
反UUV 探测声呐系统发展综述
2023-01-27 05:45兰同宇刘本奇
水下无人系统学报 2022年6期
兰同宇,刘本奇,刘 亮
(上海船舶电子设备研究所,上海,201108)
0 引言
随着无人水下航行器(unmanned undersea vehicle,UUV)、蛙人作战装备等水下装备的快速发展和世界恐怖主义威胁的日趋严重,对沿海军事设施和关键基础设施的水下威胁问题已经得到了越来越广泛的关注。UUV 能够快速、隐蔽地抵近港口、船只等设施,执行情报侦察、水下监视和反潜作战等多种任务[1],其可以在水下停留较长时间,可在深海操作,它的出现彻底改变了水下作业模式;相比蛙人作战装备,UUV 不用顾及潜水员的安全,维护成本也要小得多。可以预见,UUV 将承担更多的特种作战任务,也将给水下安保防御工作带来极大的困难。
美国海军很早就意识到反UUV 问题的重要性。2015 年,美国核武器安全战略系统提出《港口环境下无人水下航行器的探测与分类》需求,提出反UUV 探测声呐探测距离应大于1 000 m,最多可以容忍一天一次的虚警[2-3]。我国也意识到对小型UUV 等新型水下威胁的探测是港口和船只等防御的重中之重[4]。文中从UUV 的特征、典型反UUV 探测声呐系统、UUV 探测的关键技术、主要问题和发展方向等几个方面简要分析了反UUV探测声呐系统的研究现状。
1 UUV 主要特征
1.1 水下声辐射特征
UUV 水下航行时,其辐射噪声分为机械噪声、螺旋桨噪声和水动力噪声。UUV 的辐射噪声与UUV 种类、速度和水深等因素有关。UUV 低速行驶时,主要辐射噪声是机械噪声,集中在低频段;高速行驶时,主要辐射噪声是螺旋桨噪声,集中在中高频段[5]。试验得到,行驶中的UUV 辐射噪声频率范围一般集中在0.5~4 kHz[5-6]。UUV 辐射噪声具有指向性,其首部和尾部辐射噪声级更大,中部相对较小。
以小型UUV Remus 100(见图1)为例,其长度为1.6 m,半球型机头直径为19 cm。试验中测得航行速度为5 kn 的 Remus 100 声源级约为133 dB,最强辐射噪声频率约为1 065 Hz;声源谱级指向性如图2 所示,声源谱级为104.8±8.4 dB[7]。

图1 无人水下航行器Remus 100Fig.1 UUV Remus 100
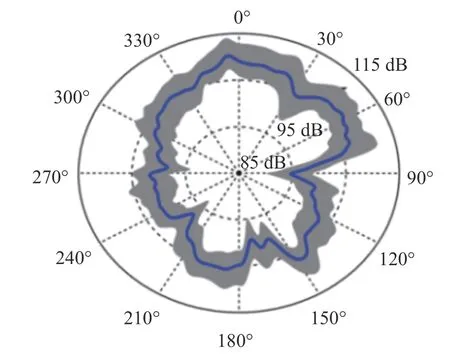
图2 檀香山试验Remus100 辐射声谱级指向性图Fig.2 Directivity diagram of radiation sound spectrum level of Remus100 in Honolulu Harbor test
蛙人、军舰、潜艇的声源级对比分析见表1[8-10]。可以看出,小型UUV 的辐射噪声功率低于开式蛙人、战舰和噪声潜艇,与半闭式蛙人、安静型潜艇大致相当,大于全闭式蛙人。因此被动探测蛙人和安静型潜艇的办法可以应用到UUV 探测中,但同时也面临被动探潜、被动探蛙人的问题与困难。
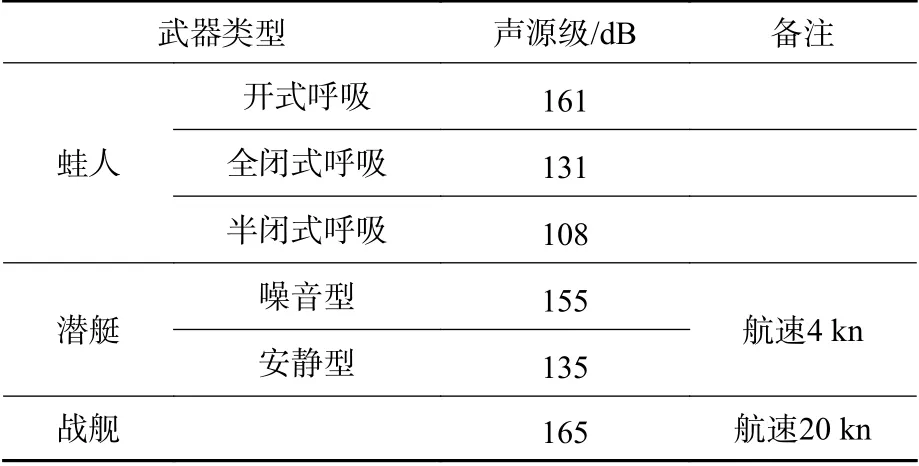
表1 水下武器声源级对比Table 1 Comparison of the sound source levels of underwater weapons
1.2 水下目标强度特征
