考虑多直流无功交互影响的换相失败预防协调控制方法
2023-03-13 09:18郑晨一
电力系统自动化 2023年4期
郑晨一,汤 奕
(东南大学电气工程学院,江苏省南京市 210096)
0 引言
基于电网换相换流器的高压直流输电在大容量远距离电能输送及电网跨区互联等方面得到了广泛应用[1]。但逆变侧交流系统故障引起电压跌落时,直流系统易发生换相失败而导致功率传输中断,进而威胁电力系统的安全稳定运行[2]。
为有效抑制换相失败,针对直流系统的控制保护开展了大量研究,主要包括直流电流控制和关断角控制[3]。由于前者的准确有效实施受限于逆变站与整流站之间的通信传输延时,本地逆变侧关断角控制成为了研究重点,其核心在于减小换相过程的触发角,从而提升关断角裕度[4]。
在深入研究该类方法的基础上,建立了换相失败预防(commutation failure prevention,CFPREV)控制,当交流电压跌落超过其预设的阈值,能够立即启动并输出相应的触发角调整值[5]。相关文献研究了CFPREV 的固有特性及对电力系统的影响[6-7],分析了故障合闸角与其之间的关联[8],指出触发角的过度调整可能会恶化交流电压的稳定性[9]。通过故障检测优化[10]、自适应启动阈值[11]及触发角实时补偿[12]等方法,能够弥补CFPREV 在响应灵敏性、控制灵活性和调节精确性等方面的不足,但提前触发会增大直流无功消耗的问题仍然无法完全避免。而由于无功交互影响,这一问题在电气距离相互靠近的多馈入直流系统中变得更为严重,触发角的过度调节可能会对邻近直流的暂态特性造成不良影响,甚至导致多直流连锁换相失败[13]。
当前针对无功交互影响的研究主要集中于影响程度评估或同时换相失败判断。通常以多馈入交互作用因子进行评估,其定义为换流母线电压下降1%时邻近直流换流母线电压的变化率[14]。由于根据定义计算依赖于仿真,且电压的微小变化在实际电网中易受复杂因素的干扰,相关研究提出了交互作用因子的解析计算方法。文献[15]将其近似等效为逆变站间的等值阻抗比,针对阻抗比忽略了直流系统特性的问题,文献[16]提出采用修正后的雅可比矩阵进行计算。基于交互作用因子的解析计算结果,可确定引起多直流同时换相失败的临界阻抗和边界条件[17-18],将研究对象扩展至一般交流母线及线路,则可进一步识别引起多直流同时换相失败的受端电网薄弱区域[19-20]。
然而鲜有研究致力于考虑多直流交互影响的CFPREV 协调控制方法。文献[21]针对直流分层接入方式提出了高、低压阀组的协调控制策略,但未涉及无功交互影响导致的换相失败问题。文献[22]考虑无功交互影响制定了多直流CFPREV 启动阈值的协调优化方法,但其本质上仍然是离线的参数设计。文献[23]提出了根据邻近直流关断角裕度调节本地CFPREV 输出的实时控制方法,但基于增益系数挡位切换的方式导致其在控制连续性和场景适用性方面存在不足。
