
国外蛙人水下输送平台技术发展综述
2023-01-27 05:45钟宏伟陈迎亮刘东林张筱芃李楚涵
水下无人系统学报 2022年6期
周 超 ,钟宏伟 ,陈迎亮* ,刘东林 ,丁 盛 ,张筱芃 ,李楚涵
(1.中国人民解放军92228 部队,北京,100072;2.中国船舶集团有限公司 第705 研究所昆明分部,云南 昆明,650101)
0 引言
蛙人(水下特战队员)是指海军陆战队和特种作战部队中配备轻型潜水装具等特种装备遂行两栖作战任务的人员,其能够分散、独立、隐蔽活动,具有灵活精悍、行动诡秘等特点。
蛙人水下作战时需通过水下/水面输送平台秘密将特战队员或物资投送到指定水下区域,以实现隐蔽渗透,破袭对手的目的。因此水下战场信息获取、精确导航定位、爆破打击、水下生命支持及隐蔽运输保障技术能力是蛙人作战系统装备技术的关键,决定着特战队员能否顺利、有效地完成作战任务。
蛙人水下特种装备主要包括具有湿式、干式、水面/水下混合式特性的小型、大型蛙人投送装备,遂行作战使用的引导装备,自卫及破袭的武器装备和维护各作战装备正常运行的保障装备。蛙人水下特种装备技术体系如图1 所示。
图1 蛙人水下输送平台技术体系图Fig.1 Technical system diagram of diver underwater delivery vehicles
文章通过对国外水下蛙人输送平台发展现状进行深入分析,梳理了其技术体系,提出了亟待突破的关键技术及发展趋势,以期为我国蛙人水下作战系统与装备技术的发展提供参考。
1 蛙人水下输送平台发展现状
现有的蛙人水下输送平台按照功能可分为湿式蛙人输送平台、干式蛙人输送艇和水面/水下蛙人输送艇3 类。
1.1 湿式蛙人输送平台
湿式蛙人输送平台是一种可阻挡水流、浸没于水中、具有密闭空间的载人平台,其包括蛙人运载器和蛙人输送艇。各国对此类装备的开发和研制相当重视,不断采用新技术来完善其特有的隐蔽攻击能力,并形成系列化的产品[1]。目前,在水下作战中被广泛采用、具有高可靠性和一定战斗力的湿式蛙人输送平台技术仍具有发展空间,并将在一定时期内起着不可低估的作用。未来,湿式蛙人输送平台技术将向着智能化、模块化、专业化、多样化、群组化和网络化方向发展。
最初的湿式蛙人输送平台通过潜艇鱼雷发射管或舰艇释放,其流体外形主要有鱼雷型(圆柱形)和舰艇型,可搭载2 名及以上特战队员或一定数量的有效载荷。湿式蛙人运载器一般可搭载2~4 人,湿式蛙人输送艇可搭载8~16 人。为减少特战队员在作战航渡期间承受的水流冲击和体能消耗,主要采用湿式密封的设计技术。目前世界主要国家的典型在研产品如下。
1)美国
20 世纪70~80 年代,美国海军实验室基于集成推进电机、电池及导航等技术成果研制出新型湿式蛙人输送艇,以MK 8-0 外形作为后续艇型,航速6 kn、续航力18 n mile,可将1 个班组的“海豹”队员(6 人)投放到中等距离远的地方[2]。20 世纪70 年代末,在MK 8 基础上研制完成了MK 9蛙人输送艇,该艇在6 kn 航速下,具有37 n mile 的最大续航力,可搭载2 名特战队员和MK-31 轻型鱼雷,增加了在防区外攻击敌舰艇的能力;再改型的MK 9-1 可搭载2 名艇员和大型深弹。但是,无论是MK 8-0 还是MK 9 都存在作业距离近,只能在浅水区域投放,容易被探测或搁浅的不足,且由于缺少通用部件,维护费用高昂。上述原因促使美国海军亟待发展一种全新的蛙人输送艇技术。
1988 年,美海军提出了改装蛙人输送艇的要求,并于20 世纪90 年代通过了第1 艘MK 8-1 蛙人输送艇技术评估[3],该艇基本尺寸与MK 8-0 型相似,最大航速达9 kn,续航力为36 n mile,内部空间更大;可携载6 名特战队员,并搭载大型深弹;装有先进的电子设备,包括带自动导航仪的自动进坞系统、用于水雷探测和蔽障的高频声呐,目前正在加装带浮标天线的全球定位系统接收仪[4]。MK 8-1 的研制成功标志着美国海军蛙人输送艇设计已趋于成熟,在投放能力方面处于世界领先地位,其技术规格、作战性能、灵活性以及成本的高效运用,吸引了世界上许多国家的关注。
随后,哥伦比亚集团对MK 8-1 的结构和维修性进行改进,研制出“Gator SDV”(Piranha SDV-X),如图2 所示。该艇尾部外形在MK 8 基础上,增加了一块活动盖板以减小水流冲击对特战队员的影响,可并排坐2 人,航速达7 kn;动力系统采用银锌电池及直流无刷电机单桨驱动技术,动力强于动力定位的船舶(dynamically positioned vessel,DPV);导航技术采用成熟商用的仪表及避障声呐[5],以方便运输及降低成本。
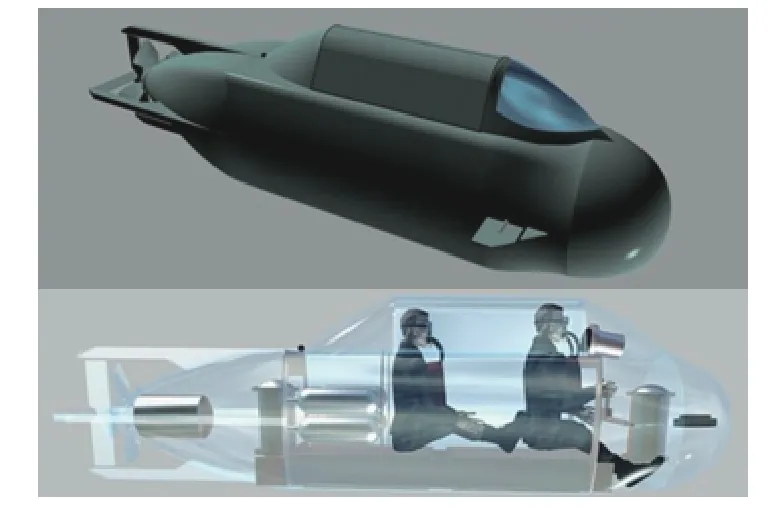
图2 Piranha SDV-X 外形结构设计图Fig.2 Structure design of Piranha SDV-X
未来,美国的浅水作战潜器(shallow water combat submersible,SWCS)—MK 11 将取代MK 8-1,其长6.8 m、宽1.5 m、高1.5 m,质量4 056 kg,航程150 n mile,航速6~12 kn,不带水听阵,可搭载6 名以上艇员。其外形由美国特力戴布朗工程公司设计,如图3 和图4 所示[6]。该艇于2014 年进行交付前的第1 次海试,并于2017 年服役[7]。
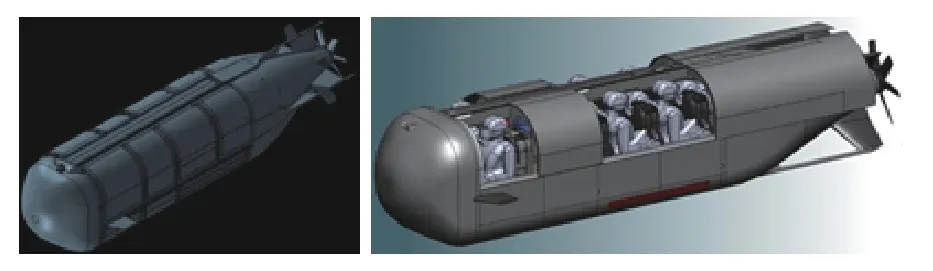
图3 MK 11 外形结构设计图Fig.3 Structure design of MK 11

