
U轴机构设计与参数计算研究
2023-02-24 01:03赵会波李汉伟于国栋杨秀丽
制造技术与机床 2023年2期
赵会波 李汉伟 于国栋 杨秀丽
(烟台台海玛努尔核电设备有限公司,山东 烟台 264000)
对于大/重型或细长轴类零件上的等径或变径回转特征轮廓,因为重量、形状和尺寸等因素限制,一般采用工件固定-刀具回转的方式加工,例如:镗铣床配数控平旋盘加工重型工件上的柱面、锥面和内外环槽等;(便携式)数控坡口机镗车管道端面坡口;平旋盘式数控管螺纹车床套车细长管件两端的台阶面、圆柱管螺纹和圆锥管螺纹等;镗孔车端面专用机床镗车工件端面和内孔;在坐标磨床上采用行星磨削的方式磨削圆锥和圆柱轮廓等。以上加工方式的共同特征是在旋转主轴上附加有可径向运动的进给轴,GB/T 19660定义此轴为U轴。
目前实现U轴功能的机构主要有斜面齿纹(块)式、齿轮齿条式和行星差动式等。斜面齿纹(块)式[1]的U轴精度高,行程小,主要用于中小尺寸变径轮廓的加工,特别是小直径变径深孔的加工;齿轮齿条式[2]的U轴两级传动机构均为齿轮齿条,定位精度相对较低,精度保持时间短,该方案目前逐渐被淘汰;2K-H(A)型(NGW型[3])行星差动方案的U轴精度较好,差动机构简单,传动效率高,但齿轮机构的传动链长,整体结构复杂,该方案主要用于中大尺寸变径轮廓的加工;2K-H(D)型(WW型[4])行星差动方案的U轴精度高,传动链短,结构简单,是目前中大尺寸变径轮廓加工最主流的方案,但也存在差动机构传动效率较低、制造安装不便的问题。另外,从使用要求上来看,斜面齿纹(块)式和齿轮齿条式的U轴机构是通过Z轴-U轴转换实现U轴功能,必须配合主轴可伸缩(双层主轴)的镗铣床或带推杆机构的专用机床使用,而行星差动式的U轴机构一般自带U轴控制电机,可以作为独立的数控平旋盘配合通用机床(单层或双层主轴皆可)或专用机床(无需推杆机构)使用,也可以设计成与机床一体化使用。
为了解决上述方案的存在的问题以及避开现有技术专利的限制,本文提出了一种用于加工中大尺寸变径轮廓的新型U轴方案,其核心传动机构是一个2K-H(C)型行星差动轮系,这种差动轮系能够实现精密传动,且传动效率高、传动链短和结构简单,已经在滚齿机、蜗轮母机等机床的传动系统设计中得到了广泛应用。下面以平旋盘为例对此方案的U轴结构和传动比进行分析。
1 结构分析
如图1所示,平旋盘的机械部分主要包括固定支座、齿轮变速机构和主轴部件;主轴部件包括:主轴、固定在主轴上的同步齿轮10、空套在主轴上的双联齿轮100(100A,100B)和固定在主轴端部的旋转盘体组件;旋转盘体组件包括:旋转盘体X、丝杠齿轮110及滚珠丝杠、丝杠螺母和滑板等;同步齿轮10和空套齿轮100A之间布置了由2K-H(C)型行星差动机构和惰轮90(图1中偏置表示)串联而成的齿轮变速机构,偏置安装在主轴一侧;行星差动机构的行星架60由蜗轮蜗杆副70驱动。图1中的2K-H(C)型行星差动机构可以实现两种传动比[5]:当行星架60固定,中心轮30旋转时,i30-50=i20-80=-1;当行星架60旋转,中心轮30固定时,i60-50=i60-80=1:2。