针对上述问题,本文在分析多馈入直流系统中传统CFPREV 局限性的基础上,提出了抑制多直流连锁换相失败的实时协调控制方法。考虑多直流换相电压状态及无功交互影响,实时连续地调节各直流CFPREV 的增益系数。当邻近直流换相电压较低时,能够限制增益系数从而减小无功交互影响;当本地直流换相电压较低时,适当增大增益系数以提升自身换相裕度。基于PSCAD/EMTDC 开展了仿真研究并与现有方法进行了对比分析,仿真结果验证了所提方法的有效性和优越性。
1 传统CFPREV 的局限性
直流系统的换相是指直流电流从一个阀转移到另一个阀的过程,换相过程的描述如附录A 图A1所示,其中α、β、μ、γ分别表示触发角、超前触发角、换相角和关断角。由于采用不可自行关断的晶闸管作为换流器件,若退出导通的阀在反向电压作用期间未能完全恢复阻断能力,即关断角小于恢复阻断所需的固有极限关断角,则会导致换相失败[1]。
由附录A 图A1 可知,减小触发角以实现提前触发是抑制换相失败的有效方法。因此,通常采用CFPREV 以实现这一控制目标,其控制逻辑如图1所示,包含2 个分别对应于对称故障和不对称故障的子模块[7]。其中,Ulevel1和Ulevel2表示不同模块的启动阈值;G1和G2表示不同模块的增益系数;Ua、Ub和Uc表示三相交流电压;Uα和Uβ表示三相电压经式(1)变换至两相静止坐标系下的值。当本地交流电压跌落超过预设的启动阈值,控制路径由0 切换至CFPREV 被触发状态,并在乘以相应的增益系数后,选取二者的较大值计算最终输出的触发角调整值。
根据上述控制逻辑可得式(2)所示的数学关系,可见输出的触发角调整值Δα与设定的增益系数大小正相关。
式中:G为增益系数,一般设定为0.075[8];ΔU为与初始值相比的电压跌落程度。
根据换流器的稳态运行方程,直流系统消耗的无功功率Qd可由式(3)描述:
在式(6)所示的取值范围约束内,式(4)的值始终为正,即f(α,μ)是触发角α的单调增函数。故Qd是触发角α的单调减函数,当在CFPREV 控制下减小触发角时,直流的无功消耗将随之增大并影响邻近逆变站的电压状态。
若邻近直流换相电压较低,则本地直流造成的无功扰动将进一步恶化其电压状态,甚至可能引起额外的换相失败。该过程呈现连锁故障所具有的因果序贯特征,故文献[13]将其定义为连锁换相失败,以区别于强调时间顺序的同时换相失败或相继换相失败等传统定义。而CFPREV 的增益系数设定为固定的常数意味着输入相近的本地电压会输出相近的触发角调整值,这显然忽略了复杂多变的暂态情况尤其是邻近直流的换相电压状态,因而削弱了其在受端电网较弱而逆变站电气距离相互靠近的多馈入直流系统中的有效性和适用性。
2 考虑无功交互影响的多直流CFPREV 协调控制
2.1 协调控制的目标和要求
2.1.1 总体研究思路
鉴于CFPREV 在多馈入直流系统中的局限性,有必要考虑多直流无功交互影响对CFPREV 进行协调控制,从而抑制多直流连锁换相失败。总体研究思路如图2 所示。
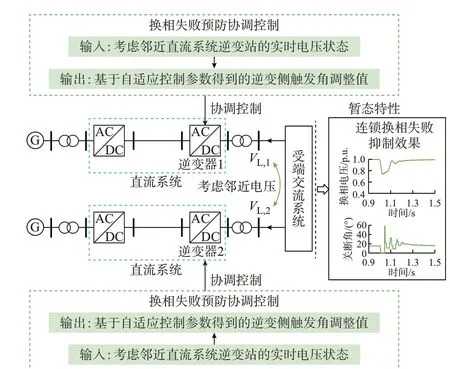
图2 协调CFPREV 的研究思路Fig.2 Research ideas of coordinated CFPREV
