
复杂地形下无人机搭载的智能垃圾拾取机器人设计
2023-03-23 07:44邹欣桐王晓媛马一鸣于听雨
机电工程技术 2023年2期
邹欣桐,王晓媛,彭 辰,马一鸣,于听雨
(华东理工大学机械与动力工程学院,上海 200237)
0 引言
近年来,环境保护日益受到人们关注。目前,山地、景区、水库、沼泽等较为复杂地形下的垃圾拾取问题主要还是通过人工拾取,这样的处理方式不仅效率低下,还会使得清洁人员处于较大的危险之中。
面对这样的问题,无人机与机械臂的结合为解决复杂地形下垃圾的处理提出了新的可能性。国内外的研究人员对此进行了大量的研究,发现机械臂的搭载平台可以为六自由度移动的无人机,便于机械臂到达例如山地、景区、水库、沼泽等地形较为复杂的工作环境之中。而无人机搭载的工作装置为机械臂,使得无人机不仅有检测与观察环境的能力[1-2],同时也易于人机交互以及操作控制。
在复杂地形下的垃圾拾取工作中,无人机与机械臂的结合[3-5]使得垃圾拾取的安全性大幅度提高,同时具有拾取效率高、准确率高、安全性高以及节约人力等显著优点。而目前国内外无人机与机械臂相结合的技术尚处在研究开发的初期,技术不够成熟,应用也不够普及。
本文设计了一款无人机搭载的智能垃圾拾取机器人,以精妙的机械设计以及合理的电路排布,通过机械传动系统、飞控系统以及电控系统的协调运作,实现复杂地形下垃圾的拾取与收纳。最后,通过对整体机器的重心位置分析以及机械部件的有限元分析,校核其力学稳定性与安全性,从而验证系统设计的合理性。
1 总体设计方案
复杂地形下无人机搭载的智能垃圾拾取机器人的整体控制流程如图1所示,其主要工作流程如下:
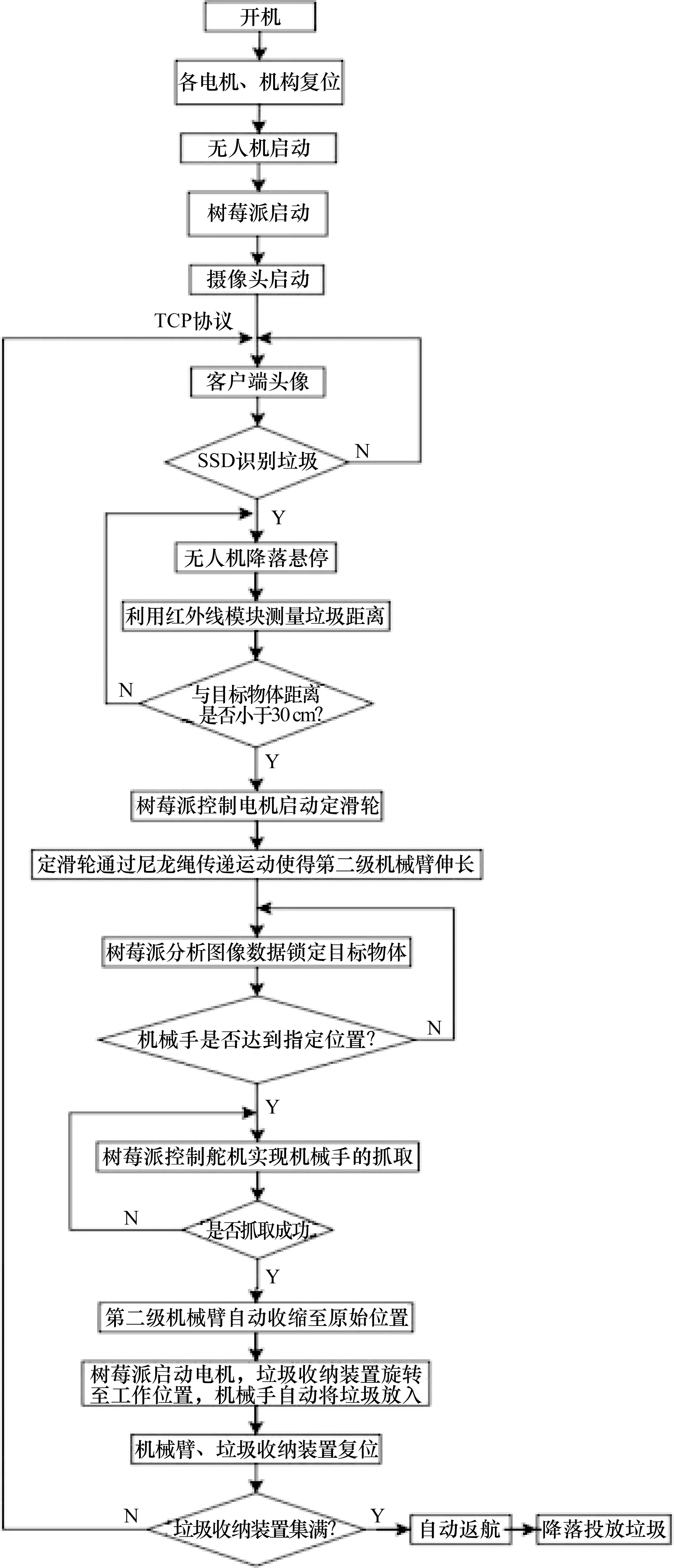
图1 工作流程
(1)使用TCP 协议,由无人机上的CSI 摄像头作为图像传输装置,将无人机前方视频同步传输到客户端程序;
(2)根据接收到的图像,利用SSD 算法识别图像中垃圾的大致方位,进行标注,便于定位;
(3)成功识别到垃圾后,操作者操作无人机降落至垃圾上方,并操作无人机至悬停状态;
(4)启动拾取程序,利用树莓派控制电机启动机械臂,控制舵机启动机械手,以实现机械臂抓取垃圾的动作;
(5)启动收集程序,将垃圾自动放入到收集装置中;
(6)往复进行以上动作,直至垃圾收纳装置集满,无人机自动返航,将垃圾投放。
2 机械机构设计2.1 整体机械结构