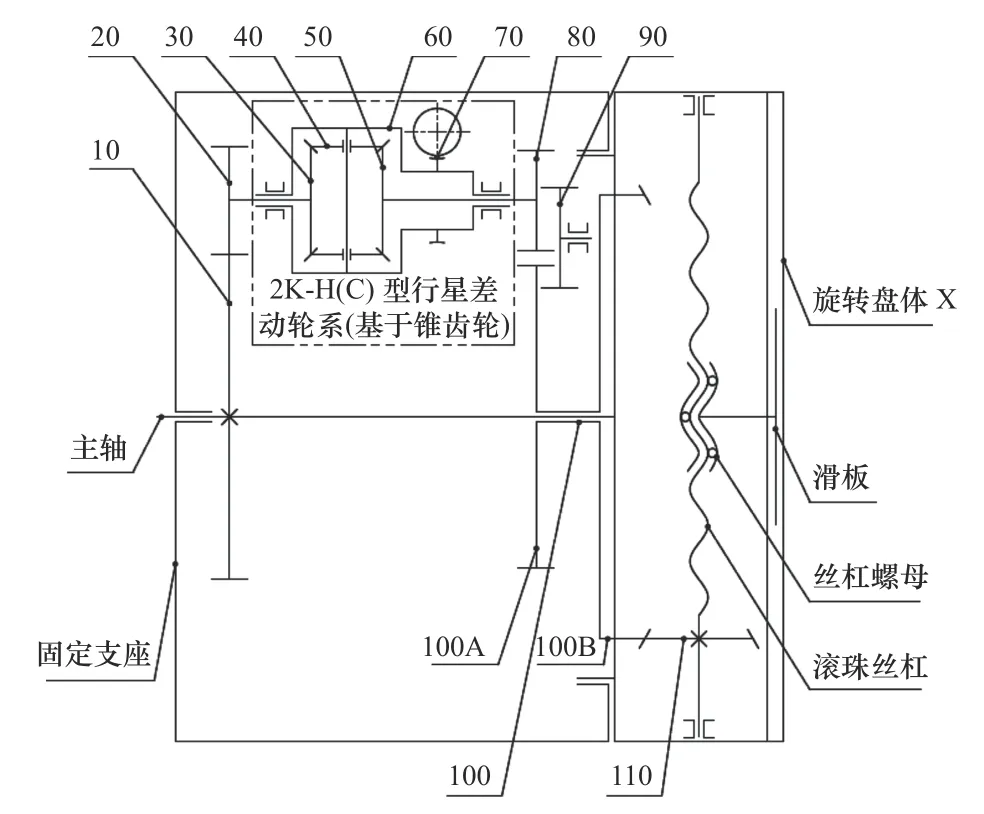
图1 平旋盘机构简图(基于锥齿轮)
平旋盘的齿轮传动机构按功能可以分为2部分:
第1部分:同步齿轮10至空套齿轮100A。其中齿轮20至齿轮90构成的齿轮变速机构可以使同步齿轮10(主轴、旋转盘体X)和空套齿轮100A(100B)实现1∶1传动和非1∶1传动两种工况。
第2部分:空套齿轮100B、丝杠齿轮110和旋转盘体X构成的末级行星传动机构。其中空套齿轮100B(中心轮)和旋转盘体X(行星架)两个基本构件作为主动件,丝杠齿轮110(行星轮)作为从动件。当空套齿轮100B和旋转盘体X同步旋转即传动比等于1∶1时,丝杠齿轮110不产生自转仅有公转,滑板静止。当空套齿轮100B和旋转盘体X存在转速差即传动比不等于1∶1时,丝杠齿轮110产生自转,滑板径向运动。
2K-H(C)型行星差动机构的输出轴齿轮80和空套齿轮100A之间布置有惰轮90,如图2所示。

图2 惰轮布置图
2 传动比分析
2.1 工况1
当主轴(同步齿轮10、旋转盘体X)旋转,2KH(C)型行星差动机构的行星架60固定,即ω10≠0,ω60=0时,输入运动来自主轴,同步齿轮10至空套齿轮100A是一个定轴轮系,其传动比计算如下:
故主轴、同步齿轮10、旋转盘体X、空套齿轮100(100A、100B)同步旋转,有ω10=ω100A=ω100B=ωX。
在末级行星传动机构中,采用解析法[6]计算丝杠齿轮110(行星轮)相对于旋转盘体X(行星架)的旋转(自转)速度。
此工况下,主轴、同步齿轮10、空套齿轮100、旋转盘体X同步旋转,丝杠齿轮110不发生自转,可以认为来自主轴的运动使旋转盘体X上的滑板保持静止。此时,平旋盘相当于定径刀具,配合机床相关进给轴可以完成圆柱面、圆柱螺纹等轮廓的加工。
2.2 工况2
当主轴(同步齿轮10、旋转盘体X)固定,2KH(C)型行星差动机构的行星架60旋转,即ω10=ωX=0,ω60≠0时,输入运动来自行星架60。行星架60和空套齿轮100A的传动比计算如下:
故可得空套齿轮100A(100B)的转速:
末级行星传动机构中丝杠齿轮110相对于旋转盘体X的旋转(自转)速度:
此工况下,根据上式可知,当齿轮机构参数确定时,丝杠齿轮110的转速仅与行星架60的转速相关。此时,主轴(旋转盘体X)静止,行星架60旋转,滑板径向运动,平旋盘可以实现加工前径向对刀。
2.3 工况3
当主轴(同步齿轮10、旋转盘体X)和行星架60同时旋转,即 ω10≠0,ω60≠0时,根据复合轮系的运动合成原理,此工况相当于工况1和工况2的运动叠加,空套双联齿轮100(100A,100B)由主轴(旋转盘体X)和行星架60共同驱动,其转速为
