基于SSA的关节电机无模型自适应滑模控制*
2023-03-02 06:58何志琴吴钦木
组合机床与自动化加工技术 2023年2期
曹 勇,何志琴,吴钦木,邱 冰
(1.贵州大学电气工程学院,贵阳 550025;2.贵州省骨科医院,贵阳 550002)
0 引言
随着人工智能技术的飞速发展,外骨骼机器人已广泛应用于医疗康复领域,受到各国高度重视,并得到长足发展[1-2]。对外骨骼机器人而言其控制目标主要是能够对人体各种步态进行跟踪,而跟随各种步态离不开驱动电机对位置、转速、力矩等指令的控制。永磁同步电机(permanent magnet synchronous motor,PMSM)因其结构简单、体积小、效率高等优点,已被广泛应用于外骨骼机器人、航空航天等高性能领域[3]。但电机在运行过程中易产生参数摄动,同时在实际工况中负载扰动一般未知,会导致PMSM的控制性能下降,因此,在控制精度较高的外骨骼伺服控制系统中,必须设计高性能控制器对关节电机的不确定部分进行估计补偿,提升控制系统鲁棒性和动态性能。
无模型控制方法不依赖于被控系统的数学模型,且对于存在未知参数与复杂耦合关系的系统具有很好的鲁棒性[4]。滑模控制不受系统参数变化的影响,对系统扰动具有很强的鲁棒性,已被广泛应用于无模型控制系统中,随着对无模型相关理论的深入研究,无模型控制理论已在电机控制领域得到了很好的发展。赵凯辉等[5]提出一种转速环改进型无模型滑模控制方法,采用一种改进趋近律设计转速环无模型滑模反馈控制器;同时利用扩展滑模扰动观测器估计超局部模型中的未知部分,降低了对电机模型的依赖,提升了系统鲁棒性和抗干扰性能,但扰动观测器设计过程繁琐。姚文龙等[6]针对水井钻机电液伺服系统存在参数不确定以及未知负载扰动突变等非线性因素,提出了基于RBF 神经网络扰动观测器的无模型自适应控制方法,通过径向基神经网络扰动观测器对系统未知非线性项进行估计,设计时变参数估计律,提高了系统控制精度。付东学等[7]针对永磁直线同步电机位置跟踪易受参数变化、外部扰动等因素的影响,提出了自适应非奇异快速终端滑模控制方法,建立含不确定部分的电机动态模型,引入自适应律估计未知参数的上界,提高了系统的抗干扰性能,但将不确定部分参数分解为三项之和,分别设计各自自适应律进行估计,设计过程繁琐,计算量大。
因此,针对永磁同步电机驱动的外骨骼关节位置控制存在误差较大,易受参数摄动影响的问题,提出了基于SSA的无模型位置-转速环自适应终端滑模控制方法。该方法在电机位置-转速环新型超局部模型的基础上,引入自适应控制律对新型超局部模型中不确定部分进行估计;考虑传统滑模控制存在抖震大,控制效果不佳的问题,在趋近律等速项中引入变速因子使得系统状态可以根据距离滑模面的距离进行自适应调整,同时用 tanh(s)函数代替传统符号函数sign(s),引入终端滑模面有效减小了系统抖震;为避免参数的反复试凑,引入了麻雀搜索算法(sparrow search algorithm,SSA)进行参数寻优;最后,通过李雅普诺夫理论分析和仿真实验验证了该控制方法的有效性。
1 PMSM数学模型
外骨骼关节驱动系统主要由永磁同步电机、谐波减速器、编码器等部件组成[8]。假设电机在理想环境中运行,磁场正弦分布,忽略磁滞、磁饱和与涡流现象等,则永磁同步电机在两相旋转坐标系d-q轴下有[9-10]:
(1)