目标强度是反映目标声反射能力大小的物理量,目标强度与目标体积、信号入射方位、入射信号频率等因素有关。UUV 的几何形状基本上是带有半球体头部的圆柱体,尾部有推进器,其正横方向或头部会有较强的目标强度值,尾部的目标强度一般较小。下面给出刚性圆柱体和刚性球体的目标强度理论值[11]。
刚性圆柱体的目标强度为

式中:a为球(柱)半径;L为柱长;β=klsinθ,θ为入射方向与法线方向夹角。其正横方向的目标强度为

刚性球体的目标强度为

理论分析可得,UUV 身部正横方向的目标强度大于UUV 首部和尾部。UUV 的身部为柱型体,一般柱长越长、柱半径越大,入射方向越接近正横方向,目标强度就越大。此外,圆柱体的目标强度还会随入射信号频率起伏变化[12]。对于UUV 的端部,形状多为半球型,其目标强度理论上只与球半径有关。
以Remus 100 为例,该型UUV 长度为1.60 m,半球型机头直径为19 cm,理论计算得到其端部半球型机头的目标强度为-26 dB,柱型身部正横方向50 kHz 入射信号条件下的目标强度为6 dB。UUV 端部的目标强度较小,与闭式蛙人的目标强度大致相同,身部正横方向的目标强度较大[13]。UUV 的形状与水雷、鱼雷类似,在主动探测上可以借鉴相关方法。
1.3 UUV 探测方式
UUV 探测分为被动和主动声呐探测。被动声呐通过接收UUV 的辐射噪声进行探测,其能耗低、隐蔽性强,可用于长时间水下监测,但小型UUV 辐射噪声级较低,港口环境复杂,因此目前被动声呐探测距离较短。主动声呐通过接收UUV目标的声反射信号进行探测,小型UUV 尺寸较小,目标强度较低,目前高频主动声呐是各国探测小型UUV 的主要装备,探测距离可达1 km 以上。
此外,UUV 的航行速度可达4~10 kn,其运动轨迹由计算机导航,一般按照规划路径运动,轨迹更为平滑。与蛙人等水下小目标相比,UUV 的航行速度更快,运动轨迹更规律,这些特征给UUV的探测和识别提供了一些新的思路。
2 国外反UUV 探测声呐系统发展概况
现阶段各国对UUV 的探测主要依靠蛙人探测声呐系统(diver detection sonar,DDS)和海岸监测声呐[14-15]。下面介绍国外几种典型的UUV 声呐探测系统。
2.1 AN/WQX-2 声呐
美国目前正在开展利用AN/WQX-2 蛙人探测声呐进行UUV 的探测工作,如图3 所示[16]。AN/WQX-2 蛙人探测声呐由加拿大 Kongsberg Mesotech 公司、德克萨斯大学奥斯汀分校共同研发生产,1996 年开始装备,并不断进行技术升级。如今,AN/WQX-2 安装了新一代声呐头DDS 9000/9001 与Defender II 自动探测跟踪软件[4],系统装置如图4 所示。DDS 9000 港口防御声呐由Kongsberg Mesotech 公司于2007 年推出,工作频率为90 kHz,水平探测范围角度为200°,质量小于90 kg,2010 年引进宽带信号处理技术。系统可单独使用也可组网使用,具有广阔的声呐覆盖范围,可以探测蛙人、UUV、蛙人运载工具(swimmer delivery vehicle,SDV)、蛙人推进器(dive propulsion vehicle,DPV)和潜艇等目标,最大探测距离为1 000 m,具体取决于水的温度和盐度。