
国外水面/水下两用艇水动力设计启示
2023-01-27 05:45杨壮滔邵永勇
水下无人系统学报 2022年6期
朱 敏,张 镇,杨壮滔,邵永勇
(中国船舶集团公司第705 研究所 昆明分部,云南 昆明,650101)
0 引言
始建于第2 次世界大战的特种作战部队,以卓越的战绩,充分显示了特种作战所具有的兵力投入小、战果丰硕、影响力显著等特色。目前,特种部队担负着重要的战略使命,已发展为具有海、陆、空及水下三栖作战能力的重要作战力量[1-3]。相对于常规部队来说,特种作战的特殊性以及任务和战场的多样性,要求特种作战部队武器装备品种齐全、形式多样、灵活轻便、技术先进,并易于隐蔽和操纵。特种作战装备按用途可分为潜水装备、运载装备、探测装备、通信装备、导航装备及武器装备[4-5]。其中,蛙人运载装备是蛙人执行特战机动、渗透的重要装备,可有效提升蛙人远程投送、隐蔽渗透等作战能力。
按照航行过程中蛙人在舱内所处的状态,可将蛙人运载装备分为干式和湿式两大类。干式蛙人运载装备蛙人舱内为干态,蛙人可在舱内自由呼吸,有利于蛙人在运载过程中保存体力,提升战斗力[6-9]。湿式蛙人运载装备蛙人舱内为泡水状态,通过潜水装备呼吸,不利于蛙人保持战斗力。相对而言,湿式蛙人运载装备尺度较小,对母平台要求较低,投送距离有限。干式蛙人运载装备可达几十吨,对作战保障系统要求较高,但作战半径更大。
综合考虑蛙人快速远距离投送、危险区隐蔽渗透、驾乘人员舒适性及对母平台要求等多种因素,近年来美、英、俄、瑞典、荷兰等国相继研制了多种水面/水下两用艇。水面/水下两用艇具备水面高速航行和水下隐蔽渗透能力,可搭载于大中型舰艇及运输机灵活布放,显著提升蛙人远距离投送及远海常态化执行多样化任务能力。
水面/水下两用艇水动力设计涉及滑行艇、水下航行器、水面耐波性、水面雷达隐身和水下声隐身等多个细分领域,设计难度大、设计耦合因素多。文中通过梳理国外产品发展现状,分析其水动力设计经验和难题解决途径,可为国内后续开展相关设计提供参考。
1 国外水面/水下两用艇现状
1.1 各国产品介绍
1)美国“多用途作战艇”
应美国特种作战司令部要求,司蒂德公司研发了“多用途作战艇”(multi-role combatant craft,MRCC)(见图1)。该艇为湿式结构,长9.91 m,宽2.31 m,高1.68 m,承载力0.8 t,可搭载8 人。该艇采用水面/水下双模动力,可双向航行。水面状态“尖头”朝前,由增压柴油发动机提供动力,巡航速度30 kn 时续航力为250 n mile,以最大速度35 kn可航行180 n mile;水下状态“钝头”朝前,由电池驱动电机提供动力,能够以5 kn 的速度航行25~30 n mile,最大下潜深度20 m[10]。

