
深海采矿动态数字孪生系统开发
2023-02-15 07:09罗岚周崇尧胡琼杨杰邹科屈衍
哈尔滨工程大学学报 2023年2期
罗岚, 周崇尧, 胡琼, 杨杰, 邹科, 屈衍,
(1.南方科技大学 海洋科学与工程系,广东 深圳 518055; 2.华南理工大学 海洋科学与工程学院,广东 广州 518110; 3.中南大学 机电学院,湖南 长沙 410083)
数字孪生(digital twin)的概念由Grieves[1]于2003年产品全生命周期管理课程中提出,称之为“镜像空间模型”,2011年正式确定“数字孪生”概念[2]。数字孪生利用信息处理层将物理空间与数字空间连接[2-3],集模拟、监控、计算、预测、调控于一体,具有安全、高效、精准的特点。目前关于数字孪生广泛接受的定义是:数字孪生是一个集多物理场、多尺度、多概率的仿真模型,能够利用物理模型、传感器数据和历史数据等反映该模型对应实体的功能、实时状态及演变趋势[4]。
动态数字孪生集成物理实体,高精度、多尺度数字模型,以及物理空间与数字空间状态信息,对物理实体的动态行为进行全方位、多尺度精准映射,实现对物理实体的状态信息采集与处理、动态行为实时映射、运行操作模拟规划、设备健康监测与管理,被认为是促进生产方式与管理模式变革的重要举措。该技术还可以融合大数据、人工智能算法等技术,实现物理空间状态预测,设备预防性维护,为建立服务于产品全生命周期的运行管理平台提供解决方案。
近年来,动态数字孪生在海洋工程领域逐渐得到研究与应用。挪威Oseberg-H海上无人井口平台利用动态数字孪生,实现平台无人化生产运行,使其开发与运营成本比原计划降低约20%[5]。Shim等[6]提出使用动态数字孪生,对混凝土桥梁进行建模、分析、设计、监控以及预防性维护等,提高桥梁安全性。Sivalingam等[7]利用动态数字孪生,评估海上风力涡轮机的剩余使用寿命,对其进行故障诊断以及预防性维护。Renzi等[8]利用动态数字孪生,对海上浮式生产系统进行资产管理与分析,提高管理效率,降低人员管理成本。Coraddu等[9]利用动态数字孪生,评估环境污染对行船速度的影响,提升船舶的行驶效率。
近年来,深海采矿行业得到越来越多的重视。深海采矿系统通常为超深水作业,水深范围达到4~6 km,作业环境苛刻,系统集成协调配合要求高,需要对系统进行全方位、多尺度监测与管理。动态数字孪生技术的完善和提出,为深海采矿过程状态监测与系统控制提供了理想的解决方案。将动态数字孪生技术应用于深海采矿作业全生命周期[10],实现采矿过程数字化、可视化、智能化,是保障深海采矿系统安全、高效作业的有效手段。本文针对常见深海采矿系统特点,探讨了深海采矿动态数字孪生系统的结构、功能及构建方法。
1 深海采矿系统简介
典型深海采矿系统由集矿机系统、矿物输送系统、立管系统、水面母船系统等4部分组成,如图1所示。深海采矿系统作业流程如下:

图1 深海采矿系统组成Fig.1 Composition of the deep-sea mining system
1)水面母船将采矿设备运送到工作海域,完成集矿机系统、矿物输送系统、立管系统布放与调试;
2)集矿机行驶至作业区域后,开始进行集矿作业;
3)集矿机通过矿物输送系统,将采集的矿物输送至中继器;
4)通过立管系统中的扬矿泵将中继器中的矿物提升至水面母船;
5)采矿作业结束后,各子系统依次回收至水面母船。
深海采矿动态数字孪生系统应用框架由物理空间、数字空间、信息处理层3部分组成,三者通过数据连接形成闭环融合。系统在应用过程中,数字空间可对物理空间进行全方位、多尺度动态建模、实时映射,结合物理算法对物理空间进行状态预测,为未来运行方案制定提供参考,提高深海采矿系统控制水平。
通过动态数字孪生实现深海采矿智能化作业后,设备操作方式将转为使用经过动态模拟验证后的作业方案驱动采矿设备运行,主动引导采矿系统状态变化,提高作业效率与安全性。深海采矿动态数字孪生系统应用框架如图2所示。