DDS 9001 提供360°全覆盖,增加了移动中的运动补偿,采用多种发射脉冲类型,具有更大的脉宽和带宽,提高了发射声源级和接收采样率,同时质量更轻。Defender II 软件可有效探测目标,然后将其位置转换为GPS 方位,上传至数据链系统;内置目标识别系统,能够将UUV、蛙人的回波同海洋哺乳动物、碎片和气泡的回波区分开。DefenderII 处理系统具有很低的虚警率,其在检测过程中采用了2 种不同的软件程序。声呐处理软件控制声呐头并处理返回的数据,自动检测和跟踪软件利用这些数据来检测、跟踪和分类潜在的威胁。软件内置的算法融合了人工智能的元素,只选择那些具有威胁特征的目标。目标轨迹数据可以输入到DefenderX 软件中,该软件具有融合多达10 个系统数据的能力,能够模拟、回放威胁目标轨迹,以供训练使用。除了目标的自动检测和跟踪,软件能够以标准军事格式显示输出,以便快速操作。一旦探测到目标,操作人员会收到警报以及关于目标的附加信息。
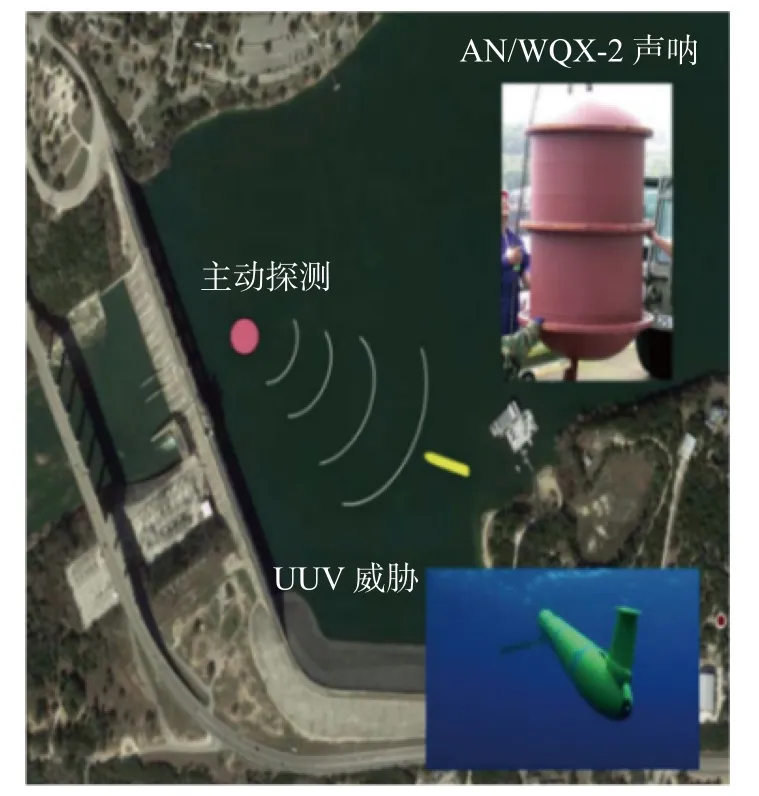
图3 AN/WQX-2 声呐自动跟踪和分类UUVFig.3 Automated tracking and classification of UUVs utilizing AN/WQX-2
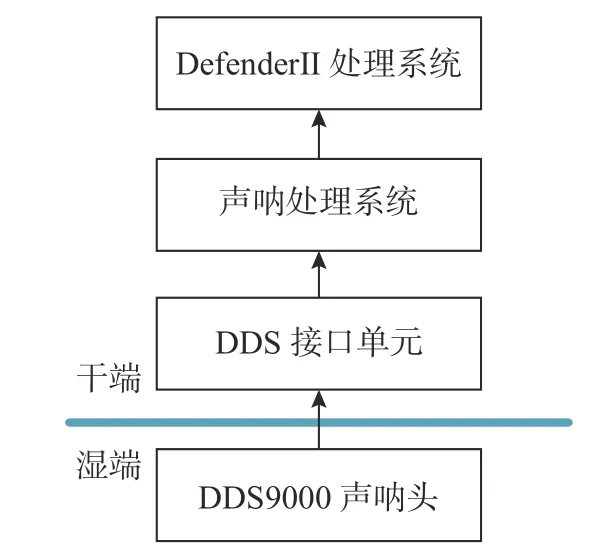
图4 DDS 9000 与Defender II 自动探测跟踪软件示意图Fig.4 Schematic diagram of DDS 9000 and Defender II automated detection and tracking software
Kongsberg Mesotech 公司于2010 年推出了Defender III 软件系统。Defender III 软件基于LINUX 操作系统,该系统提供了一个安全、低维护、可靠、可预测和可复制的环境。Defender III还具备了更高水平的操作员支持和分析能力。分析系统包括数据分析、系统状态分析和声呐性能分析。数据分析可以更详细地检查个别跟踪数据,以帮助确认或消除潜在的威胁目标;系统状态分析可报告系统不同部分的总体情况和细节;声呐性能分析通过对当前不同环境条件下的声呐性能进行建模,使操作人员能够根据环境变化最大限度地提高声呐探测能力。
2.2 “海盾”系统
以色列DSIT 公司研发的“海盾”(SeaShield)静态主动声呐系统是世界上最先进的远程海底海岸监视系统之一,该声呐系统如图5 所示[17]。系统安装在关键海岸线、海上边界和港口入口处,具有水下远程、实时海岸监视能力,可提供对水下领域的全面态势感知。
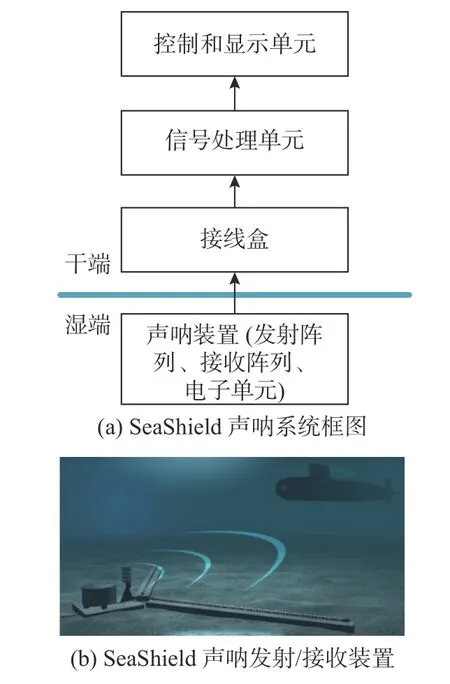
图5 SeaShield 远程沿海监视声呐系统Fig.5 SeaShield long range underwater coastal surveillance system
SeaShield 由1 个主动发射阵列、2 个长接收阵列和1 个安装在海床上的电子单元组成。几个SeaShield 水下装置可以串联放置,形成大型反潜静态主动声呐海岸监视系统。SeaShield 的功能包括水下威胁目标的自动检测、跟踪和分类,可区分潜艇、UUV 和其他水下威胁,并在检测到水下入侵者时立即发出警报。SeaShield 是一个全天工作的固定系统,可在任何天气和海况下可靠运行。系统由陆地站控制,通过参与保护海道、海岸线和港口的反潜战任务,最大限度地提高海军的海岸防御能力。