复杂地形下无人机搭载的智能垃圾拾取机器人整体结构如图2所示,主要由无人机部分、机械臂-机械手部分、垃圾收纳部分3个部分组成。其中,机械臂-机械手部分与垃圾收纳部分通过云台与无人机部分相连接。

图2 整体机械结构示意图
2.2 机构动作流程
无人机启动后,通过图传装置和SSD 算法识别及定位到垃圾位置,操作者将无人机降落悬停至垃圾位置附近,开始进行垃圾的拾取及收纳。
首先,操作者启动拾取程序,控制电机启动定滑轮,定滑轮连同尼龙绳带动第二级机械臂进行伸长,此时机械手到达指定位置;接着,控制舵机启动机械手,机械手通过夹紧动作实现垃圾的抓取;完成垃圾拾取动作后,定滑轮反方向转动,带动第二级机械臂收缩至原始位置;同时,控制电机带动垃圾收纳装置旋转至机械手正下方,机械手松开,垃圾落入垃圾收纳装置内;最后,控制机械臂-机械手部分和垃圾收纳部分复位,完成一次垃圾的拾取[6]。往复进行以上动作,直至垃圾收纳装置集满,无人机自动返航,投放垃圾。
2.3 各机构部分设计
2.3.1 无人机部分
本设计的无人机为八轴式旋翼无人机[7],装配有云台以及起落架,可承载质量高达8 kg,除去所搭载装置自重外,仍可承载5 kg 的质量。无人机为可操纵式具有上升、下降、悬停等不同的飞行姿态[8]。
2.3.2 机械臂-机械手部分
其功能为完成垃圾的抓取,优势为结构简单、高效低耗、传动巧妙。
如图3 所示,本部分主要由2 段PVC 杆、2个定滑轮、1 个机械手、2 个42 步 进 电 机、1 个DS3218 舵机组成。该部分的设计创新点在于两段PVC 杆构成伸缩杆结构组成二级机械臂,由定滑轮及尼龙绳带动其伸长与收缩。通过定滑轮、尼龙绳与伸缩杆结构的有机配合,不仅可以实现机械臂的收缩,同时对比液压传动装置,其结构简单、传动效率高、经济成本低,虽然平稳性不比液压传动装置,但是在低速进给情况下,其平稳性已满足收缩及抓取运动的要求。抓取垃圾的具体流程:无人机悬停于指定位置后,操纵者通过遥控发出抓取指令,此时控制定滑轮的电机转动,带动机械臂伸长;机械臂伸长至指定位置后,机械手通过舵机带动而夹紧,拾取垃圾[9];完成垃圾拾取动作后,定滑轮反方向转动,带动机械臂收缩至原始位置,实现一次垃圾的抓取。
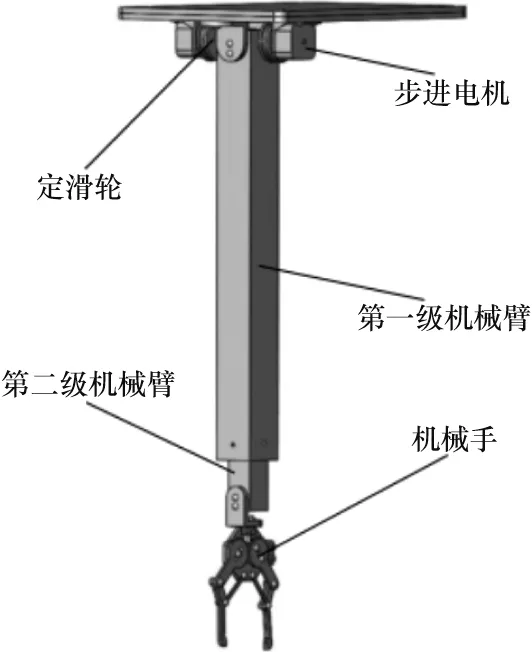
图3 机械臂-机械手部分结构示意图
2.3.3 垃圾收纳部分
