
基于MRF的遥操作机器人触觉反馈装置设计与仿真
2023-02-03 04:57于川张林帅顾硕鑫蒋涛奉瑜
机床与液压 2023年1期
于川,张林帅,顾硕鑫,蒋涛,奉瑜
(1.成都信息工程大学,四川成都 610225;2.西北工业大学,陕西西安 710129;3.成都中医药大学,四川成都 611137)
0 前言
当人与环境交互时,力反馈或触觉反馈是一种十分重要的感知形式,可以将环境信息以更加自然、更加真实的方式反馈给施力者的感觉器官,使其能够更为有效地完成较为复杂的任务[1]。同样地,在操作者通过操作系统或装置在与环境交互的过程中,向环境输入力时,希望环境能够反馈给操作者以力或运动,使其产生身临其境之感[2](人手指最小感知力约为0.019 N[3])。
力反馈或触觉反馈装置与远程操作装置结合具有非常大的应用前景,人们往往因无法有效感知远程未知的操作环境而降低了操作效率,同样其安全性也得不到保障。例如在医疗、微操作技术领域[4],医生常利用现代高科技手段进行一种微创性治疗,即血管介入手术治疗。手术医生在血管造影成像(Digital Subtraction Angiography,DSA)系统的帮助下,通过导管和导丝在患者血管中运动,最终达到栓塞畸形血管、溶解血栓和扩张狭窄血管等治疗目的[5]。但许多医生声称,该领域的进一步发展受到限制,即缺乏对医生的力或触觉反馈[6],医生在操作过程中一直保持注意力而易感到疲劳,使手术的风险性增大。
本文作者设计了一种基于磁流变液(Magnetorheological Fluid,MRF)的遥操作机器人主端触觉反馈装置,可应用在远程微操作技术领域中。此研究以磁流变液及阻尼器相关原理为理论基础,采用磁流变液阻尼器的Bingham力学模型为模型基础,在Simulink中建立动力特性仿真,分别注入两种不同型号的磁流变液MRF-122EG和MRF-132DG,测试该装置力学性能,将相关动态特性曲线进行比较分析[7],以期能够帮助实现对于远程未知环境的有效感知,实现临场操作感,提高操作效率与安全性。
1 磁流变阻尼器原理