2.3 DSIT DDS 系统
DSIT 公司研发了3 型知名的DDS,分别为“水盾”(AquaShield)DDS、“尖盾”(PointShield)便携式DDS 和“骑士盾”(knightShield)DDS。2018 年5 月,“Stiletto 海洋演示项目”邀请DSIT Solutions公司在美国某海军基地演示其水下防御系统,主要演示反UUV 能力。演示过程中,DSIT 公司在美国海军基地附近码头部署了AquaShield DDS和PointShield DDS。演示期间,使用多种类型的UUV 从不同角度和深度靠近DDS,在为期4 天的演示中,DDS 系统成功对水下环境进行了监测,并在UUV 进入防护区时进行了有效预警[18]。
2.3.1 AquaShield DDS
AquaShield 是一种高性能DDS 系统,为海军基地、港口等高价值岸基设备和关键近海设施提供持久的水下保护,水下单元如图6 所示。
AquaShield 系统于2006 年面世,适合宽广水域的水下目标长距离探测,可识别闭式、开式呼吸蛙人和UUV。其声呐采用模块化设计,可单独或组合使用。声呐采用主动工作方式,工作频率为60 kHz,脉宽为1~40 ms,在水平方向上提供120°,240°和360°覆盖范围,测向精度小于 0.1°。每套声呐的发射基阵由4 个90°扇面的垂直线列阵组成(长0.4 m),接收基阵由4 个水平线列阵十字形交叉组成(长1.25 m,每2 组阵列背向布置)。Aquashield 的探测距离至少为700 m,以提供15 min 的反应时间用来阻止蛙人入侵或提供5 min 的反应时间来阻止UUV 入侵。AquaShield使用相对较低的工作频率和相对较大尺寸的阵列,并且运用了先进的信号处理算法用于自动探测、跟踪和分类,信号处理模块包括性能优化、相干能量检测、方位插补、恒虚警处理、二维归一化、自动检测、自动跟踪分类、降虚警、自动警报、自动消除唤醒和静态目标抑制等。先进的信号处理算法确保了高检测概率和低虚警率,其在剧烈的噪声和混响背景下具有一周一次的虚警率。2014 年6 月,为应对SDV、DPV 和UUV 相关技术的进步,DSIT 推出了AquaShield 的扩展系统AquaShield ER (AquaShield extended range)。AquaShield ER 提供了前所未有的探测距离,对蛙人运载器的探测距离达3 500 m,开式蛙人的探测距离达1 800 m,闭式蛙人的探测距离达1 200 m。
2.3.2 PointShield DDS
为满足特定地理位置的保护需求,DSIT 公司于2007 年推出了PointShield DDS,其水下单元如图7 所示。该声呐小巧易携,可随船携带、快速安装部署,也可固定安装于海底和港口,适合狭窄水域进行水下目标中短距离高精度探测。该声呐实现了探测到跟踪识别的全自动化,采用模块化设计,可单机运行或组合使用。该声呐采用主动工作方式,工作频率70 kHz,带宽20 kHz,测向精度小于 0.4°,对蛙人的探测距离大于500 m,也可用来探测UUV。
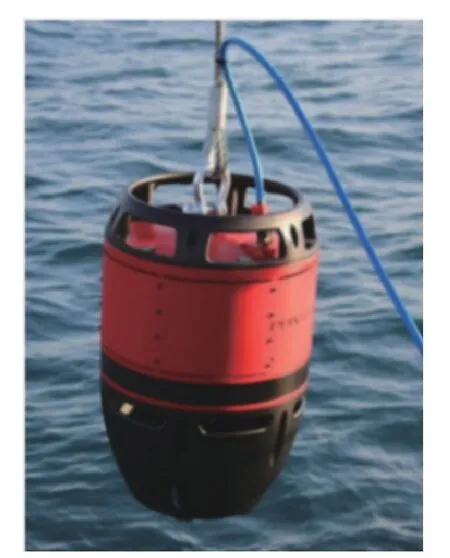
