
新型仿生水-空跨介质航行器结构设计
2023-01-27 05:45李宏源陈迎亮吕鹏宇段慧玲
水下无人系统学报 2022年6期
李宏源 ,吕 凯 ,陈迎亮 ,朱 敏 ,吕鹏宇 ,段慧玲
(1.北京大学 工学院,北京,100871;2.中国船舶集团有限公司 第705 研究所昆明分部,云南 昆明,650101;3.北京大学 南昌创新研究院,江西 南昌,330096)
0 引言
水-空跨介质航行器是一种可以自由跨越水-空界面,灵活切换工作环境的新型海洋装备,融合了水下滑移边界减阻[1]、超空泡水翼、仿生变体等技术,具有自主性强、高效机动、可适应复杂水况等优点。在军事领域,跨介质航行器的两栖作业特性使其在众多应用领域具有其他无人系统无法比拟的优势。跨介质飞行器可以远距离发射,自主飞行到目标区域实现潜水侦察、监视或突袭攻击。完成既定任务后,其可以停泊待命或搭载获取到的数据返航,既提高了任务效率,又增加了任务的成功率。因此,开发高性能水-空跨介质航行器具有重要的军事价值。
目前,国内、外研究机构针对跨介质航行器的研究成果已有很多。国内方面,北京航空航天大学研制的水空两栖飞行器“飞鱼”,可用于协助潜艇完成侦察和攻击任务[2];西北工业大学研究了两栖跨介质飞行器的滑跳弹道特点,并建立了水空滑跳动力学模型[3-6];南昌航空大学研制了一种潜水飞机,可通过2 次变体完成飞行模式和潜水模式的转换[7-8];北京航空航天大学提出一种潜水无人机的概念结构设计方案,所研制的潜水无人机采用中空机翼设计,可通过注、排水调节其平均密度,实现下潜和上浮[9];中科院自动化研究所从控制角度对无人水上飞机的自主起飞展开了研究,考虑到直接利用非线性模型设计控制器的困难,采用T-S 模糊辨识得到的线性差分整合移动平均自回归(autoregressive integrated moving average,ARIMA)模型来表征无人水上飞机在不同运动阶段的动态特性,为了实现对期望俯仰角的跟踪,提出了基于线性模型的广义预测控制[10];上海交通大学在2019~2022 年间先后研制了4 代多旋翼水空跨介质飞行器[11-14],该系列飞行器靠旋翼和螺旋桨提供动力,通过调整旋翼和螺旋桨的转速实现空中和水下运动。