磁流变液是一种特殊的可控流体,由具有较强磁导率、较弱磁滞性的磁性颗粒和不能导磁的液体混合而成。如图1所示,在零磁场状态下,磁流变液中的磁性颗粒随机均匀地散布在混合液里,以牛顿流体形式作黏性流动,黏度非常低[8];当施加外部磁场时,磁流变液会产生特殊的磁流变效应,使磁链结构发生变化,磁流变液中的磁性颗粒顺着磁场线的方向形成结构较为稳定的链状,并且磁链会因磁场强度的增大,而越来越牢固稳定,在磁场作用下,磁流变液的黏度将呈数量级增强,并且随着磁场强度的增大,呈现出固体特性[9-10]。此变化可以双向进行,即当外加磁场消失后,磁流变液恢复到原有的流体状态。
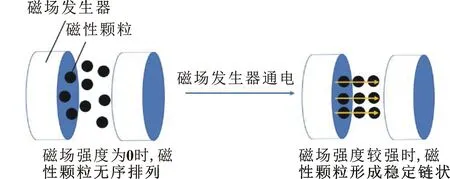
图1 磁流变效应原理Fig.1 Schematic diagram of magnetorheological effect
磁流变液阻尼器是一种半主动结构减震装置,能够提供运动阻力、耗减运动能量。该装置利用磁流变液所产生的磁流变效应,通过改变外加磁场进而改变刚度和阻尼值,是一种结构简单、响应迅速、可调范围广的可控阻尼器,被广泛应用于汽车、建筑、军事等减震控制领域,作为减震系统中的重要装置[11-12]。该阻尼器主要有3种基本工作模式:流动模式、剪切模式、挤压模式,如图2所示。在流动模式下,磁流变液被填充于两块静止不动的极板间。当外界施加的磁场穿过两极板并垂直作用于磁流变液时,磁流变液的黏度随磁场发生变化,故其在两板间流动时所受的阻力也随之发生变化,此变化与磁场变化成一定正比,且当磁场增大到一定值后,所受阻力大小趋于稳定[13]。剪切模式则是在一块固定而另一块可运动的两块极板中填充磁流变液,极板在力的作用下以一定速度进行运动[14];同样地,在外加磁场作用下,磁流变液黏度发生改变,流动性降低,对极板的运动产生阻力作用。挤压模式则是将两块极板在相对力的作用下向填充磁流变液的空间进行挤压,使磁流变液流动,外加磁场后磁流变液黏度发生变化,从而产生阻尼力。以上3种工作模式均是在施以外加磁场的条件下实现的,故可通过控制磁场强度实现对阻尼器所产生的阻尼力的间接控制。