将邻近直流的实时换相电压状态引入原有控制策略,采用自适应控制参数取代固定的增益系数来调节控制输出,以实现以下控制目标:1)若无功交互影响较强的邻近直流换相电压仍然较低,则适当限制本地直流的触发角调整值;2)若本地直流的换相电压较低,则适当增大触发角调整值以提升自身的换相裕度;3)本地直流的控制策略不应受与其无功交互影响较弱的直流系统的干扰。
2.1.2 自适应增益系数对控制策略的影响
由式(1)可知,CFPREV 的输出取决于增益系数和电压跌落幅度。由于后者是实时变化的,尽管采用固定的增益系数,但输出值仍然是时变的。因此,将固定的增益系数替换为自适应参数,影响的是输出值的大小而未改变控制策略的本质特征。
CFPREV 本质上是以提前触发为主导的开环控制,输出值大小变化带来的“输出减小、交互影响减小”与“输出增大、换相裕度增大”之间存在相互耦合和博弈。如附录A 图A2 所示,若减小增益系数以限制触发角调整值,虽减小了无功消耗但可能会增大本地换相失败的风险;若增大增益系数以提高触发角调整值,虽提升了本地的换相裕度,但无功消耗及交互影响亦随之增大。因此,根据多直流换相电压的相对状态确定合理的增益系数,是实现协调控制目标的前提和关键。
2.2 多直流系统换相电压状态
为表征邻近直流的整体换相电压状态,将各换相电压加权求和:
式中:VA,i为邻近直流等效换相电压;kj为各邻近直流系统的电压权重系数;VL,j为邻近直流系统j的换相电压;n为直流系统回数;下标i和j分别为本地直流和邻近直流系统编号。
权重系数kj应有式(8)所示的数学约束:
根据其物理意义,kj应取决于邻近直流换相电压对本地直流无功扰动的灵敏度,这意味着更易受本地直流无功扰动影响的邻近直流的换相电压在反映整体电压状态时具有更高的权重。
交流系统的潮流方程如式(9)所示:
式中:ΔP和ΔQ分别为有功功率和无功功率的变化量;Δθ和ΔV分别为节点电压相角和幅值的变化量。
其中,子矩阵K和J的元素可由式(10)得到:
式中:Vi和Vj分别为节点i和j的电压;Bij为节点阻抗矩阵的虚部;h和o分别为节点数和PQ节点数。
考虑到直流系统馈入的功率,需对上述子矩阵进行修正。由于其与电压相位无关,仅需对子矩阵J中表征换流母线节点的对角元素Jii进行修正:
式中:Qi为直流系统在节点i馈入的无功功率。
根据换流器运行方程,直流电流Id和直流电压Ud可由式(12)计算得到:
式中:N为逆变器桥数;KT为换流变压器变比;Xc为换相电抗;VL为换相电压。
结合图1 所示的电角度关系,由式(3)和式(12)可得到直流系统消耗的无功功率为:
由式(14)可计算邻近直流换相电压对本地直流无功扰动的灵敏度。根据权重系数的物理意义,kj可由式(15)确定:

基于稳态潮流方程得到的无功电压灵敏度,在性质上类似多馈入交互作用因子。虽均不是精确的暂态计算值,但能较准确地反映直流交互影响程度的相对大小。权重系数kj在数学计算上是各回直流无功电压灵敏度在整体中所占的比重,在物理意义上则是协调控制时各回直流换相电压状态对本地直流的相对重要程度。尽管故障下交互影响程度的精确值可能会有变化,但kj作为一个表征相对大小关系的系数,其精度能够满足协调控制的需求。
