自适应无监督聚类算法的运动图像关键帧跟踪
2020-12-25 03:16杨彩霖
微型电脑应用 2020年12期
杨彩霖
(西安广播电视大学 理工教学部, 陕西 西安 710002)
0 引言
伴随图像、图形处理技术、计算机视觉技术的不断发展,会产生大量运动视频数据,对这些运动视频数据进行充分利用,具有十分重要的实际应用价值,如:目标检测、运动图像关键帧跟踪等[1-2]。运动图像关键帧跟踪可以帮助人们对运动轨迹进行描述,可以对运动目标行为进行理解,因此运动图像关键帧跟踪成为当前计算机视觉研究领域的一个热点问题[3-5]。
针对运动图像关键帧跟踪问题,人们投入了大量的时间进行了深入、广泛的研究,当前存在许多运动图像关键帧跟踪方法[6]。当前运动图像关键帧跟踪技术可以划分为两类,一类基于硬件的运动图像关键帧跟踪方法,如基于嵌入系统,该类方法的运动图像关键帧不但跟踪速度快,而且精度比较高,但是运动图像关键帧跟踪成本高,且通用性差,因此实际应用价值不高[7-9];另一类基于软件的运动图像关键帧跟踪技术,主要有:语义模型的运动图像关键帧跟踪方法,高斯混合模型的运动图像关键帧跟踪方法,该类方法的运动图像关键帧跟踪成本低,对环境要求高,通用性好,成为当前运动图像关键帧跟踪的主要研究方向[10-12]。在实际应用中,这些运动图像关键帧跟踪的方法还存在各种不足,主要体现在运动图像关键帧跟踪的错误率高、运动图像关键帧跟踪速度慢,无法对运动图像关键帧进行在线、实时跟踪。
针对当前运动图像关键帧跟踪中存在的问题,以获得更加理想的运动图像关键帧跟踪结果为目标,提出了一种基于自适应无监督聚类算法的运动图像关键帧跟踪方法,采用聚类算法根据特征对运动图像关键帧进行分类,采用自适应无监督学习算法对运动图像关键帧进行跟踪,仿真对比结果表明,本文方法获得了理想的运动图像关键帧跟踪效果,运动图像关键帧跟踪误差要远远小于其它运动图像关键帧跟踪方法,改善了运动图像关键帧跟踪效率,对比结果验证了自适应无监督聚类算法的运动图像关键帧跟踪有效性和优越性。
1 自适应无监督聚类算法的运动图像关键帧跟踪方法
1.1 运动视频采集以及分帧处理
运动视频图像采集是自适应无监督聚类算法的运动图像关键帧跟踪的第一步,本文采用高清数字机芯作为视频信号源,然后采用视频信号处理模块对运动视频图像进行采集和存储,最后将运动视频图像输出到终端。由于运动视频由许多帧图像组成,使得运动视频图像之间有大量的信息冗余,因此本文通过对运动视频图像进行分帧处理,提取运动图像关键帧,将其它运动图像帧去除,以加快运动图像关键帧跟踪速度。
1.2 提取运动图像关键帧的特征向量
1.2.1 运动图像关键帧的矢量场特征
对于一个运动图像关键帧,将其划为多个子块,如图1所示。