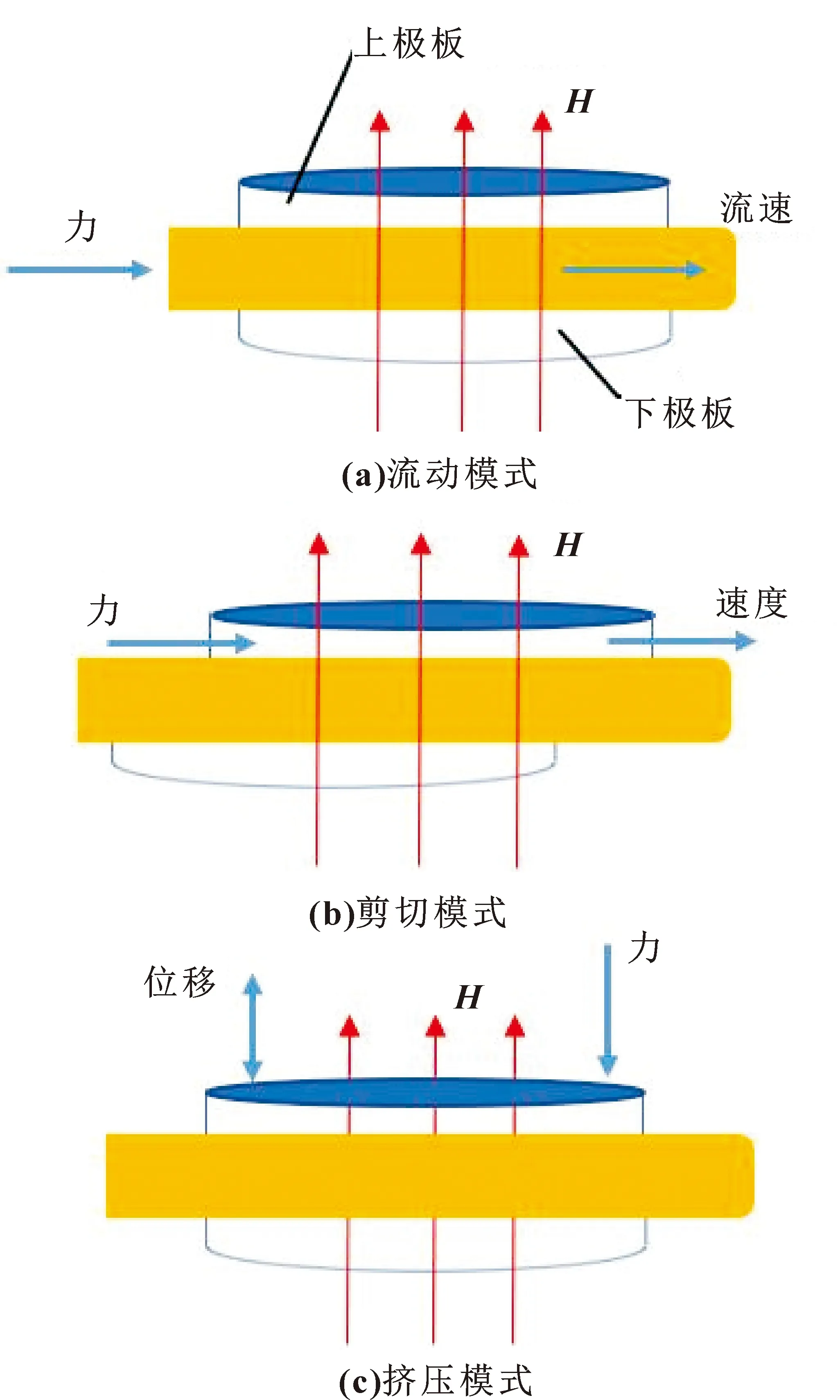
图2 阻尼器基本工作模式
2 机器人主端触觉反馈装置结构设计
在遥操作领域中,需实现遥操作机器人与环境之间的触觉力反馈,磁流变液阻尼器是其中的重要组成部分[15]。机器人主端触觉反馈装置如图3所示,主要由操作杆、磁流变液阻尼器外壳、永久磁铁、海绵圈、磁流变液容器、铜线圈、螺纹紧固盖组成。
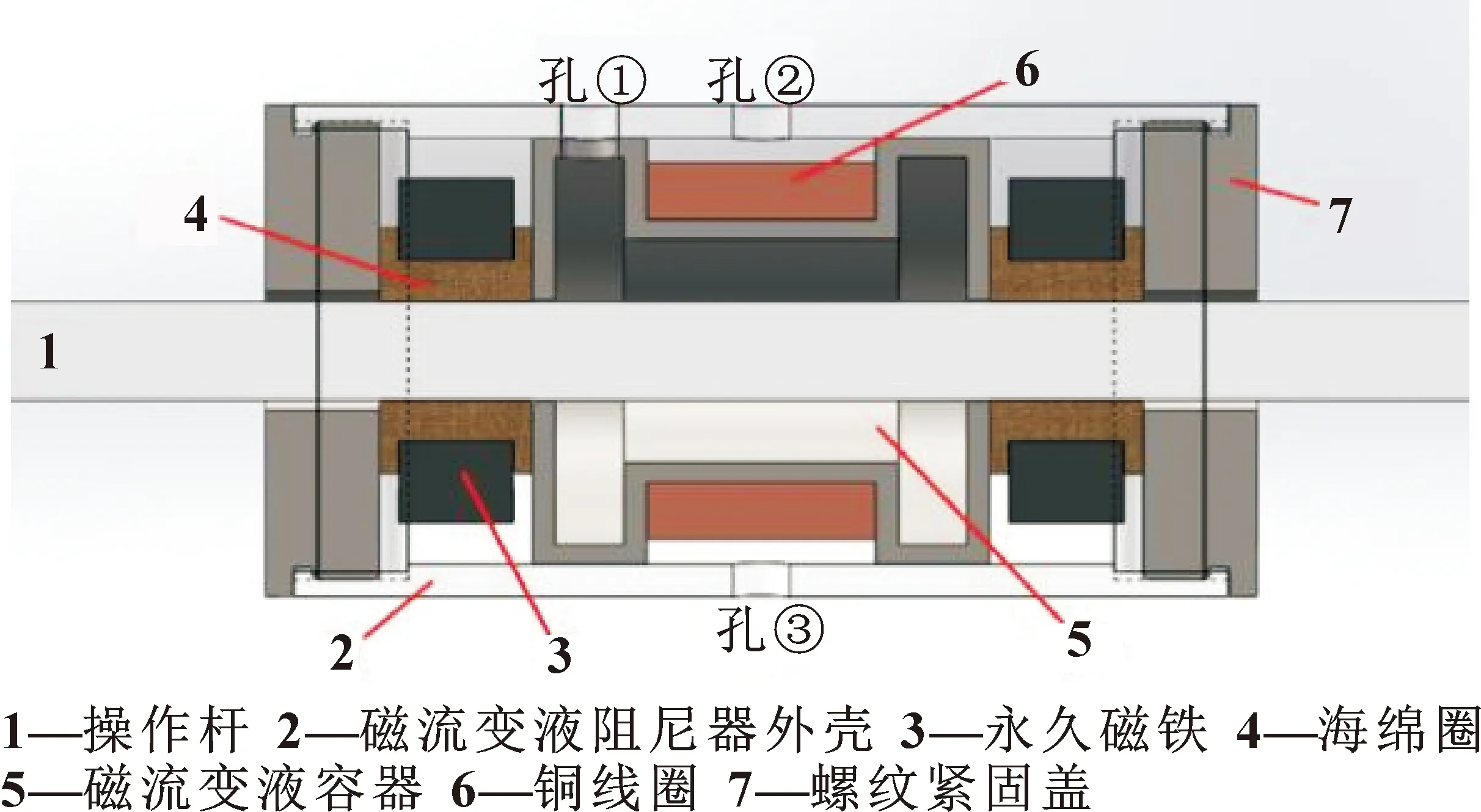
图3 磁流变阻尼器结构Fig.3 MR damper structure
铜线圈由导电铜丝缠绕铁芯而成,能够产生均匀的垂直于磁流变液流动方向上的磁场,将铜线圈与磁流变液容器间隙配合;在海绵圈上下两面开凿一个直径略小于永久磁铁直径的凹槽,因海绵的韧性将永久磁铁镶嵌于海绵之中,实现固定;海绵圈位于磁流变液容器与螺纹紧固盖之间,其最大半径与阻尼器外壳内径相同,两者之间为间隙配合;磁流变液容器与阻尼器外壳通过过盈配合进行固定,实现装配。
磁流变液阻尼器一定程度上解决了现有阻尼器无法解决的两个关键问题。首先,磁流变液阻尼器解决了磁流变液阻尼器的漏液问题,操作杆直接与海绵圈接触,虽然磁流变液容器侧孔直径略大于操作杆直径,但由于磁流变液的组成成分包含磁性颗粒,即使有少量通过侧孔溢出容器,阻尼器外壳中的两侧海绵也会将工作时操作杆上依附的少许磁流变液吸附,从而防止磁流变液溢出至阻尼器外。其次,设计的磁流变液阻尼器能够有效减小阻尼器结构设计中自身部件之间所产生的摩擦力对阻尼功能实现的影响。磁流变液阻尼器外壳分别与海绵圈和操作杆存在一定间隙(操作杆直径12 mm,海绵圈孔直径12.1 mm,阻尼器外壳侧孔直径12.4 mm),这保证了操作杆与磁流变液阻尼器外壳之间不会产生摩擦力。