国外方面,密歇根大学研制了“Flying Fish”飞行器,并对其结构、航电和导航系统等方面进行了研究[15-17];美国哈佛大研制了RoboBee 微型机器人,并利用电解水的方式实现了水空跨域[18];麻省理工学院开发了一款仿飞鱼机器人样机,对其机构设计和控制方式进行了研究[19];英国布里斯托大学开发了一种以仿生扑翼为推动工具的潜水无人机,最终实现了水空跨域[20-21];帝国理工学院开发了一种仿鱿鱼水-空跨介质航行器模型,先后在航行器使用喷气装置、固体炸药装置完成了从水中到空中的跨跃[22-23]。
与国外相比,我国在水-空跨介质航行器的概念设计、样机结构设计、结构轻量化设计及介质转换方式等方面还有待进一步强化。基于此,文中开发了一种新型仿“飞鱼”结构的水-空跨介质航行器,其仿生结构设计见图1。通过加装变体水翼和折叠空翼2 套机构,保证该航行器实现水下定深潜行,水面高速航行以及空中定高飞行。
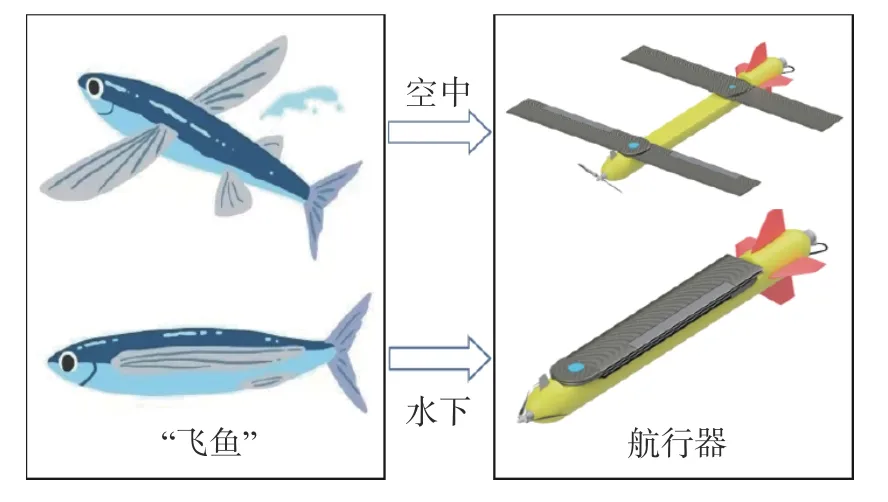
图1 水-空跨介质航行器仿生结构设计图Fig.1 Bionics design diagrams of water-air cross-domain vehicles
1 主体结构布局
如图2 所示,水-空跨介质航行器整体分为艇体(艏部模块、主控模块、动力能源模块、航向操控模块和喷水推进模块)、水翼和空翼。艏部模块前方装有可折叠的推进螺旋桨;主控模块由载体的舱体外壳、光纤惯导、主控制器深度计、入水传感器、频闪灯及水下天线构成;能源模块为整个跨介质航行器供电,内置电池管理单元,可实时监测电池组状态;航向操控模块由干舱与湿舱两部分组成,湿舱与喷水推进器相互连接,组成闭合实体;喷水推进模块选用喷水推进器,其输入电压为48~56 V,当控制油门为80%时,其推力可达440~550 N;此外,在外部加装了稳定翼结构。