垃圾收纳装置主要由一段PVC 杆、一个42 步进电机、软质塑料容器组成。42 步进电机带动垃圾收纳装置转动,与机械臂的伸长与收缩以及机械手的夹紧与放松相配合。垃圾收纳框连接件使用钢材,保证较强的刚度及稳定性,其形状为半径为10 cm 的圆,能够保证大部分垃圾可顺利进入垃圾收纳筐。垃圾收纳筐采用软质塑料,其体积可根据垃圾存储量进行调整,并避免与其余机构发生冲突。
3 受力及有限元分析3.1 重心位置分析
无人机的飞行性能与重心位置密切相关[10]。在水平方向上,如果无人机的重心位置发生偏移,将会导致无人机起飞困难且伴有偏飞,进而导致飞行操控难度加大,因此需要对无人机搭载的智能垃圾拾取机器人进行中心位置的校正;在垂直方向上,重心过高不利于飞行器的稳定性,同时重心离螺旋桨平面越远会增加飞行器的惰性进而导致飞行器耗电多,做功大,因此要求无人机在垂直方向上在保持稳定性的条件下,使得重心位置尽量靠近螺旋桨[11]。运用Solidworks对机器人进行建模以及不同材料密度的设置,得到重心位置如图4 所示。模型重心等参数如表1 所示。图中机器人重心在水平方向位于无人机中心位置,无偏移,符合要求;重心在垂直方向上位于云台正下方,即可保证飞行的平稳性,也可以保证飞行的机动性。
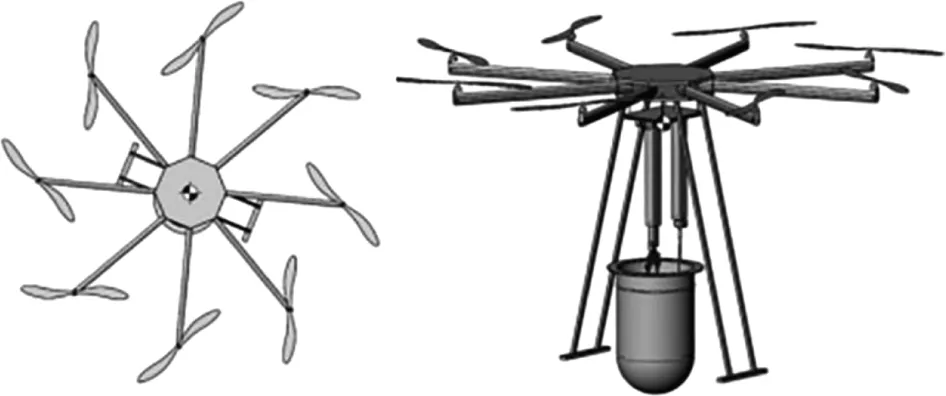
图4 整体模型的重心
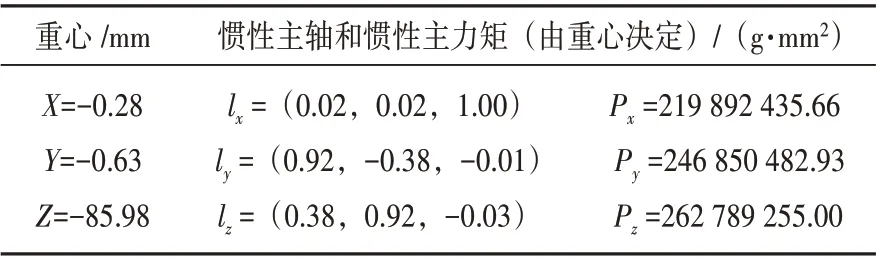
表1 整体模型的重心参数
3.2 受力分析
无人机在飞行过程中,螺旋桨是产生升力的唯一来源,同时云台正下方是无人机、机械臂和垃圾回收一体化装置的重心位置,即重力的作用位置。机器人的不同飞行状态取决于升力与重力的大小关系。机器人总质量为16.40 kg,在空中悬停时,受力平衡,无人机框架单臂升力为2.05 kg。为满足无人机正常起降,无人机框架单臂升力大于2.05 kg,同时为满足无人机姿态控制时的加速需求,单臂升力最大为10.20 kg,单臂动力富裕系数为4.98。在最大升力的状态下,机器人受力状态如图5所示,此时升力大于重力,机器人处于上升状态。

图5 整体模型受力状态
3.3 机械手有限元分析
为了保证机器人能够平稳且安全地实现飞行以及抓取垃圾的一体化操作,必须对机器人进行强度计算以及校核。根据机器人运动学以及受力分析,机械臂抓取部分的机械手、无人机的机臂和中心板是最危险区域[12]。由于无人机负载按照其标准配置且中心位置无偏移,因此无人机强度满足要求,故主要对机械手进行强度计算和校核,本研究利用ANSYS 对其进行有限元变形、应变和应力计算和分析,从而保证机器人的强度的安全性和挠度的合理性[13-14]。