现有的磁流变液阻尼器设计中,大多没有为便于磁流变液的装罐与倒液的相关设计。鉴于磁流变液阻尼器应用场合的特殊性,操作杆贯穿于整个磁流变液容器,故为便于磁流变液的注入与倒出,作者在磁流变液容器及阻尼器外壳上方开凿孔①作为注液孔,其作用在于:在阻尼器初次使用或测验时,首先将操作杆贯穿阻尼器,再通过注液孔向磁流变液容器中注入磁流变液,以保证磁流变液不会泄漏;同时,若对于磁流变液型号选择有所改变,也可通过注液孔将原有磁流变液从注液孔倒出,待清洁干净磁流变液容器后替换上新的所需磁流变液;阻尼器外壳上下对称的孔②与孔③用于为上下两个铜线圈通电,为磁流变液提供发生磁流变效应所需的磁场环境。
磁流变液阻尼器中,操作杆作为阻力感知部件,当产生阻力时,控制操作杆在阻尼器中进退的操作者可通过触觉的形式感知这一阻尼力。例如,医生通过遥操作机器人进行远程血管介入手术时,若手部感知到一定的阻尼力,便可得知当前手术推进过程中导丝与血管壁之间碰撞力有破坏血管的风险,需停止前进或调整导丝推进角度后继续进行手术。
3 磁流变液阻尼器力学模型的建立
上述对磁流变液阻尼器的机械结构设计决定了磁流变液阻尼器的各项性能指标,如响应速度、动态调节范围、耐久性等,而建立精确的磁流变液阻尼器力学模型是对所设计的磁流变液阻尼器进行相关分析和参数修正的一个重要环节,因此,磁流变液阻尼器力学模型的建立对结构优化设计和获得良好的控制效果具有十分重要的意义[16]。
目前,国内外诸多学者对磁流变液阻尼器的动力学模型进行了多方深入的研究,例如STANWAY等提出了一种能够模拟F-X响应的Bingham模型,祝世兴等对以Bingham模型为基础的线性与非线性模型进行参数辨识,并对磁流变阻尼器的非线性双黏性力学模型进行了改进研究[17-18]。Bingham模型是应用于磁流变液阻尼器最多、最早的研究模型,如图4所示,该模型将磁流变阻尼器等效为一个线形黏滞性阻尼器和一个库仑摩擦元件相并联[19]。

图4 Bingham模型Fig.4 Bingham model
在稳态剪切场下,得到磁流变液的剪切应力应变关系为
τ=τysgn(γ+ηγ
(1)
式中:τ是磁流变液的剪切应力;τy是磁流变液的屈服应力;η是磁流变液的黏度系数;γ是流体的剪切应变速率;sgn()是符号函数。
根据式(1)可推导出剪切模式下阻尼力与速度的关系式(2):
F=C0v+Fτsgn(v)
(2)