选择表贴式PMSM即Ld=Lq,电磁转矩方程:
(2)
式中,ud和id,uq和iq为d-q轴坐标系上的电压和电流;Ld和Lq为d-q轴上的电感;Rs为定子电阻;ψf为转子磁链;np为极对数;Te为电磁转矩;TL为负载转矩;J为转动量;B为摩擦系数;ωm为电机的机械角速度,其中ωm=ωe/np。
考虑参数发生摄动时PMSM机械运动方程:
(3)
式中,a=1.5npψf/J;b=B/J;c=TL/J;Δa、Δb、Δc为电机参数的摄动量。
用ρ表示系统不确定量的总和,即:
(4)
2 无模型滑模控制器的设计
2.1 位置环超局部模型
针对单输入单输出非线性控制系统,其无论数学模型多复杂都能用超局部模型表示为:
(5)
式中,y(v)为y的v阶导数;g(x)为系统未知量;α为常数。
基于新型超局部模型原理,将g(x)部分进一步分解[11]:
g(x)=βx+F
(6)
式中,β为常数;F为未知量。
此时式(5)超局部模型可进一步表示为:

(7)
结合式(3)将电机位置控制系统表示为新型超局部模型:
(8)
由式(8)建立控制系统无模型控制律:
(9)
式中,us为待设计的无模型滑模控制输入项。
2.2 滑模控制器的设计
基于PMSM数学模型选取系统状态变量:
(10)
式中,θ*为电机给定角度;θm为电机机械角度。
相较于传统滑模面,终端滑模面由于加入了非线性项使其具有更好的控制性能,因此设计终端滑模面:
(11)
式中,c1>0;c2>0;p/q>1/2且p、q均为数。
趋近律的优劣,直接影响控制器收敛速度,为改善滑模控制品质减小抖震,对传统指数趋近律进行改进,改进的趋近律如下:
(12)
式中,ε>0;0<δ<1;k>0;m>1且m≫δ。


(13)
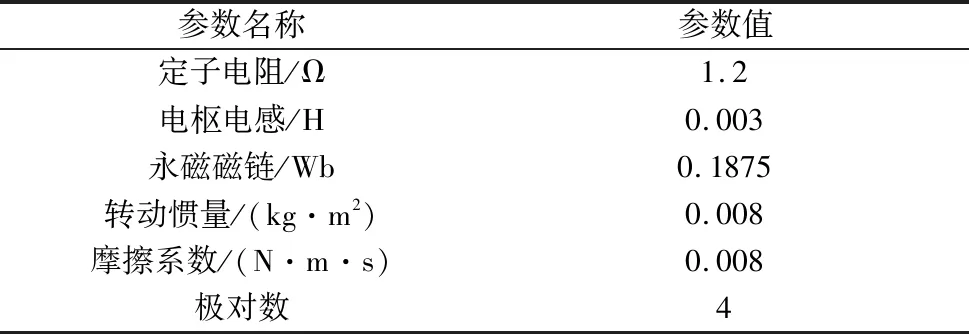
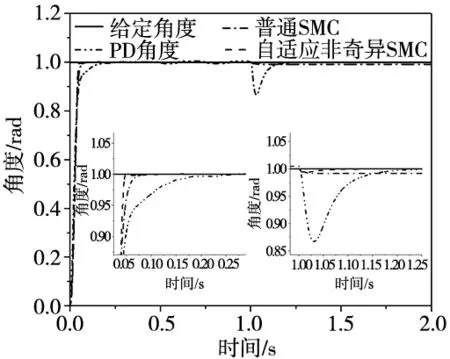
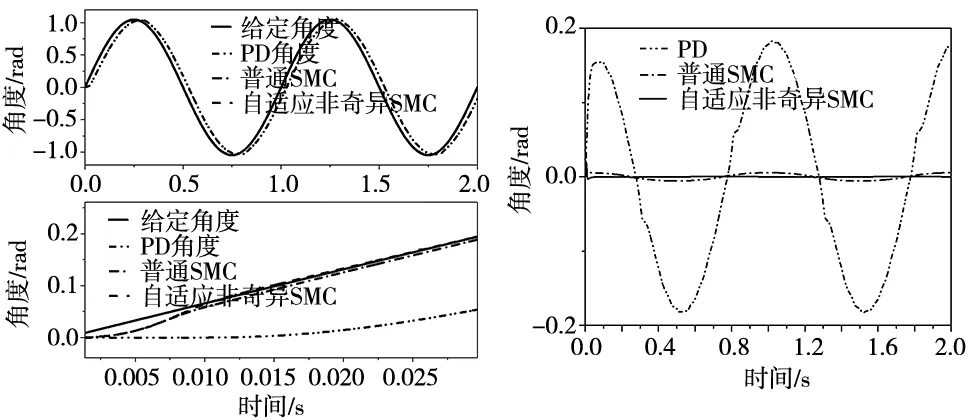
由于在趋近模态时本文所提趋近律由等速项和指数项同时作用所以所提趋近律趋近模态调节时间tr1 当进入滑动模态时,对于传统指数趋近律等速项时间计算为: (14) 求解新型趋近律滑动时间: (15) 解的新型趋近律滑动时间tr2为: (16) 当选择相同的ε即ε1=ε时可求得式(14)与式(16)的差: (17) 由于f(x)=arctan(x)/x在[0,+∞]内单调递减且恒小于1,0<δ<1,δ(1-e-1)<1所以可以通过选择较大的m确保t2-tr2>0即t2>tr2。同理当s<0时,所求结果一样。 综上所述,所设计新型趋近律调节时间tr=tr1+tr2小于传统指数趋近律调节时间t1=t1+t2,所设计的趋近律可以在更短时间内收敛。 对滑模面公式(11)进行求导并结合电机位置控制系统超局部模型式(8)有: (18) (19) 定义Lyapunov函数为: (20) 式中,γ为非0常数。 对其求导有: (21) 将式(18)、式(19)代入上式化解有: (22) (23) (24) 对比式(9)和式(19)可以求得无模型滑模控制输入为: (25) 进一步选择tanh函数代替传统sign函数减小抖震,其函数表达式为: (26) 将式(23)、式(25)和式(26)代入式(19)得到最终电机位置-转速新型无模型滑模控制律为: (27) 由于系统调节参数较多,且自适应律参数和滑模参数的选取会相互影响,增加调参困难,麻雀搜索算法(SSA)因其寻优能力强,收敛速度快,已被应用于许多智能调参领域,因此引入SSA对滑模部分参数和自适应律进行寻优。