
Proactive Platooning Based on C-V2X to Relieve Congestion at a Signalized Intersection
2023-03-12 12:01WeiGaoYanShiShanzhiChen
China Communications 2023年2期
Wei Gao,Yan Shi,*,Shanzhi Chen
1 The State Key Laboratory of Networking and Switching Technology,Beijing University of Posts and Telecommunications,Beijing 100876,China
2 The State Key Laboratory of Wireless Mobile Communications,China Academy of Telecommunications Technology,Beijing 100083,China
Abstract: Nowadays urban traffic congestion becomes a major issue due to the increase in vehicles that lead to more commuting time,accidents,traffic violations,and high fuel consumption.Platooning is a good way to solve traffic congestion because it drives with a smaller inter-vehicle distance than human-driving.This paper proposes proactive platooning based on CV2X (cellular vehicle-to-everything) to relieve congestion.Proactive platooning reduces the inter-vehicle distance and increases the throughput of signalized intersections through integrating the networked control platooning and computation-centralized platooning.Model and simulation experiments of proactive platooning were conducted to verify the impact of inter-vehicle distance on platooning latency,platooning safety,and traffic throughput.Simulation results show that the optimal inter-vehicle distance under proactive platooning is less than half of humandriving at a signalized intersection.
Keywordst: platooning communication; platooning safety;C-V2X;signalized intersection
I.INTRODUCTION
Traffic congestion is a serious problem,it will increase the commuting time of people and result in the loss of economic property [1].Road congestion can be divided into two situations,one is two-way congestion,and the other is congestion in one direction.The former is due to the number of vehicles exceeding the saturated flow of the road,and the latter is caused by the traffic flow guiding error.However,no matter what the situation is,signalized intersections are the key to solving traffic congestion.
In order to solve congestion at a signalized intersection,traffic light control strategy,bus priority,road priority,platooning,etc.have all been proposed[2,3].These methods are all designed to solve the congestion caused by human-driving vehicles.With the development of autonomous driving,more and more autonomous vehicles appear on the road.The mixed situation of human-driving vehicles and autonomous vehicles is called a heterogeneous vehicle traffic environment.With the increased autonomous vehicles penetration rate,the portion of the smooth drive is increased [4].Therefore,heterogeneous vehicles will be the main cause of future traffic congestion.In order to ensure the safety of passengers when an autonomous vehicle passes through a signalized intersection,a large inter-vehicle distance is required.This weakens road capacity and easily causes heterogeneous vehicle traffic congestion.
For the congestion caused by heterogeneous vehicles,Dresner and Lee use road design without traffic lights to solve it [5].Feng et al.consider the optimal traffic signal control to release traffic congestion[6].Levin et al.use LACS (lane alternating control scheme) to improve intersection capacity and reduce vehicle latency in an autonomous driving environment [7].Similarly,people commonly use traffic light scheduling strategies such as the TSP [8] to relieve congestion.Combining with the priority direction of the road,PURTHPG [9] and MELANIEJ[10] with the direction of the bus are proposed to increase traffic efficiency.However,PURTHPG and MELSNIEJ ignore the direction of ordinary vehicles.Considering the ordinary traveling direction,Sun et al.propose the LOS-based non-priority vehicle scheduling method[11].In general,these are some traditional ways to solve traffic congestion,which are not suitable for the traffic congestion caused by the rapid development of autonomous vehicles.
With the development of autonomous driving,the Society of Automotive Engineers (SAE) divides the level of self-driving vehicles to L0,L1,L2,L3,L4,L5.Since L0-L4 vehicles have already running on the road,heterogeneous vehicle management is a big problem.For example,when the L4 vehicles drive on the road,the L4 vehicle always has a bigger intervehicle distance because the perception range and predictability of one automatic vehicle to external accidents are weaker than that of humans[12].Therefore,in order to relieve signalized intersections congestion,the idea of platooning is adopted to relieve traffic congestion.In paper[13],a solution is presented using the cooperative adaptive cruise control(CACC)of vehicle platoons waiting at a red traffic signal which enables vehicles to begin accelerating in a coordinated manner once the traffic signal turns green.In paper [14],Hardes et al.propose a fuel-efficient strategy for platoon formation at signalized intersections and investigate its performance using realistic simulation models of vehicle dynamics,platooning controllers,and wireless networking.
In general,this paper proposes proactive platooning combining networked control platooning and computation-centralized platooning to relieve heterogeneous vehicle congestion at a signalized intersection.Under the premise of ensuring platooning safety,the throughput at a signalized intersection is improved.The main contributions of the paper are as follows:
・ Networked control based on C-V2X is designed to reduce proactive platooning communication latency.The platooning communication model is established to analyze the factors that affect the proactive platooning.
・ Computation-centralized platooning is used to reduce the computational task of vehicles.At the same time,platooning control based on constant distance is used to ensure platooning safety.
・ Combining with proactive platooning communication and control analysis,the proactive platooning flow chart and algorithm are established.By analyzing the formation process of proactive platooning,it is found that the key influencing factor of proactive platooning is inter-vehicle distance.
・ Optimal inter-vehicle distance for proactive platooning is given,according to simulation results of throughput at a signalized intersection.
The rest of this paper is organized as follows.Proactive platooning as a new way to deal with heterogeneous vehicle congestion is proposed in Section I.networked control platooning,computation-centralized platooning,platooning communication,and platooning control are introduced in Section II.The model of proactive platooning based on C-V2X including proactive platooning communication and proactive platooning control schemes are discussed in Section III.The algorithm of proactive platooning is given in Section IV.Simulation analysis of proactive platooning at a signalized intersection is shown in Section V.Concluding remarks and future work are presented in Section VI.
II.RELATED WORK
The main contributions of our mechanism benefit from many existing representative work.In this section,we first review the typical work of networked control platooning and computation-centralized platooning.We then analyze platooning communication and platooning control.
2.1 Networked Control Platooning
Networked control is a way to realize networked control platooning [15].In networked control,the platooning system needs a centralized node to collect,compute and send the control information.The centralized node in the platooning can be the platooning leader or a fixed point with communication and computing functions on the roadside.In paper [16],Wen et al.propose a method of optimal relay vehicle for improving channel environment and control power to ensure communication link reliability under platooning leader manages.In paper [17],Heinovski et al.formulate an optimization problem and develop a set of centralized and distributed protocols to support platoon formation.In paper [18],Bohm et al.propose a solution that using a dedicated service channel by a centralized media access control (MAC) for platooning applications.No matter which networked control platooning,platooning members need to be equipped with platooning controllers.The platooning controller is not the electronic control unit(ECU)to control the vehicle motion state but adjust the vehicular motion to meet the platooning safety requirements according to the other vehicle dynamic information.Platooning safety is defined that adjusting the inter-vehicle distance and making the maximum inter-vehicle distance error is less than the set constant distance when the ECU receives the information of platooning formation with desired inter-vehicle distance.In general,platooning controller is a communication unit with computing power.networked control platooning is centralized scheduling of communication resources to meet the needs of platooning safety.Furthermore,platooning safety means that the vehicles in the platooning are safe,and the people in the vehicles are safe.