末级行星传动机构中的行星轮110相对于旋转盘体X的旋转(自转)速度为
此工况下,主轴和行星架60同时旋转,滑板产生径向进给运动,实现U轴功能,且丝杠齿轮110的转速仅取决于行星架60的转速(与工况2相同)。此时,平旋盘配合机床相关进给轴可以对变径回转特征轮廓进行加工,例如:管端坡口面、台阶面、锥面、锥螺纹、内外环槽和球面等。
3 一个特例
在图1所示的2K-H(C)型行星差动机构中,当中心轮锥齿轮的分锥角增大至90°时,其结构由锥齿轮转变为面齿轮,而行星轮锥齿轮则转变为圆柱齿轮,如图3所示。面齿轮-圆柱齿轮传动可以看成是锥齿轮传动的一个特例,其传动有如下特点[7-9]:

图3 平旋盘机构简图(基于面齿轮)
(1)面齿轮-圆柱齿轮传动中圆柱齿轮轴向受力为零且其轴向位置误差对传动精度无影响。
(2)面齿轮-圆柱齿轮传动重合度高,承载能力强,传动平稳。
(3)采用渐开线齿形的面齿轮-圆柱齿轮瞬时传动比恒定,满足机床进给轴的定位要求。
(4)面齿轮可以通过插齿、滚齿和磨齿等方式加工,能够实现AGMA 12级以上精度,适用于高速、高精度和重载传动的工况,目前已经广泛应用于直升机传动系统的设计。
综上所述,相较于锥齿轮传动,面齿轮-圆柱齿轮传动是一种更优秀的传动方式,可以更好地满足U轴传动的要求。
4 变型方案
在图1和图3基础上通过变换齿轮传动方式可得到多种变型以适应不同场景的工作需求。图4和图5为两种典型方案的机构简图[10]。

图4 变型方案:丝杠由一组小锥齿轮驱动

图5 变型方案:丝杠由蜗轮蜗杆驱动
此外,根据设计需求行星架60还可以由滚子凸轮、圆锥齿轮、圆柱齿轮、面齿轮-圆柱齿轮和力矩电机直驱等方式驱动;旋转盘体上还可以实现单丝杠(正反螺纹-双滑板或双丝杠-双滑板等结构以实现离心力平衡或双刀切削。
5 结语
本文以平旋盘为例介绍了一种基于2K-H(C)型行星差动原理的U轴机构,计算了不同工况下丝杠齿轮的转速,为U轴进给的参数设计提供了理论依据。文中所列方案传动原理简单,通用性好,变型方案多,适用于通用机床、专用机床、组合机床和机床功能部件的U轴机构设计。
猜你喜欢
当代陕西(2019年24期)2020-01-18
制造技术与机床(2019年11期)2019-12-04
制造技术与机床(2019年1期)2019-01-14
电子制作(2018年14期)2018-08-21
制造技术与机床(2017年9期)2017-11-27
制造技术与机床(2017年8期)2017-11-27
制造技术与机床(2017年3期)2017-06-23
电子制作(2017年10期)2017-04-18
科学与财富(2016年34期)2017-03-23
电子制作(2017年23期)2017-02-02