图2 深海采矿动态数字孪生系统应用框架Fig.2 Application framework of dynamic digital twin system of deep-sea mining
动态数字孪生系统服务于深海采矿全生命周期,将实现功能如下:
1)采矿作业前:对采矿方案进行可视化模拟预演,结合历史数据,对采矿方案进行优化,同时储存模拟数据,为今后方案制定提供参考;
2)采矿过程中:对采矿过程进行实时映射,对采矿系统各设备及人员进行智能管理与调度,预测危险状况并辅助生成解决方案,操作人员下达的指令可先行在数字孪生系统中得到验证,避免人为因素引起的作业事故发生;
3)采矿过程结束后:依据采矿过程中的实时数据,重新模拟、分析采矿作业过程,发现操作不当之处,进行采矿方案二次优化。
2 深海采矿动态数字孪生系统开发
深海采矿是在复杂海洋环境中作业的大型复杂海洋工程作业系统。建立满足其工程作业监控及控制的动态数字孪生系统也是一个复杂的系统工程。深海采矿动态数字孪生系统开发流程可分为4步:数据采集与处理、数字化建模、功能实现、智能作业。具体流程如图3所示。
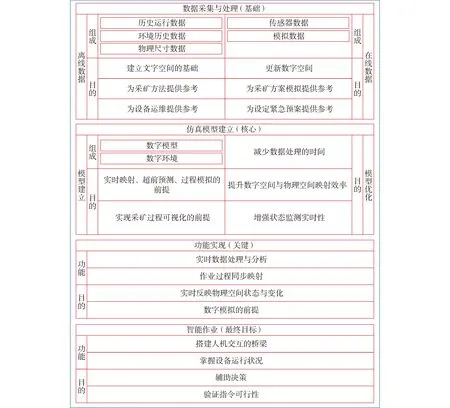
图3 深海采矿动态数字孪生系统开发流程Fig.3 Development process of dynamic digital twin system of deep-sea mining
本文使用Unity 3D引擎开发基于状态诊断的深海采矿动态数字孪生系统。该引擎是一款由Unity Technologies公司开发的3D引擎。该引擎具有强大的通用性、较低的开发成本、逼真的视觉画面、便捷的人机交互性、支持多平台发布,且脚本语言书写方便等特点,广泛应用于游戏开发、建筑可视化、实时三维动画等应用[11]。
2.1 深海采矿系统数字化建模
深海采矿系统数字化模型包含深海采矿技术装备数字化模型与作业环境数字化模型。深海采矿技术装备数字化模型要求可以准确反映物理实体形状尺寸、物理属性与机械性能等信息;作业环境数字化模型要求准确反映采矿作业环境风浪、海底地形等信息。当接收到物理空间实时数据后,可将数据存入数据库的同时,在数字孪生系统界面进行数据显示,并使用数据驱动数字化模型,对物理空间进行实时映射,实现物理空间与数字空间深度融合,监控与管理采矿系统作业过程。目前国内深海采矿仍处于海上试验阶段,本文结合海试系统要求,主要对作业环境,采矿装备包括采矿船、采矿车、中继站、立管及输送软管系统运动和位移状态开展了动态数字孪生构建工作,如图4所示。
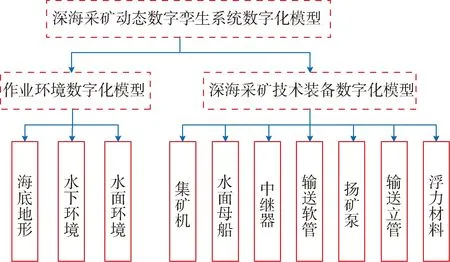
图4 深海采矿系统数字模型Fig.4 Digital model of deep-sea mining system
2.1.1 数字环境搭建
作业环境数字化模型包括真实的海底地形、波高与波频可动态调整的水面环境以及有扰动效果的水下场景。本文海底地形数字化模型构建过程为确定作业区域后,采集该区域海底散点高程数据,由于数据密度有限,本文采用双调和样条插值加密生成地形模型。该插值方法的原理是使用已知的局部数据点反演未知数据点信息,用局部解代替全局解,解决了大量数据集插值计算效率低的问题[12]。原理如下:
离散数据拟合可表示为:
Z(x)=φ(x1,x2,…,xn)
(1)
简写为:
Zj=φ(xj),j=1,2,…,n
(2)
式中:x1,x2,…,xn为采样点x的n维坐标数;Z(x)为采用点x的数值;φ为映射关系。
对式(1)两边建立双调和方程,可表示为:
(3)
式中:▽4为双调和操作符;Wj为加权数;δ为采样函数。
方程(3)通解为:

(4)
式中Gm为m维双调和格林函数。
将式(2)代入式(4),得到

(5)
因此,可根据式(5)任意输入坐标点xi计算出该点插值结果。通过插值计算得到海底地形三维模型如图5所示。

图5 海底地形三维模型Fig.5 3D digital model of seabed terrain
2.1.2 深海采矿装备建模
深海采矿装备数字化建模包括对水面母船、中继器、集矿机、扬矿泵、立管、输送软管以及浮力材料等技术装备进行数字空间映像。数字化模型要求可准确反映各类装备几何尺寸、表面材质、物理属性、机械性能等多个尺度的属性。系统先进行初步计算得到初始状态。当动态数字孪生系统接收到物理空间实时数据,可在用户界面显示数据的同时,驱动数字化模型运动,对数字化模型不断更新,实现采矿作业过程实时映射。深海采矿技术装备数字化模型如图6所示。

图6 深海采矿装备系统动态数字孪生模型Fig.6 Dynamic digital twin system for deep-sea mining system
2.2 动态数字孪生模型参数预设
数字孪生模型的参数预设是对装备模型及系统运动状态的参数化设置,通过使用物理模型信息数据的采集和对数字模型参数的同步更新,可以实现对数字化空间动态映射。是动态数字孪生系统构建的关键步骤。本文深海采矿数字孪生系统主要采用如下参数进行定义。
2.2.1 主要设备运功功能预设
水面母船A型架对集矿机进行起吊,转动过程通过油缸活塞伸缩驱动实现。首先对油缸添加关节约束,给定油缸活塞伸长量,驱动A型架转动。通过输入活塞伸长量控制A型架运动逻辑判断如图7所示。

表1 深海采矿数字孪生系统主要参数Table 1 Deepsea mining digital twin system parameters

图7 A型架运动逻辑判断Fig.7 Logic judgment diagram of A-frame movement
集矿机运动通过履带转动实现,因此在给定集矿机运动速度时,履带要根据运动速度进行转动,并在海底地形数字化模型上留下履带驶过痕迹。
对履带转动过程预制动画,当给定集矿机运动速度后,根据运动速度以及运动方向调整动画播放速度以及播放顺序,模拟集矿机运动过程中履带转动效果。集矿机运动效果如图8所示。