2.2 Computation-Centralized Platooning
Computation-centralized platooning is a way to realize platooning based on Mobile Edge Computing(MEC).All the computing tasks of the platooning are concentrated on the edge nodes,so as to reduce the computing task of the onboard computer.For heterogeneous vehicles,not every vehicle has an onboard computer.Using MEC can solve the problem of platooning computing tasks.Huang et al.propose the MEC-based vehicular cloud of Cooperative Adaptive Driving(CAD)approach to avoid shockwaves efficiently in platoon driving [19].Dabbene et al.propose a high-level architecture for MEC-assisted platooning control that allows several automotive applications to be offloaded from the vehicles to the edge[20].Chen et al.propose a path planning scheme that using deep reinforcement learning on the network edge node to improve the driving efficiency of an autonomous vehicular platoon in terms of fuel consumption[21].In general,the function of the computing nodes is to calculate the desired motion state of platooning members according to the set platooning control mode.When the decrease in the demand for vehicle computing,the vehicle price will be decreased.Therefore,the computation-centralized platooning scheduling plays a positive role in promoting the development of automatic driving in the future.
2.3 Platooning Communication
Platooning communication includes communication topology,communication modes,and communication quality.Communication topology includes predecessor-following (PF),predecessor-leader following (PLF),two predecessor-following (TPF),two predecessor-leader following (TPLF),bidirectional(BD),etc.Communication modes include unicast,multicast,and broadcast.The latency in platooning communication quality directly affects platooning safety.Communication topology and modes determine the communication quality.For example,in PF topology,communication latency is cumulative.Murillo et al.illustrate numerically how the error due to said saturations may propagate along the PF topology string,losing the string stability property of the multi-agent system [22].The communication mode always determines the size of the platoon.For example,in broadcast mode,the platooning size is limited by the range of broadcast.Gao et al.use the granulated method to solve the limitation of the broadcast range of the platooning leader in the long platooning and expand the platoon on the premise of ensuring the platooning consensus[23].Therefore,we consider the platooning latency in combination with communication topology and communication modes in this paper.
2.4 Platooning Control
Platooning control can be divided into centralized control or decentralized control according to the position of the platooning controller,lateral control or longitudinal control according to the direction of vehicle movement,and event-triggered platoon or timetriggered platoon according to the factors triggering platooning stability.Centralized control means that the platooning controller is placed at the leader,and platooning members are under the command of the leader to adjust the platooning inter-vehicle distance error [24].Decentralized control means that the platooning controller is placed on all vehicles,and the vehicles automatically adjust motion states to meet the set constant distance of platoon according to others dynamic information[25].Lateral control means that the vehicles always keep a set constant distance from the roadside [26].Longitudinal control means that the vehicles always keep a set constant distance from the vehicles in front of them [27].In order to avoid unnecessary information transmission in wireless networks,the event-triggered platoon transmits the necessary vehicle state according to the required control information[28].Time-triggered platoon means that the platooning will not depend on the system parameters and initial conditions at any time,but will control the platooning formation according to the change of time[29].The classic platooning control schemes include adaptive cruise control (ACC) [30] and cooperative adaptive cruise control (CACC) [31].ACC is a platoon based on decentralized control,which supports longitudinal control.CACC is a platooning based on centralized or decentralized control,which also supports longitudinal control.In this paper,we design the proactive platooning control scheme based on the classic CACC platoon with constant distance.
III.THE MODEL OF PROACTIVE PLATOONING BASED ON C-V2X
This section discusses the proactive platooning that combines networked control platooning and computation-centralized platooning.We establish a proactive platooning scene based on C-V2X and analyze the communication and control in proactive platooning according to the idea of networked control platooning and computation-centralized platooning.The centralized node of platooning is called the PL(platooning leader)and platooning vehicles are called the PMs (platooning members).As depicted in Figure 1,PL consists of an RSU (road side unit) and a CU(computing unit)at the traffic light.
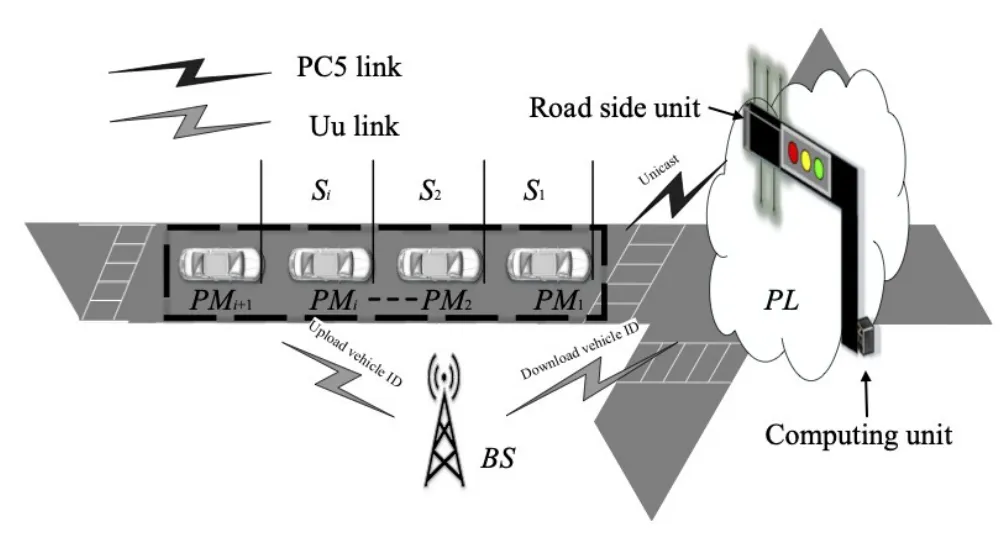
Figure 1.Proactive platooning based on C-V2X at a signalized intersection.
At the signalized intersection,it is very difficult to construct communication topology and ensure communication quality due to the uncertainty of vehicles’direction and type.If the vehicle is PL,it may be replaced frequently and cause huge network and computing overhead.We consider the RSU as the networked control node responsible for platooning communication.The networked control node is responsible for transmitting the desired platooning information including desired inter-vehicle distance,desired acceleration to PMs.In order to compute desire platooning information,we adopt the method of computationcentralized platooning to meet the computing needs of different vehicles such as some vehicles have computing power,while others do not.Computationcentralized platooning not only provide computing services for heterogeneous vehicles but also reduce the computing tasks of vehicles.
Proactive platooning occurs when there is congestion at a signalized intersection.Platooning controllers and network devices of proactive platooning are concentrated at a signalized intersections,while PMs are controlled by PL.The general idea of the formation of proactive platooning is as follows.When a signalized intersection is congested,the PL downloads the GPS (global positioning system) information of vehicles from the nearby BS,and then the CU uses the GPS information to obtain the vehicle ID with the front and rear vehicle information.Then the vehicle ID is used for proactive platooning control to ensure platooning safety.In this process,GPS information uploads from vehicles to BS is completed before PL downloads GPS information.In proactive platooning,vehicles run the platooning information,and the platooning error is eliminated by human or automatic driving technology.The latency caused by GPS upload is eliminated by platooning control schemes.In this paper,we separate the closed-loop system of the platoon into two closed-loop systems,such as communication and control,which interact to eliminate the platooning error.Therefore,the upload of GPS information is not within the control cycle of vehicles.
