灵巧手运动性能分析与仿真
2023-01-12 03:56李可歌王汝贵
装备制造技术 2022年10期
李可歌,王汝贵
(广西大学 机械工程学院,广西 南宁 530004)
0 引言
灵巧手作为一种特殊的末端执行器,大多数现有灵巧手可以实现简单的抓持、夹取以及抓握功能,但和人手的高度灵巧性相比,依旧存在较大差距。随着技术不断发展和工业生产生活需要,具有高操作能力和较强适应性的灵巧手正被广泛研究。目前,国内外有关灵巧手灵巧性的研究[1,2],主要集中在灵巧手对目标物体的捏取、夹持、抓握方面[3,4],而鲜有研究从如何使物体旋转方面来考虑灵巧性[5]。
运动学分析是研究关节空间与末端执行器空间关系的基础。Lu等[6]利用D-H方法分析了康复机器人机构的运动学。Shim等[7]采用闭环矢量法研究了机器人夹持器的运动学。He等[8]提出了一种用于缠绕聚合物驱动的手指机构运动学设计的系统方法。
本研究对一种仿拇指和食指操作物体运动特性的灵巧手进行运动性能分析与仿真。通过闭环矢量法对灵巧手的手指机构进行运动学分析,得到灵巧手的手指工作空间,对灵巧手的灵巧性作进一步分析。然后运用三维软件对灵巧手捏取并旋转物体的运动过程进行仿真分析,验证该灵巧手的灵巧性和可行性。
1 灵巧手结构
图1为一种能使物体产生旋转运动的灵巧手模型[9]。该灵巧手整体结构简单,由两根手指和手掌机构组成。该灵巧手共有4个自由度,其中手掌机构和手指机构均有2个自由度,一方面可以更好地适应目标物体形状,具有较高的抓握能力;另一方面能够实现被抓取物体的转动,具有高度的灵巧性。
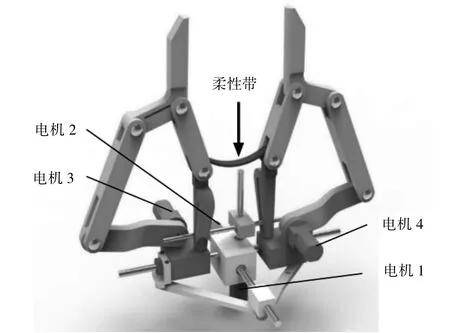
图1 灵巧手整体结构
2 手指运动学分析
图2为灵巧手的手指机构结构简图。以点O1为原点建立局部平面坐标系O1-y1z1,Li(i=1,2,…,5,7)为连杆的长度,L6为关节点JW间的距离,θi(i=1,2,…,6)代表Li(i=1,2,…,6)与y1轴正方向的夹角;α0代表杆L3和L4间的夹角∠JKW,α1代表杆L7与y1轴正方向的夹角,α2代表杆L3和L7间的恒定夹角∠JKN。
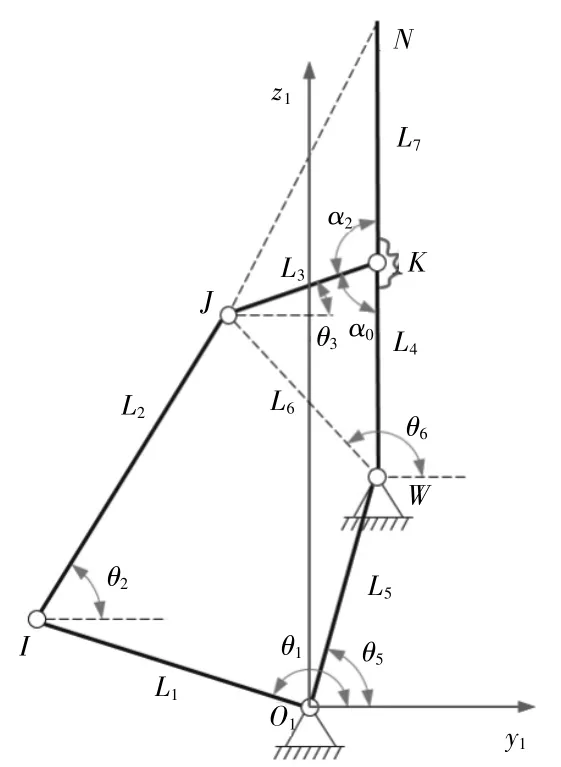
图2 灵巧手手指捏取物体的结构
当灵巧手捏取物体时,手指的近指节和远指节通过扭簧暂时固定连接。由于远指节与杆件L3处于同一根刚性杆件上,故此时手指的近指节、远指节和杆件L3可看成是一个整体,整体运动学参数可与杆L6保持一致。取杆件L1为原动件,θ1为输入角,则θ2与θ6为输出角。
由于α0为近指节和杆件L3暂时固定连接的角度,根据余弦定理可知:

根据灵巧手整体设计以及位置关系可知,L5与θ5可看作已知参数。
2.1 位置正解
采取闭环矢量法对处于捏取物体状态的灵巧手的手指进行运动学分析。
根据回路O1IJW,有:

将其表示为复数形式,即:

将式(3)的实部和虚部分离,可得:

将式(4)进一步简化为:

其中,
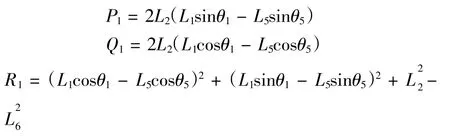
故可得到输出角θ2的解析表达式为:

同理,可以解得输出角θ6为:

在中△JKW,利用余弦定理可得:

根据以上求得的值可依次得到点I、J、K、N的坐标。
2.2 位置反解
已知N点坐标(yN,zN),设K点坐标(yK,zK),J点坐标(yJ,zJ),由几何关系知:
根据图2中连杆几何关系,建立关于杆L2的约束方程如下:

将式(15)改写为:

其中,
2.3 手指工作空间
手指的工作空间可以直接表示灵巧手的输出端能达到的最大范围。对所设计的灵巧手的手指结构参数赋值:L1=54 mm、L2=66 mm、L3=27 mm、L4=45 mm、L7=40 mm,可以得到手指工作空间,如图3所示。
从图3中可以看出,指尖在z轴上可移动范围较大,为53 mm~128 mm,在y轴上可移动范围为-24 mm~78 mm。手指的工作空间为月牙形,其中没有空腔,可以实现连贯运动。
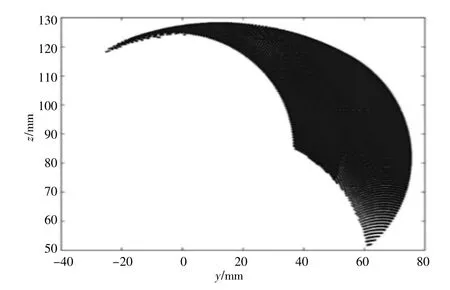
图3 手指末端运动工作空间
3 手指捏取物体仿真分析
以捏取一个直径为20 mm,长130 mm的圆柱物体P为例,如图4所示。在捏取过程中,各电机驱动函数如表1所示。
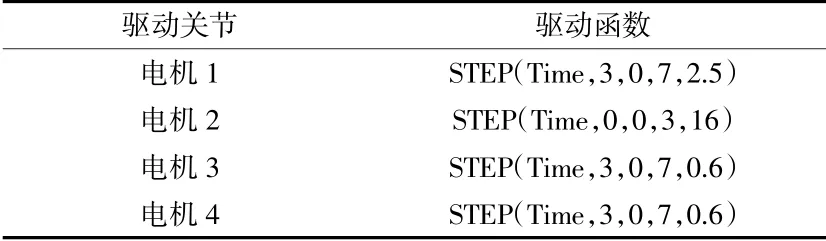
表1 电机1-4驱动函数
在捏取运动开始前,灵巧手的手指是张开一定角度的,如图4(a)所示。此时,手指与目标物体并没有任何接触;在0~3 s,电机2开始转动,手指1和手指2缓慢靠近物体P并夹紧物体,如图4(b)所示;然后,电机2停止转动,在3~7 s,电机1和电机3共同配合驱动手指1和手指2,使物体P旋转一定角度,如图4(c)所示。在捏取运动过程中,相关的电机驱动参数变化如图5~7所示。
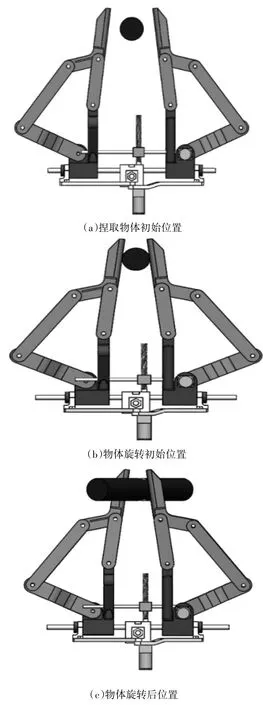
图4 灵巧手旋转物体仿真