但仅依据邻近直流换相电压调节增益系数仍然存在缺陷和偏差。若本地直流与其他直流的整体无功交互影响较小,盲目考虑较低的其他直流换相电压可能会限制触发角的调整,进而削弱对本地换相失败的抑制作用。因此,有必要引入本地直流换相电压及其相对权重,如式(16)所示:
式中:Veq,i表示对于直流系统i而言的多直流等效换相电压;VL,i为各本地直流系统的换相电压;Li和Ai分别为本地电压和邻近电压的权重系数。
显然Li和Ai应具有式(17)所示的数学关系:
Veq,i表征了对本地直流系统i而言的多直流实时换相电压状态,其包含本地电压项和邻近电压项。
若本地直流与其他直流具有较强的无功交互影响,则应将Li设置在较低水平以充分考虑邻近电压状态。此外,换相失败造成的有功功率冲击也是影响电力系统稳定性的关键因素,若本地直流与其他直流仅有较弱的无功交互影响或换相失败造成的有功功率冲击较大,则应将Li设置在较高水平,以更多考虑本地电压状态来确定控制策略,从而促进自身恢复。
因此,Li(或Ai)应仅取决于直流系统的固有特性,即有功功率冲击和无功交互影响。定义式(18)所示的指标以表征上述两方面因素的综合比较,其值越小则表明与其他直流的无功交互影响程度越大,其值越大则意味着对系统稳定性的影响更多来源于本地的有功功率冲击。
式中:λi和φi分别为对有功功率冲击和无功交互影响程度的评估指标。
有功功率冲击影响程度主要包含2 个方面:1)换相失败引起的有功功率冲击大小;2)消纳不平衡能量的交流系统开机容量。显然,较大的冲击幅度和较小的开机容量会导致有功功率冲击影响较大。
根据故障后暂态过程中的有功功率特性,可以近似量化功率冲击幅度ΔE[24]:
式中:t为有功功率Pd恢复到稳态运行期间所传输的有功功率Pd0所需要的时间。
考虑到直流换流母线处的短路容量与交流系统中发电机的开机容量成正相关,故可由式(20)对λi进行量化。λi的值越大,则本地直流系统i的有功功率冲击影响程度越高。
式中:ΔEi为直流系统i的有功功率冲击幅度;Si为直流系统i换流母线处的短路容量。
无功交互影响程度主要与3 个方面的因素有关:1)固有的无功扰动幅度;2)与其他直流的整体电气耦合程度;3)交流系统对本地电压的支撑能力。同理,较高的扰动幅度或耦合程度以及较弱的本地电压支撑能力,会导致较大的无功交互影响。
由于在恢复过程中直流从交流系统吸收的无功功率与其稳态运行期间消耗的无功功率成正相关,本地直流的固有无功扰动幅度ηi可由式(21)衡量:
式中:各变量含义同前所述,下标i表示直流系统i的电气量。
交流系统通常基于阻抗矩阵来表征节点之间的电气耦合程度,考虑本地直流三级传输断面内的交流节点,将节点阻抗进一步扩展以评估本地直流与其他直流的整体电气耦合程度:
式中:Di表示直流系统i与其他直流的耦合程度;Zl-k为以阻抗计算的节点l与k之间的电气距离;l为直流系统i三级传输断面内的所有节点(总数为m);k为其他直流系统的换流母线节点;Zll、Zkk为自阻抗;Zlk为互阻抗。
多馈入短路比反映了受端交流系统对本地直流的电压支撑能力[1],故无功交互影响程度φi可由式(23)进行评估。φi的值越大,则本地直流i与其他直流的无功交互影响程度越高。