图1 美国MRCCFig.1 American MRCC
2)俄罗斯“海神”
“海神”水面/水下蛙人输送艇由俄罗斯天青石设计局设计生产(见图2)。该艇为湿式结构,长约9.9 m,宽2.3 m,高1.68 m,载重0.636 t,可搭载6 名蛙人(含装备)。该艇采用水面/水下双模动力,水面、水下同向航行。水面航速24 kn,最大航程112 n mile;水下航速3 kn,最大航程6 n mile。工作深度20 m[10]。
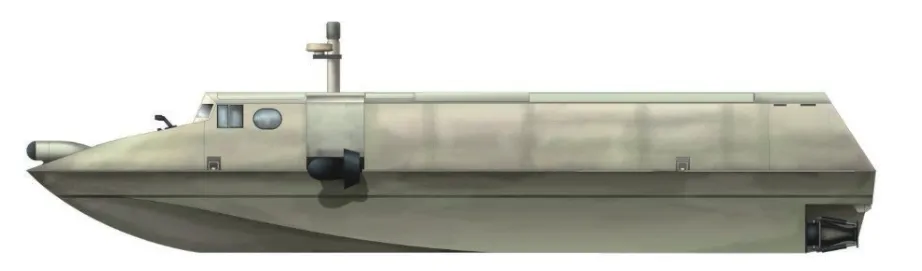
图2 俄罗斯“海神”输送艇Fig.2 Russian “Тритон-НН”
3)瑞典/英国DGB 输送艇
瑞典DCE 公司为英国皇家海军研制的DGB(diver group boat)艇也是一种湿式水面/水下蛙人输送艇,于2011 年底正式交付英国皇家海军特别舟艇部队。该艇为湿式结构,全长10 m,宽2.3 m,高为1.65 m,载重1 t,搭载6 人(见图3)。该艇采用水面/水下双模动力,水面航行时,依靠柴油发动机,最大航速可达30 kn;水面巡航速度25 kn,续航力可达180 n mile;水下潜航速度5 kn,依靠电池为4 个电机提供动力,水下航程15 n mile,工作深度20 m,水面、水下同向航行[10]。

图3 英国DGB 输送艇Fig.3 British DGB
4)英国SEAL Carrier
SEAL Carrier 是英国詹姆斯·费舍尔防务集团在收购瑞典DCE 公司后,在DGB 基础上升级的产品(见图4)。该艇为湿式结构,采用水面/水下双模动力、同向航行形式。总长9.65 m,宽2.21 m,高1.65 m,载重1.2 t,搭载6 人,工作深度40 m。在水面/半潜航行状态,该艇既可以依靠柴油机驱动喷水推进器高速航行,又可以依靠电池驱动水下推进器半潜航行;在水下航行状态时,该艇依靠锂电池系统+双轴推实现水下稳定航行。该艇及其专用拖车可装载于标准集装箱完成运输,其布放形式灵活多样,可由大中型水面舰艇携载布放、快艇拖带或飞机空投,应用范围较广[10]。

图4 英国SEAL CarrierFig.4 British SEAL Carrier
5)荷兰P7