图2 水-空跨介质航行器整体布局Fig.2 Overall layout of a water-air cross-domain vehicle
1.1 变体水翼机构
1.1.1 水翼设计
为保证航行器在水面模态下高速航行,拟在跨介质航行器主体前后部两侧分别安装2 组不同尺寸的对称水翼,水翼安装部位对齐且位于航行器艇体的中边缘,如图2 蓝色箭头所示。前后水翼包括平翼、斜翼和支架三部分。整体方案要求水翼在2°~5°攻角范围内有较大的升力系数和升阻比,考虑选取AG24 翼型。对比发现,该翼型不仅具有较高升力系数和升阻比,而且其最大相对厚度最大,可以兼顾水动力性能和强度要求,如图3 所示。

图3 AG24 翼型曲线Fig.3 Airfoil curve of AG24
水翼弦长为

式中:W为总排水量;v为目标滑跑速度;Cl为翼型升力系数;l为单个斜翼在水下的长度;θ为平翼和斜翼的夹角。
根据计算流体动力学(computational fluid dynamics,CFD)的计算结果,选取水翼弦长为40 mm。航行器工作时主要由斜翼提供升力,结合航行器预估的总排水量以及目标滑跑速度,由式(1)可以计算出水翼斜翼的展长尺寸。此外,为保证喷水推进时吸水口有足够的水下深度,将前、后翼的斜翼设计为不同的长度,使得航行器在水面巡航时保持尾倾姿态。其中,前水翼平翼长度205 mm,斜翼长度177 mm;后水翼平翼长度115 mm,斜翼长度100 m。
1.1.2 水翼变体机构设计