式中:F是磁流变液阻尼器在磁场作用下所产生的阻尼力;v是操作杆在阻尼器中的运动速度;C0是磁流变液的阻尼系数;Fτ是与外加磁场相关的屈服应力。
结合文献所设计的磁流变液阻尼器的相关结构参数,可将C0、Fτ分别表示为
(3)
(4)
式中:L表示阻尼器设计中操作杆在磁流变液容器中的有效长度;D表示磁流变液容器的内径;h表示操作杆与磁流变液容器之间的间隙;S表示操作杆与磁流变液容器的有效面积。故式(2)进一步可由式(5)表示:
(5)
4 磁流变阻尼器模型仿真分析
采用美国Lord公司生产的MRF-122EG和MRF-132DG磁流变液作为设计研究对象,该型号磁流变液能够快速可逆地响应磁场变化,在零磁场状态下提供较低的屈服强度,在外加磁场状态下提供较高的屈服强度,具有宽范围的可控性和高耐温性,满足应用要求,其基本参数如表1所示。
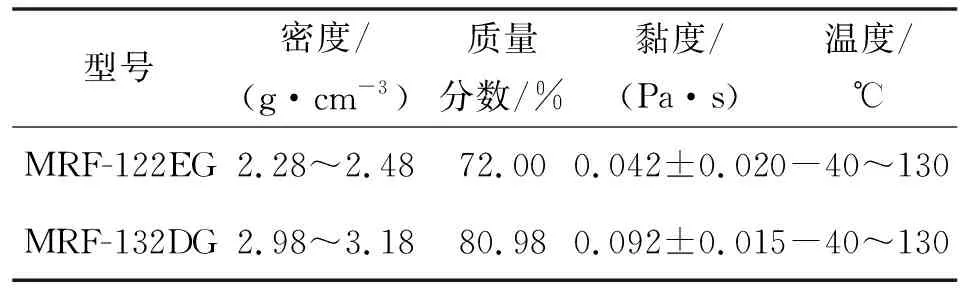
表1 Lord磁流变液基本参数Tab.1 Basic parameters of Lord magnetorheological fluid
屈服应力τ作为磁流变液阻尼力的重要参数,由于不同磁流变液厂家所生产的产品基本参数不同,其与磁场强度H的关系也略有不同。文中所选用的Lord磁流变液MRF-122EG和MRF-132DG屈服应力τ与磁场强度H的关系如图5所示。
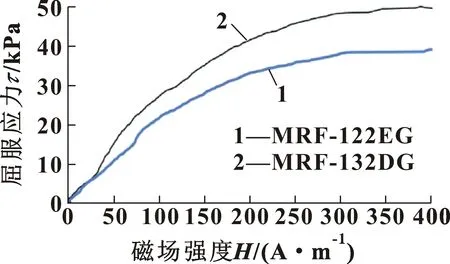
图5 屈服应力τ与磁场强度H关系
图5表明:屈服应力τ随磁场强度H的增大而增大,但并非是正比关系,当磁场强度H增大到一定值后,屈服应力τ将趋于一个定值。文中将屈服应力τ与磁场强度H之间的关系通过分别拟合正比部分以及定值部分来确定,得到基于磁流变液MRF-122EG和MRF-132DG的屈服应力τ与磁场强度H的拟合关系分别见式(6)、(7)。
(6)
(7)
所设计的磁流变液阻尼器的主要结构参数如表2所示。
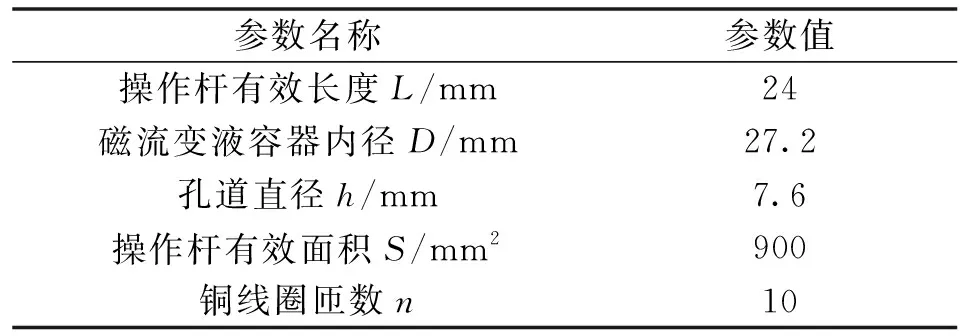