式中:Ri为多馈入短路比。
从电气耦合的视角,复杂电力系统本质上是一个异质无标度网络,其中绝大多数节点在网络中具有相近数量级的耦合程度[25]。λ和η本质上反映的是有功和无功的线性比例,故式(18)所定义的各直流影响程度评估指标具有相同的数量级。由于Li仅取决于有功功率冲击和无功交互影响之间的综合比较,各直流Li之间的差异程度需与ξi之间的差异程度对应一致。因此,其二者之间的对应关系根据物理意义可近似用正相关的线性函数来描述:
式中:c和d分别为线性函数的斜率和截距。
若与强无功交互影响相比,有功功率冲击可以忽略,则ξi和Li的值均为0,此时式(16)即为式(7)所示的简单形式。故线性函数的截距应为0,其延长线将穿过坐标原点。
同理,若不考虑无功交互影响,则ξi趋近于无穷大且Li取为1,即仅考虑本地直流的换相电压:
由于有功和无功固有的耦合关系而不能将其完全割裂,将自变量趋近于无穷大的条件转化为取最大值的情况,如式(26)所示:
式中:ξi,max为ξi中的最大值。
因此,各直流本地换相电压的权重系数可由各自的影响程度指标唯一确定,如附录A 图A3 所示。显然有功冲击越小,无功交互影响越大,则Li越小,邻近直流换相电压的相对重要程度越高。
综上所述,式(16)所表征的换相电压状态Veq,i:在构成要素上包括本地电压项和邻近电压项,单馈入直流系统中Li恰取为1,此时邻近电压项为0;在参数类型上包括离线参数和实时参数,其中权重系数基于有功功率冲击和无功交互影响等固有特性离线确定,而各直流换相电压为实时的在线变量,表征了多馈入直流系统实时的暂态情况。
2.3 多直流CFPREV 协调控制策略
基于多直流系统换相电压状态,根据控制目标构造附加调节系数如式(27)所示,将其与初始增益系数相乘从而实现对增益系数的自适应调节。
式中:Ki为附加的调节系数;Gi为原有固定的增益系数;G'i为自适应增益系数。
调节系数本质上是一个无量纲的比例系数,反映了多直流换相电压与本地直流换相电压的相对关系。其中Li(或Ai)决定了调节程度,无功交互影响越强,则对增益系数的调节程度越大,显然不考虑无功交互影响时调节系数为1;kj则决定了各邻近直流换相电压对调节系数的影响程度,与本地直流无功交互影响越强,则对调节系数的影响程度越大。在调节系数作用下,若无功交互影响较强的邻近直流换相电压仍处于较低水平,则能够减小增益系数从而限制输出的触发角调整值;若本地直流换相电压相对较低,则能够适当增大增益系数以提升自身的换相裕度。
CFPREV 协调控制的具体控制逻辑如图3 所示,将其应用在多馈入直流系统中每一回直流的控制策略当中,显然每一回直流对其自身而言即为本地直流系统。图3 中:T表示传输延时;N/D环节表示N除以D;上下两部分协调控制策略分别对应于原控制策略中的不对称故障模块和对称故障模块。
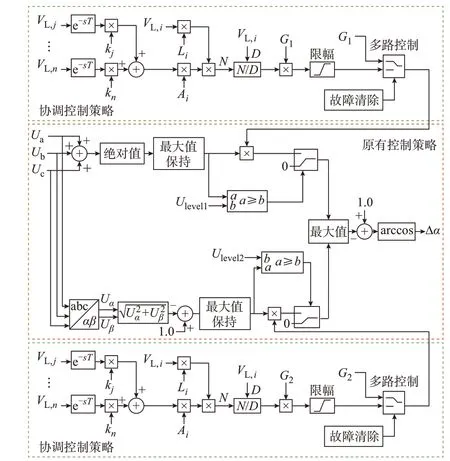
图3 CFPREV 协调控制框图Fig.3 Block diagram of coordinated control for CFPREV