图4 MK 11 湿式蛙人输送艇原理样机尾段结构Fig.4 Principle prototype tail structure of wet diver delivery vehicle (MK 11)
美国巴特勒公司、金枪鱼公司和哥伦比亚集团公司利用结合研制无人水下航行器(unmanned undersea vehicle,UUV)和蛙人输送艇技术的成功经验,融入有人与无人操控的设计概念,联合研发出具备充足能源、长距离运送有效载荷、水下长持久力的新一代双模蛙人输送艇“普罗特斯”(PROTEUS)。该艇以海豹突击队曾使用的美国高级海豹输送系统(advanced Seal delivery System,ASDS)为基本外型(见图5),具有强大的搭载能力,既可搭载1 500 kg 的有效载荷,还可搭载用于布雷或攻击的武器,以及其他可快速执行任务的小型UUV,必要时作为水下前沿作战的补给母艇;航速为2~4 kn 时,最远航程可超过900 n mile(电池总能量为296 kW·h);通过采用标准模块化舱段设计,携带生命支持系统,可搭载6~8 名特战队员;连续作战时,其充电时间较长,但快速能源补给技术已于近期获重大突破。优化后的PROTEUS 技术参数为: 外形尺寸长7.82 m,宽1.61 m,高1.62 m,外壳采用玻璃纤维非金属材料合成,干重质量为3 737 kg;正常荷载能力下最大潜深可达45.72 m,以最高航速10 kn 航行可续航50 h;采用均衡负载技术,可在平台两侧各搭载725 kg 有效载荷[8]。

图5 多功能双模蛙人输送艇PROTEUSFig.5 Multi-function dual mode of diver delivery vehicle PROTEUS
2)英国
英国的SUB Seal 是一型基于MK 8 设计改造的先进水下作战蛙人输送艇[9],如图6 和图7 所示。该艇由英国詹姆斯渔业防务公司(James Fisher Defence,JFD)生产,通过在MK 8 中部增加一个特殊的干式甲板换乘舱(dry deck shelter,DDS)形成湿态下干舱模式的防湿态环境,以保存作战人员的体力,增强特战队员作战能力。在保留MK 8 多种优势技术的同时,该艇增加了很多现代技术组件,使得整个装备具有更佳的操纵性;在尾部的主推进器取消了后控制水平舵,使得特战队员可面向氧气仪表面板;整艇经优化设计后,空间尺寸为长7.4 m、宽1.7 m、高1.6 m,干重质量为3 500 kg;该艇航速大于7 kn,巡航速度5 kn,续航力50 n mile,作战深度30 m,可搭载10 名作战突击队员(前舱2 名领航员,中段一排4 名队员,共2 排)和200 kg湿式状态有效载荷;动力系统由2 个10 kW 的主电机和2 个 2 kW 助推器组成,以锂磷酸电池作为能源;采用一体设计将传感器布置在光电罩上,同时将通信、声呐等组件集成于作战系统中。
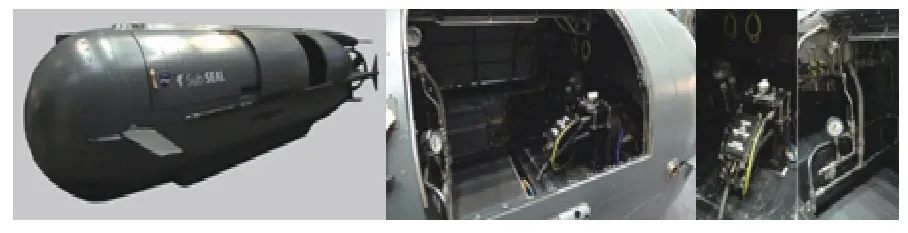
图6 SUB Seal 湿式蛙人输送艇外形及内舱电子部件布置Fig.6 External and internal cabin electronic components of wet diver delivery vehicle SUB Seal
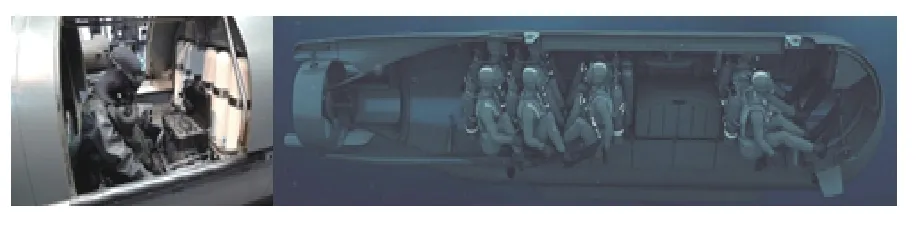
图7 SUB Seal 湿式蛙人输送艇载人内舱布置的生命系统Fig.7 Life system of wet diver delivery vehicle SUB Seal in internal cabin
3)意大利
意大利自20 世纪90 年代以来研制了多型湿式蛙人输送艇,其中现役装备技术性能最好的是CE2F/X100-T 艇,如图8 所示。该艇长7 m,外径0.8 m,高1.5 m,排水量2.1 t[9],最大潜航速度5 kn,巡航速度4 kn,续航力约50 n mile,作业深度30 m,最大深度可达100 m,可搭载2 名特战队员[10];输送艇底部挂载武器系统,可由伪装渔船输送或直升机直接投送;采用卫星定位技术进行精确导航;可通过整体集成控制模块技术升级艇的性能,自动驾驶系统由全球定位系统(global positioning system,GPS)和数字罗盘技术集成;可搭载5 枚微型鱼雷及武器发射器[10]。
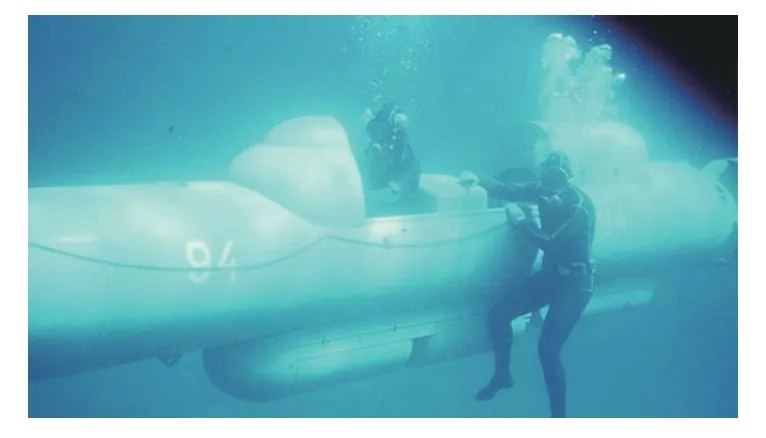
图8 CE2F/X100-T 艇Fig.8 CE2F/X100-T swimmer delivery vehicle
4)德国
Gabler WTD71 型蛙人运载器是德国Gabler 公司根据海军特种部队的作战需求设计的一款可搭载于潜艇形似鱼雷的蛙人运载平台[11],如图9 所示。该运载器主要技术特点有: 采用长度可纵向伸缩、径向翼板可折叠扩展的防护外壳(罩)技术,将特战队员与冲击水流隔离,可搭载2 名特战队员或装备;通过优化设计,改善了艇内的舒适性,最大程度减少了特战队员的体力消耗;外壳壳体采用防水、稳固、无磁性的材料技术,特有的全无磁蛙人支持系统可满足在淡水或海水中的作战要求,当其被鱼雷发射管释放后,特战队员及平台能快速进入作战模式;可将2 个或多个运载器组合在一起,以形成高战斗力的作战装备;采用533 mm口径鱼雷外形设计,优化后外形最大长度为3.4 m,释放后运载器展开长度达5 m,内部直径扩展至约0.7 m,航速3 kn,航程10 n mile。