表2 磁流变液阻尼器主要结构参数Tab.2 Main structural parameters of MR fluid damper
铜线圈通电产生磁场的关系式为
(8)
式中:H为磁场强度;n为线圈匝数;I为通电电流大小;L为产生磁场的有效磁路长度。根据磁流变液阻尼器的结构设计,铜线圈选用直径为0.54 mm的铜线,绕10匝。
式(6)(7)结合式(8),得出屈服应力τ与电流I的关系式为
(9)
(10)
在Simulink中,分别对两种不同型号的磁流变液MRF-122EG和MRF-132DG的屈服应力τ与电流I建立数学模型,得到如图6、图7所示方框图。

图6 基于MRF-122EG的MR阻尼器屈服应力τ的Simulink方框图
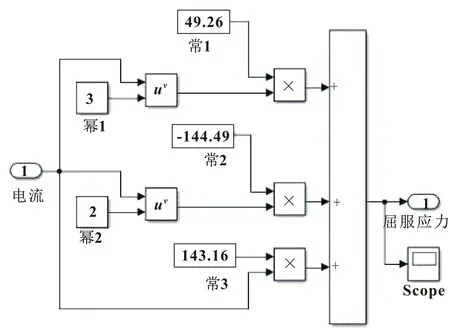
图7 基于MFR-132DG的MR阻尼器
结合磁流变液性能参数和阻尼器结构参数,得到阻尼力F与屈服应力τ(I)和速度v的关系式:
F1=0.248 8v+0.008 5τ(I)sgn(v)
(11)
F2=0.622v+0.008 5τ(I)sgn(v)
(12)
将阻尼器分别注入磁流变液MRF-122EG和MRF-132DG,施加一定磁场,以一定速度推进操作杆,建立力学仿真模型,如图8、图9所示。
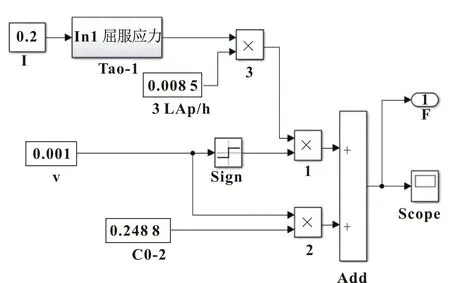
图8 基于MRF-122EG的MR阻尼器阻尼力F1的Simulink方框图
图9 基于MFR-132DG的MR阻尼器阻尼力F2的Simulink方框图
对所设计磁流变液阻尼器建立Bingham模型并进行相关力学测试,包括测试操作杆在同种磁流变液中移动速度一定的情况下,施加在磁流变液阻尼器上的电流与其产生阻尼力的关系;测试改变磁场强度(改变电流)的条件下,阻尼器的操作杆在同种型号的磁流变液中移动,其速度与其所受阻尼力的关系;测试操作杆在同种磁流变液中移动速度不同时,电流与阻尼力的关系。仿真分析工况为:操作感移动速度分别为1、2、5 mm/s;施加电流分别为0.1、0.3、0.5、0.7 A。