图7 “尖盾”便携式 DDSFig.7 PointShield Portable DDS
2.3.3 KnightShield DDS
2022 年6 月,DSIT 公司在鹿特丹举行的2022年欧洲防务展上推出了KnightShield 机动特遣部队水下安全系统。KnightShield 可保护停泊在港口的船只以及港口的指定区域,其水下工作示意图如图8 所示。该声呐基于PointShield DDS 中的复杂技术,覆盖范围较大,可提供卓越的可靠性和精度。该系统为水下入侵提供全自动检测、跟踪、分类和警报,可检测蛙人、AUV、SDV、DPV 和UUV。在各种天气和海况下可同时处理多达500 个目标。该系统提供威胁目标的精确定位,即使是微弱的目标也能做出精确响应,虚警率极低。Knight-Shield 可装在一个国际标准集装箱中,并可以快速部署和回收移动,与各种传感器以及指挥与控制安全系统集成,适于远征部队部署以及威胁级别升级期间使用。

图8 “骑士盾”DDS 工作示意图Fig.8 KnightShield DDS working diagram
3 难点和问题
目前,国外在UUV 探测方面已经取得了较大的成果,我国也十分重视水下防御相关技术的研究,并取得了很大进展,但还存在一些亟待解决的难点和问题。
1)探测距离问题
近些年UUV 相关技术飞速发展,需要更远的探测距离才能满足响应时间要求。目前声呐系统的探测距离主要受限于发射信号频率、海洋环境、信号处理技术和硬件条件等,远未达到要求。
2)弱目标探测问题
对于被动声呐,UUV 的辐射噪声功率较低,且海洋环境复杂,水下目标种类数量多,目标UUV的辐射信号容易淹没在周边舰船、潜艇、其他水下航行器以及环境噪声等众多干扰信号中,难以有效探测;对于主动声呐,获得高质量的目标回波是主动声呐有效探测的基础,但小型UUV 等水下小目标的体积较小,目标强度很弱,且水下目标数量多,同时大多数港口附近海域水质较为混浊,混响较强,回波信混比极低,目标很容易淹没在混响中,造成漏报和虚警,如何有效抑制混响是主动声呐弱目标探测的关键问题之一。
3)虚警率问题
目前DDS 声呐的虚警率较高,给相关人员带来了巨大压力。除了海洋背景干扰等因素,不能有效识别目标是高虚警的主要原因。声呐系统应具备有效区分UUV、蛙人和海洋生物,判断威胁目标意图的能力,从而降低虚警率,提高工作效率。
4)环境适应性问题
海洋环境复杂多变,大部分声呐在恶劣环境下的使用效果欠佳,因此需要加强声呐系统对环境变化的自适应能力。
为有效解决上述问题,需要对声呐系统、先进信号处理技术等方面进行进一步优化和改善。
4 关键技术和发展方向
4.1 多声呐联合系统
多声呐系统联合工作能够有效增强目标探测的指向性,提升检测准确性,提高探测距离,扩大覆盖范围。多声呐联合系统的思想为多输入和多输出的声呐系统,因此在广义上都可归为多输入多输出(multiple-input multiple-output,MIMO)声呐。MIMO 声呐根据布阵可分为密集式和分布式。密集式MIMO 声呐通过发射正交波形和匹配滤波处理获得波形分集增益,可以增加接收段自由度、扩大单次探测覆盖范围。分布式MIMO 声呐是为了解决传统声呐易暴露且有探测盲区的缺点而设计的。水下探测时,分布式MIMO 声呐可以获得目标在不同方向和距离上的散射信号,从而提高探测性能。分布式MIMO 声呐与多基地声呐思想基本相同,区别在于多基地声呐各工作站是相互独立的,并将处理结果送往中心工作站;MIMO 声呐则是采用联合发射和联合接收处理的工作方式[19]。文中将MIMO 声呐、多基地声呐等多发多收思想的声呐系统统称为多声呐联合系统。学者们已经对多声呐联合系统进行了研究和试验,并取得一定效果。