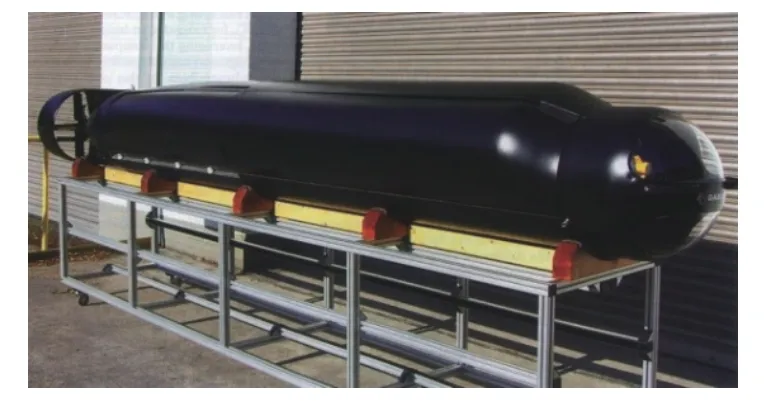
图9 Gabler WTD71 照片Fig.9 Picture of the Gabler WTD71
5)小结
目前在研湿式蛙人输送平台的国家主要有美国、德国、意大利、英国及瑞典等,约近10 种型号,主要有美国MK 系列、意大利CE2F 系列、德国Gabler 公司的蛙人输送平台、瑞典Seal 蛙人输送平台、阿联酋和伊朗联合研制的A1 Sabehar、克罗地亚的R-1 和R-2 等。其中: 美国MK 8 型拥有最先进的湿式蛙人输送艇技术;意大利的湿式蛙人输送艇可携带5 枚微型鱼雷,采用控制模块技术,具有极强的攻击力;瑞典的湿式蛙人输送艇实现了水面/水下作业,水面高速接近任务区,水下低速执行任务;德国Gabler 公司的蛙人输送平台采用鱼雷外型设计,既可组成4 人一组的作战分队,亦可单兵作战;阿联酋的圆柱形输送艇自治性高、导航能力强、负载能力大;俄罗斯的蛙人输送艇则突出自主性。
综上所述,下一代湿式蛙人输送平台将集各种专业技术所长,朝着具有特殊用途作战需求的方向发展[12]。部分典型湿式蛙人输送平台技术性能对照参见表1。
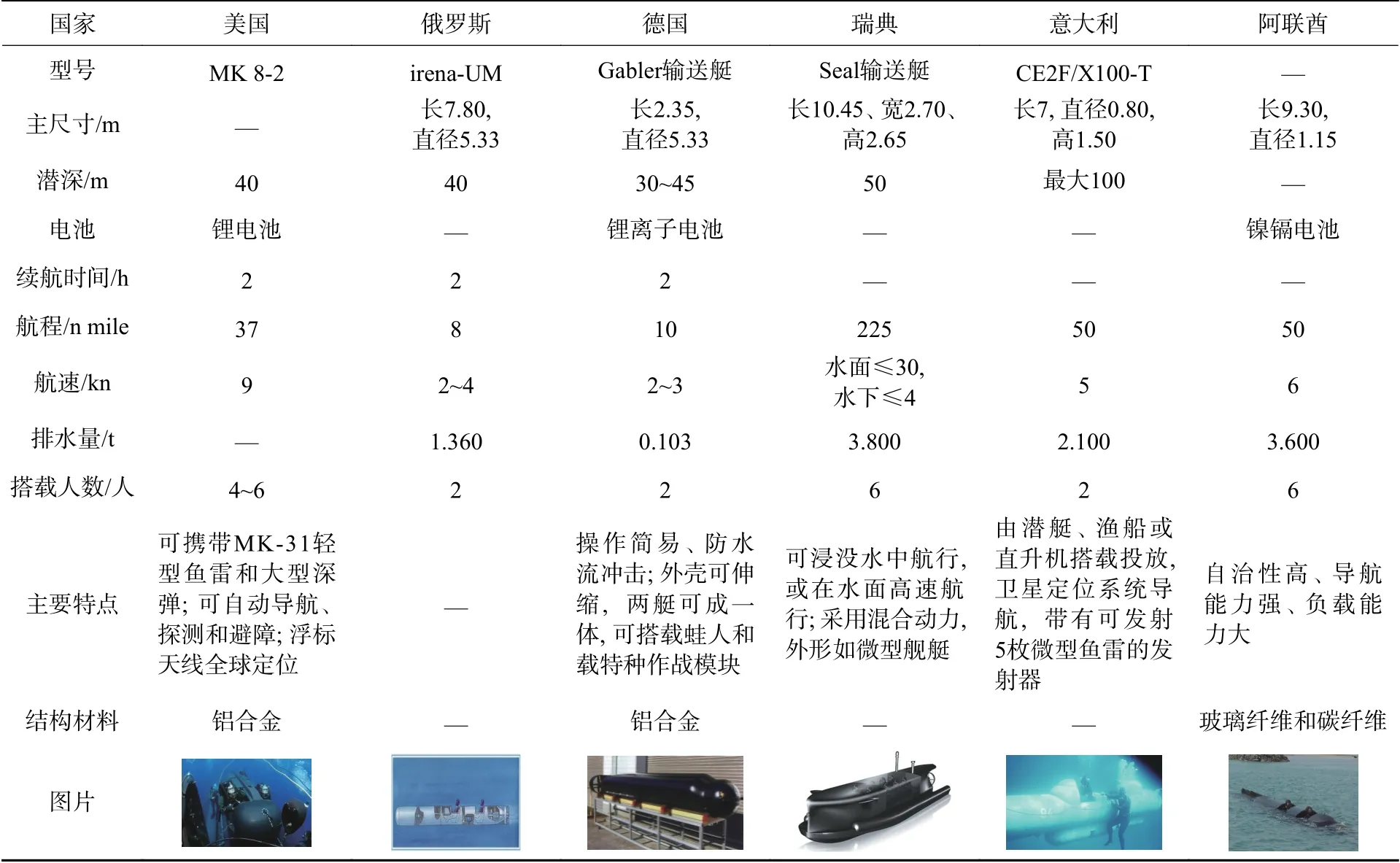
表1 典型湿式蛙人输送平台技术性能指标Table 1 Technical performance of typical Sea-Air-Land(SEAL)delivery vehicle
1.2 干式蛙人输送艇
美国ASDS 是一种典型的干式蛙人输送艇(如图10 所示)[13],其可由核潜艇、水面舰艇或运输机携带至目标近海投放,并自航至作战海域[14]。ASDS 艇长19.8 m,直径2.4 m,干重质量55 t,艇壳为高强度玻璃钢,磁性水雷无法对其构成威胁。其尾部安装有1 个超气压处理室供受伤人员医疗救治;中部是1 个干式舱,可提供舒适的水下航渡环境,有利于特战队员保存体力,增强战斗效能,最高可容纳16 人(如果搭载较多装备,通常搭载8 人),另配有1 个供特战队员快速进出的密封转换舱。ASDS 动力系统由功率为42 kW 的电动机带动尾部螺旋桨驱动,采用锂离子电池,最高航速8 kn,最大航程125 n mile,最大作战深度60 m;另有2 个艏部推进器和2 个艉部推进器来保证良好的操纵性。艇上配置有先进的主被动声呐系统、雷达以及电子潜望镜(配备电子摄像机,而不是传统的光学设备),可供蛙人水下特种作战部队进行水下态势分析,并在登陆前对海岸进行监视[14];桅杆上装有光电传感器,能捕获夜间影像,并通过数据链传输给指挥部门;此外,在ASDS 上安装了ATM85 遥控声呐信号调制解调器后,其可作为一种载人袖珍潜艇,在100 m 深度巡航时,通过国际互联网向岸上设施发送电子邮件,不必从水下伸出天线,提高了潜艇的隐蔽性。2009 年,ASDS 因燃烧事故退役。

图10 搭载于潜艇平台上的ASDSFig.10 ASDS mounted on the submarine platform
在ASDS 的基础上,美国还研制了3 款基于商用技术、体积较小的干式蛙人输送艇,也叫用户作战评估系统(user operational evaluation system,UOES)1~3,即UOES1(S30li),UOES2(S351)和UOES3(Button5.60)[15-16]。其中,UOES1 是由美国洛克希德马丁公司和英国MSUBS 公司共同设计研制(如图11所示),其外形长7.25 m,外径2.34 m,高1.75 m,排水量13.1 t,最大潜航速度7.6 kn,最大潜深100 m,可以搭载2 名驾驶员和6 名特战队员,于2013 年11 月交付美海军,2014 年2 月完成蛙人试水;UOES2由英国MSUBS 公司设计制造(如图12所示),其外形长11.9 m,外径2.2 m,高2.5 m,排水量26 t,最大潜航速度10 kn,最大潜深125 m,可以搭载2 名驾驶员和8 名特战队员,于2014 年7 月交付美海军,2015 年2 月完成艇身强度测试;UOES3 是由通用动力电船公司和意大利GSE Trieste 公司共同研制(如图13 所示),其外形长9.7 m,外径1.9 m,高1.9 m,排水量17.7 t,最大潜深110 m,可以搭载2 名驾驶员和4 名特战队员,2014 年10 月交付美海军并完成测试工作。

图11 干式蛙人输送艇UOES1Fig.11 Dry diver delivery vehicle UOES-1
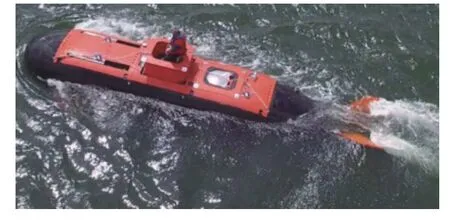
图12 干式蛙人输送艇UOES2Fig.12 Dry diver delivery vehicle UOES-2

图13 干式蛙人输送艇UOES3Fig.13 Dry diver delivery vehicle UOES-3
1.3 水面/水下蛙人输送艇
水面/水下蛙人输送艇是一种采用在水面高速,水下低速航行的新概念输送平台,集水面运载母船和蛙人输送艇的功能于一身,无需水面搭载转驳,即可完整地实现蛙人高速、远程、隐蔽输送等特种作战任务。
美国的多用途作战艇(multi role combatant craft,MRCC)既可在海面高速行驶,又能下潜到海水中一定深度航行[17],在水面或半潜航行时,由安置在耐压壳中的435 PS(约320 kW)增压柴油发动机驱动;下潜航行时,则由锂离子电池为2 个无刷直流推进器提供动力。水面航行时,航速为30 kn时续航力为250 n mile,航速为35 kn 时续航力为180 n mile,最大下潜深度20 m,艇壳采用铝合金材料,外层包裹有聚氨酯合成泡沫类材料。