P7 是由荷兰设计的一型水面/水下蛙人输送艇。该艇是由快艇直接改造而来,采用湿式结构,单列乘坐,可搭载6 人,具有水面高速滑行、水面低速航行和水下低速航行3 种模式(见图5)。艇长9.8 m,宽2.5 m,高1.8 m,载重1 t。水面航速30 kn,航程250 n mile;水下5 kn,航程16 n mile。水下工作深度18 m,接近目标后可系留海底。水面采用柴油机与喷水推进,主机运转时可为电池充电;水下由电池为4 个电推提供动力[10]。

图5 荷兰P7Fig.5 Dutch P7
6)韩国SDV-1000W
SDV(special delivery vessel)-1000W 由韩国VOGO 公司设计生产,该艇长13 m,宽2.21 m,高1.65 m,载重1.5 t,可搭载10 人(含装备)(见图6)。该艇为湿式结构,采用水面/水下双模动力、同向航行形式。水面采用柴油机驱动喷水推进器航行,水面航速35 kn,最大航程130 n mile;水下采用纯电推进,水下航速5 kn,最大航程16 n mile,工作深度18 m。后续VOGO 公司又进一步缩小了SDV-1000W 的尺度,以适应集装箱运输和空投的需求[10]。
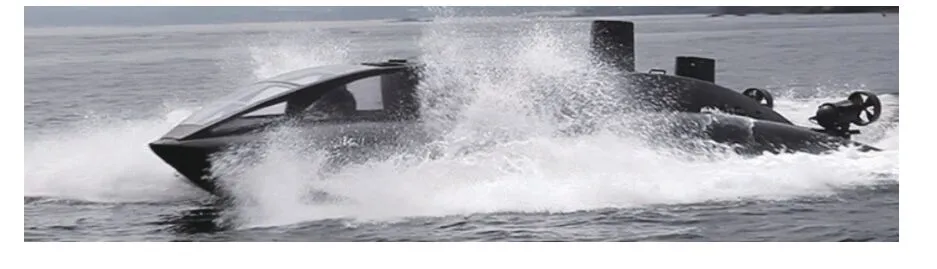
图6 韩国SDV-1000WFig.6 South Korean SDV-1000W
1.2 综合技术状态
表1 对比了国外水面/水下两用艇综合技术指标,分析得出如下特点: 1)外形尺度均在1 个集装箱装载范围内,便于运输;2)均采用混合动力,水面热动力实现高速航行,水下纯电推进实现隐蔽航渡;3)水面航速均约30 kn,水面续航力112~270 n mile;水下渗透速度约5 kn,水下续航力6~25 n mile;4)均为湿式结构,搭载6~10 名蛙人,载重0.6~1.5 t;5)工作深度均在蛙人安全潜深40 m以内。
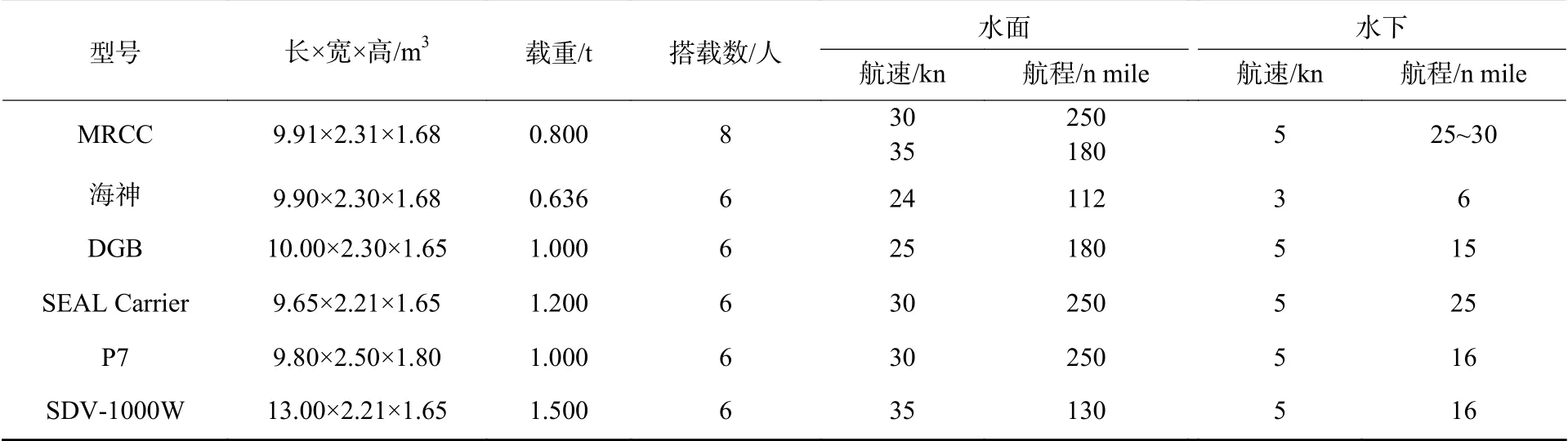
表1 国外水面/水下两用艇性能对比Table 1 Performance comparison of foreign surface/underwater dual-purpose vehicles
综上所述,水面/水下两用艇水面最大航速可达30 kn,综合续航力约200 n mile,具有一定独立投送能力;其次,水面/水下两用艇虽为湿式结构,水面航渡状态可不通过潜水器具呼吸,兼顾干式装备的优点;另外,水面/水下两用艇具备集装箱装载和空投能力,进一步增强了远距离投送能力。
2 水动力特点分析