根据机械臂结构和运动特性以及机械手电机的选型,将机械手与机械臂连接部分和与抓取垃圾的爪作为固定面;根据一次抓取的垃圾质量为500 g,安全系数为2.04,在2 个抓取垃圾的爪部施以最大抓取力10 N。机械手以碳纤维作为材料基体,其抗拉强度为290 GPa,弹性模量为6.02 GPa,泊松比为0.012[15-16]。
有限元分析计算结果如图6 所示,抓取爪部是最大变形量处,且最大变形量为1.395 × 10-7m,该变形量远小于机械手允许最大变形量,所以挠度满足安全设计要求。

图6 机械手总变形云图
如图7 所示,机械手在啮合齿处产生最大应变,其值为6.135 5× 10-5,该应变远小于机械手允许最大应变,所以应变也满足安全设计要求。
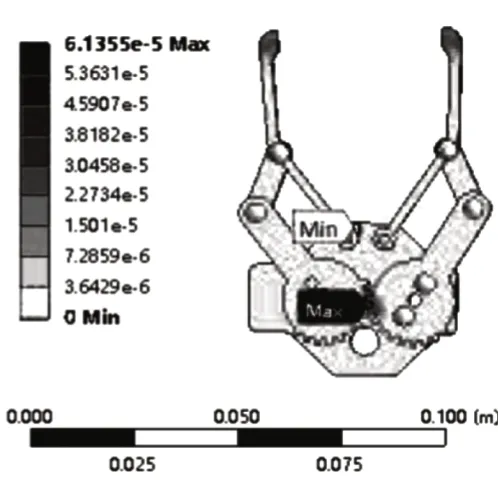
图7 机械手应变形云图
如图8 所示,机械手最大静应力位置在在啮合齿处,其值为1.227 1× 107Pa,机械手材料为碳纤维,抗拉强度为290 GPa,从相关文献中查得静载荷的安全系数许用值为1.5~2.0[17],得到许用应力:

图8 机械手应力云图
[σ]=σb/nb= 1.45× 1011Pa >1.2271× 107Pa[18]。
所以强度也是满足安全设计要求。
通过以上验证,机械手满足材料强度要求、刚度要求以及高可靠度要求(失效概率不大于0.01%)。最危险位置为齿轮啮合处,该处强度、刚度均在许用值范围内,满足不失效工作条件。机械手最大抓取力预估为10 N,满足一次性抓取500 g垃圾的需求。
4 控制系统设计
4.1 动力源选择
为在拾取垃圾的过程中保持稳定,机械手部件处舵机选用大扭力DS3218 数字舵机(180 °),其空载转速为0.16 s/60 °,堵转扭矩18~21.5 kg/cm,满足抓取塑料瓶及纸屑等垃圾的抓取力需求。传动定滑轮处以及垃圾臂回转处电机选择42 步进电机,该电机质量为282 g,额定电压为3.3 V,步距角为1.8 ± 5%°/步,保持转矩48 N·cm,满足传动力以及稳定性需求。根据所选电机以及舵机数量和型号,动力系统选择5 V、2 A的电源进行供电。
4.2 控制系统组成
无人机采用Pixhawk4 作为飞控控制系统,该系统架构清晰,生态系统庞大而完善,具有多线程,可以保证自动飞行姿态的自由性,多数外设可以自动检测和配置。凭借其双处理器,搭配树莓派3B+作为飞控扩展,装备有摄像头、云台、机械臂,可以在安全稳定的情况下,以进行图像传输和识别、垃圾拾取运动等操作。
