你喜欢
当代水产(2022年6期)2022-06-29
小哥白尼(趣味科学)(2021年4期)2021-07-28
云南画报(2021年4期)2021-07-22
小学生学习指导(低年级)(2019年6期)2019-07-22
汽车观察(2018年12期)2018-12-26
测控技术(2018年10期)2018-11-25
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
浙江工业大学学报(2017年5期)2018-01-22
中国火炬(2014年11期)2014-07-25