经相应的传输延时将其他直流换相电压与本地直流换相电压加权求和得到增益系数的附加调节系数。直流系统间通信传输延时对协调控制效果的影响来源于对实时换相电压的表征准确度。显然,过长的延时无法准确反映实时的电压状态,而当已能够较准确反映实时电压状态时,尽管考虑不同传输延时会导致输入的等效换相电压的具体数值不同,但对于实时连续的控制方式而言不会对控制效果造成本质的影响。实际工程中整流站与逆变站间的通信延时约为20~30 ms,考虑到逆变站间较短的空间距离,20 ms 传输延时条件能够满足协调控制的需求。
协调控制的输出包含限幅环节,其确定了增益系数的调节范围,显然过小的调节范围难以取得预期的控制效果。而根据前文分析,减小增益系数虽减小了对邻近直流的不良影响,但可能会削弱对本地换相失败的抑制作用;增大增益系数以提升自身的换相裕度时,增加的无功消耗可能又会恶化交互影响。故为减小增益系数调节带来的负面影响,其调节范围也不应过大。
文献[7]指出减小触发角时,其瞬时调整值不宜超过0.476 rad。文献[8]则研究得出,当触发角的瞬时调整值超过式(28)所示临界值Δαmax,将导致电压下降、电流上升而引起额外的换相失败。
式中:αorder和γref分别为逆变侧触发角和关断角的稳态参考值;γmin为换相失败的临界关断角。αorder、γref、γmin的取值一般约为140°、15°和7°。
综合上述分析可知,当邻近直流换相电压较高,协调控制增大增益系数以提升本地换相裕度时,CFPREV 的输出不应超过约27.2°,即式(2)有:
考虑最极端的情况即电压跌落1.0 p.u.,代入不等式(29)可得:
增益系数初始值最大一般可设置为0.1[23],故本文将限幅范围保守取值为初始值的10%。这一限幅范围也能够保证在增益系数减小时,CFPREV 输出不至于被限制得过小而增大本地换相失败的风险。当增益系数初始值取为0.075,电压跌落超过0.15 p.u.时,即使在暂态过程中由于考虑邻近直流较低的换相电压而需减小增益系数,本地CFPREV的输出亦能保持在8°以上。
3 算例分析
3.1 仿真系统和参数
基于CIGRE 直流标准模型在PSCAD/EMTDC 中搭建了附录A 图A4 所示的仿真系统,直流输送功率为1 000 MW,阻抗参数如附录A 表A1所示。将传统CFPREV 和协调CFPREV 分别引入各直流控制环节进行对比分析,控制参数的初始值如附录A 表A2 所示[8,23],协调CFPREV 中的权重系数计算结果如附录A 表A3 所示。根据2.3 节分析,考虑通信传输延时为20 ms,限幅环节的上下限分别设置为0.082 5 和0.067 5。
3.2 对称故障分析
在直流3 换流母线处设置接地电感为0.20 H 的三相故障,发生于1.0 s 且持续0.05 s。图4(a)和(b)中的关断角曲线表明,所提协调控制方法有效抑制了多直流的连锁换相失败,其控制机理可解释如下。考虑到直流3 较低的换相电压及无功交互影响,直流2 中CFPREV 的增益系数在恢复过程中被限制在较低水平。较小的增益系数减小了输出的触发角调整值,从而减小了无功消耗并提升了直流3的换相电压及关断角,其换相失败的抑制亦促进了直流2 的恢复。考虑邻近直流换相电压状态实时调节增益系数的过程如图4(e)和(f)所示。