英、美联合开发的SBS MKIII 输送艇具有战术综合运用能力强、操作简单、保养维修成本低、投入战斗速度快、可实现快速反应的特点[3]。该艇可由潜艇、水面舰艇、直升机甚至小型民用渔船携带,体积小,隐蔽性好;可搭载6 名特战队员和武器装备,采用的半潜设计技术可缓解特战队员长时间在水下呼吸带来的疲劳和各种生理方面的不适;外壳采用涂橡胶材料制成,在壳体的各充气构件之间有塑料甲板。
英国James Fisher Pod 101 是MK1 的升级型产品,为显著降低目标特征信号,在进入半潜状态前可以在水面高速航行,其在水面航行时靠柴油机驱动;水下则由电池动力驱动。
瑞典DCE AB 公司为英国皇家海军特战队员研制的Seal MK1 输送艇是由DGB(diver group boat)专用艇改装而成[18]。该艇于2001 年开始设计,2009 年初完成投产艇型,2011 年正式交付给英国皇家海军特别舟艇部队。其采用碳纤维增强的乙烯基酯材料制成单层艇壳,带有可充气船围保持其稳定性,艇底龙骨经过强化处理,可用于登滩行动;艇内可容纳2 名操艇人员和6 名特战队员,有400 m3的有效载荷、潜水设备以及救生呼吸设备的存储空间等;水面航行状态下,可抵抗3 级海况,水面巡航速度25 kn,满载下的最大航速30 kn,半潜或水下潜航速度仅5 kn,水面转水下只需耗时150 s;依靠柴油发动机续航可达180 n mile。
韩国的SDV-1000W 是2009 年VOGO 公司借助瑞典技术合作开发的水面/水下蛙人输送艇,其采用混合动力驱动方式,水面航速达35 kn,最大航程130 n mile。水下航行时由电机提供动能,水深18 m 环境下续航时间达3 h,最大航程25 n mile;可携带10 名全副武装的特战队员。已有5 艘部署于韩国海军特种作战旅[19]。为适应集装箱运输和空投的需求,该型产品于2013 年和2015 年又发布了2 个不同的版本,更改了最初的动力设计,将可调桨改成了喷水推进器,以获得更好的航行性能。
2003 年,俄罗斯成功研制出水面/水下蛙人输送艇“海神”[18],其外形与美国MRCC 相似,水面高速航行时依靠涡轮柴油机(435 PS,约319.725 kW)驱动,水下航行时则以电动力驱动。该艇长9.9 m,高1.68 m,最大工作深度约20 m,可运载2 名操作人员和4 名特战队员,最大载重636 kg。水面最大航速24 kn,航程约130 n mile;半潜航行最大航速5 kn,航程120 n mile;水下最大航速3 kn,航程约6 km。
法国的“海怪-90”输送艇上安装有90 PS(约66.15 kW)的雅马哈发动机[3],航速为20 kn,水面续航力90 n mile,可保证在水下5 m 深度机动航行,极限潜水深度50 m。
荷兰设计的水面/水下蛙人输送艇P-7(PHANTOM-7)[18],能够输送7 名特战人员及装备,具有水面高速滑行、水面低速航行和水下航行3 种模式,最大深度30 m,水面航行时最大航速>30 kn,航程约300 n mile,由260~310 PS(约191.1~227.85 kW)的柴油机进行驱动,采用泵喷推进器,壳体采用碳纤维复合材料和高强度环氧树脂,座舱盖采用聚碳酸酯,内部装置和设备采用316 海上级别不锈钢。
2 技术体系
2.1 水下输送平台技术
如图1 所示,水下输送平台技术主要包含平台总体、动力推进、航行控制、导航定位、通信指挥、蛙人舱室、避碰探测、材料及综合管控技术等。
1)平台总体技术是蛙人水下输送平台最基本的技术。
2)动力推进技术保障蛙人水下输送平台作战范围可达与作战时机有效。
3)航行控制技术保障蛙人水下输送平台航渡过程姿态稳定。
4)导航定位技术保障特战队员在复杂水文环境中能获取精确的导航定位信息。
5)通信指挥技术保障特战队员的准确投放,实现作战协调一致。
6)蛙人舱室技术保障特战队员在水下或半潜式航行过程中有一定空间舒适性和体力持久性。
7)避碰探测技术保障特战队员和蛙人水下输送平台在复杂且不确定性较高的近岸或潜水行动环境中实时探测周围路线。
8)材料技术保障蛙人水下输送平台在复杂水域环境中不被腐蚀,在大深度海域中具有较好的耐压性能。
9)综合管理控制技术保障蛙人水下输送平台的供电控制以及平台与特战队员间的信息交互管理。
2.2 保障技术
蛙人水下特种装备保障技术主要包含输送平台及各系统功能检测技术、平台载具的布放回收技术、输送平台及载具进行日常操练的模拟训练技术以及保证各种设备正常运行的使用保障技术等。
1)系统功能检测技术包括功能、操控和其他检测。功能检测用于输送平台使用前对产品进行调试及技术状态检测,产品使用后对产品记录数据进行下载、处理以及显示等;操控检测用于接收显示光纤线缆实时传回的探测数据,及由特战队员遥控操作UUV;其他检测指完成输送平台的气密检查、包装运输和存储等。
2)布放与回收技术是特种作战兵力部署的关键技术之一,决定着特战队员执行秘密渗透任务的成功与否。作战过程中要保障蛙人水下输送平台有效隐蔽布放,待完成任务后保障蛙人水下输送平台安全回收。目前主要由大型舰船吊放、特种潜艇甲板背负或直升机吊放等措施在海上进行快速布放回收。
3)模拟训练技术包含输送平台模拟训练技术、小型平台释放及回收模拟训练技术和潜水服快速准确穿戴技术等。