图1 运动图像关键帧的分块
设第C个子块的运动图像关键帧强度为ρ,其x和y方向的分量分别为Cx和Cy,θ表示运动图像关键帧矢量的方向,如式(1)。
(1)
运动视频图像的关键帧根据时间前后进行排列,那么可以得到直方图计算公式,如式(2)。
(2)
对x和y方向上的期望和方差进行评估,如式(3)。
(3)
1.2.2 提取运动图像关键帧的颜色特征
pij表示运动图像关键帧中第j个像素、第i个颜色分量,那么颜色分量1~3阶矩阵重计算公式,如式(4)—式(6)。
(4)
(5)
(6)
1.3 运动图像关键帧的聚类分析算法
模糊C均值聚类分析算法通过隶属度划分每个数据点的归属类型,共有c类,第i类的聚类中心为ci,uij表示第i个数据点(xi)属于第j类的隶属度值,U表示隶属度矩阵,所有数据的隶属度的和应该为1,如式(7)。
(7)
模糊C均值聚类分析算法标函数,如式(8)。
(8)
式中,dij表示ci与xj间的距离;m表示模糊加权指数。
引入拉格朗日乘子λi,i=1,2,…,n,建立新的目标函数,如式(9)。
J(U,c1,…,cc,λ1,…,λn)=
(9)
对聚类中心和隶属度值进行求解,如式(10)、式(11)。
(10)
(11)
模糊C均值聚类分析算法根据运动图像关键帧特征,对分帧后的运动图像进行分析,将运动图像关键帧划分为不同类别,便于对后续的运动图像关键帧跟踪操作,如图2所示。
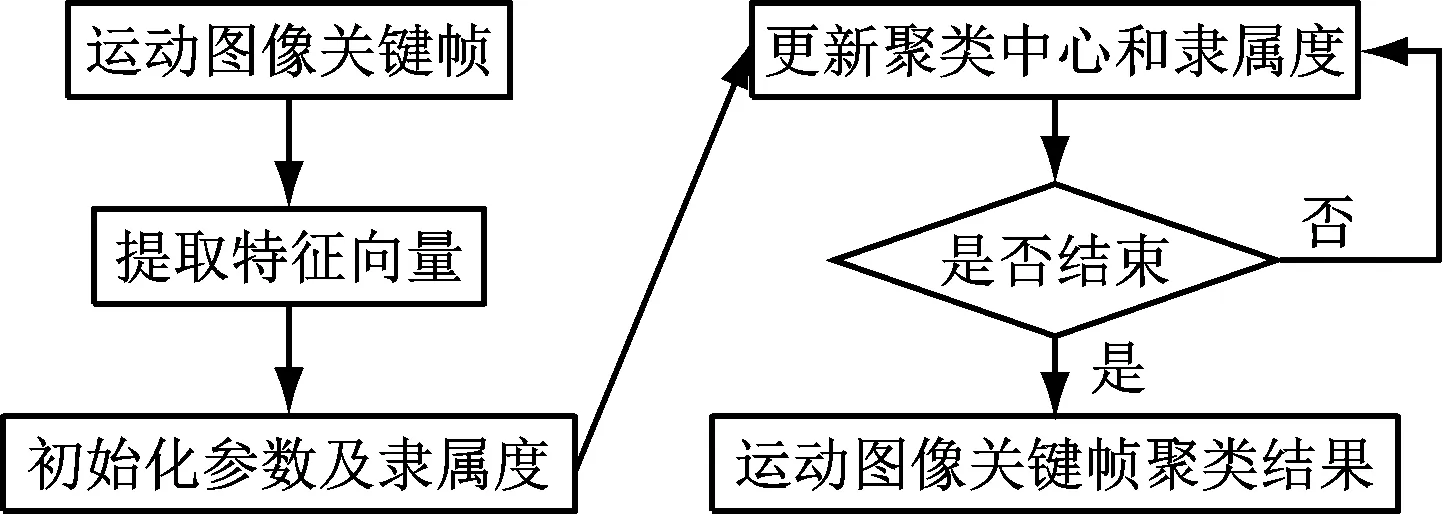
图2 运动图像关键帧的聚类分析流程
1.4 自适应无监督算法的运动图像关键帧跟踪
RBF神经网络是一种自适应无监督算法,其具有良好的拟合能力,因此本文选择其对运动图像关键帧跟踪进行建模研究。RBF网络结构,如图3所示。

图3 RBF神经网络的结构
输入向量即为运动图像关键帧特征向量集合:x=(x1,x2,…,xn);y=(y1,y2, …,yp)为运动图像关键帧变化值;RBF神经网络采用高斯函数拟合运动图像关键帧变化轨迹,高斯函数定义,如式(12)。
(12)
RBF神经网络的输出值,如式(13)。
(13)
RBF神经网络根据运动图像关键帧特征向量集合对运动图像关键帧变化特点进行分析,得到运动图像关键帧变化值,从而根据运动图像关键帧值实现运动图像关键帧的跟踪。
2 仿真实验
2.1 实验环境
为了测试自适应无监督聚类算法的运动图像关键帧跟踪性能,对其进行仿真测试实验,仿真测试的实验环境,如表1所示。