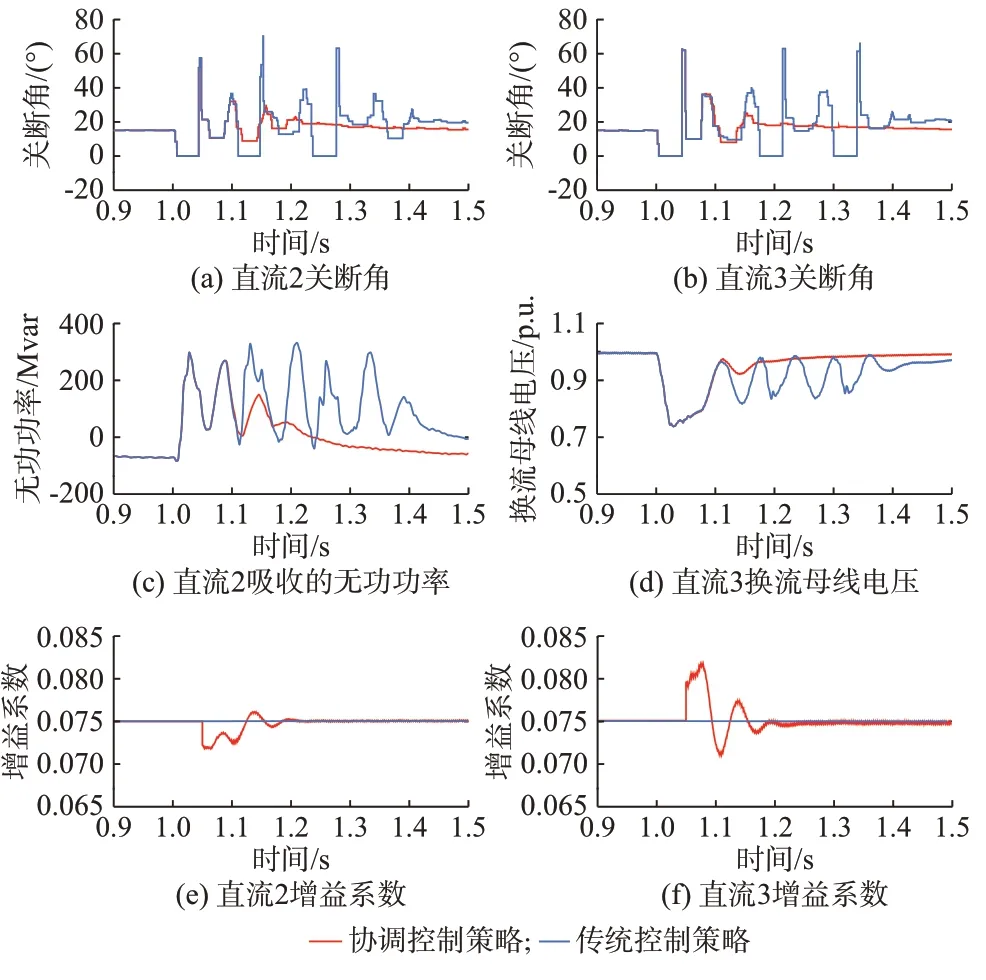
图4 三相故障下的直流系统响应(接地电感为0.20 H)Fig.4 Responses of HVDC system with three-phase fault(grounding inductor is 0.20 H)
直流3 换流母线1.0 s 发生接地电感为0.07 H的三相故障,持续时间为0.05 s。附录A 图A5 中的响应曲线表明,连锁换相失败在协调CFPREV 的控制下得到有效抑制。而直流1 中协调CFPREV 的增益系数与传统控制一致,表明其触发角控制不受与其无功交互影响较弱的直流系统电压状态的干扰。
为进一步验证所提方法的有效性,在直流3 换流母线设置持续0.05 s、具有不同严重程度及故障时刻的三相故障,不同控制方法下的换相失败次数如附录A 表A4 和表A5 所示。由表A4 和表A5 可见,协调控制方法总体效果较好,故障集中连锁换相失败得到有效抑制的故障比例达到约28.4%。但在约8.8%概率的少数情况下,协调控制方法可能会造成负面影响,原因在于:CFPREV 是以提前触发为主导的开环控制,其输出本质上存在一定的盲目性,且如前文分析,“输出减小、交互影响减小”与“输出增大、换相裕度增大”之间相互耦合和博弈,故难以获得普遍的最优效果。
3.3 不对称故障分析
在直流2 换流母线处设置接地电感为0.004 H的单相故障,发生于1.0 s 且持续0.1 s。相关电气量的暂态响应如图5 所示。根据关断角曲线和增益系数曲线可知,考虑多直流实时电压状态对增益系数进行协调控制有效抑制了连锁换相失败。

图5 单相故障下的直流系统响应Fig.5 Responses of HVDC system with single-phase fault
在直流2 换流母线设置持续0.1 s、具有不同严重程度及故障时刻的单相故障,不同控制方法下的换相失败次数如附录A 表A6 和表A7 所示。协调控制的整体效果与对称故障时一致,但相同接地电感下单相故障引起的换相失败次数较少,协调控制对发生多次换相失败的严重情况更为敏感。此外,由轻微故障情况可以看出,当交流故障未引起换相失败时,协调控制不会导致额外的换相失败。
3.4 与现有方法的对比
本节进一步将协调控制方法与文献[23]所提控制方法进行了对比分析。在文献[23]中,以换流母线电压跌落最严重的直流作为控制对象:若其他直流的关断角跌落最大值超过2.5°,则将该直流的CFPREV 增益系数挡位切换至0.065;若其他直流的关断角跌落最大值超过5°,则将增益系数挡位切换至0.05。与该方法相比,本文所提方法的优越性主要体现在以下2 个方面。
1)控制的连续性
本文所提方法各回直流的增益系数均处于连续的实时控制,而对比方法仅针对电压跌落最严重的直流进行控制,且增益系数的调节采用挡位切换方式,控制对象及控制挡位的频繁切换导致控制过程呈现离散化的特征。