图5 电机1和电机2的驱动位移曲线
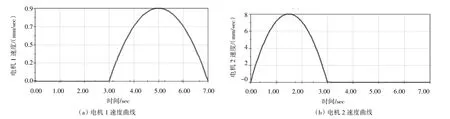
图6 电机1和电机2的速度曲线
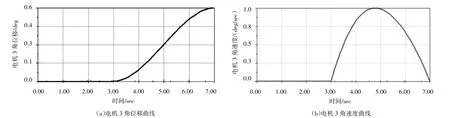
图7 电机3的驱动角位移和角速度曲线
图8为灵巧手旋转物体P的运动路径,从图8中的运动轨迹可以看出,灵巧手先是沿方向运动,使手指捏住物体,然后沿方向和方向共同运动,使物体产生旋转运动,验证了灵巧手的灵巧性和可行性。
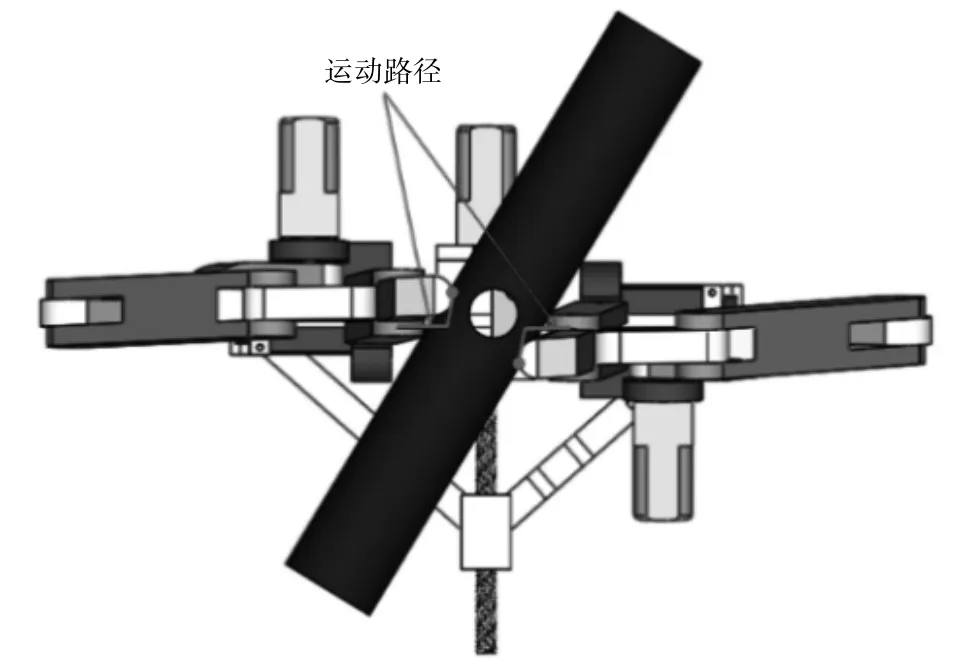
图8 灵巧手旋转物体P的运动路径
4 结语
本文以一种仿拇指和食指操作物体运动特性的灵巧手为研究对象,采用闭环矢量法建立运动学模型,得到手指末端与驱动角之间的关系。在运动学分析的基础上,得到手指工作空间。运用三维软件对灵巧手捏取并旋转物体的运动过程进行仿真分析,验证了该灵巧手的灵巧性和可行性。
本文扩展了灵巧手灵巧性的物理意义,增加了旋转操作灵巧性,为以后灵巧手在不同场合的应用提供了重要技术参考。
猜你喜欢
实用手外科杂志(2022年2期)2022-08-31
网络安全技术与应用(2022年5期)2022-07-26
散文诗世界(2021年12期)2021-12-17
小聪仔(婴儿版)(2020年12期)2021-01-26
河北省科学院学报(2020年1期)2020-05-25
重型机械(2019年3期)2019-08-27
中国设备工程(2017年11期)2017-06-29
海军航空大学学报(2015年1期)2015-11-11
少年科学(2015年8期)2015-08-13
筑路机械与施工机械化(2014年8期)2014-03-01