航检影像智能分析与缺陷识别系统设计
2023-02-28 09:12陈晓东通信作者陈泽霖王夏婷
数字通信世界 2023年1期
陈晓东,赵 欢 通信作者,陈泽霖,康 捷,王夏婷
(内蒙古达智能源科技有限公司,内蒙古 呼和浩特 010000)
1 系统设计综述
1.1 总体设计思路
中国长距离高压输电线路网络巨大,基层巡检作业负担很重,运维成本很高。目前,对高压输电线路航检影像的自动化智能化分析检测技术的需求越来越迫切,如何对高压输电线路航检影像中关键部件视觉缺陷进行准确快速的检测仍是亟待解决的关键问题之一[1]。此外,人工智能的图像识别技术近年来在各个领域的研究成果越来越多,而在高压输电线路航检影像的缺陷分析处理方面却显现出较多局限性,拥有完整数据分析处理流程的系统少之又少[2]。基于以上问题,本文中设计开发的航检影像智能分析与缺陷识别系统主要包含航检影像的智能剪辑分析管理和缺陷识别两大功能。智能剪辑是本系统正常运行的基础条件,缺陷识别则是本系统的核心内容。
系统主要数据源共有3大类(视频、图像、文字),包括超高压输电线路的直升机航检视频、无人机巡检图片、杆塔台账、线路台账和检修信息等。系统将数据源分为原态数据和AI态缺陷数据,两类数据源均通过数据入口导入。其中不再做数据分析加工的数据(如杆塔台账、线路台账)被称为原态数据;需要进行AI缺陷识别(如航检视频和无人机图像)的数据被称为AI态缺陷数据。系统在缺陷识别结束并审核通过后,将原态数据和AI态数据进行智能融合,将重复或缺失的缺陷图片和缺陷信息表依照原态与AI态按不同权重合并,得到完整的缺陷图片和表格信息。最后,通过批量上传接口,系统自动将整合后的检修信息、处理后的视频、图片以及原态数据一起上传到后台分析和储存服务器,实现层级报表统计、杆塔线路预警、GIS(Geographic Information Science)地图展示、统计信息的图示化等。
1.2 总体架构
根据系统总体设计思路,将数据载体划分为数据源、处理服务器、并行识别服务器、后台管理服务器,如图1所示。首先,将超高压输电线路的原态数据通过数据入口录入到系统数据缓存区暂存,对原始线路视频进行智能化分析。智能化分析包括视频切分、关键帧推送、智能编目。视频切分是将一个大的航检视频按照杆塔顺序进行剪辑;关键帧推送是对每个杆塔关键部位进行精准分析,推送与主要部件相关的关键帧图像;智能编目是将得到的杆塔小视频与关键帧图,按照线路、杆塔、视频、标准挂点等进行分类整理,为航检资料储存管理和系统后续分析做准备。
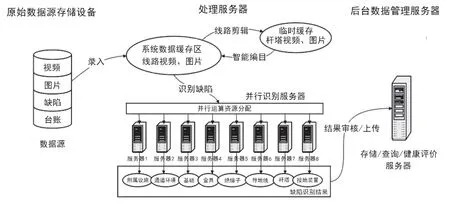
图1 系统总体架构示意图
其次,进行缺陷识别,提取编目后的视频和图片,结合分布式硬件服务器实时状态进行资源分析与分配。在缺陷识别系统中,采用多种识别算法与多重识别机制相结合,并引入缺陷识别结果审核的闭环处理方式,将未通过审核的识别结果添加到缺陷训练知识库,审核通过的识别结果则与原始人工分析的缺陷结果进行融合并上传到后台数据管理服务器。识别结果审核机制将辅助缺陷识别系统对识别结果进行修正和核验,从而提高缺陷识别的准确率。
最后,通过后台数据管理服务器实现数据储存、查询、健康分析评价与预警。按照管局、线路、杆塔的数据架构,深度挖掘和展示航检分析数据,并结合杆塔检修状态等数据进行健康评价和预警。
2 航检影像智能分析系统
由于高压输电线路巡检线路众多。巡检视频影像数量较多,巡检视频影像大多是以线路为单位的视频,而在进行缺陷分析和储存管理时,则需要细分到杆塔和挂点[3],因此需要对线路视频进行准确分割整理,并推送关键帧和关键挂点等内容。航检影像智能分析系统设计时主要包含航检影像智能分析剪辑和智能编目整理两部分。