水面/水下两用艇艇型设计可采用“潜艇出水”或“快艇入水”2 种设计思路。水面/水下两用艇水面航速可达30 kn,其弗劳德数属于典型的滑行艇范畴。一般滑行艇的主要特征是艇体大部分质量是依靠滑行面流体动压力支撑而非艉部浮力,滑行时艇艉吃水很浅,同时要求具有一定滑行面。而潜艇类水下航行器通常采用“水滴形”,艉部呈收缩状,面积不具备支撑滑行要求。另外,滑行艇重心较为靠后,若按潜艇思路设计,重心靠前,则无法满足起滑条件。因此,目前国外水面/水下两用艇都基本采用“快艇入水”的形式,即下半部分采用滑行艇外形以适应水面高速航行;对上半部分进行水下低阻优化,以适应水下稳定控制需求。
从流体外形及布局角度分析,目前国外主流水面/水下两用艇大致可分为3 类: 1)外形如美国的MRCC 和俄罗斯的“海神”,文中定义为类MRCC艇型;2)如瑞典DGB 和英国SEAL Carrier,文中定义为类DGB 艇型;3)如荷兰P7 和韩国SDV-1000W,文中定义为类SDV 艇型。下文将从水面滑行性能、水面耐波性能、雷达隐身、水下航行性能及水下声隐身等方面对每种艇型进行分析。
2.1 类MRCC 艇型
类MRCC 艇的流体外形与布局角度主要有以下特点: 1)下层采用滑行艇底,艏尖艉方保证了较好的水面滑行性能;2)下层采用深V 型艇底,提高了耐波性能,但会降低一部分滑行效率;3)上层也采用艏尖艉方构型,整体包络体容积较大,同时采用一定内倾角,保证水面雷达隐身;4)上下层基本对称,保证水下航行时不会产生额外不平衡力矩。
类MRCC 艇型呈倒水滴形,艏部尖艉部钝。为获得兼顾水面/水下的航行性能,该类艇在航行方式上有其独特性: 美国MRCC 艇在水面航行时采用尖头朝前,这样能保证水面航行时的滑行效率;水下航行时采用钝头朝前,能保证水下低阻及操控的稳定性(见图7)。

图7 MRCC 艇水下推进器及水面滑行实物照片Fig.7 Pictures of underwater thrusters and surface gliding of MRCC
该艇型的缺点是: 1)水面、水下2 个方向航行,需要2 组操控装置,占用空间大;2)水面、水下航行时成员需要调换坐姿,若长时间背向航行容易晕船,舒适性较低,且对乘坐空间要求较大;3)水下推进电机暴露于水中,且支撑结构简单,对水下声隐身性影响较大;4)若水面、水下采用同向航行,如尖艏朝前则会导致水下阻力激增,宽艉带来大的流动分离容易造成航行失稳(见图8 和图9),而钝艉朝前则会导致水面滑行失效。俄罗斯“海神”就是采用水下尖艏朝前航行,其水下最高航速仅为3 kn。
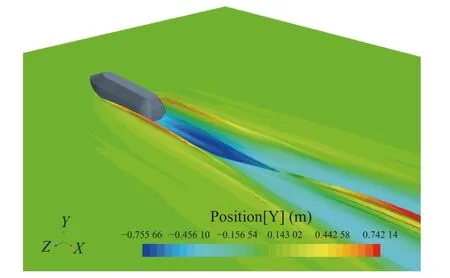
图8 类MRCC 艇模型水面滑行波高仿真云图Fig.8 Contour of gliding on water surface wave height for class MRCC boat model

