驾驶室焊装线体数字化解决方案
2023-01-12 03:58何福林
装备制造技术 2022年10期
何福林
(东风柳州汽车有限公司,广西 柳州 545005)
0 引言
数字化技术在汽车制造行业起着越来越重要的作用,从产品工艺设计到产品制造的所有环节,数字化技术能够提供高效的评估方案,有效缩短产品开发制造周期[1]。本文主要阐述数字化技术在商用车驾驶室焊装线规划及建设、焊装线运行管理方面的解决方案。
1 焊装线体数字化解决方案
在作线体布局方案时,首先通过CATIA等三维设计软件,对厂房结构、产线布置、设备布局、车间仓储物流、工艺辅房及公用动力管网等进行建模,利用PDPS等仿真软件对产线运行仿真验证,模拟实际的生产状况,验证产线的产能,以实现最少的设备投资来满足规划产能要求。同时通过产线运行及工厂物流进行仿真,评估物流调度策略、物流路径、库存需求等,实现物流的精益规划。
产品开发初期需对产品进行可焊性分析,检查产品结构在焊接过程的焊枪干涉情况,对零件插入顺序、定位和夹紧位置的变化以及焊接的不同顺序进行模拟检查,及时优化产品结构,为线体规划方案提供产品结构的生产要件要求[2,3]。
在完成了产品结构数模后,对驾驶室焊装线体做方案。
1.1 主线的多车型柔性化解决方案
线体方案设计考虑多车型共线,通过三维建模及仿真验证,确定多车型共线生产的方案,主线多车型共线方案主要考虑工序定位方案:滑台切换、电缸切换、风车切换、NC切换等;考虑输送方案:滚床滑橇输送、往复杆输送、AGV带橇输送等;以及考虑总拼方案:多工位总拼、柔性滑台式、转毂式总拼、机器人带抓具总拼等。焊装主线尽可能柔性化,降低新产品导入的改造难度,避免因新产品导入影响量产车型生产。通过对三维方案仿真分析,选择成本最优、柔性化的焊装主线方案。在实施阶段根据新车型导入时间分期投入工装,同时根据新车型的具体结构,开展新车型的线体方案通过性仿真验证。
以某公司商用车焊装主线为例(图1),焊装线采用滚床滑橇输送实现高节拍输送及环形回橇,采用小滑台切换工序定位及双面夹具滑台总拼满足车型规划的需求;同时线体采用滑橇带载码体进行数字化车型信息随车输送以便下工位读取。线体上件工位采用MES系统下发车型信息,形成MES车型计划与滑橇载码体车型数字化比对,避免装错件等质量问题。
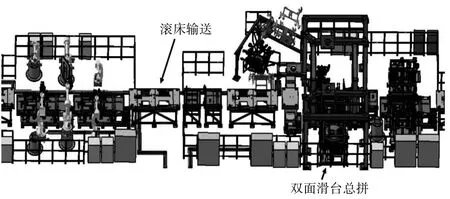
图1 焊装主线方案仿真
1.2 分总成焊接标准工作站解决方案
(1)对于小总成焊接工作站方案,主要有以下种:
①固定式夹具切换工作站,适用于生产节拍要求不高的总成焊接,同时夹具轻便适合人工切换;