表1 运动图像关键帧跟踪的实验环境
2.2 实验对象
为了使自适应无监督聚类算法的运动图像关键帧跟踪结果更具说服力,选择5类运动图像作为实验对象,每一类运动图像的数量,如表2所示。
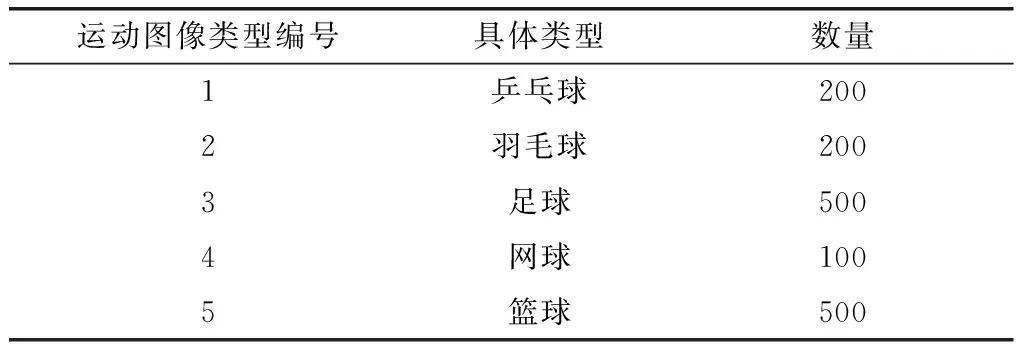
表2 运动图像关键帧跟踪的实验对象
2.3 运动图像关键帧跟踪精度对比
为了使自适应无监督聚类算法的运动图像关键帧跟踪结果具有可比性,选择语义模型的运动图像关键帧跟踪方法,高斯混合模型的运动图像关键帧跟踪方法进行比实验,统计它们对5类运动图像关键帧的跟踪精度,如图4所示。

图4 不同方法的运动图像关键帧跟踪精度对比
对图4的运动图像关键帧跟踪精度进行对比分析可以发现,自适应无监督聚类算法的运动图像关键帧跟踪精度最高,其次为高斯混合模型的运动图像关键帧跟踪方法,运动图像关键帧跟踪精度最低者为语义模型,对比结果证明了自适应无监督聚类算法可以对运动图像关键帧进行准确跟踪,获得了理想的运动图像关键帧跟踪结果。
2.4 运动图像关键帧跟踪精度对比
统计3种方法对5类运动图像关键帧跟踪时间,如图5所示。

图5 不同方法的运动图像关键帧跟踪时间对比
对图5的运动图像关键帧跟踪时间进行对比分析可知,自适应无监督聚类算法的运动图像关键帧跟踪时间要少于高斯混合模型和语义模型,对比结果证明了自适应无监督聚类算法加快了运动图像关键帧跟踪速度,可以对运动图像关键帧进行实时跟踪,具有更高的实际应用值。
3 总结
针对当前运动图像关键帧跟踪方法存在的不足,以提高运动图像关键帧跟踪精度为目标,提出自适应无监督聚类算法的运动图像关键帧跟踪方法,并与其它运动图像关键帧跟踪方法进行了对比测试,结果表明,本文方法的运动图像关键帧跟踪精度明显高于对比方法,且运动图像关键帧跟踪速度更快,具有十分广泛的应用前景。
猜你喜欢
现代计算机(2022年4期)2022-04-24
一重技术(2021年5期)2022-01-18
扬州大学学报(自然科学版)(2019年2期)2019-08-12
导航定位与授时(2019年3期)2019-05-16
软件导刊(2018年11期)2018-11-19
现代计算机(2018年27期)2018-10-25
电子制作(2018年11期)2018-08-04
软件导刊(2018年4期)2018-05-15
舰船电子对抗(2017年6期)2018-01-11
互联网天地(2016年1期)2016-05-04