Platooning information in C-V2X networks can be classified into safety applications,such as collision alarm,road congestion,and vehicle control.Vehicleto-vehicle (V2V) communications in C-V2X technology play a crucial role in vehicular safety applications,in which directly exchanging messages informing about vehicle location,direction,and speed can meet the appropriate Quality-of-Service(QoS)requirements[32,33].In proactive platooning,only vehicle control information is transmitted between vehicles and the PL,the existing V2V communication technology can almost meet the QoS requirements for proactive platooning.So as to avoid excessive platooning latency caused by lack of resources.This is why we choose C-V2X communication technology in proactive platooning.
3.1 Proactive Platooning Communication
According to the scenario in Figure 1,we designed the following simplified model to analyze proactive platooning communication.As shown in Figure 1,the platooning topology is a bidirectional leader (BDL)topology.BDL topology means that the link between PMs and PL is double communication,and there is no information exchange between vehicles.PMs not only receive the platooning information from RSU but also upload their own motion state information to RSU.This closed-loop communication is divided into two parts,one is the information received by PM and the other is the information sent by PMs.PMs receive the desired platooning information,which is directly transmitted to the controller or person in the vehicle.The information sent by PMs is transmitted to CU,which is responsible for computing the desired platooning information.
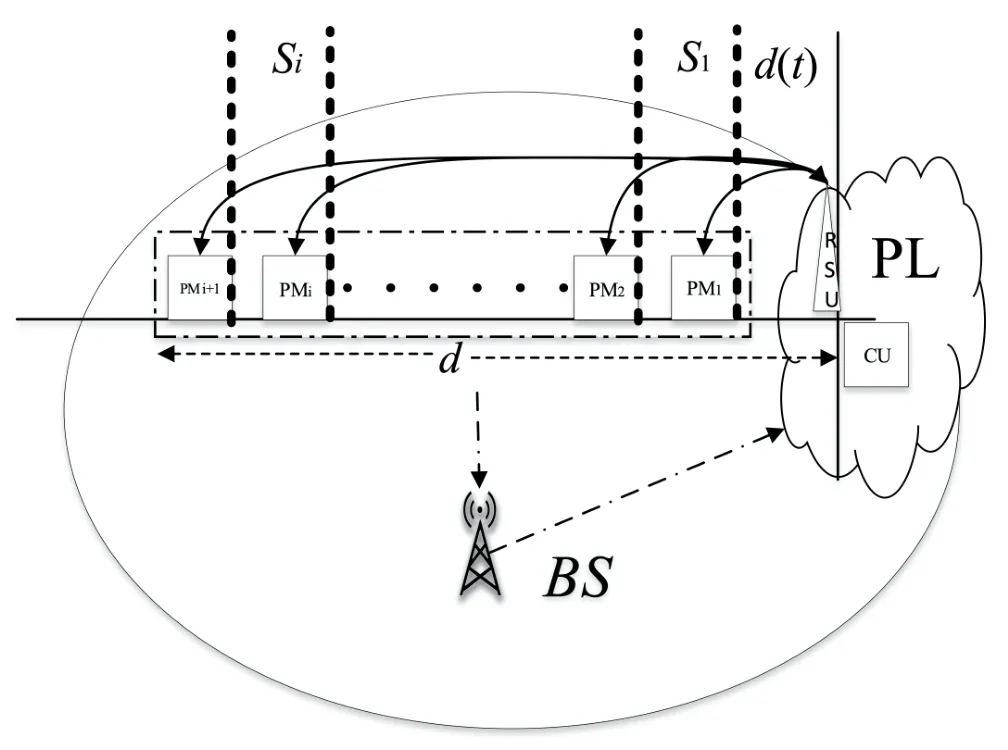
Figure 2.The information flow model at a signalized intersection.
The networked control in proactive platooning is responsible for the communication of one or more platoon.The information flow is shown in Figure 2.Wheredis the distance between the last vehicle in the queue to be formed platoon and the center point of the signal intersectiond=d(t)+iis the number of vehicles,andNis the number of all vehicles within proactive platooning,liis the length of the vehiclei.Siis the head distance between vehicleiandi+1.Si −liis the inter-vehicle distance between vehicleiandi+1.PMiis the i-th vehicle of PMs.
Cui et al.divide licensed spectrum into multiple RBs (resource blocks) with the same bandwidth and distribute dedicated RBs to PMs to transmit control messages[34].Ashraf et al.point out that 3GPP R16 supports platooning unicast,and the max end-to-end latency is 10ms [35].Due to the unpredictability of PMs’ direction,speed,and acceleration,the desired acceleration message of vehicles in the proactive platooning is different.Therefore,the control message received by each vehicle is different for the process of platoon formation under a heterogeneous vehicle environment.Finally,the PL transmits desired acceleration messages by unicast is considered to an appropriate communication mode at a signalized intersection.
Paper[36]points out that the control cycles of typical longitudinal platooning controllers are in the range of 10ms,including information collection,computation,transmission,and necessary control for high density platooning.According to the components of platooning control cycle time,the following analysis is made.The platooning vehicles have been connected to the network and uploaded GPS information in realtime.The information collection time in the control cycle has been completed before the platooning enters a signalized intersection.The algorithm time of computing the platooning desired acceleration is very short,which can be ignored.Because the necessary control needs to be completed in the control cycle,the platooning information transmission must be less than 10ms.Therefore,proactive platooning latency should be in the range of control cycle time.
In this paper,the proactive platooning latencyTis defined as the desired acceleration information transmission time from the first vehicle of PMs to the last vehicle.In order to realize the proactive platooning of a signalized intersection,the platooning latency should meet the requirements of paper[35,36].Then,we establish the following objective function.
letT1is the time interval at which the PL sends desired acceleration messages to the vehicle of PMs,λis the minimum received SINR.The outage of a communication link is defined as the received SINR falls below a predetermined thresholdλ.N0is the channel noise that satisfies independent Gaussian distribution with zero means.
Assuming that the environment is in white noise.The RSU unicast will not be affected by the cell according to 3GPP 37.885 standard[37].Tcan be constructed as follows.
whereSPLis the size of desired acceleration messages.DefineWPLis the channel power gain for the links of control messages sharing.Letis the loss power from PL toi-th vehicle of PMs.The basicV2Rpath loss model is given in[37],we can get the PL’s path loss Eq.(3).
wherefcis inGHzanddi=d(t)+Sjis the distance from PL to thei-th vehicle.d(t) is the distance between the first vehicle and PL at timetin proactive platooning.
Proactive platooning analysis based on C-V2X.
1.When the number of vehicles in the lane reaches the maximum,d(t)=0.Then,the proactive platooning rangedis a fixed value,and the value is the largest,defined as the position of the platooning alert line.
2.If the number of PMs does not reach the maximum number of vehicles in the lane,and there is a vehicle about to join the proactive platooning at a signalized intersection.This vehicle will be judged whether the proactive platooning satisfies the platooning latency requirement according to Eq.(2).If the platooning latency requirement is met,the vehicle is added to the proactive platooning.Otherwise,the vehicle will follow the preceding vehicle.
3.If the first vehicle begins to enter a signalized intersection,then the relationship betweenNandTis obvious.When the number of vehiclesNincreases,the latency timeTincreases.However,in order to suppress an increase in the platooning latency,it is necessary to reduce the number of vehiclesNand the inter-vehicle distanceSi −li.