上述Simulink模型中,操作杆移动速度v可以由手术医生自行控制大小,将速度v看作常数,只考虑电流I与阻尼力F的关系。分别将操作杆移动速度v设定为1、2、5 mm/s。由基于上述两种型号磁流变液的Simulink模型进行仿真,仿真结果如图10—图12所示。
图10 基于不同磁流变液的MR阻尼器在v=1 mm/s时阻尼力与电流的关系曲线
图11 基于不同磁流变液的MR阻尼器在v=2 mm/s时阻尼力与电流的关系曲线
图12 基于不同磁流变液的MR阻尼器在v=
图10—图12分别表示了两种型号的磁流变液在操作杆推进速度为1、2、5 mm/s时电流I与阻尼力F的关系,由于两型号磁流变液黏度系数等性能参数不同,故关系曲线不同。改变施加在铜线圈中的电流I大小进而改变磁场强度H,结合上述图5,结果表明:磁流变液屈服应力τ随磁场强度H的增大而增大而非简单的正比关系,随着所施加电流的增大,屈服应力τ将趋于一个定值,由关系式传递性易知,当电流增大到一定值后,所产生阻尼力F也将趋于稳定。
磁流变液MRF-122EG和MRF-132DG在电流为0.1、0.3、0.5、0.7 A时磁流变液阻尼器速度v与阻尼力F的关系如图13、图14所示。
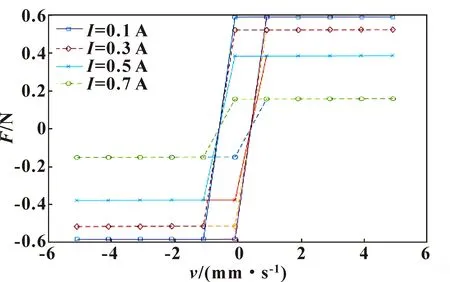
图13 基于MRF-122EG的MR阻尼器在电流变化时阻尼力与速度的关系曲线

图14 基于MRF-132DG的MR阻尼器在电流变化时阻尼力与速度的关系曲线
同型号的磁流变液在不同速度下电流I与由磁流变液阻尼器产生的阻尼力F的关系如图15、图16所示。
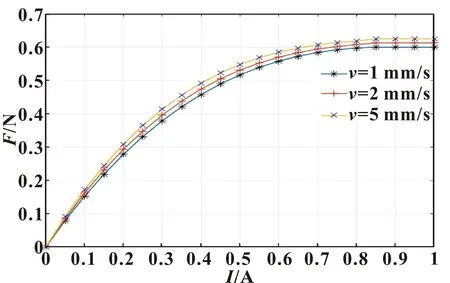
图15 基于MRF-122EG的MR阻尼器在速度变化时阻尼力与电流的关系曲线
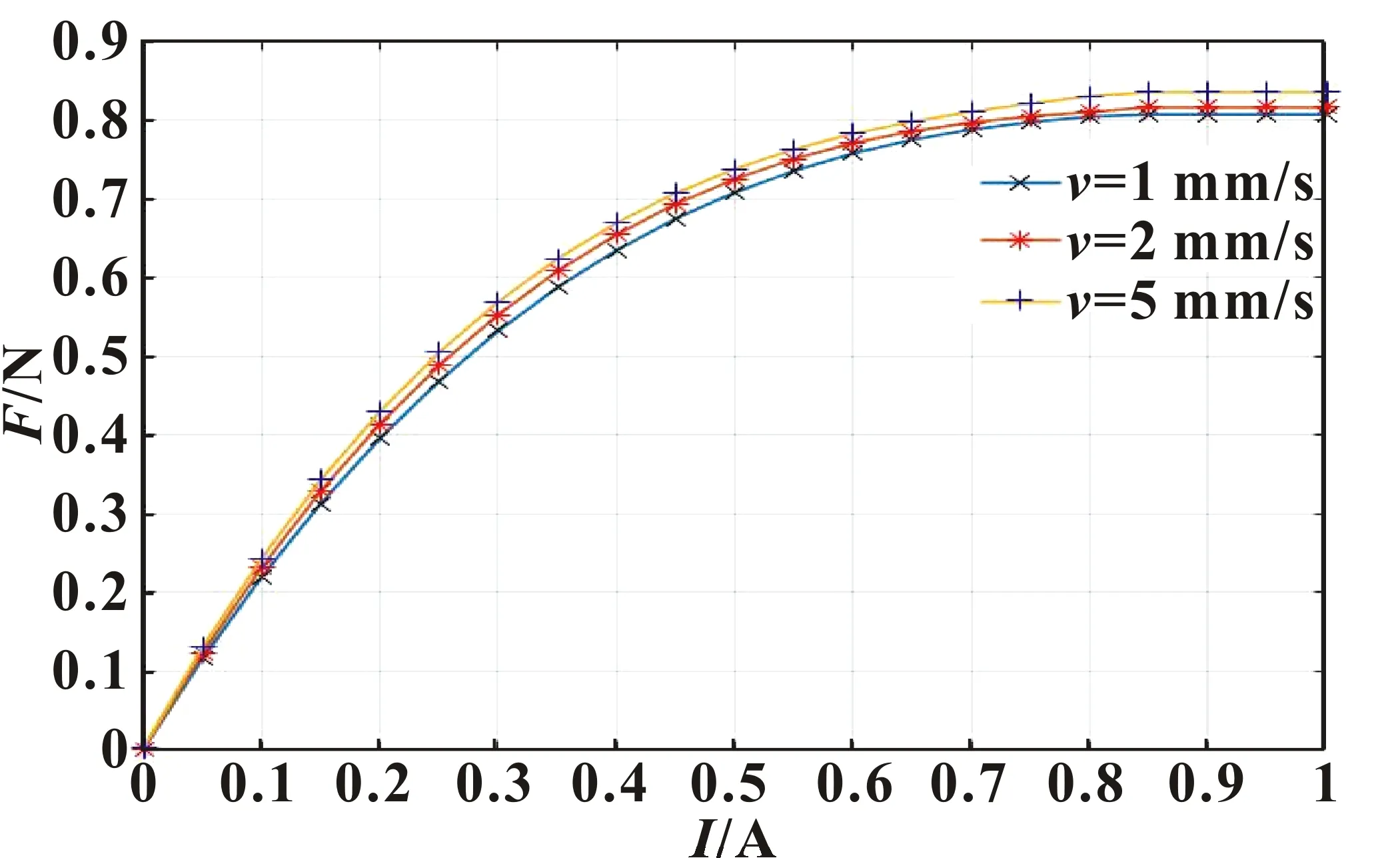
图16 基于MRF-132DG的MR阻尼器在速度变化时阻尼力与电流的关系曲线
5 结论