水翼的收缩运动由2 个对称的曲柄滑块机构控制,如图4(a)所示,可以实现水翼在90°内的收缩,其收缩过程如图4(b)、(c)所示。推杆由伺服电机驱动蜗轮蜗杆减速器实现往复运动,同时蜗轮蜗杆机构还具备自锁功能,实现水翼在收缩过程中达到指定工作位置后的固定。水翼斜翼的收缩是由曲柄滑块机构控制,如图4(d)所示,当滑块向本体侧移动时,斜翼闭合;当滑块向远离本体侧移动时,斜翼张开。
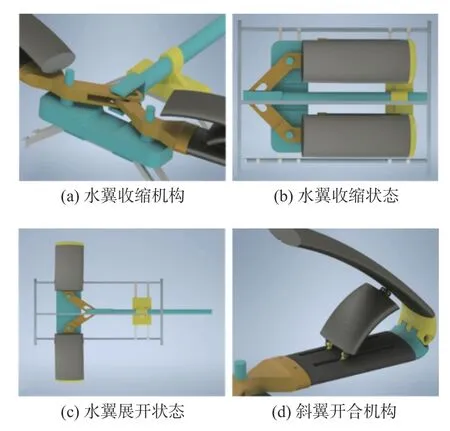
图4 水翼变体机构设计原理图Fig.4 Schematic diagram of hydrofoil variant mechanism
1.2 折叠空翼机构
1.2.1 空翼设计
为保证航行器具有定高飞行的能力,研制并安装了2 对空翼。图5 是空翼和螺旋桨处于展开状态的模型图,此时为了减阻,将水翼收缩。
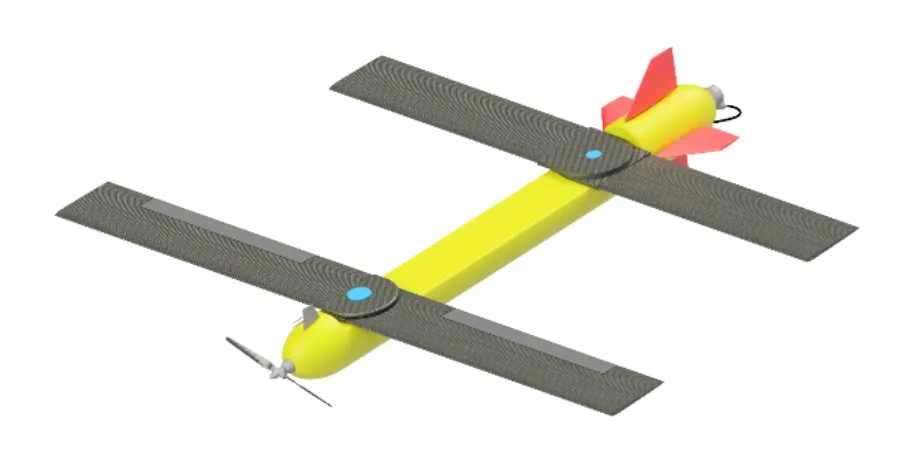
图5 空翼及螺旋桨展开状态示意图Fig.5 Expansion state of air wings and propellers
文中拟采用大展弦比的翼布局形式,初步选择245 N/m2的翼载荷。根据翼载荷及航行器的最大起飞重量,计算需用机翼面积

式中:G为航向器的总质量;µ为翼载荷。
航行器前飞速度为25 m/s,马赫数为0.07,属于典型的低速飞机,因而空翼翼型应选用低速翼型,文中项目选择NACA2412 翼型。
根据空翼展弦比和空翼面积,可计算得到每一排空翼的展长和翼型弦长参数。结合翼折叠机构的布局细节,最终确定翼型弦长0.25 m,前排翼的展长2.2 m,后面翼的展长1.9 m。为满足巡航阶段的升力需求,结合翼型的升力系数与其攻角的关系,对空翼选择适当的安装角为7°,此时翼型的升力系数为0.85。左右空翼后缘中部设置副翼,用于滚转姿态控制及起飞爬升增升。
1.2.2 空翼折叠机构设计
水-空跨介质航行器需要同时具备空中和水下的航行特性,以实现高速航行。在空中飞行时,机翼处于展开状态,为航行器提供飞行升力。水下航行时,机翼折叠于机身本体上部,可减小水下航行阻力,提升水下航行速度,增加航行器的水下续航能力。空翼折叠机构设计方案如图6 所示。