Finally,we completed the analysis of the proactive platooning communication.In the next section,we will discuss proactive platooning control schemes.
3.2 Proactive Platooning Control Schemes
In the proactive platooning scenario of Figure 1,a computation-centralized platooning is employed.CU computes the platooning information,such as desired inter-vehicle distance,acceleration and speed,based on the vehicle motion information obtained by RSU.Under the BDL topology,CU receives the motion state information of PMs and RSU sends the desired platooning motion state to PMs.
CACC is a mature platooning method.Based on CACC platooning,this paper establishes a proactive platooning control scheme.Under CACC platooning,PMs get information not only from the predecessor vehicles but also from PL.At this time,PMs are within the communication range of PL.We establish the CACC model using constant distance to ensure vehicle safety.The platooning control model based on the world physical coordinate system is as follows[38].
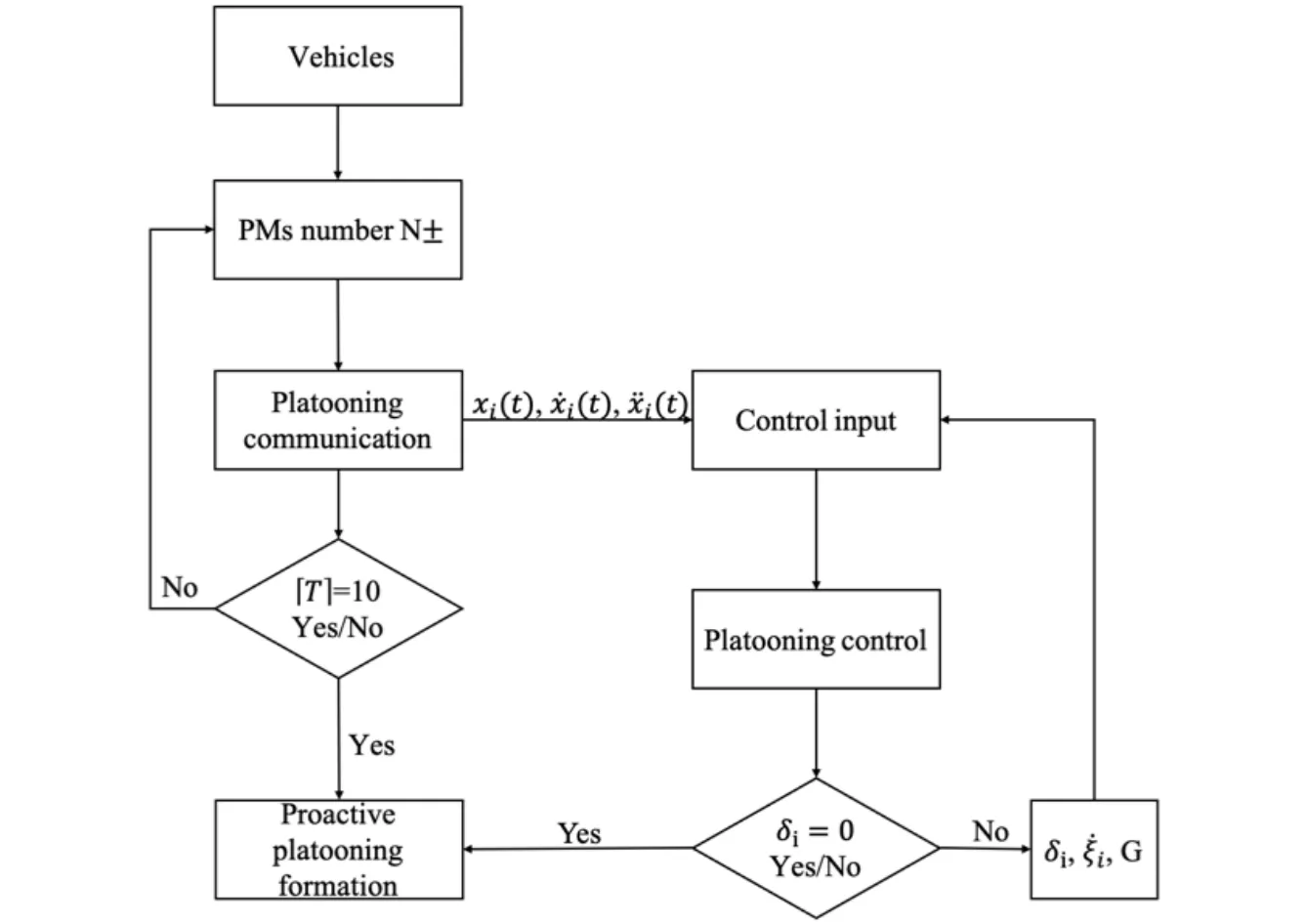
Figure 3.The flow chart of proactive platooning formation.
wheregapdesis constant distance,δiis inter-vehicle distance error,is vehicle speed error.Because the latency time of CACC from wireless is much smaller than adaptive cruising control (ACC) latency time from the sensor,we choose constant distancegapdesto represent desired inter-vehicle distanceGof CACC,not a constant time headway.(t)and(t)is speed and acceleration of leader respectively.a,b,c,d,eis parameter depicted as follows:
whereWis weighting factor between the acceleration of leader and preceding vehicle.ζis damping ratio and always be set 1.bwis the bandwidth of the controller.
According to Eq.(4),we compute the desired platooning motion information of vehicleiat each time according to the preceding vehicle and PL motion state information.But when the desired acceleration information is sent to PMs,the communication latency will always cause a control latency error.Therefore,on the basis of Eq.(4),we add the communication latency ∆tto compute the desired platooning motion state at the next moment.In order to computeandδi,let(t)=gi+(t −∆t)∆t,xi(t)=gi∆t+(t −∆t)∆t2bring these into Eq.(4),wheregiis the speed of vehicleiat timet −∆t.When the PL is RSU or CU,we set the(t)=0 and(t)=0.The proactive platooning control strategy is constructed as follows.
In order to analyze the proactive platooning safety,we establish the following error model.
whereβis acceleration error,and its variation trend represents the platooning stability.τstands for the platooning safety.We use MATLAB to simulate the acceleration error of vehicles and maximum intervehicle distance error of two vehicles in the next section.
IV.THE ALGORITHM OF PROACTIVE PLATOONING
In this section,we will give the flow chart and algorithm of proactive platooning to realize the integration of platooning communication and control.This section is the implementation process of the proactive platooning algorithm,which is the most important contribution of this paper.
In this paper,we design proactive platooning based on C-V2X and analyze the latency in platooning communication.When the vehicles enter the communication range of PL,the platooning will be formed automatically.The number of PMs increases or decreases according to the limit of platooning latency.For example,when the platooning latency is no less than 10ms,decreases the number of PMs to meet the platooning latency.Because the communication range of PL in the platoon is limited,increasing or decreasing the number of PMs means reducing or increasing the inter-vehicle distance.We also design a platooning control scheme based on the constant distance to stabilize the inter-vehicle distance error.In this process,we define platooning safety,that is,the maximum intervehicle distance error is less than the start inter-vehicle distance.When the platooning latency is satisfied and the platooning control error is satisfied,proactive platooning is formed.