设置直流3 换流母线在1.0 s 发生持续0.05 s、接地电感为0.281 H 的三相故障,不同控制方法下的暂态响应如图6 所示。直流2 的关断角跌落幅度于1.11 s 超过5°,此时直流3 为对比方法的控制对象,其增益系数应由0.075 切换为0.05。受通信延时影响,挡位于1.13 s 完成切换。但直流2 关断角处于快速下降阶段,当增益系数经延时后调节到位,直流系统已发生换相失败进而影响后续的恢复过程。由此可见,对比方法离散化的控制方式在通信延时的影响下,难以较好地跟踪关断角快速跌落的暂态过程。而在本文方法控制下,两回直流的增益系数在1.11 s 前均处于连续的调节中,连续性的控制提升了对换相失败的抑制效果。
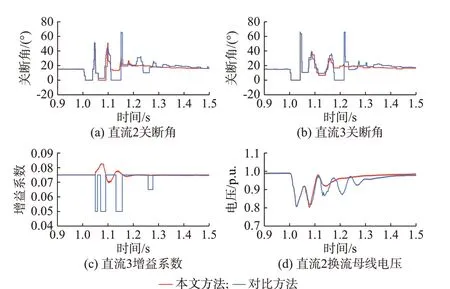
图6 与文献[23]方法的对比(场景1)Fig.6 Comparison with method in reference [23](scenario 1)
2)场景的适用性
对比方法未考虑本地直流换相裕度且增益系数只能按固定挡位调节。但作为控制对象的本地直流换相裕度本就较小,盲目减小增益系数可能会增大本地换相失败的风险。而本文控制方法基于多直流换相电压的相对状态灵活调节各回直流的增益系数,在不同故障情况和场景下的适用性较好。
直流3 换流母线在1.0 s 发生三相故障,接地电感为0.077 H,持续时间为0.05 s,不同控制方法下的暂态响应如附录A 图A6 所示。在1.12~1.16 s 时间段内,直流3 换相电压较小,故作为对比方法的控制对象,但过小的增益系数削弱了对本地换相失败的抑制作用。而采用本文方法时,根据换相电压相对状态确定增益系数对两回直流同时进行调节,较高的增益系数有助于抑制直流3 的本地换相失败,从而促进多直流协调恢复。
4 结语
本地直流的触发角调节可能会引起多直流连锁换相失败,应考虑无功交互影响对CFPREV 进行协调控制,根据多直流实时换相电压状态对其增益系数进行自适应调节,能够有效降低多直流连锁换相失败的风险。需要指出的是,协调控制依赖于多直流实时状态的信息交互,目前同一直流的整流侧与逆变侧已能实现快速通信,但不同直流逆变站之间信息交互的工程条件有待完善。后续将进一步深入研究多直流暂态无功交互特性,并结合工程实际条件提升协调控制的性能和效果。
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx),扫英文摘要后二维码可以阅读网络全文。
猜你喜欢
宁夏电力(2022年1期)2022-04-29
北京航空航天大学学报(2021年6期)2021-07-20
电子制作(2019年19期)2019-11-23
测控技术(2018年3期)2018-11-25
电子制作(2018年19期)2018-11-14
通信电源技术(2018年3期)2018-06-26
自动化学报(2017年4期)2017-06-15
电子制作(2016年1期)2016-11-07
海峡科技与产业(2016年3期)2016-05-17
中国塑料(2015年3期)2015-11-27