在智能分析剪辑中,系统读取航检杆塔视频文件,通过OCR(Optical Character Recognition)技术获得视频画面中的杆塔号、FOV(Field of View,视角场)、节拍等信息[4],再结合画面内容对某条线路的长视频进行切分剪辑,得到该线路对应的一个个杆塔视频。同时,系统对视频画面内容和质量进行智能化分析,将清晰的杆塔关键部位进行推送、整理,得到关键帧,并在帧的头部数据中做出标记用以区分人工筛选的关键帧,从而为后续标准挂点等关键帧、关键部位的分析做准备。
剪辑完成后,进行编目操作。智能编目主要是对航检影像资料进行规范化、信息化管理,重点是规范航检影像资料管理规则,结合高压输电线路运行单位的实际需求进行深入分析、研判和规划,既要保证影像资料的完整性,又要满足在运行过程中查询管理的科学性和便捷性。因此,航检影像智能分析系统采用管局、年度、线路、杆塔、标准挂点/视频/缺陷信息的层级化储存方式进行分级储存管理。
3 缺陷识别系统
3.1 设计思路
缺陷识别系统需要对编目后的各条线路、杆塔中的视频和图片进行缺陷识别,筛选出包含缺陷的图片并标记,为后续的故障检修排查提供依据。缺陷识别系统主要针对超高压输电线路中杆塔的通道环境、附属设施、基础、金具、绝缘子、导地线、杆塔、接地装置,共计8个大类中的11个关键部位进行缺陷分析识别,从最高频的缺陷发生部位入手,快速高效地检测超高压输电线路中的安全隐患。
由于不同杆塔部件其形状、大小、边界清晰度、亮度等特征各异,在航拍时摄像机的聚焦、视角场、拍摄距离和角度也不一样,因此采用多种识别算法应对不同类别的杆塔关键部位。如采用Yolo算法分析识别图形边界清晰且形状基本固定的目标(如防震锤滑移、绝缘子自爆、鸟窝等),采用语义分割算法分析识别形状不固定的目标(如通道交叉跨越公路铁路、防震锤锈蚀等),采用超分辨技术辅助进行图像清晰化处理后再进行识别的目标[5](如防震锤、绝缘子等单体较小且清晰度不高但影响整体结论的目标)。针对同一关键部位还会采用多种识别算法组合叠加进行多重识别,如图2所示。
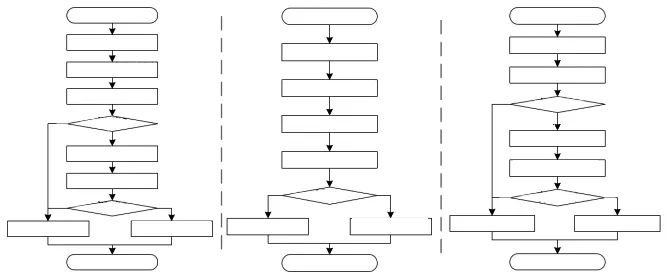
图2 不同识别内容的识别算法流程图
3.2 识别模型与结果对比
系统通过对航检关键部位图片的大量学习训练,显示了6类缺陷识别准确率(见表1)。其中,线夹歪斜、绝缘子自爆、塔牌缺失的识别准确率约为92%;防震锤滑移的识别率约为81%;鸟窝和防震锤锈蚀模型识别准确率较高,分别为97%和97.3%。
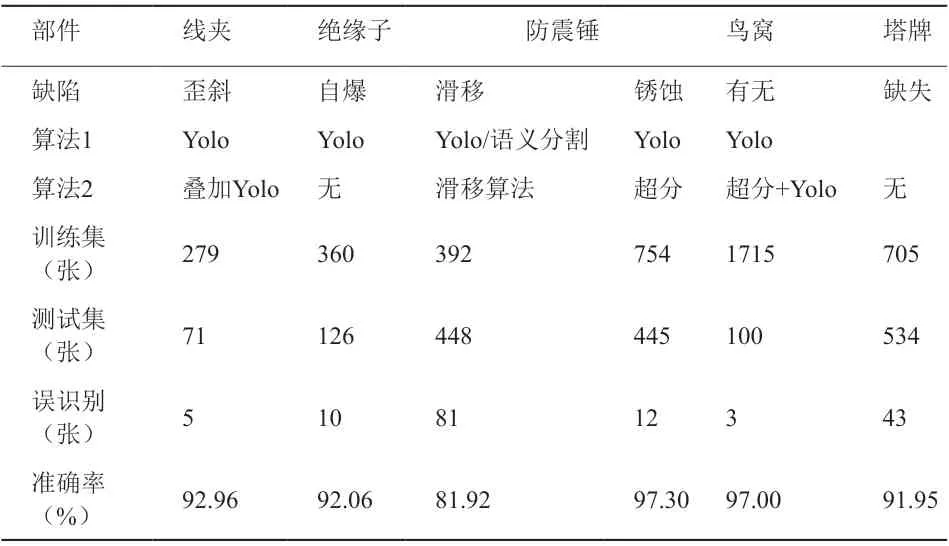
表1 缺陷识别准确率
4 结束语
本文中设计的航检影像智能分析与缺陷识别系统,结合分布式硬件服务器实时状态进行资源分析和分配,视频切分采用多线程并行剪辑分割技术,以人工智能深度神经网络为核心,以Yolo、语义分割和超分辨算法为基础,构建具有针对性的组合叠加识别算法系统,通过对高压输电线路航检影像深度挖掘分析和关键部位的缺陷识别分析,实现高压输电线路航检影像分析与缺陷快速识别检测,实现高压输电线路影像资料管理的规范化、自动化、智能化。系统运行稳定且分析速度与传统人工分析方式相比有较大提升,可使高压输电线路安全隐患被快速发现和整改。■
猜你喜欢
卫星应用(2022年1期)2022-03-09
重庆科技学院学报(自然科学版)(2022年6期)2022-02-04
ELLE世界时装之苑(2021年10期)2021-10-11
微型电脑应用(2020年12期)2020-12-25
中国特种设备安全(2019年8期)2019-10-14
中华建设(2019年3期)2019-07-24
电子制作(2019年11期)2019-07-04
大连理工大学学报(2017年4期)2017-08-07
大陆桥视野·下(2016年11期)2017-02-28
电测与仪表(2016年23期)2016-04-12