The proactive platooning algorithm is divided into three parts.Firstly,all the collected vehicles’ motion state information should be sorted and classified to get the vehicle ID sequence with vehicle front and back relationship in different lanes.Secondly,the proactive platooning size is limited according to the platooning latency limitation of Eq.(1b) .Finally,the intervehicle distance errorδiis adjusted to ensure the safety of vehicles passing through the signalized intersection according to the platooning control mode designed in the second subsection.
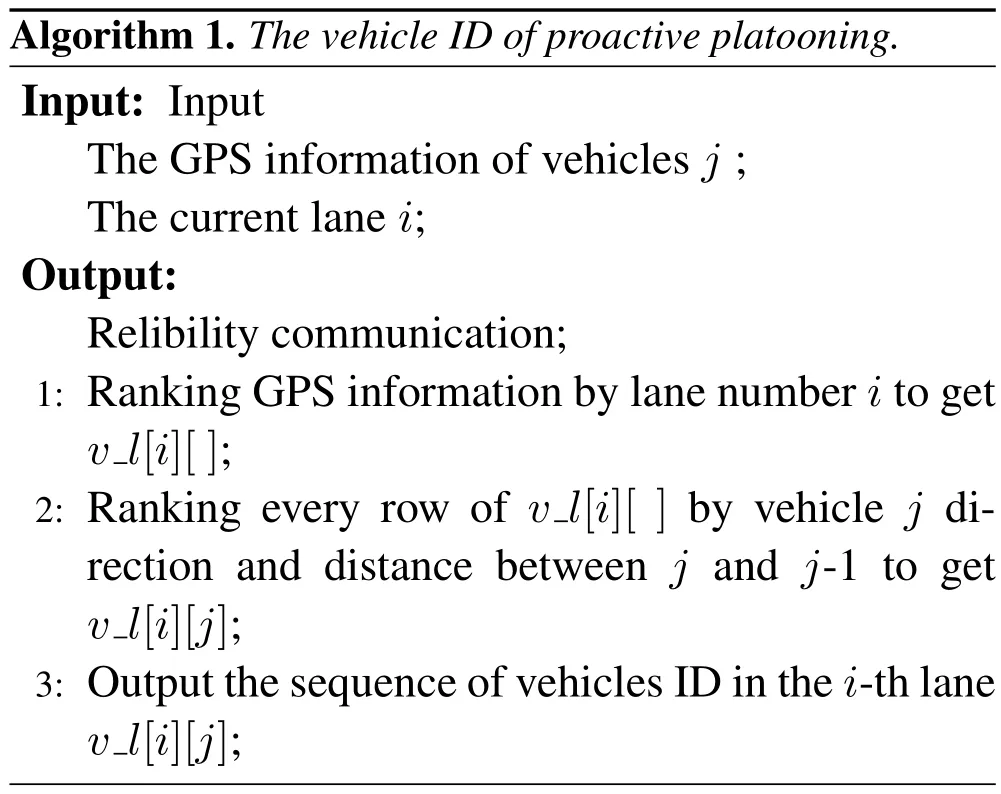
Algorithm 1.The vehicle ID of proactive platooning.Input: Input The GPS information of vehicles j ;The current lane i;Output:Relibility communication;1: Ranking GPS information by lane number i to get v l[i][];2: Ranking every row of v l[i][ ] by vehicle j direction and distance between j and j-1 to get v l[i][j];3: Output the sequence of vehicles ID in the i-th lane v l[i][j];
Four algorithms are designed in this subsection.Algorithm 1 is to provides the necessary vehicle information for proactive platooning.The Algorithm 1 can acquire the vehicle ID sequence for thei-th lane at a signalized intersection.Algorithm 2 is the platooning latency restrictions that meet the proactive platooning size,and Algorithm 3 is a platooning control scheme that ensures platooning safety.Algorithm 4 is the proactive platooning main function.
Algorithm 1,we use the sorting algorithm.Firstly,we extract the lane number from the input vehicle GPS information and divide it into different lane sequences.Then,according to the relationship between the front and back vehicle,the vehicle ID of each sequence is sorted circularly.Finally,the vehicle ID that can be used for proactive platooning is obtained.
Algorithm 2 is the process of selecting vehicles for proactive platooning.The main factor limiting the number of PMs is platooning latency,so we dynamically adjust the number of vehicles to be formed platoon until the demand of platooning latency is met.
Algorithm 3 is a process to ensure the safety of PMs for proactive platooning.In the process of platooning formation,every adjustment should be systematic,not only for a vehicle.Because the platooning stability is the stability of the system,not the stability of every PMs.However,we can not regard the platooning is safe if the system is stable.It is possible that the system is stable,but the maximum inter-vehicle distance is no less than constant distance.Therefore,we make the adjustment of inter-vehicle error as the index of platooning safety.
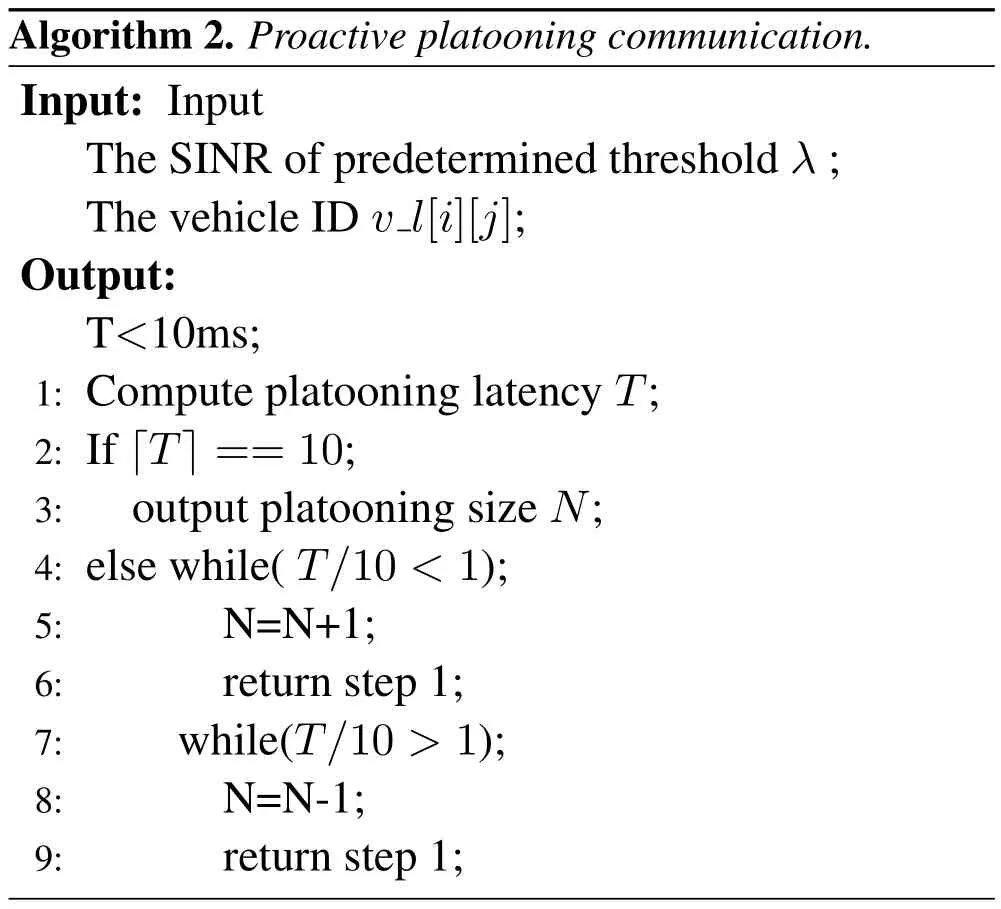
Algorithm 2.Proactive platooning communication.Input: Input The SINR of predetermined threshold λ;The vehicle ID v l[i][j];Output:T<10ms;1: Compute platooning latency T;2: If「T⏋==10;3: output platooning size N;4: else while(T/10<1);5:N=N+1;6:return step 1;7:while(T/10>1);8:N=N-1;9:return step 1;
Algorithm 4 is the main function of proactive platooning,Algorithms 1,2,and 3 are subfunctions.When the intersection is congested,in the case of green light,the algorithm makes the vehicles at the intersection forming platoon to drive through the signalized intersection.