图6 空翼折叠机构设计方案Fig.6 Schematic diagram of air wings folding mechanism
空翼折叠机构采用共轴反向双齿轮盘设计方案,类似于共轴式双桨直升机的螺旋桨设计结构。前后2 对机翼的折叠机构分别由独立的电机进行驱动,驱动电机驱动锥齿轮转动,并带动2 个机翼旋转轴的齿轮盘进行反向转动,进而实现机翼的展开和折叠。齿轮盘上带有限位结构,在机翼达到设定的展开或折叠角度后,齿轮被限位,完成机翼的展开或折叠运动。
2 仿真与分析
利用商业软件Star CCM+得到水-空航行器的水动力性能和气动性能,验证了方案的可行性。水下/水面模态进行单相计算,水面模态进行多相计算。计算中湍流模型采用realizablek-ε模型,壁面采用混合壁面函数,壁面y+小于10。
采用不可压缩流体的雷诺平均计算方法,水面模态多相流计算中的控制方程为

2.1 水下模态
航行器在水下时的状态如图7 所示,此时水翼、空翼和螺旋桨均处于收缩状态。
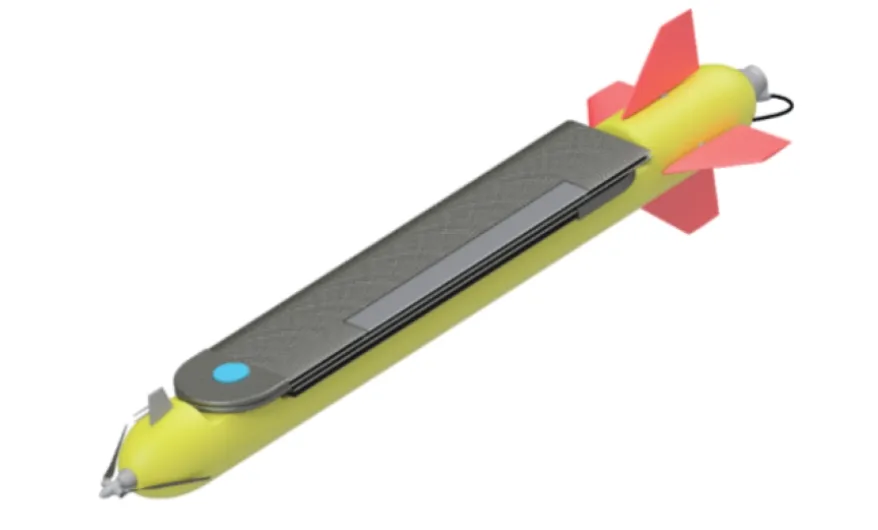
图7 空翼及螺旋桨折叠状态概念模型Fig.7 Conceptual model of air wings and propellers in folding state
图8 为航行器以5 kn 速度在水下航行时的阻力曲线。可以看出,速度为5 kn 时,水下航行器的总阻力约为30 N,其中压差阻力占比较大,摩擦阻力占比较小,分别约为13 N 和17 N。水下航行阻力小于推力,满足推进要求。
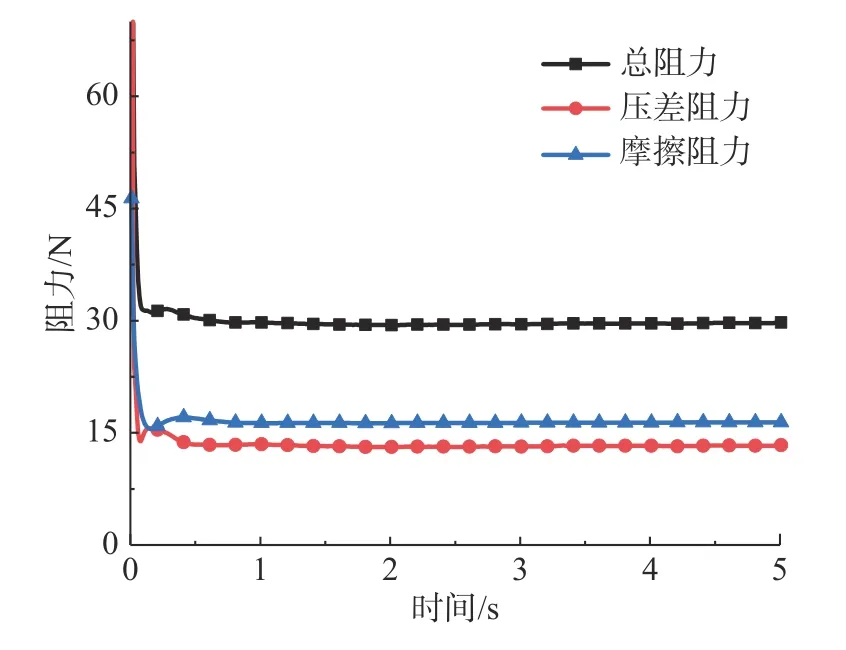
图8 航行器以5 kn 速度水下航行时的阻力曲线Fig.8 Drag force curves of the vehicle when running underwater at the speed of 5 kn