②转台式/转毂式夹具切换工作站,用于生产节拍要求较高的总成焊接。以某公司的左右车门总成焊接线为例(图2),结合车门内板总成需要2序上件作业再与车门外板包边、补焊的工艺路线,并利用压机包边设备进行车门包边,线体方案考虑采用转台切换车型夹具实现4平台柔性共线,左/右车门内板总成工位共用机器人焊接成型焊点以提高机器人使用效率。同时线体通过PLC传递工位间车型信息,利用传感器、视觉系统等识别零件状态。
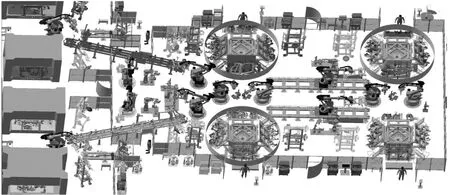
图2 左右车门线方案仿真
(2)大总成焊接工作站,主要有4种:转台式/转毂式夹具切换方案、柔性滑台式夹具切换方案、立体库夹具切换方案及A模块+B模块拼接组合方案。
大总成焊接工作站方案主要根据共线车型数量、场地大小、投资成本等选择最适合的方案。以某公司的商用车侧围总成焊接工作站为例(图3),驾驶室侧围总成尺寸大,装件数量多,且需要2序装件作业,考虑采用搭积木式立体工艺布局,实现占地面积最小化,同时也实现了成本最优,具体布局形式如下:

图3 侧围总成线立体工艺布局
第1层为地面层,采用回转式柔性滑台实现多车型定位夹具的柔性切换,同时回转式柔性滑台可以实现下一生产序列的车型夹具提前切换至上件工位开始生产,大大缩短车型切换时间。
第2层布置机器人焊接,采用下探式机器人进行焊接,同时利用大臂展机器人进行搬运,可以实现机器人继续在空中层进行补焊作业,完成焊接作业搬运至第一层OP20工序夹具继续进行装件作业,同时利用PLC系统将车型传递至OP20工序。
第3层为第2层错位层,可以实现补焊作业、缓存及转序至焊接主线进行总拼。
经核算,侧围总成焊接采用搭积木式立体工艺布局,相比全地面层布置方案,机器人少了3台、线体复杂度降低、运维成本减少,占地面积下降45%,投资总额下降10%。
2 产线虚拟联调
在线体设计阶段,对产线数据进行虚拟调试,以验证并优化线体方案、优化机器人轨迹及线体节拍、完善PLC程序,减少现场示教周期及工装设备安装时的错误和返工。具体如下:
(1)工位/产线仿真
通过创建工艺仿真环境,创建机器人作业任务,检查机器人焊接过程的干涉性,检查机器人运行的节拍,确定机器人运动的最佳路径等。
(2)离线编程
主要包含2个部分:机器人离线程序及PLC离线程序。机器人轨迹离线编程在工艺仿真过程同步开展,在确认机器人最优路径后编程机器人离线程序。PLC程序编写主要根据设备集成接线原理设计信号表及电气图纸,同时结合工艺流程的电控原理图,编写工装设备正常运行的PLC逻辑程序。
(3)VC调试