4)使用保障技术包括: 为保障训练正常进行,提供给输送装备的使用机动保障平台及配套技术;为输送平台和携具提高能源保障能力所涉及的能源保障技术;为提高特战队员出发前保存体力配备的如潜水服、头盔、氧气瓶及外骨骼架等专业设备而设计的专用运输平台技术。
2.3 武器技术
蛙人特种作战时为打击敌特战队员或破坏敌方设备设施时会用到打击武器。打击武器技术主要包含微型鱼雷技术、自航榴弹技术及未来的新特武器(微型导弹+定向能武器)技术;自卫技术包括水下次声波技术、两栖枪技术和匕首枪技术(如俄罗斯新研的水下超空泡子弹技术就是水下单兵自卫武器的一个发展方向)。
2.4 试验技术
试验验证是蛙人水下特种装备研发的重要环节。试验技术主要包括以下两部分。
1)湖上干、湿式蛙人舱验证技术。在研制阶段,需要基于湿式、干式、水面/水下输送平台的技术特点开展干、湿式蛙人驾乘舱的试验验证研究,便于不断优化调整平台的作战使用效能。
2)海上整艇集成试验技术。当针对各种舱室、能量、导航、通信和总体等技术的湖上验证成功完成后,将各系统集成为功能完整的蛙人水下输送平台,再针对平台进行海上整艇试验验证。
3 蛙人水下输送平台关键技术
蛙人水下输送平台综合了潜艇、鱼(水)雷、水下机器人等多种技术,是一个多学科交叉融合的高技术载体,具有专业性强、技术要求高等特点,其关键技术如图14 所示。
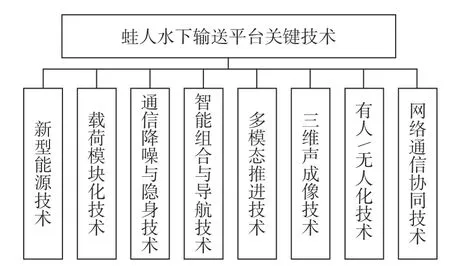
图14 蛙人水下输送平台关键技术Fig.14 Key technologies of diver underwater delivery vehicle
3.1 新型能源技术
能源技术发展决定着蛙人水下输送平台的航程、航速及重复使用性。蛙人水下输送平台推进系统的关键技术是新型锂离子电池与燃料电池技术[20]。
相较而言,锂离子电池的循环使用寿命较长,约为传统银锌电池的18 倍;锂离子电池的空间体积小、成本低、效率高,具有明显的优势[21]。随着新技术的发展,锂离子电池在电子控制和新型模块化设计方面都有较大突破。锂离子电池系统也朝着坚固耐用、超长寿命、充电快速、使用灵活、易于维修和安全性能高的方向发展。同时,锂离子电池系统还支持高电压和高电流场景下的能量传输,以及和太阳能电池板直连实现充电。美国海军MK 8-1 型艇采用的就是锂离子电池。
燃料电池是一种应用前景广泛的新能源电池,其可以大大提升蛙人水下输送平台的续航能力,能量转换效率高达80%以上,具有零排放,较好的自持力、隐蔽性及可靠性,可长期稳定运行的特点。近年来,越来越多的军事强国在探索如何将燃料电池技术应用于水下特战装备,例如: 美国海军的深海探索船和无人潜艇的动力系统采用的是燃料电池;德国基于金属储氢技术也将燃料电池技术装备于212A 级潜艇。
尽管现有的锂离子电池和燃料电池可以大幅提升水下特战装备的动力性能,但各国仍在进一步探索不依赖空气、水下续航时间长、支持多任务作战使用的新一代蛙人输送艇动力技术。近年来,有学者研发了一种质子交换膜燃料电池技术[22],这种燃料电池具有工作温度低、噪声低、能量转换效率高的特点,是一种不依赖空气推进的水下运载器的理想动力源。
3.2 载荷模块化技术
平台载荷采用模块化组合方式的结构设计,便于设备的检修和更换,可大幅提升系统的可维修性,同时还有利于系统的组合和扩展。在水下特战装备领域中,蛙人运载器和蛙人输送艇,从元件到整艇的舱段都可进行模块化设计。
平台载荷模块化设计主要依赖于三维设计、虚拟装配技术以及生产工艺技术。尽管模块集成技术与传统的结构设计存在较大差异,但仍随着理论研究和型号研制的深入开展而快速向前推进,并趋于完善。目前,美国、瑞典、德国等国的蛙人水下输送平台载荷模块化技术已非常成熟,各国在提高模块化集成技术和建造安装工艺的同时,也聚焦于各类新型工艺技术,例如平台总体合段技术、艇体结构变形精度控制技术、主干电缆连接技术和大型模块进舱技术等。
未来蛙人水下输送平台将会如UUV 一样朝着多功能模块组合化方向发展: 一方面,实现平台元件模块化设计,将同一个子系统的电子元器件封装在一个水密舱段内,方便平台的拆装检修;另一方面,实现整艇分舱段模块化设计,可随时更换载人舱段和载器舱段,满足不同作战需求。
3.3 通信降噪与隐身技术
由于螺旋桨振动产生的噪声、平台搭载的通信技术、生命支持技术以及蛙人进出舱技术等都会影响水下特种作战装备的隐蔽性。通信降噪与隐身技术可保障蛙人水下输送平台将特战队员隐秘的输送到目的地,完成秘密渗透任务[23]。
由于声波在海水传播过程中信号衰减极其严重,同时还受海水介质、盐度、温度、密度、深度及距离等影响,使得通信带宽受限。一方面,海水不同深度处的密度不同,介质分布不均匀,容易使声波在传播过程中发生界面反射和散射,即多途效应;另一方面,如果使用高速通信技术,受信道带宽较窄和信道多途效应的影响,信号在传输时会造成严重的码间干扰,进而导致误码率急剧升高。这是目前水声通信领域急需重点解决的技术难题[24]。目前,水声通信研发方面的成果多集中在美、英、日、法等国。
除了对噪声、通信、特战队员进出舱等技术进行进一步的深化研究外,未来蛙人输送平台所配备的各种专用设备,包括设备外形流线型、推进系统减振降噪、激光通信等技术都需不断优化。同时,平台上还需配置电子对抗设备用于保障其隐蔽性。例如,意大利微型潜艇MG120/ER 上配置的一段小型六角形天线可以实时监控侦测敌雷达信号电磁波,当发现有可疑电磁信号靠近时,会立即向质控中心发出警报,并采取隐蔽保护措施。
3.4 智能组合与导航技术
在复杂海洋环境下,为使蛙人水下输送平台在无任何通信环境下在水下长时间航行并顺利完成任务,精确导航技术作用至关重要。