图9 为航行器水下航行时的表面总压力云图。在航行过程中,航行器艏部会形成流场驻点,此处流场中流体局部速度为零,因此会形成局部高压区。航行器中间部分无明显压差,证明其流线型较好、阻力较小。图10 流线图显示,航行器艇身的流线型较好,其产生的阻力以摩擦阻力为主。
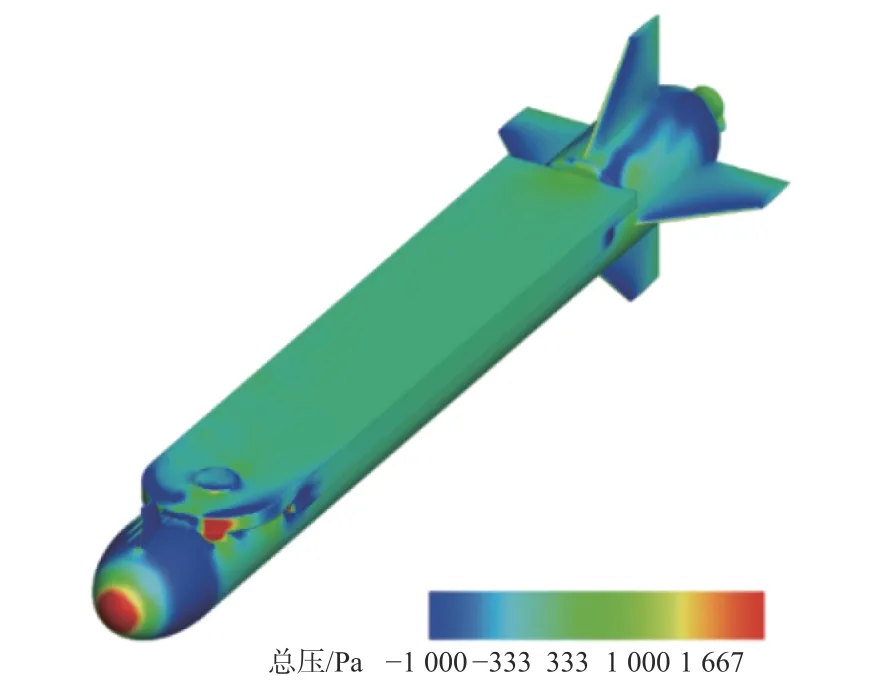
图9 水下航行时航行器表面总压Fig.9 The total pressure on the surface of the vehicle when running underwater
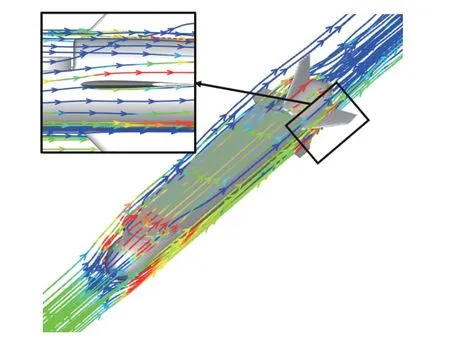
图10 航行器艇体附近流线Fig.10 Streamlines near the vehicle
2.2 水面模态
航行器在水面巡航的状态如图11 所示,此时水翼呈展开状态,空翼呈折叠状态。图11(a)分别为航行器在10,15,20 和40 kn 时的阻力曲线,可以看出,阻力随航行器速度增大而增大,40 kn 时最大阻力约为360 N,该阻力小于喷水推进的推力,满足设计需求。图11(b)分别绘制了航行器总机的升阻比曲线,可以看出,航行器稳定航行后,整个航行器的升阻比会随航速增大而减小。
2.3 空中模态
航行器在空中模态下的计算结果如图12 所示,总升力258 N,满足巡航速度25 m/s、总质量25 kg的要求;总阻力32 N,小于螺旋桨巡航时50 N 牵引力的设计。
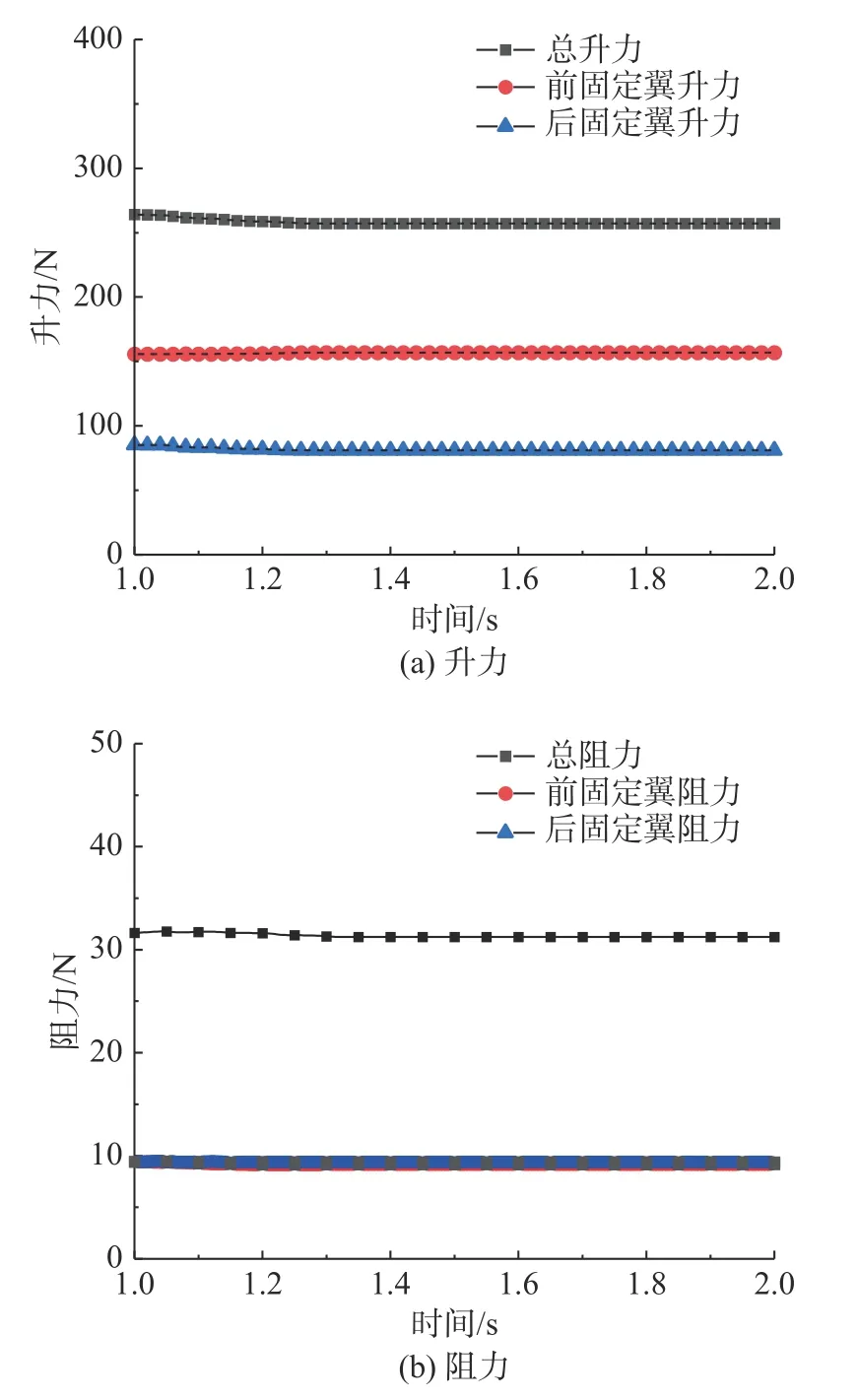
图12 水-空跨介质航行器空中飞行时升阻力变化曲线Fig.12 Lift force and drag force curves of the water-air cross-domain vehicle during air flight