图9 类MRCC 艇模型水下航行表面压力云图Fig.9 Contour of underwater navigation surface pressure for class MRCC boat model
2.2 类DGB 艇型
类DGB 艇型的外形特点: 1)下层采用滑行艇底,艇底剖面V 度适中,兼顾了耐波性和滑行性能;2)上层艇体水平向内收缩,留出一部分甲板空间,便于蛙人上下艇;3)整体较为纤细,同时上层艇体水平剖面从艏部向艉部呈流线型,水下航行阻力低;4)水线上层采用一定内倾设计,降低雷达反射强度(见图10);5)该艇型水面、水下采用同向航行,降低了操控系统的复杂性。

图10 类DGB 艇水面航行实物照片Fig.10 Pictures of class DGB boat gliding on water surface
类DGB 艇型缺点:
1)水下航行时,上下不对称结构带来垂直面较大的非对称力及力矩,需要较大水平舵面来平衡(见图11);2)整体构型较为纤细,空间利用率不高;3)上层艇体与甲板结合处构成垂直角,水面大倾角航行时容易反射雷达波;4)水下推进电机直接置于水中,不利于声隐身。
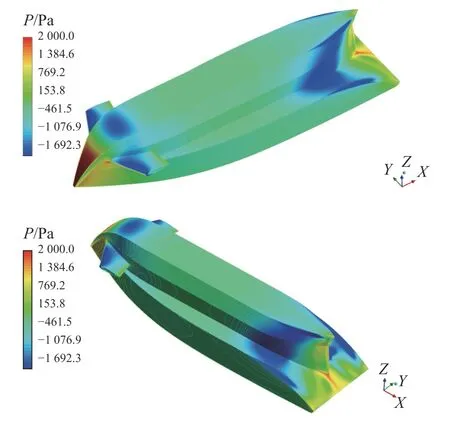
图11 类DGB 艇模型水下航行表面压力云图Fig.11 Contours of underwater navigation surface pressure for class DGB boat model
2.3 类SDV 艇型
类SDV 艇型特点: 1)艇底剖面V 度适中,兼顾耐波性能和滑行性能;2)艏部上层艇体与下层艇体基本对称,水下航行时可抵消艏部不平衡力及力矩;3)艉部上层垂直向下收缩,有利于压力恢复降低水下航行阻力(见图12);4)上层采用内倾设计,有利于雷达隐身;5)该艇型同样采用水面、水下同向航行,操控系统的复杂性降低。

图12 SDV-1000W 改进艇照片Fig.12 Picture of improved version of SDV-1000W
类SDV 艇型缺点: 1)艉部上层艇体垂向收缩,虽然降低了阻力,但过渡段负压区产生较大升力及低头力矩(见图13);2)水下推进电机同样直接置于水中,不利于声隐身;3)整体外形较为“圆润”,缺乏航向稳定性结构或构件,需要较大鳍舵控制面维持航向稳定性。
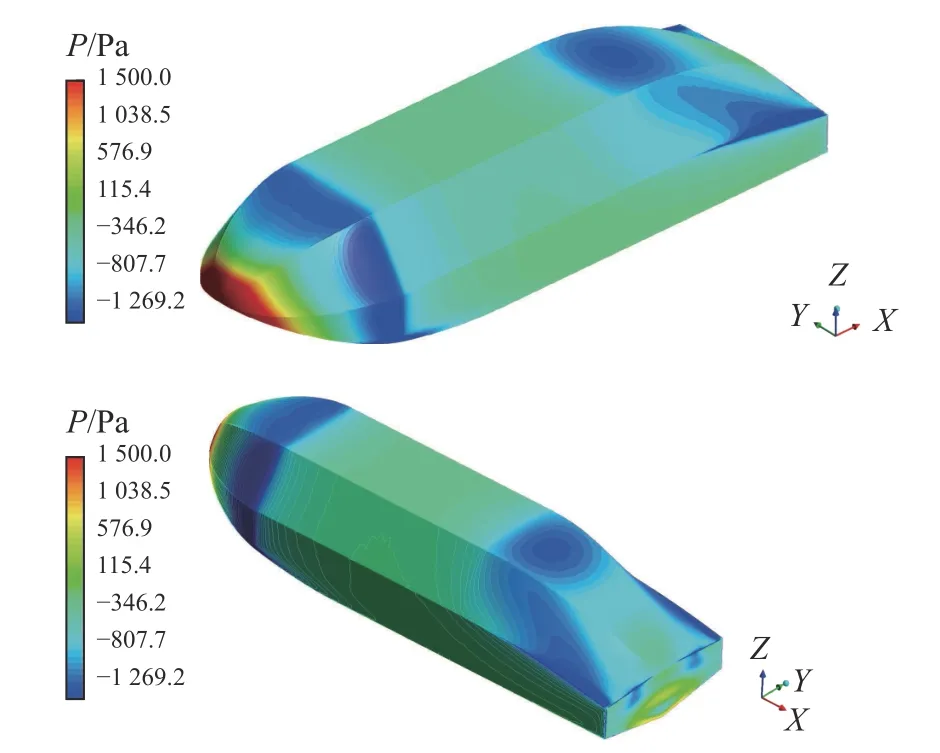