Among the four algorithms,platooning latency and inter-vehicle distance errorδiare important factors to ensure platooning formation for Algorithms 2 and 3.In the next section,we conduct the simulation experiment of proactive platooning,analyze the conditions of platooning formation and the traffic efficiency at a signalized intersection.
V.SIMULATION ANALYSIS OF PROACTIVE PLATOONING AT A SIGNALIZED INTERSECTION
The simulation uses MATLAB software.The whole process of vehicles joining the platooning,driving into the intersection,and leaving the intersection is simulated.The following contents are mainly analyzed.
5.1 Proactive Platooning Size and Latency
Based on the theoretical analysis in the first subsection of Section III,combined with the proactive platooning simulation results,we make the following explanation.In case 1),combined with Eq.(1b),(3),we can get the maximum distanced.However,the road is not always full of vehicles,so continue to analyze case 2)3).As the inter-vehicle distance decrease,the latency time and number of PMs gradually increase.And,when the distanced(t)increases between the first vehicle of PMs and PL,the platooning latency and the number of PMs decrease.
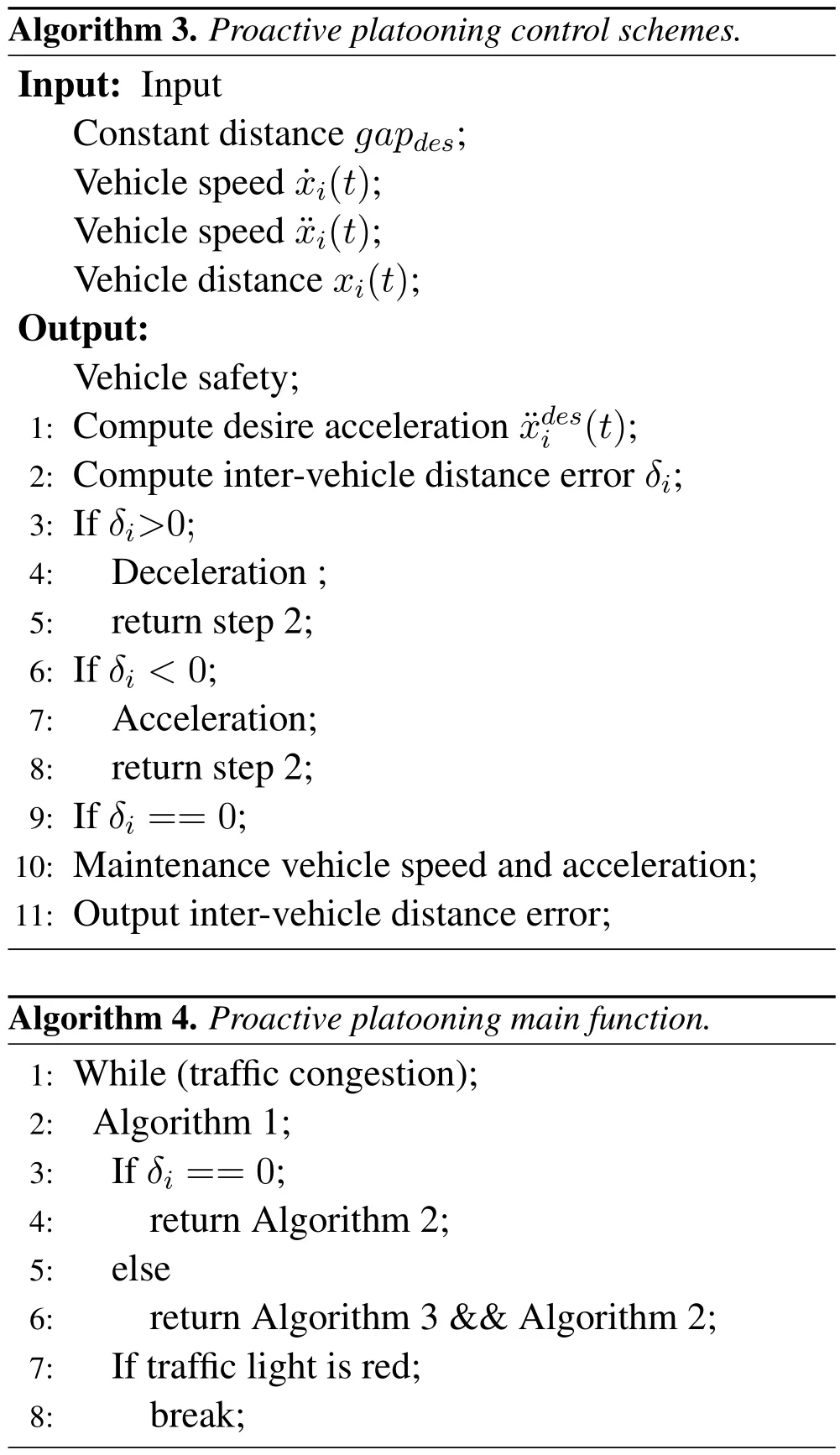
Algorithm 3.Proactive platooning control schemes.Input: Input Constant distance gapdes;Vehicle speed ˙xi(t);Vehicle speed ¨xi(t);Vehicle distance xi(t);Output:Vehicle safety;1: Compute desire acceleration ¨xdesi (t);2: Compute inter-vehicle distance error δi;3: If δi>0;4: Deceleration;5: return step 2;6: If δi <0;7: Acceleration;8: return step 2;9: If δi==0;10: Maintenance vehicle speed and acceleration;11: Output inter-vehicle distance error;Algorithm 4.Proactive platooning main function.1: While(traffic congestion);2: Algorithm 1;3: If δi==0;4:return Algorithm 2;5: else 6:return Algorithm 3&&Algorithm 2;7: If traffic light is red;8:break;
Figure 4(a) shows that whend(t) is greater than three meters,any inter-vehicle distance can satisfy the platooning latency.Figure 4(b)shows that in order to maximize the number of PMs,the inter-vehicle distance should be reduced as much as possible under proactive platooning.From Figure 4,it can be seen that the number of vehicles and platooning latency is sensitive tod(t),and the change of inter-vehicle distance is similar to a linear change.d(t)is the distance between the first vehicle of PMs and RSU,which is limited by the size of the intersection.For example,a multi-lane intersectiond(t)is much larger than a twolane intersectiond(t).However,the distanceSi −liis limited by the desired inter-vehicle distanceGin platooning control schemes.IfSi −liis less than the desired inter-vehicle distanceG,the vehicle needs to accelerate,otherwise,it decelerates.In general,we adjust the number of vehicles,d(t),andSi −lito meet the requirement of proactive platooning latency.