当今,美国和德国在精确导航技术领域具有优势。多数蛙人水下输送平台上使用的是组合导航系统,将有各自数据特点的声、光、电等多种传感器装备于平台的侦察导航系统上,利用一根高探测性能的可伸缩桅杆来增强其环境感知能力,并配合多普勒探测仪使用,从而实现蛙人运载器的长航程高精度导航任务。侦察导航系统还可根据导航数据的质量在多普勒速度仪、GPS 定位系统和惯性导航系统之间自动切换,大大减小了系统定位误差。
目前,蛙人水下输送平台的导航技术正朝着自主可靠、多功能化、低功耗化、智能化等方向发展。常见的导航技术有: 航位推算导航、惯性导航、声学导航、视觉导航和物理场匹配导航等[25]。但单一导航技术在精度和可靠性方面往往不能满足现代化军事战争的需求,需要将多种导航技术适当组合,从而大幅提高系统的导航精度,也相对降低了成本和技术难度,同时有效提升系统的可靠性和容错性。
3.5 多模态推进技术
多模态推进技术主要指用于蛙人水下输送平台的集成电机推进技术,将平台所用推进电机与螺旋桨组合成一种全新概念的推进器,具有推进效率高、噪声低、易于携带等特点,可以较好地满足蛙人单兵作战需求[3]。
目前这种推进技术主要采用单转桨导管推进方式,包含转子、定子和导流罩三部分。电机采用一种结构尺寸较小、质量较轻的锥形电机,安装在平台的外部,不需像传统推进系统中的联轴节传动装置的安装模式,极大地节省了空间,大幅提高电机推进效率,降低电机振动噪声、摩擦噪声以及螺旋桨旋转产生的流噪声,是一种较为理想的安静型推进装置。目前,美、意等国的蛙人运载器和UUV 均装备了该装置,极大地降低了零部件维修量,提高了系统的可靠性、安全性和保障性。
多模态推进技术由于可提高推进功效,极大地降低推进噪声,并可用于鱼雷、潜艇等推进装置上,将会被蛙人水下输送平台动力系统优先采用。另外,由于水面/水下蛙人输送艇采用了水面/水下双模推进模式,所以水面/水下一体式集成推进技术和高速水面/水下的矢量推进技术也是今后发展的重点。
3.6 三维声成像技术
当前,海洋军事战争、海洋资源开发、海洋打捞作业和海洋勘探侦测的需求使得成像声呐技术越来越受重视。尽管目前光学成像精确度较高,但其水下成像范围较窄,一般的光学成像相机在清澈海水中仅能传播10 m 远,在较为浑浊的水域中几米内的目标都很难看清。因此三维声成像技术是一种较为可靠的方式,其可对十几米到几百米的区域成像,且不受混浊水域下水文条件的影响。
蛙人水下输送平台在水下航行过程中,首先要求能在足够远的距离内快速发现障碍物,确定水平方位距离,并在发现障碍物后准确判断障碍物的垂直方位,以便制定合理的规避路线[26]。
根据工作方式,声呐可分为扫描声呐和多波束成像声呐。扫描声呐具有技术成熟、结构简单、价格便宜,研制费用低,周期较短的优点,国内已有多款成熟产品;缺点是由于扫描时间很长,几十米距离内的障碍物都可能漏扫,增加了航行的危险性,另外,长扫描周期会导致前视避碰声呐无法对水下运动物体进行准确判断。多波束前视避碰声呐的优点是成像速度快,能较准确地分辨出水下运动或静止的物体;缺点是系统复杂,国内市场上无成熟产品,国外类似产品基本上为民用,且存在禁运的可能。
根据成像效果,成像声呐可分为二维成像和三维成像声呐2 种。二维成像声呐通常显示一定垂直夹角内的水平声切面图,相对三维成像的速度更快,应用广泛,既可以用于声成像,也可以用于避碰。国外典型的二维成像声呐有英国的Dolphin 6201(如图15 所示)、BlueView P900(如图16 所示)以及加拿大IMAGENEX 公司的Delta T 837(如图17所示)等。三维成像声呐系统构成复杂,体积相对较大,一般用于水下打捞需要对水下物体进行仔细辨认的场合。
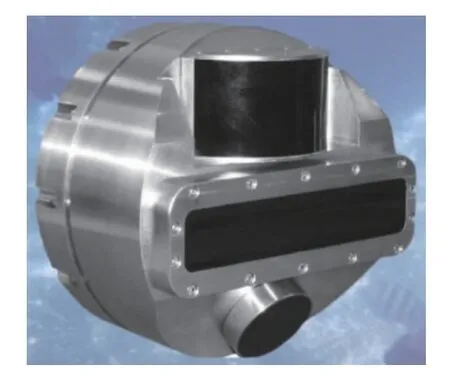
图15 Dolphin 6201 二维避碰声呐Fig.15 2D-collision avoidance sonar Dolphin 6201

图16 BlueView P900 二维成像声呐Fig.16 2D-imaging sonar BlueView P900

图17 Delta T 837 二维成像声呐Fig.17 2D-Imaging sonar Delta T 837
根据用途划分,声呐可分为成像声呐及前视避碰声呐。国外典型的前视避碰声呐如英国专为UUV导航设计的Dolphin 6201[27],该声呐具备目标识别及避障功能。典型的成像声呐如IMAGENEX 的Delta T 837[28],该声呐仅对水下前方的声反射回波按能量大小进行伪彩色声成像,不具备目标自动识别及避障功能。
1)声透镜成像声呐
声透镜波束形成技术已经由最初的理论研究和试验研究逐步走向实用阶段。国外试验型声透镜成像声呐主要有LIMIS 手持型声呐、GLACIS 型声呐、ABIS 型声呐。丹麦MacArtney 公司生产的透镜声呐DIDSON(如图18 所示)己投入市场[29]。

图18 DIDSON 成像声呐Fig.18 Imaging sonar(DIDSON)
2)二维回波成像声呐
美国Reson 公司开发的新一代数字声呐SeaBat 8125 属于二维回波成像声呐。这种产品采用一维线阵,通过机械平移操作得到二维面阵,最后再扫描每个位置的二维数据进而合成三维图像[30],这种方式虽较为简单、硬件复杂度低,但合成精度也较低。
3)三维回波成像声呐