在遥操作机器人的应用场景下,以磁流变液及阻尼器相关原理为理论基础,采用磁流变液阻尼器的Bingham力学模型为模型基础,针对现有磁流变阻尼器漏液、结构设计中自身部件之间所产生的摩擦力对阻尼功能实现影响较大等问题,设计了一种基于磁流变液的机器人主端触觉反馈装置。在Simulink中建立了磁流变液阻尼器的力学模型,并通过仿真实验验证了该设计的力学性能及可行性,使得该装置能够在远程微操作中(如微创血管介入手术)给操作者提供一个可感知的触觉力反馈,实现远程碰撞感知,提高操作安全性和有效性。同样地,基于磁流变液的遥操作机器人主端触觉反馈装置不仅可应用在上述如血管介入手术的导管类微操作领域中,对于装配、康复训练、工业等远程微操作技术领域,该主端触觉反馈装置仍具有适用性。
结果表明:
(1)有限的操作杆移动速度v值改变时,对阻尼力F的影响很小。
(2)随着电流增大,磁流变液逐渐表现为黏塑性特性,当电流大于一定值后,磁流变液阻尼器所产生的阻尼力F将趋于稳定。原因在于电流对于屈服应力的影响有着饱和性,磁流变液的屈服应力会随着电流的增大而增大,但最终到达一定峰值并趋于稳定,由于关系式的传递性,故最终阻尼力F趋于某个稳定值。
(3)当为阻尼器施加电流达到0.85 A时,注入型号为MRF-122EG的磁流变液的阻尼器会产生约0.6 N的阻尼力,注入型号为MRF-132DG的磁流变液的阻尼器会产生约0.8 N的阻尼力,远远大于0.019 N(手指最小感知力),因此,当阻尼器处于工作状态时,即可为操作者提供一个可明显感知的阻尼力,从而实现触觉反馈提示碰撞的效果。
猜你喜欢
疯狂英语·初中天地(2022年9期)2022-08-29
轻工机械(2021年1期)2021-03-05
北京理工大学学报(2020年11期)2020-12-15
中国制笔(2020年2期)2020-07-03
商品与质量(2019年47期)2019-06-18
农业科技与装备(2017年4期)2017-08-17
科技创新与应用(2017年10期)2017-04-26
科技资讯(2017年3期)2017-03-25
中小企业管理与科技·中旬刊(2016年3期)2016-04-22
太原理工大学学报(2015年3期)2015-12-17