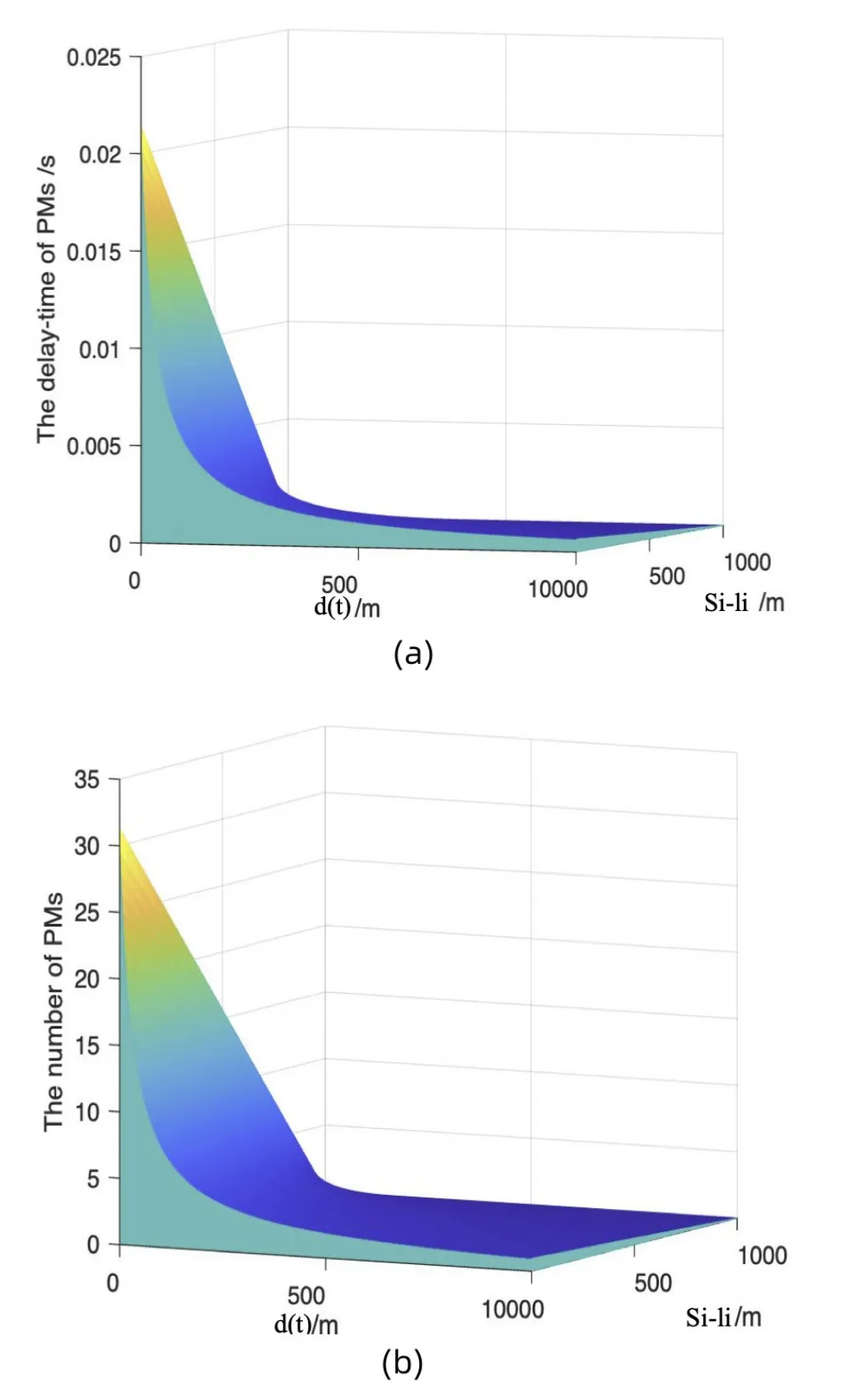
Figure 4.Proactive platooning analysis.(a)Proactive platooning latency.(b)Vehicle number of proactive platooning.
5.2 Proactive Platooning Stability and Safety
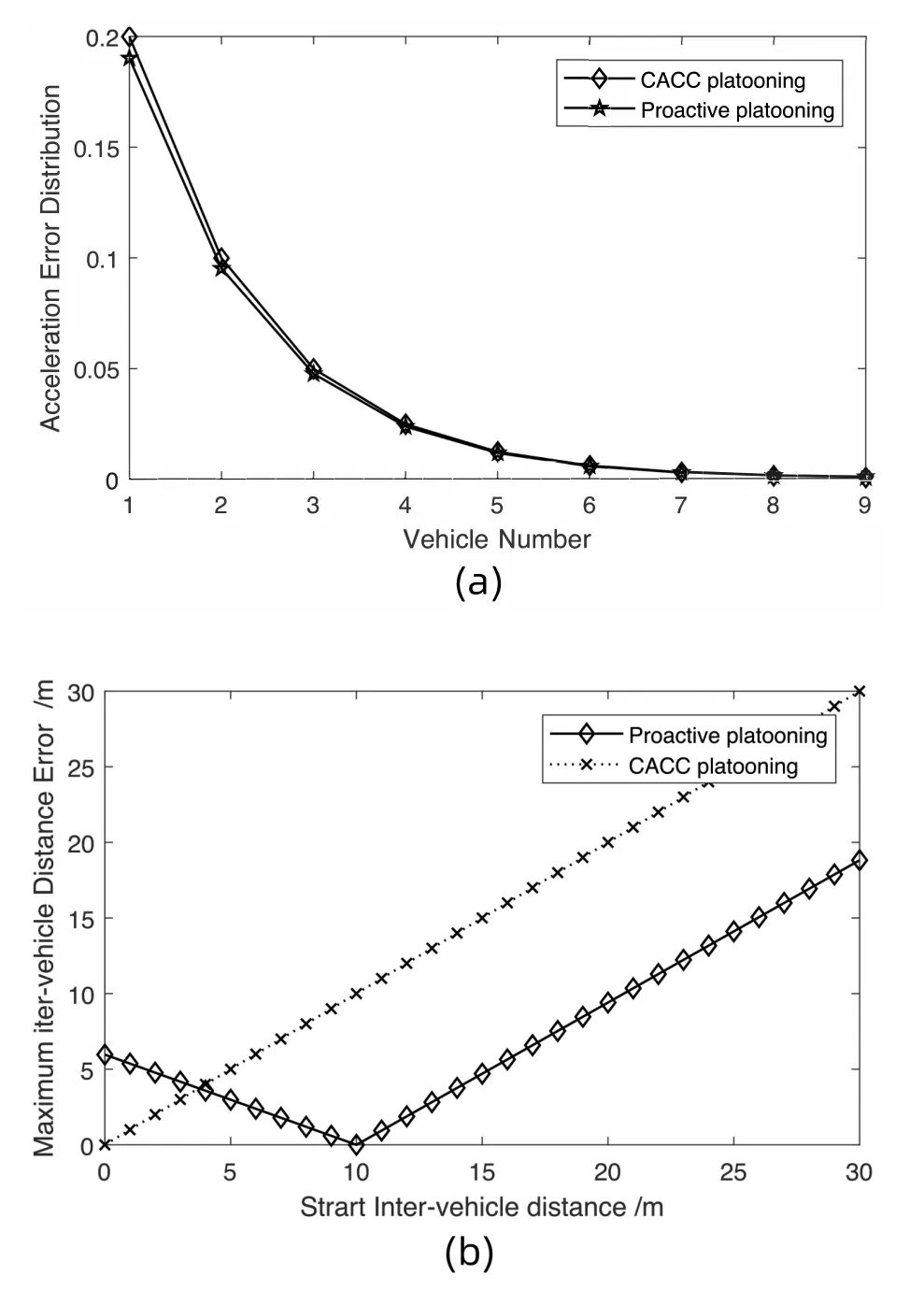
Figure 5.Stability and safety of proactive platooning at a signalized intersection.(a) Platooning stability under CACC and proactive platooning.(b)Platooning safety with different inter-vehicle distance.