美国海军研究证实,最适合DDS 的频率在85~100 kHz 之间[20]。多波束声呐通过一个“ping”信号同时发射多个波束,多波束声呐的工作频率更低,能量更高,覆盖范围更广,探测效率更高。但多波束声呐的分辨率低,对干扰背景下的威胁目标探测能力差。Kongsberg Mesotech 公司提出应用单波束声呐补充多波束声呐,对有限的区域提供高分辨覆盖[21]。单波束的工作原理很像雷达扫描,用一个狭窄的、高强度的波束来提供高分辨率的图像。例如使用频率为675 kHz 的Kongsberg MS1000 联合DDS 9000 可以获得更好的探测和跟踪功能,实现了探测范围和分辨率之间的权衡。
2015 年,Meecham 在美国东北部进行测试,试验部署2 套Sonardyne Sentinel 声呐和1 套BioSonics分裂波束声呐(Split Beam Sonar,SBS),并进行校准[22]。试验目标包括开式和闭式蛙人以及小型UUV,经过多声呐的智能部署和数据智能融合,可准确检测和跟踪目标,有效降低虚警。2018 年,Starmark 公司开发了低成本的硬件技术和多发射系统概念,将声呐的探测范围扩大至远超1 km,满足先进UUV 目标带来的响应时间要求[23]。扩大现有声呐探测范围的方法是Starmark 公司演示的高功率、低压冲击发射机技术。该公司在现有声呐系统的工作距离边缘,部署一组分散的、成本低的冲击发射器,创建了一种具有成本效益的多静态系统。
UUV 的目标强度在不同入射方位差别很大,使用多声呐联合工作理论上可以获得信噪比(信混比)更高的目标回波,因此多声呐联合系统是反UUV 探测声呐系统的重点发展方向,但多声呐联合目前存在的多声呐数据融合问题、多声呐间相互影响和干扰等问题仍然需要科研人员研究和解决。
4.2 被动及主被动联合声呐系统
对于水下小目标监测,主动声呐探测方法受到能源供给、主动发射泄漏的限制,不能满足长时间连续监测的需求;同时,主动声呐可能探测到与蛙人、UUV 目标强度相似的物体,造成虚警;主动声呐还会暴露自己的位置信息,在作战中十分不利。相比主动声呐,被动声呐具有能耗低、低虚警、隐蔽性强的特点。美国Stevens 理工学院研发了SPADES 被动声学水下监视系统,并在哈德逊河和纽约港进行了测试,试验表明该系统具有700 m 内的潜水员探测能力[24]。2010 年,Stevens 理工学院与荷兰TNO 公司使用分别研发的SPADES 和Delphinus System 声呐系统在Den Helder 港进行联合试验,试验将距离为440 m 的潜水员信号显示在频谱图上,并确定了距离为340 m 的潜水员的方位[25-26]。为满足更高的探测需求,英国Sonardyne公司和Stevens 学院建立了合作伙伴关系,以研究一种主被动声呐联合系统,Sonardyne 发射的声脉冲的目标回波可以被SPADES 接收和处理,主被动声呐的融合检测和轨迹融合可有效提高探测距离,降低虚警率。对于UUV 目标,其辐射噪声略大于蛙人,因此应用被动声呐进行探测是可行的。可以预见,随着对UUV 等水下小目标探测需求的提高,被动声呐系统和主被动联合声呐系统也是反UUV 探测声呐系统的重点发展方向之一。