首先,在PS仿真软件中完成工艺仿真及机器人离线编程基础上,完善机器人逻辑块配置并创建工装设备及工件的传感器,完成创建VC环境,同时建立PS软件与Simba Box模块的通讯;其次,集成PLC硬件系统,将完成编程的PLC程序载入,同时利用以太网模块建立与Simba Box模块的通讯;最后,利用电气调试PLC电脑对PLC进行调试,控制仿真电脑VC环境中设备运行实现单工位调试、多工位线体联调等。
以某公司车门线建设项目为例,采用虚拟联调技术,利用PLC控制仿真环境工装设备运行,对PLC程序进行可靠性验证,对机器人轨迹进行干涉性及节拍验证(图4)。

图4 车门线PLC系统控制仿真环境虚拟调试
经过验证和完善的PLC电控程序,线体投产后设备故障率减少30%以上,机器人生产节拍达成时间减少30%以上,可以缩短30%以上的生产线生产准备时间,实现线体快速交付投产,缩短新产品投放市场周期。
3 线体的中控系统同步建设
3.1 中控系统建设关键步骤
以本公司商用车焊装车间中控系统为例(图5):

图5 中控系统架构
(1)根据PLC分部及数量搭建可靠的环形工业网络,利用ProfiNet协议接口连接各个PLC;
(2)分类规划PLC的DB(数据块)区域,把设备动作数据及生产参数存储;
(3)搭建OPC通讯服务器,可对DB块进行毫秒级别的数据交换;
(4)根据车间工艺布置图开发PMC界面,以直观的图形界面展示设备运行状况及生产进度,数据来源于通讯服务器采集到的数据。
(5)安装工位摄像头、广播系统、数据显示屏,组成多媒体中控室。
3.2 数据采集与监控
通过采集产线数据(物流信息、生产节拍、设备状态、库存数据),并对数据进行分析、决策,提升企业生产过程的应变能力,实现动态把握及敏捷制造,符合智能工厂要求,其作用体现在以下4点:
(1)工位车型信息追踪
通过采集生产线自动化PLC系统的驾驶室数据,实现对所有工位、工作站的车型代码状态追踪查询功能。
(2)生产线运行状态监控
利用中控显示屏显示生产线各个工位运行的车型状态、实时节拍、报警信息、求援信息、质量信息、物料需求信息等便于管理者实时监控生产状态,同时可进行生产指令的更改发布,提高生产管理效率。
(3)设备底层数据状态采集
通过对设备的底层数据如启停信号、报警信息、工艺参数及震动、温度等状态数值进行采集、记录、分析来实现对设备监控管理,以评估设备健康状态、寿命等。通过采集设备的温度、噪声、电流、震动频率等数据进行大数据分析,输出设备诊断结果,并针对性进行设备预防性维护。
(4)能源管理
对焊接用电、公共动力(包括空压机、水泵、空调照明)用电等进行用电监测、数据统计,输出最优用电方案。
4 建立MES系统实现对产线数据监控
4.1 MES系统建设关键步骤
建立完中控系统后,使计划执行跟踪获得驱动能力,以此基础建立MES系统:
(1)MES系统对接中控系统生产参数数据接口,生产参数包含工位的生产序列、计划序列、车身唯一编号、车型种类;
(2)利用获得的生产参数驱动ERP生产计划安排生产规则下发;
(3)利用获得的生产参数映射工艺数据(车型的差异化信息、机器人控制代码、零件代码、零件图片),与计划数据同步下发;
(4)结合下游涂装车间的排产计划,计算出成品库(WBS)移行机的出入库顺序。
4.2 MES系统主要功能
驾驶室焊装MES系统,可以实现驾驶室制造过程的大数据监控管理。通过物联网与MES服务器连接,采集各类数据保存到数据库中,实现以下可视化监控(图6):

图6 车间生产信息监控画面
(1)生产计划管理
焊装线上件工位,AVI系统控制RFID读写,设备根据生产计划将驾驶室ID(驾驶室唯一码)写入RFID;其它实绩采集点,RFID读写器读RFID获取车辆ID以及过点时间信息。MES系统接收过点信息,匹配指示点配置的实绩触发信息判断是否需要触发物料配送指示以及生产指示,若需要则产生物料指示单、生产指示单并下发至相应看板进行显示。
(2)生产指示下达
物流信息、工艺信息、质量防错信息推送。现场工位增加电子看板,实现生产计划的物流信息推送,工位实时生产车型工艺信息及质量防错信息的推送。
(3)线边物料管理
线边库管理包括线边库存盘点和物料拉动两部分,线边库存盘点实现对线边库信息进行维护管理,并支持库存盘点及库存调整功能。线边拉动实现库房与线边库物料的拉动(图7),其中,部分物料在配送提前工位触发物料配送指示,部分物料在其线边库存低于其安全库存值时,触发产生物料配送指示,库房人员通过库房看板上物料配送指示进行物料配送及线边扫码入库。
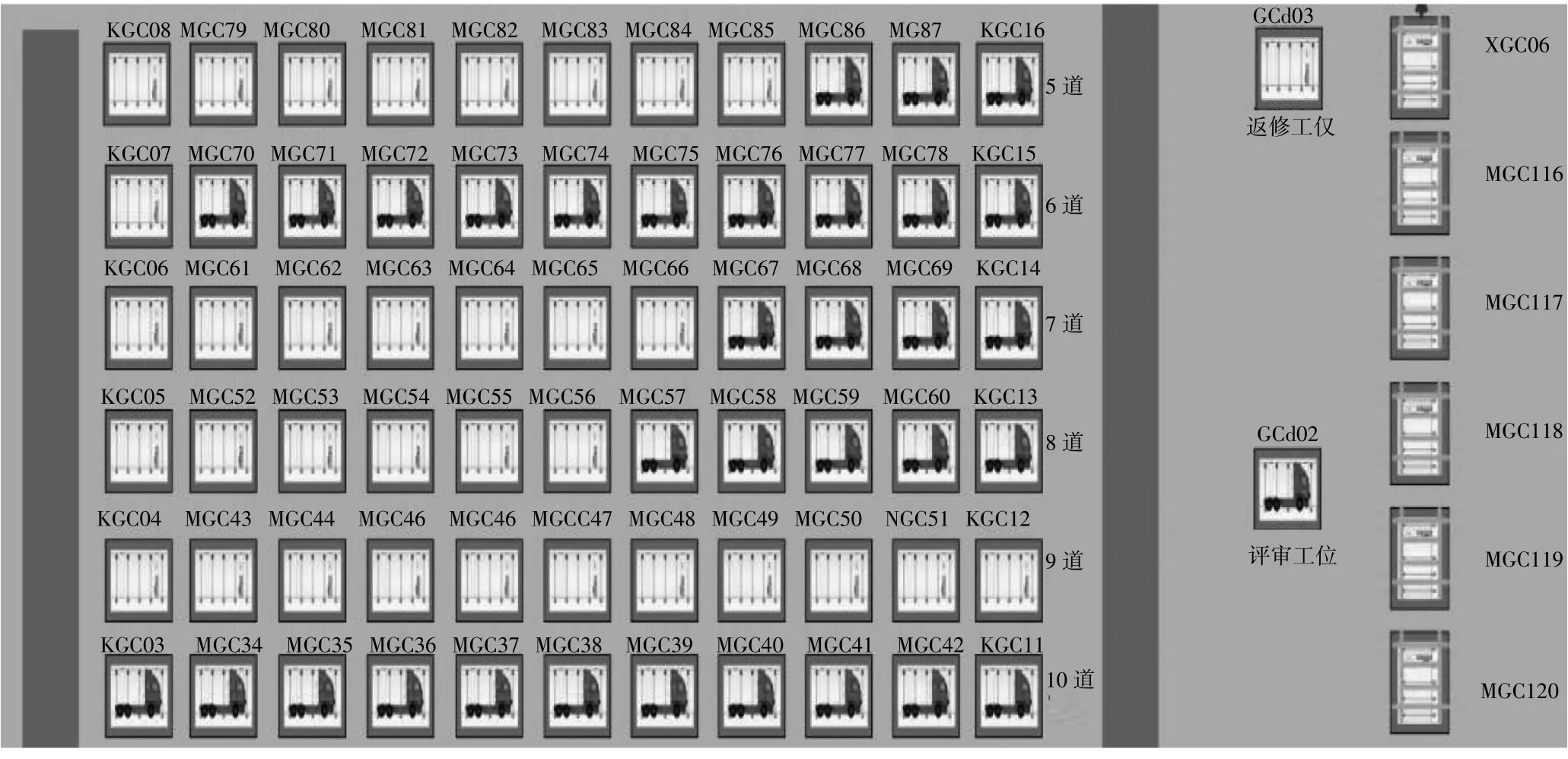
图7 线边库管理与生产计划联动
同时,在重点工位配置扣减工位物料,系统根据经过的车型及其BOM(带工位信息),自动扣减线边库存。
(4)成品库存管理
WBS区域位于焊装和涂装之间,作为两个车间之间的缓冲,实现涂装生产缓存,也具备车身调序功能,该模块可以减少焊装停线对涂装生产的影响。WBS区域设计为全自动化,充分考虑了各种异常情况下进行报警,系统支持干预、手动进行调度指挥。
系统按生产计划智能排序,具体如图8所示。
(5)制造效率分析
生产效率统计。通过统计产量、节拍、工时等数据计算生产效率OEE,突出异常工位,进而提醒管理者进行专项整改,具备报表、平衡墙等图表的生成展示与导出功能。
(6)质量管理
通过采集焊接过程参数数据进行可视化监控及存储分析,对生产过程质量问题的收集管理,实现对质量问题的溯源及追踪,形成有效的过程质量管理。