三维避碰声呐系统构成复杂,体积相对较大,为保证成像质量,图像均需多次叠加处理,成像处理速度较慢,主要用于水下打捞等需对水下物体进行仔细辨认的场合。典型代表有BlueView、Echoscope 等产品。澳大利亚开发的水雷成像(acoustic mine imaging,AMI)声呐属于三维回波成像声呐[31],是一种主动甚高频三维成像声呐,可大幅提升澳大利亚海军在沿岸混浊水域的水雷战能力。AMI 是为“胡昂级”沿海猎雷艇设计的,按计划,工程的第2 阶段是在“双鹰”遥控灭雷具上装备系统样机。
目前,许多军事强国均高度关注高分辨率三维成像声呐技术的发展与研究。纵观当前三维声成像技术的发展,主要集中在以下3 个方向: 基于声透镜技术实时获取动态视频图像;以一维线阵为基础获取目标二维图像,然后基于图像拟合技术得到三维立体图像;基于二维基阵实时获取空间目标的三维图像。
3.7 平台有人/无人化技术
平台有人/无人化技术是将蛙人水下输送平台或大型UUV 通过模块化舱段技术更替,使其成为有人与无人共同使用的特种作战输送平台,为随行特种作战任务提供物资及人员的保障支持。
2016 年,泰勒斯公司在法国巴黎海军装备会上展示了一款具有良好隐身性和多任务能力的自主水面/水下系统(autonomous underwater and surface system,AUSS)UUV,其外形形似鱼雷,如图19所示。该系统可执行反潜战、水雷战以及一些商用水下任务。人操时设计航速17 kn,能在距目标10 m 内实现紧急悬停避碰;无人时续航力2 周,可长时间在水下执行情报监视和侦察任务;伸出水面的桅杆配有多种传感器,可与潜艇、水面艇或岸基布放的其他AUSS 进行通信;可搭载多种有效载荷,收集水声、图像和电子数据,通过卫星进行数据回传;自主控制软件作为其关键系统,用于执行自主安全工作任务[32]。

图19 法国泰勒斯公司的AUSS UUVFig.19 AUSS UUV exhibited by French Thales
俄罗斯的“影子”水面/水下无人艇如图20 所示。该艇为三体船型,目前己完成设计研究和理论计算验证。其主要任务是深海海域无人监控、世界海域生态和水文信息收集等。
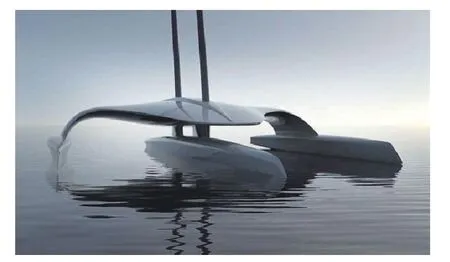
图20 俄罗斯“影子”水面/水下无人艇Fig.20 Underwater and surface amphibious unmanned boat Shadow(Russia)
美海军研发的“PROTUES”蛙人输送艇原型机采用了舱段模块化设计技术,将UUV 的高新技术运用于特种作战装备,实现了UUV 向蛙人水下输送平台的转化。从2018 年举办的海上防务展览会上展出的该艇模型可以获知,该艇为圆柱回转体艇型,其主要任务是将特战队员进行远距离投送,增加了短期内将无人输送平台改造成有人输送平台的可能性,节约了经费投入。
平台智能化已成为蛙人水下输送平台未来发展趋势之一。平台智能化后,可对获取信息进行综合分析处理,实现自动控制和导航的最优化;可迅速对突发状况进行响应,减少人工操作,提高任务完成效率;改变了原来蛙人水下输送平台仅输送蛙人的单一功能。近年来,随着应对多模式威胁的需求和技术的发展,逐渐出现了由水下单一模式输送向水面/水下复合输送、由输送型向输送与攻击结合型发展、由有人作战平台向有人/无人融合的发展趋势,因此蛙人输送平台在承担特种作战任务的同时,应利用水下无人系统已有研究成果来完成水下救援、水下施工等多样化任务功能。
4 蛙人水下输送平台技术发展历程与趋势
4.1 发展历程
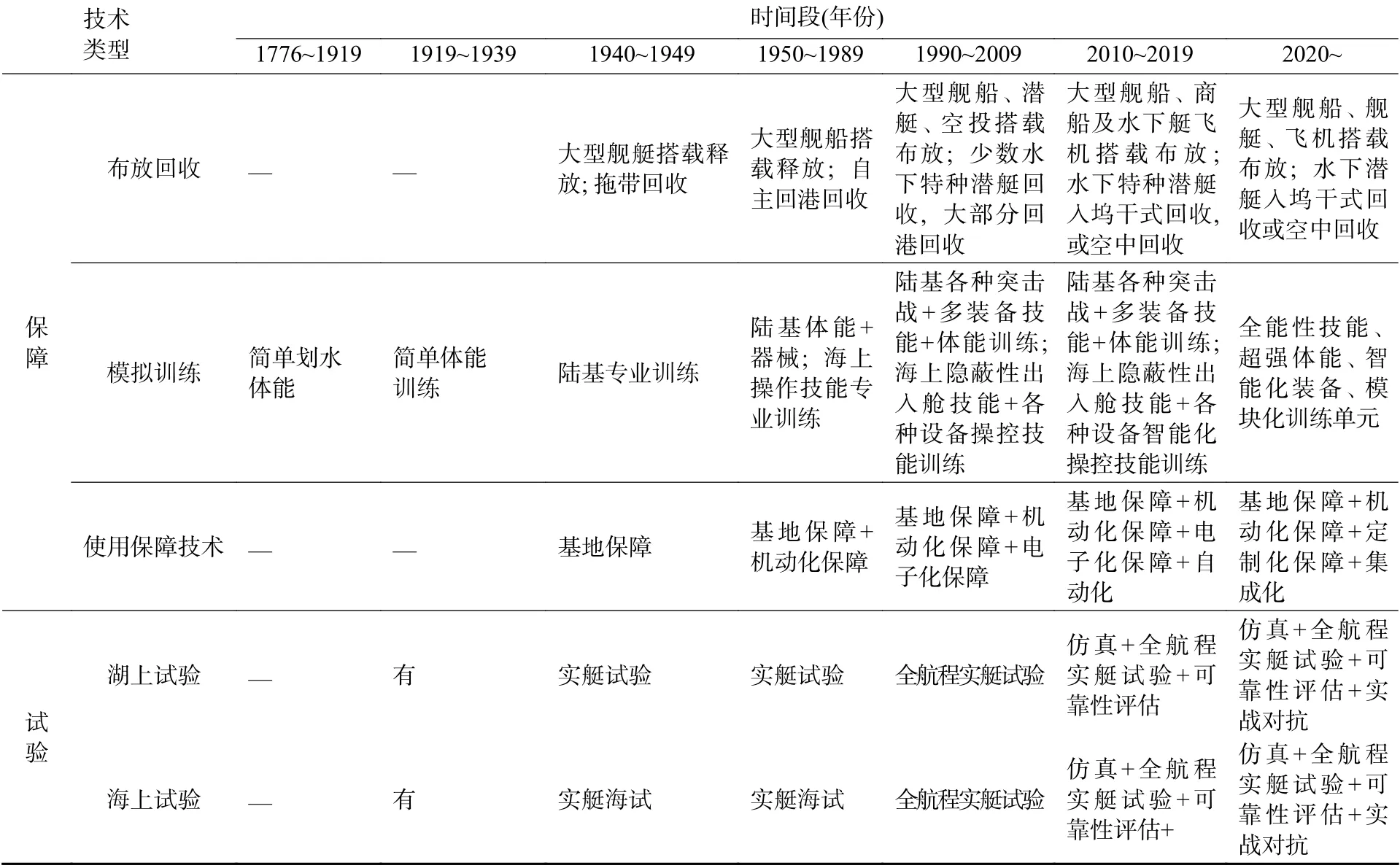
表2 总结了国外蛙人水下输送平台技术发展路线。蛙人水下输送平台经历了从无到有、从简单骑行在鱼雷上运送炸药到依靠空中、水面舰及潜艇等大型母平台投送进行特种作战的装备技术发展历程。由表中可看出,蛙人水下输送平台技术发展主要经历了以下几个重要阶段。
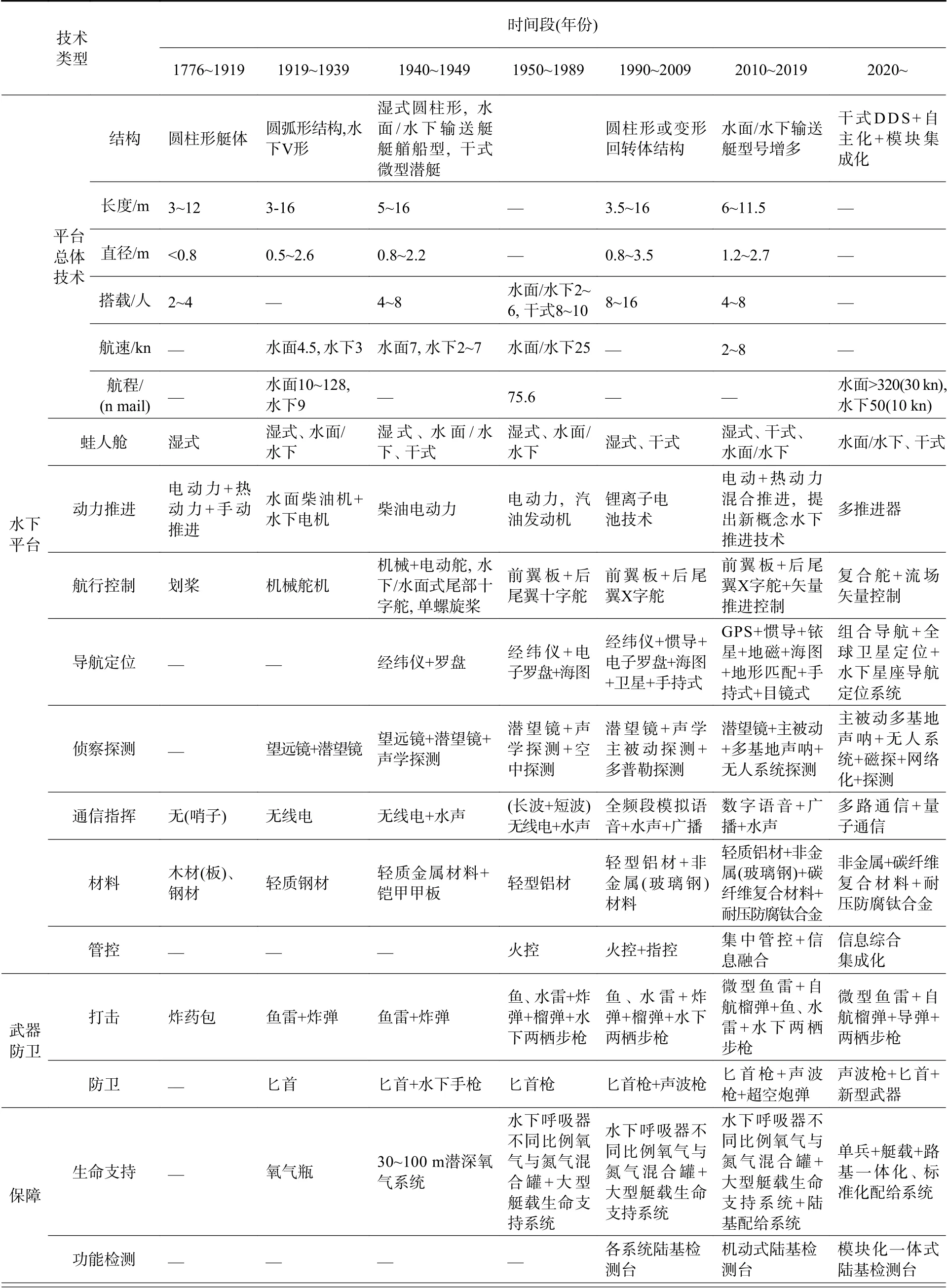
表2 蛙人水下输送平台技术发展路线Table 2 Technology development route of diver underwater delivery vehicles
初始阶段: 一战到二战阶段(1776~1939 年),是蛙人输送平台的初期构想和技术需求不断提出及实践阶段,提出了很多当今仍在采用的技术。
发展阶段: 二战至冷战阶段(1939~2008 年),是蛙人输送平台各项技术不断突破的阶段,研发出众多有代表意义的典型装备,完成了许多反恐、营救、破坏和偷袭的任务,尤其是越南蛙人对美军大型舰艇的重创引起了美军的高度重视,秘密研发了ASDS、MK 8 等著名蛙人运载器。
高速发展阶段: 2009 年至今,随着通信技术、导航技术、自主技术、微小型无人化技术及模块化技术的不断成熟,一直处于停顿的装备技术迎来了革命性创新发展;随着高密度能源技术瓶颈的突破,蛙人水下输送平台的航行距离从20 n mile跃至海上作战半径200 n mile 以上,航速从原来的几节跃至几十节;随着通信导航与定位技术的发展,原来的“敢死队”已变成成绩卓著的特战队。
蛙人输送平台发展至今,出现了湿式、干式、水面/水下蛙人输送平台及配套的通信导航与武器装备。不同蛙人输送平台级别和作战样式构成了以平台为主体的独立的特种水下装备技术体系。
湿式蛙人输送平台质量由几十千克到5 t 左右,主要以蛙人助推器、蛙人运载器和蛙人输送艇系列为主,借用水下航行器的外形设计技术,外形结构多为圆柱体或变结构体,采用电动力推进。由于水下航行速度较低并处于湿式状态,特战队员存在较大精神压力,因此航行距离不可太远,水下浸泡时间也不能太长。