SSA核心思想是模仿麻雀的觅食和反捕食行为,进行局部和全局搜索,麻雀觅食过程即算法寻优过程[12]。SSA由发现者、加入者和侦察者3种麻雀组成。其发现者拥有较高适应度值,负责为加入者提供觅食区域和方向,加入者则一直追随发现者,同时不断监视发现者并争夺食物,以此保证捕食率,而侦察者发现捕食者后会立即发出报警信号,全体麻雀做出反捕食行为。 其发现者位置更新表达式为: (28) 式中,T为最大迭代次数;λ为[0,1]之间的随机数;0≤R≤1表示预警值;0.5≤ST≤1表示安全值;Q为服从正态分布的随机数;L为1*d并且元素全为1的矩阵。 加入者位置更新公式: (29) 式中,Xp(t+1)为当前最优位置;Xworst(t)为当前全局最差位置;A为1或-1随机组成的与麻雀个体同维度的列向量矩阵并满足A+=(AT(AAT)-1)。当i≤n/2时加入者追随发现者,当i>n/2时加入者处于饥饿状态,需进行觅食获得能量。 侦察者位置更新表达式: (30) 式中,Xbest(t)为当前全局最优位置;η为服从标准正态分布的随机数;K为[-1,1]随机数;fi为当前麻雀个体适应度值;fg和fw分别为全局最佳适应度值和全局最差适应度值;σ为较小常数避免分母为0;fi>fg表示麻雀处于种群边缘,极易受捕食者攻击;fi=fg表示种群中间的麻雀也受到了危险,此时需靠近其他麻雀以减少被捕食的风险。 算法具体执行步骤如下: 步骤1:对麻雀种群数量、迭代次数、捕食者和加入者比例等参数进行赋值; 步骤2:计算适应度值,确定最优及最差位置。其适应度函数选取如下: (31) 为防止系统超调过大加入ω2|e|,ω1,ω2为权值,其中ω1≪ω2。 步骤3:更新捕食者位置; 步骤4:更新加入者位置; 步骤5:更新警戒者位置; 步骤6:计算适应度,确定新的最优个体; 步骤7:判断是否满足约束条件,如满足则结束寻优,输出最优参数;如不满足,则重复执行步骤2~步骤6继续寻优。 本文以PMSM驱动的下肢外骨骼关节电机为研究对象,通过坐标变换进行解耦控制,在电机位置新型超局部模型的基础上,引入自适应控制律估计新型超局部模型的不确定部分,整体控制结构如图1关节电机控制结构图。 图1 关节电机控制结构图 在MATLAB2020b/Simulink 环境中搭建PMSM驱动的关节电机仿真模型,采样时间设置为10 μs,母线电压设置为36 V,其它电机参数具体如表1所示。 表1 永磁同步电机具体参数 考虑实际工况中电机参数摄动和负载扰动一般未知,为验证所提方法的有效性,分别采用PD控制、传统滑模控制与本文所提无模型自适应终端滑模控制3种方法对外骨骼关节电机伺服系统进行实验研究。其本文所提无模型自适应终端滑模控制中的c1,c2,ε,k,δ,m,γ通过麻雀搜索算法进行在线寻优,再进行微调,最终参数选择为:c1=33.2,c2=5.8,ε=0.001,k=922,δ=0.2,m=50,γ=125 878,p=17,q=9。 实验一阶跃信号常值负载抗扰实验。为验证本文所设计的控制器的抗干扰能力,进行常值负载抗扰实验,在1 s时刻突加10 N·m负载,仿真结果如图2所示。 