图13 类SDV 艇模型水下航行表面压力云图Fig.13 Contours of underwater navigation surface pressure for class SDV boat model
3 启示建议
水面/水下两用艇具备水面高速航行和水下隐蔽渗透能力,在一定程度上兼顾了干式、湿式蛙人运载装备的优点,是近年来研究的热点。文中通过对国外水面/水下两用艇水动力特点对比分析,获得如下启示,以期为我国后续相关装备研制提供参考。
1)基本设计思路: 克服异构外形水下低速航行稳定性相对容易实现,为保证水面/水下两用艇在水面高速航行,建议采用“快艇出水”设计思路;
2)水面、水下航向设计: 水面、水下异向航行,会带来人员舒适度差、空间利用率低等问题,建议采用水面、水下同向航行方式;
3)动力推进系统: 由于纯电动力能量密度低,无法满足要求,建议采用热/电混合动力推进系统;同时,由于水面、水下阻力系数差距显著,1 套推进器难以兼顾,建议采用2 套推进器,;
4)艇底设计: 建议采用V 度适中滑行艇底,增加破浪能力的同时,兼顾滑行性能;
5)上层艇体设计: 建议考虑与下层融合设计,重点关注水面雷达隐身、空间利用率及水下航行稳定性等因素。
6)水面、水下重心位置匹配设计: 两用艇水面滑行时要求重心较为靠后,水下航行时要求重心与浮心处于同一轴向位置,建议采用对重心位置有较大冗余度的滑行艇底设计,通过水下压载调节来获得水面、水下重心位置的合理匹配;
7)水面、水下外形融合设计: 建议在保证有效滑行面积和结构空间的基础上,重点解决水下减阻和航行操稳性问题。通过增加水滴型艉部收缩,减小水下阻力,增加艏、艉舵,抵消垂直面不平衡力及力矩。另外,还可尝试采用水面水翼+水下回转体水动力外形设计,实现水面高速水翼航行,水下稳定航行;
8)两用艇出、入水主要采用大流量通海阀和压载系统组合调节实现。出、入水过程中会面临稳心高为零的不稳定状态,建议快速完成转化过程,避免发生失稳。
猜你喜欢
水上消防(2022年1期)2022-11-20
青少年科技博览(中学版)(2022年6期)2022-08-31
小哥白尼(军事科学)(2022年5期)2022-08-17
环境卫生工程(2021年4期)2021-10-13
小哥白尼(军事科学)(2019年9期)2019-12-21
建材发展导向(2019年11期)2019-08-24
今日农业(2019年12期)2019-08-15
中国资源综合利用(2016年11期)2016-01-22
浙江大学学报(工学版)(2015年2期)2015-05-30
科学大众·小诺贝尔(2009年12期)2009-07-21