干式蛙人输送艇由于配有干舱段或干湿转换舱,体积较大,通常由小型潜艇改装,各种通信导航设备齐全,保障设施完善,可长时间在水下行进作战,成为未来蛙人水下输送平台的发展方向。平台采用各种先进技术来保障蛙人遂行任务的任务链、时间链及信息链的闭合,具有较好的隐蔽性。
水面/水下蛙人输送艇是目前各国都在积极发展的一种蛙人输送平台,其水下部分采用了水面快艇的“深V”结构,水面部分则采用可降低雷达探测面的隐身性多棱反射面结构,可实现水下隐蔽、水面高速的航渡模式,扩展了作战距离,缩短了到达作战域的时间,并能节约特战队员体能,提高作战效能。
未来不同的蛙人输送平台可采用通用载体、开放式结构和模块化载荷方式设计,以方便实现系统重构和功能转换。在蛙人输送平台发展的高级阶段,应开发集多功能于一体的,具有有人/无人特点的智能化特种作战平台。
4.2 发展趋势
4.2.1 优化的外形结构设计技术
大多数湿式蛙人输送艇采用鱼雷或潜艇外形,如意大利CE4F 和美国MK 8 系列等;水面/水下蛙人输送艇下半部多采用水面高速滑行艇的“深V”艇型,水上为封闭顺滑的流线型外形。为控制排水量,各国干式蛙人输送平台均采取了总体合理布置、系统集成优化、设备小型化等措施,在保证必需的干式转换、侦察探测、生命支持等功能的基础上,对其他系统进行简化和集成,如采用大分舱布置,降低储备浮力,减少甚至取消升降装置,取消部分功能的应急备份设计等。
4.2.2 高比能混合动力推进技术
国外湿式蛙人输送艇普遍采用电机+减速器+螺旋桨推进技术。水面/水下蛙人输送艇采用柴电混合动力技术,水面航行时采用柴油机+喷水推进器形式,水下潜航时采用电动力+导管螺旋桨形式,半潜航行时电动力、柴油动力均可使用。动力电池主要采用能量密度和功率密度较高的锂电池[33];另外,还通过矢量式辅助推进装置实现与母艇对接过程中的高精度动力定位和姿态控制。
4.2.3 蛙人快速出入转换舱技术
为实现蛙人快速出舱,意大利设计的button 5.60 干式蛙人输送艇设置了锁入/锁出干湿转换舱,均衡水舱可将海水注入到干式舱体中,实现进出过程的压力转换和载荷均衡,完成干湿转换,以保证多人同时快速出入蛙人输送艇。
4.2.4 母平台灵活立体投送接口技术
母平台灵活立体投送接口技术目前主要有干甲板掩蔽舱方式和直接背负方式。美国的弗吉尼亚级核潜艇采用了干甲板掩蔽舱方式,这种方式技术上易于实现,蛙人输送艇释放回收率高,但空间和质量转换代价较大,适合排水量较大的核潜艇。直接背负方式空间和质量转换代价较小,常规潜艇及在研小型核潜艇都基本具备搭载能力,其中蛙人输送艇与母艇水下对接技术是未来研究的关键技术。
4.2.5 智能化操控导航技术
水下环境信息透明度低,导致水下操纵和装备应用存在困难,纯粹依靠人工进行判断和反应不符合现代战争快速、精确的需求,因此智能化是未来的发展趋势之一。蛙人输送艇智能化后可对获取信息进行综合分析处理、实现自动控制和导航的最优化,并可迅速对突发状况进行响应,减少人工操作,提高任务完成效率。
4.2.6 模块化技术
现代海战是一种全方位的战争,不同类型的任务对蛙人水下隐蔽机动战术系统提出了不同要求,使其朝多样化方向发展。同时,为适应不同任务需要、提高任务完成质量,在专业化上要求装备功能最大程度地适用于特定任务的要求。模块化设计完美地结合了专业化和多样化,最大限度地利用载体资源,根据任务需求更换相应的功能模块或特定舱段,或进行简单的适应性改造,便可一艇多用,满足不同任务需求,实现了效费比的最大化。
4.2.7 群组化/网络化技术
随着特种作战任务的复杂性越来越高,往往需要不同类型作战单元之间相互配合才能完成任务,群组化作战模式可以大大提高任务完成概率。群组化不是简单的数量叠加,而是不同特性、不同功能的装备之间协同作战,或是由相同作战人员分阶段利用不同功能的作战平台,依靠智能传感器的融合和配置技术以及通过网络建立的大范围通信系统,建立作战小组之间的通信与磋商机理,完成群体行为控制、监测与管理。未来的网络化,则是将水下作战平台组成的“小网络”,纳入到全方位作战体系的“大网络”之中,由更高级别的作战网络统筹指挥水下作战平台网络,使特种作战在最大限度上发挥其战斗威力。
5 结束语
利用水上/水下空间进行非对称特种作战将是未来海战的新型模式。特别是对于拥有完整反介入和区域拒止能力的国家,特战队员进行濒海秘密渗透、侦察监视、夺岛突袭、港口破袭、反恐救援等任务将更加困难。因此,拥有更远航程,更持久续航力、更好水下隐蔽性的水下输送装备成为各国研发的重点。文中对现有国外水下蛙人输送平台的发展历程、研究现状、发展趋势及关键技术进行了全方位深入研究,可知基于未来作战网络化、模块化、智能化及群组化的技术发展趋势,将蛙人特战装备纳入作战体系,将最大限度地发挥特种作战平台的作战能力。可以预见,根据各国自身军事需求及长期积累的新技术发展成果,未来将有更多性能高且稳定、操作性强且更可控的水下先进输送装备不断涌现。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
小哥白尼(军事科学)(2022年5期)2022-08-17
凤凰动漫(军事大王)(2022年3期)2022-06-17
凤凰动漫(军事大王)(2022年1期)2022-04-19
海外星云(2021年9期)2021-10-14
海洋信息技术与应用(2020年3期)2020-08-24
小哥白尼(军事科学)(2019年9期)2019-12-21
小学科学(学生版)(2019年10期)2019-11-16
军事体育学报(2014年2期)2014-02-27