4.3 主动声呐系统发射信号波形设计
目前,UUV 探测工作主要依托于现有的DDS,DDS 最常用的发射信号为线性调频(linear frequency modulation,LFM)信号,LFM 信号拥有良好的距离分辨率和较好的抗混响性能。但LFM 信号速度分辨力低,实际处理中,接收回波经常出现与目标无关的混响干扰,回波信混比很低,易造成虚警和漏报。考虑UUV 的速度高于蛙人目标,学者们尝试利用UUV 的速度信息进行探测,提出了使用多普勒敏感信号来区分目标回波和混响,如利用m 序列编码的二进制相移键控(binary phase shift keying,BPSK)、正弦调频(sinusoidal frequency modulation,SFM)等信号的多普勒敏感特性,通过多普勒处理可实现目标与混响的分离,并利用多普勒图有效对目标和混响进行跟踪[27-28]。在多普勒敏感信号的基础上,又提出了以LFM 为基础,周期性地切断部分脉冲的信号[29]的cutFM 信号。该信号的频谱呈梳状,具有多普勒选择性,可在UUV、蛙人速度范围内有效抑制至少20 dB 的静态混响。近些年,更多组合波形得到了广泛的研究,如正负调频信号、LFM 连续波(LFM continuous wave,LFMCW)组合信号、几何梳状谱信号(geometric comb waveform,GC)等[30-31]。组合信号能够将不同信号的优点结合起来,更加准确和广泛地获得目标信息,有效提高探测性能。此外,正交发射波形、自适应发射波形常常应用到MIMO 声呐系统中,可以获得比单声呐更好的探测、识别和抗干扰性能。
4.4 目标自动检测技术
信号检测算法从本质上一般可分为杂波滤波和目标回波信号累积2 种,或2 种手段同时应用[32]。现有的DDS 及被动探测系统的信号处理方法主要有波束形成、声呐多历程累积、空时背景归一化、基于特征提取的目标探测算法,以及自适应信号处理等[33-37]。高频波束形成是目标有效检测的基础,波束形成技术经过多年发展,已经拥有很多成熟的算法,可初步实现波达方向(direction of arrival,DOA)估计、提高回波信噪比等功能。子空间DOA估计和稀疏类DOA 估计的相继出现使DOA 估计实现了高分辨以及低信噪比下的良好性能[38]。其他目标检测算法一般建立在波束形成的基础上,通过对波束域数据的分析处理进而获得更好的目标检测效果。在实际应用中,海洋环境复杂多变,一些算法不能有效匹配海洋信道,往往很难获得稳定的效果,因此在提高信号检测算法稳定性的同时,还需要发展与水声物理场相匹配的信号处理技术,如匹配场技术、信道特征处理技术等[39]。此外,随着深度学习、大数据等人工智能技术的迅速发展,水声目标探测技术也应借鉴相关技术向智能化转化。
4.5 目标自动跟踪技术