图13 可对航行器气动部件之间的耦合效应进行定性分析。一方面,从图中可以观察到翼根部折叠机构对流场的影响,另一方面,在航行器的串列翼布局中,前翼略高于后翼,这样能够减缓前翼流场对后翼的影响。图14 绘制了翼梢周围的流线,图中(a)处显示流线均匀地流过翼面,说明空翼能够保持良好的气动特性;图中(b)处可明显观察到前缘驻点上方气体从上表面流过,下方气体从下表面流过。由于翼型上下表面长度不同,因而导致流体在上下表面的流速不同,从而产生升力。
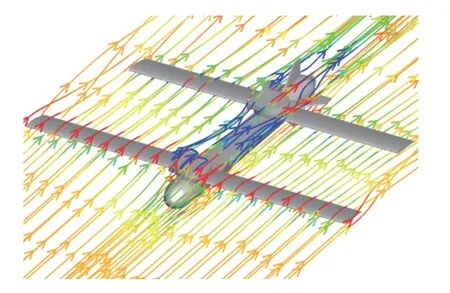
图13 航行器空中飞行时附近流线Fig.13 Streamlines of vehicle during air flight
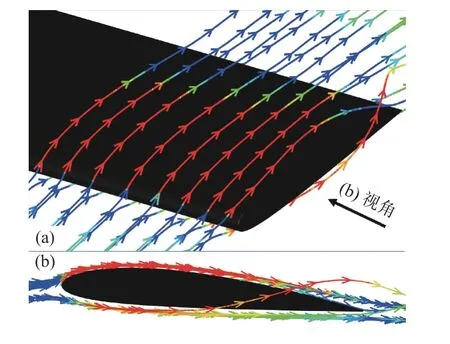
图14 翼梢周围流线Fig.14 Streamlines near the wingtips
3 结束语
文中设计了一种新型仿生水-空跨介质航行器结构,解决了水-空跨介质航行器在布局设计、轻量化设计、介质转换方式等方面存在的问题,对未来跨介质航行器的研究具有一定的指导意义。由于该跨介质航行器的鲁棒性中还未得到检验,未来还需从工程样机角度对该方案展开论证。
猜你喜欢
海洋技术学报(2021年3期)2021-08-19
疯狂英语·新读写(2021年6期)2021-08-05
数字海洋与水下攻防(2020年5期)2021-01-04
装备制造技术(2020年1期)2020-12-25
空间科学学报(2020年4期)2020-04-22
舰船科学技术(2019年4期)2019-05-16
中学生英语(2017年6期)2017-07-31
青年歌声(2017年6期)2017-03-13
北京航空航天大学学报(2016年3期)2016-02-27
噪声与振动控制(2015年4期)2015-01-01