In addition to the analysis of platooning latency,platooning stability and safety should also be discussed.For platooning stability,we use Eq.(7a) to compare the simulation results of a mature CACC platoon as shown in Figure 5(a).In the analysis of platooning safety,we use Eq.(7b).Eq.(7b)calculates the maximum inter-vehicle distance error in the process of platooning formation from start inter-vehicle distance to meeting the desired inter-vehicle distance.The start inter-vehicle distance is the inter-vehicle distance between the vehicle and the preceding vehicle when the vehicle starts platoon.In the simulation,we set the start inter-vehicle distance as the desired inter-vehicle distance when the platooning starts at every simulation,as shown in Figure 5(b).
In Figure 5(a),the acceleration error distribution of the proactive platooning is similar to the acceleration error distribution of the CACC(cooperative adaptive cruise control)platooning.This indicates that the stability of the proactive platooning is similar to the stability of the CACC platooning.For the constant distance platooning with the preceding-leader control strategy,CACC platooning is the most representative platooning scheme.We simulate the maximum intervehicle distance error of PMs under the proactive platooning and the CACC platooning,the results shown in Figure 5(b).In the range of 0-4m,the maximum inter-vehicle distance error of proactive platooning is higher than that of CACC platooning.The maximum inter-vehicle distance error of proactive platooning after 4m is smaller than CACC platooning.
In order to maintain platooning safety,we can obtain proactive platooning with a minimum constant distance of 4 m under proactive platooning.
5.3 Proactive Platooning Traffic Efficiency
The purpose of this paper is to relieve traffic congestion by proactive platooning at the already crowded intersections.We compared the throughput of humandriving and proactive platooning at an intersection in the one-way green light.
For proactive platooning,it is necessary to consider the maximum inter-vehicle distance error when the vehicle is safely passing through a signalized intersection.For human-driving,a person can only start the vehicle when the preceding vehicle is driving forward.Assume that at the signal intersection of the green time periodg,and the vehicle acceleration isα.The time when the vehicle accelerates to the maximum speedv0with the accelerationαist1.The time at which the vehicle passes a signalized intersection at the maximum speedv0ist2.The latency time for a person to perceive the movement of the preceding vehicle ists.The vehicle motion models are as follows.WhereSis the maximum distance inside of signalized intersection which always equalsMax(d(t)),andNis considered to be the largest number of vehicles passing through the intersection during the one-way green light.
supposeSα=v20/(2α),ifSα < S,v0=αt1elsev0=α(t1−ts).
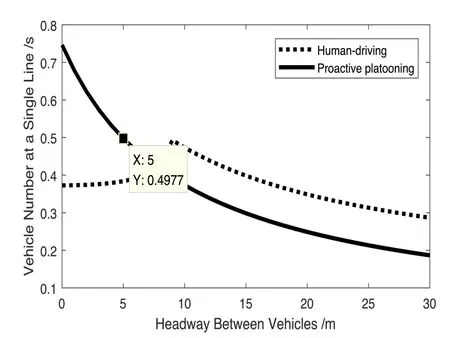
Figure 6.The throughput at a signalized intersection.
Whents≠ 0,the broken line in Figure 6 shows the throughput of the human-driving.Whents=0,the solid line in Figure 6 represents the throughput of the proactive platooning.When the humandriving passes the intersection,the maximum speed is 30km/h,and the inter-vehicle distance is 10m,the maximum throughput of the intersection can be reached.The simulation results of proactive platooning show that when the inter-vehicle distance is less than 5m,the throughput of proactive platooning is higher than the throughput of human-driving at a signalized intersection.
In general,the simulation experiment of proactive platooning is the simulation of platooning latency in communication,platooning safety in control,and platooning traffic efficiency in a signalized intersection.We adjust the inter-vehicle distanceSi −lito meet the platooning latency demand for platooning communication.Simultaneously,we adjust inter-vehicle distance errorδito realize the desired inter-vehicle distanceG.We use relative position coordinates in simulation,then(Si −li)−(Si−1−li−1)=δi.For traffic efficiency,excessive inter-vehicle distance will reduce the road capacity,otherwise increase the road capacity.In a word,proactive platooning designed by us reduces the inter-vehicle distance and increases the traffic efficiency as much as possible on the basis of meeting the platooning latency and platooning safety.
VI.CONCLUSION
Proactive platooning is an implementation of networked control platooning and computationcentralized platooning.Under proactive platooning,we analyze the relationship between the inter-vehicle distance and the transmission latency time of desired acceleration messages of PMs.Then we obtain the minimum safety inter-vehicle distance under proactive platooning.Finally,we conclude that proactive platooning traffic throughput exceeds the maximum throughput of human-driving when the inter-vehicle distance of proactive platooning is 4-5mat a signalized intersection.
In the future,we will study platooning cooperation for multiple intersections.At multiple intersections,traffic lights are still the key to regulating traffic flow.However,with the addition of autonomous vehicles,the traditional green wave cooperation can not solve the congestion caused by heterogeneous vehicles.Therefore,we will design green wave cooperation based on platooning to improve traffic efficiency at multiple intersections.
ACKNOWLEDGEMENT
This work was supported in part by China Scholarship Council,the National Natural Science Foundation Projects under Grant 61731004 and 61931005,and Beijing Natural Science foundation under Grant L202018.
- China Communications的其它文章
- Quality-Aware Massive Content Delivery in Digital Twin-Enabled Edge Networks
- Edge-Coordinated Energy-Efficient Video Analytics for Digital Twin in 6G
- Unpredictability of Digital Twin for Connected Vehicles
- Endogenous Security-Aware Resource Management for Digital Twin and 6G Edge Intelligence Integrated Smart Park
- Digital Twin-Assisted Knowledge Distillation Framework for Heterogeneous Federated Learning
- Design and Implementation of Secure and Reliable Information Interaction Architecture for Digital Twins