运动目标跟踪的主要任务是选择合适的目标特征并使用搜索算法、特征匹配算法将目标与周围背景进行区分[40-41]。现阶段目标跟踪最为直观的思想就是在下一帧图像中找到与目标图像相似度最大的目标位置,常用的方法有基于数据关联的目标跟踪算法和基于随机有限集(random finite set,RFS)的目标跟踪算法[42-43]。进行数据关联时,常使用卡尔曼滤波进行数据轨迹预测,以提高数据关联的准确性和效率。在多目标跟踪时,数据关联算法的本质是将多目标跟踪转化为单目标跟踪,跟踪效果好但运算量大、实时性差。基于RFS 的目标跟踪算法解决了数据关联跟踪算法实时性不足的问题。该算法将多目标的状态和观测值用集合的形式表示出来,通过贝叶斯滤波估计多目标运动状态,避免了数据关联的繁琐计算[44-45]。常见的RFS 目标跟踪算法有概率假设密度(probability hypothesis density,PHD)算法、多伯努利(multi-Bernoulli,MB)滤波算法等。跟踪准确性和实时性是多目标跟踪的重点,如何结合多种算法的优势,提高跟踪性能仍然是目前亟待解决的问题。
4.6 目标识别技术
目标识别技术是指在得到声呐图像之后,通过目标特征提取,然后将其与数据库中的特征数据对比,进而实现目标分类识别。无论主被动声呐,都可以通过对比潜艇、UUV、蛙人以及海洋生物运动学特征(速度、跟踪时间、轨迹等)的不同进行分类识别,这也是目前水下小目标识别最常用的方法[46]。如小型UUV 的运动轨迹为计算机导航,与蛙人和海洋生物的运动轨迹有明显区别。对于主动声呐系统,可通过材料特征和几何尺寸特征进行目标的分类识别,材料特征和尺寸特征都可通过对目标回波的分析得到。对于被动声呐系统,主要通过机械噪声、螺旋桨噪声的谱参数特征(Burg 谱、Lofar 谱、倒谱、Demon 谱等)进行目标分类识别。实际应用中,现有方法的目标识别效果并不十分理想,主要存在目标特征提取精度欠佳、水下目标特征交叉难以分类、有效数据稀少等问题。因此,优化目标检测、跟踪算法以获得更准确的目标特征信息是目标有效识别的基础和关键;同时建设水声数据库,提升水声目标数据信息支持能力也是目前亟待解决的问题[47]。此外,可尝试融合不同类型的水下特征进行目标分类,并将深度学习思想引入到水下目标分类识别算法中,提高目前算法分类能力和对复杂水下环境的适应能力。
5 结束语
UUV 作为一种新型的海上力量,可完成水雷战、反潜战、目标侦察监视、关键设施破坏等特种作战任务,给安保防御工作带来了巨大的威胁和挑战。文中综述了国外利用现有声呐系统进行UUV 探测的研究现状以及反UUV 探测声呐的关键技术、主要问题和发展方向。
国外相关机构已针对反UUV 探测声呐系统进行了大量的研究和试验,并获得了较多成果,国内针对反UUV 探测声呐系统的研究起步较晚,虽取得了一些进展但仍然存在许多亟待解决的问题。我们应该借鉴欧美先进国家的研究经验,积极开展反UUV 探测声呐相关研究工作,突破关键技术、解决相关问题,开发出适用于我国海洋环境的高性能反UUV 探测声呐系统。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
小哥白尼(军事科学)(2022年5期)2022-08-17
海洋信息技术与应用(2020年3期)2020-08-24
小哥白尼(军事科学)(2019年9期)2019-12-21
小学科学(学生版)(2019年10期)2019-11-16
劳动保护(2019年3期)2019-05-16
噪声与振动控制(2015年4期)2015-01-01
振动、测试与诊断(2014年4期)2014-03-01
现代电子技术(2009年13期)2009-08-31