图8 集矿机运动效果Fig.8 Movement effect diagram of mining collector
2.2.2 输送软管线型模拟
集矿机采集到的矿物通过输送软管输送至中继器,因此输送软管状态对采矿过程安全性至关重要。由于技术及成本原因,采矿系统只能布置两个信标点对软管状态进行监测,需要结合数值分析方法求解悬链线方程确定软管整体线型及位置状态。
本文采矿软管悬链线方程推导过程如下:设输送软管质量均匀,单位长度质量为ω0,且处于平衡状态。取输送软管上任意一点A(x,y(x))以及附近一点B(x+Δx,y(x+Δx)),其中Δx→0,A点所受张力为T(x),B点所受张力为T(Δx),设AB段长度为dl,则:
d2l=d2x+d2y
(6)
输送软管处于平衡状态,故合外力为0,则B点垂直张力为:
Ty(x+Δx)=Ty(x)+ω0dl
(7)
其中Ty(x)为A点所有垂直张力。A点与B点水平张力满足:
Tx(x)=Tx(x+Δx)=k
(8)
将式(15)代入式(16),得:
(9)
则:
(10)
即:
(11)
由于AB段长度趋于0,力的方向与AB段线形方向相同,故:
(12)
将式(11)代入式(12),得:
(13)
两边积分同时对x,得:
(14)
2.3 物理空间实时数据采集与处理
物理空间实时数据采集内容主要包括深海采矿系统各子系统运行数据,如集矿机及水面母船行驶速度、母船A型架油缸伸长量、输送软管信标点位置坐标、中继器位置坐标、各类报警器状态等。通过实时数据对数字化模型进行驱动控制,实现在数字空间对物理空间进行实时映射。
深海采矿动态数字孪生系统使用OPC UA (OPC unified architecture)统一架构接口协议进行数据传输。传感器采集的设备运行数据通过局域网传输至服务器,当动态数字孪生系统运行时,系统作为客户端,与服务器建立连接,接收数据并进行解析,解析的数据发送至内存缓冲区的同时数据库中进行存储。系统在缓冲区中读取数据,驱动相应的数字模型,实现实时映射的效果。
OPC UA接口协议通用性好、集成性高、通讯性能优越,保证了数据传输的可靠性与安全性。因此,极大提升了数字孪生系统运行的稳定性与准确性。
3 深海采矿动态数字孪生系统运行
深海采矿动态数字孪生系统是一个以数据为纽带,连接各子系统,使其紧密配合联动的系统。所有数据各子系统共享,形成一个完整的信息闭环,实现了不同数据源的数据实时高效流通,避免产生数据孤岛。系统运行流程如图9所示。

图9 深海采矿动态数字孪生系统运行流程Fig.9 Operation process of dynamic digital twin system of deep-sea mining
1)通过数据采集系统,得到深海采矿系统全部数据,数据可为2类,即离线数据与在线数据。离线数据即采矿设备物理属性与几何尺寸,是构建数字空间的基础;在线数据即设备运行数据与环境信息,记录物理空间在时间尺度上的状态信息。
2)将数据采集系统中的所有数据传递至数据库中,作为数字化建模、实时映射、采矿方案制订以及采矿过程重演的重要依据。将离线数据传递至模型创建系统,用于生成与物理空间完全一致的数字空间;将在线数据传递至数据处理系统,对关键数据进行处理分析,去除杂项数据与异常数据,提高数据采集准确性。
3)数字化模型与处理完毕的实时数据在仿真系统中进行深度融合,实现数字空间对物理空间的实时映射、状态预测及对采矿设备交互控制,实现深海采矿系统数字化、可视化、智能化运行。
由于深海采矿尚未开展实际生产作业,本文开发的深海采矿动态数字孪生系统在实验中进行了测试与应用。现场实验中动态数字孪生系统控制与显示台如图10所示。

图10 动态数字孪生系统实际操作与显示工作台Fig.10 Control console of dynamic digital twin system of deep-sea mining
动态数字系统实现了对深海采矿全系统近200余项数据的实时采集与处理,并对数据进行同步显示,对异常状态进行报警提示。同时,驱动水下作业车、支持船、中继器、输送软管等数字化模型运动,实时更新数字孪生模型状态,实现系统作业过程三维动态显示,为设备操作提供了直观、准确的视觉参考。系统数据每0.02 s新一次,保证了状态监控的实时性,提高了系统的安全性与作业效率。
4 结论
1)深海采矿数字孪生系统开发过程包括数字化建模、数字模型运动功能实现、用户界面开发、数据采集与处理以及系统实验应用。
2)动态数字孪生系统可以结合机器学习、强化学习、神经网络等技术,对设备运行状态进行仿真与预测,实现系统整体状态智能监控、风险预警、数字化运维,将在未来的深海采矿工程及相关的海洋工程作业中发挥重要作用。
猜你喜欢
井冈教育(2022年2期)2022-10-14
卫星应用(2022年7期)2022-09-05
卫星应用(2022年3期)2022-05-23
卫星应用(2022年1期)2022-03-09
中学生数理化·八年级物理人教版(2019年9期)2019-11-25
小哥白尼(趣味科学)(2019年7期)2019-11-16
环球慈善(2019年6期)2019-09-25
学苑创造·A版(2017年4期)2017-05-13
学苑创造·A版(2017年5期)2017-05-09
中学生数理化·中考版(2017年12期)2017-04-18