图2 角度对比曲线 由图2在保证3种控制方法均无超调的情况下,采用传统PD位置控制调节时间很大,达到了0.12 s(Δ±2%);采用传统滑模控制其调节时间较小,只有0.056 s;而采用本文所提自适应终端滑模控制调节时间最小只有0.045 s。当加入负载扰动时,由局部放大图可知采用传统PD控制能回到初始位置,但最大位置误差较大达到了0.134 rad,同时收敛时间较慢达到了0.382 s;采用传统滑模控制最大位置误差相对较小只有0.008 4 rad,但位置跟踪误差并不能收敛到零,相反位置跟踪误差会一直维持在0.008 4 rad不变,导致系统鲁棒性变差;而采用本文所提控制方法最大位置误差很小只有0.006 rad,且收敛时间只需0.167 s。综合来看,相较于PD控制和传统滑模控制方法本文新型无模型自适应终端滑模位置控制调节时间分别提高了62.5%和20%,加负载时位置波动分别缩小了95.5%和28%。 实验二变负载正弦信号跟踪实验。由于人体在穿戴外骨骼行走过程中步态和负载变化均接近正弦波,因此选取r=π/3sin(2πt)作为系统轨迹跟踪曲线,y=10sin(2πt)作为负载变化曲线进行正弦负载扰动实验。实验结果如图3和图4所示,其图3为局部放大图。 图3 加负载正弦角度曲线 图4 正弦角度误差曲线图 从图3上图加负载正弦角度跟踪曲线可知3种控制方法在添加正弦扰动情况下都能够有效跟踪正弦曲线,但采用传统PD位置控制滞后明显;从图3下图局部放大图可以看出电机启动瞬间采用传统滑模和自适应终端滑模控制相较于传统PD控制,响应速度更快,0.01 s左右便趋于稳定;图4正弦角度误差曲线图可知采用PD控制最大误差达到了0.183 rad,而采用传统滑模和本文自适应非奇异滑模控制误差相对较小,但本文所提方法误差更小,误差曲线趋于平缓抖震更小。 综合上面的仿真对比分析可以得出,本文设计的新型无模型自适应终端滑模位置控制器比传统滑模控制和PD位置控制动态响应特性更好,控制精度更高,鲁棒性更强,可以提高外骨骼伺服控制系统的位置跟踪精度和抗干扰能力。 为解决下肢外骨骼关节电机位置控制易受参数摄动影响,跟踪精度要求高的问题,基于新型超局部模型对电机位置控制系统进行了建模,通过选取终端滑模面,改进指数趋近律,提高了系统收敛时间,减小了抖震;其次,引入自适应律对系统未知量进行估计,并通过麻雀搜索算法对系统滑模部分参数和自适应律参数进行了寻优,避免了参数的反复试凑,加强了系统鲁棒性。最后,通过仿真实验得出了所设计的基于SSA自适应无模型终端滑模位置控制具有位置跟踪误差小、响应速度快、抖震小、鲁棒性强的优点。该控制策略能够满足外骨骼位置伺服系统的工作要求。
2.3 稳定性证明


3 麻雀算法
4 仿真结果分析

5 结束语
猜你喜欢
小哥白尼(野生动物)(2021年12期)2021-03-29
高师理科学刊(2020年2期)2020-11-26
农业机械学报(2020年2期)2020-03-09
中华建设(2019年7期)2019-08-27
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
项目管理技术(2016年12期)2016-06-15
西南交通大学学报(2016年6期)2016-05-04
工业设计(2016年6期)2016-04-17