4.3 控制原理及流程
无人机控制系统启动后,树莓派程序自动开始运行,通过Python 编写的多线程程序控制无人机外设。图像传输装置选用CSI 摄像头,使用TCP 协议,将图像数据转换为流数据并存储到内存中,在同一局域网下启动客户端程序,将进行base64 编码后的流数据发送给客户端。客户端程序将数据解码为图像,显示在窗口上,实现无人机前方视频同步传输到客户端程序。客户端程序中还包括有SSD 算法,该算法速度快,可以一次完成目标定位,同时,基于特征金字塔的检测方式,在不同特征映射下预测目标,比Yolo 算法更能准确识别小目标,更适用于飞行、悬空姿态下对垃圾进行标注及定位。
发现垃圾后,操作者降落无人机,启动拾取程序,通过树莓派利用RPI.GPIO 库输出高低电平,以实现对步进电机、舵机323 的控制,进一步实现机械臂抓取垃圾的动作,并将垃圾自动放入到收集装置中。往复进行以上动作,直至垃圾收纳装置集满,无人机自动返航,将垃圾投放。
5 结束语
为实现复杂地形下的垃圾智能化拾取,本文设计了一款复杂地形下无人机搭载的智能垃圾拾取机器人。本设计将SSD 算法、图像传输装置、Pixhawk 飞控技术及树莓派作为控制主体,结合以二级机械臂与可旋转垃圾收纳装置为主体的机械结构,可稳定、精准地完成飞行控制、垃圾识别、垃圾抓取以及垃圾收纳的统一动作,实现了人、机、电三者的交互控制。本设计将无人机与机械臂相结合,使用六自由度的无人机来搭载机械臂,进而机械臂的工作范围得到了极大程度的扩展,与此同时,图像传输装置使得操纵者能够实时知晓环境情况,降低误差,在保障安全的前提下高效地完成复杂地形下的垃圾拾取任务。在环境问题日益严重的今天,本设计为复杂地形下的垃圾拾取提供了新的思路,具有广阔的运用前景。
猜你喜欢
初中生学习指导·提升版(2020年5期)2020-09-10
自动化学报(2019年6期)2019-07-23
制造技术与机床(2018年11期)2018-11-23
电子制作(2018年1期)2018-04-04
河北农机(2017年12期)2018-01-20
制造技术与机床(2017年4期)2017-06-22
中学物理·高中(2017年4期)2017-04-27
制造业自动化(2017年2期)2017-03-20
通信电源技术(2016年1期)2016-04-16
舰船科学技术(2015年8期)2015-02-27