利用在线精度测量、尺寸测量、拍照扫描等功能提供与生产MES计划相匹配的驾驶室质量数据,并传输至大数据中心进行分析管理、质量预测。
5 当前焊点质量监控的挑战
驾驶室焊装在快节拍生产的情况下,焊点质量管控对管理者是一个不小的挑战。焊点质量常因板件、设备参数、电极表面状态等因素导致焊点熔核过小、虚焊、针眼等质量问题。由于焊点的板间熔化不可见,焊点质量管控方式一直以来都是汽车厂家重点研究对象。
目前对焊点质量管控常见的方法有:(1)工位焊点凿检:即非破坏凿检,一般抽样10%驾驶室焊点、5%产量的车身进行凿点检查。(2)无损探伤检测:即超声波无损探伤,一般每天检测1台驾驶室,抽样30%焊点;(3)整车拆解检测:全驾驶室破坏性拆解,每生产1万台驾驶室抽样全破1台车身。
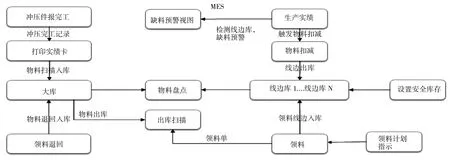
图8 WBS库区排序监控
现有抽样焊点质量检验方法效率低、成本高,不能达到100%检测,且焊接参数和质量数据没有实时的互通,发现质量问题后再去追溯,缺乏时效性。
通过数据采集软件在线监测每一个焊点的焊接过程参数并实现数据存储,并基于异常数据进行针对性检测,可减少破坏性检测,降低产线检测率;将海量复杂的焊点参数数字化、透明化,对全部焊点参数实时监控,异常结果反馈回焊接工艺控制中心,可实现对焊点异常的快速处理;对焊点管控即时化,即采取信息化防错、焊点计数器、电极自动修磨器、伺服焊钳等,第一时间发现或避免不良焊点、漏焊的产生和流出。
6 结语
通过项目方案建模、工艺仿真、虚拟调试等数字化技术对驾驶室焊装线体进行规划、设计及建设,可以切实减少焊装线体建设过程的错误及返工,缩短建设周期及投产时间。利用MES系统、中控系统、质量管理系统等数字化技术对焊装线运行进行管理,实现生产过程的敏捷智造及可视化监控,缩短产品交货期,减少产品质量风险。通过以上数字化技术的运用,项目建设速度提升30%以上,规避了项目建设风险点80%以上,生产效率提升25%以上,规避了90%的质量问题点流出。
猜你喜欢
中国中医药现代远程教育(2022年22期)2022-12-05
汽车实用技术(2022年14期)2022-07-30
机电工程技术(2022年5期)2022-06-23
汽车实用技术(2022年5期)2022-04-02
北京工业大学学报(2021年9期)2021-09-14
装备制造技术(2020年11期)2021-01-26
装备制造技术(2020年1期)2020-12-25
汽车与驾驶维修(维修版)(2020年6期)2020-07-06
锻造与冲压(2020年8期)2020-04-20
汽车工程(2019年2期)2019-03-11